 electronics
electronicsSimilar presentations:


")

. Основные понятия")





Математический аппарат анализа и синтеза цифровых САУ
1.
Математический аппарат анализа и синтеза цифровых САУПонятие о решетчатой функции и её разности
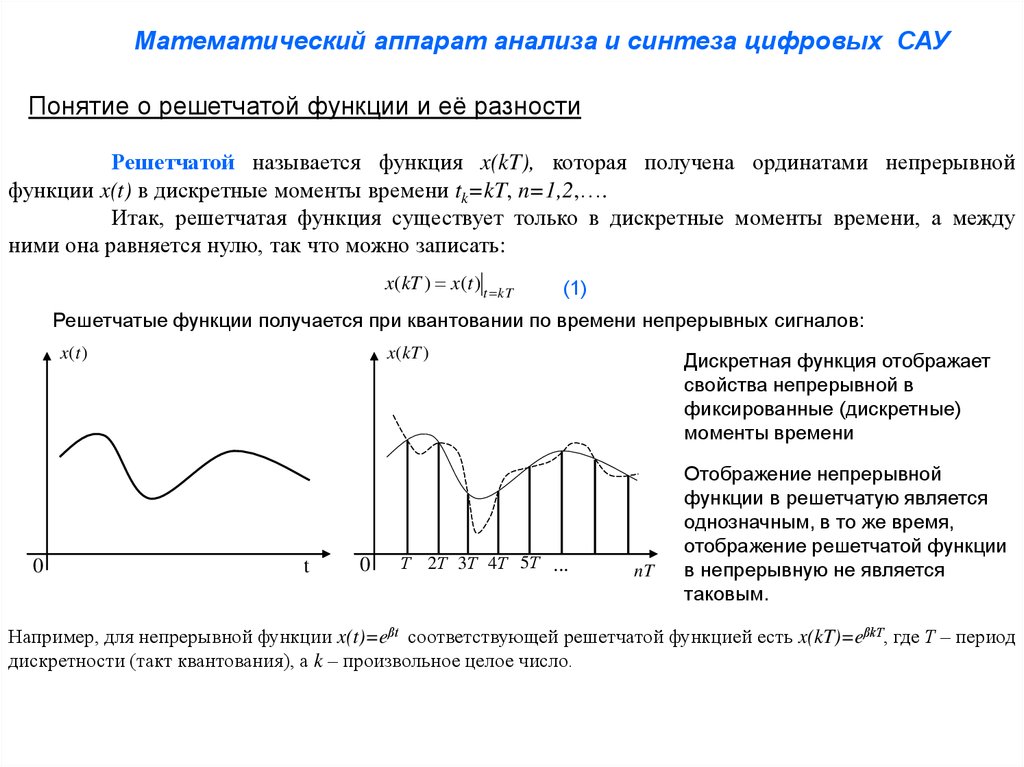
Решетчатой называется функция x(kT), которая получена ординатами непрерывной
функции x(t) в дискретные моменты времени tk=kT, n=1,2,….
Итак, решетчатая функция существует только в дискретные моменты времени, а между
ними она равняется нулю, так что можно записать:
x(kT ) x(t ) t kT
(1)
Решетчатые функции получается при квантовании по времени непрерывных сигналов:
x (t )
0
x(kT )
t
0
Т 2Т 3Т 4Т 5Т ...
Дискретная функция отображает
свойства непрерывной в
фиксированные (дискретные)
моменты времени
nT
Отображение непрерывной
функции в решетчатую является
однозначным, в то же время,
отображение решетчатой функции
в непрерывную не является
таковым.
Например, для непрерывной функции x(t)=eβt соответствующей решетчатой функцией есть x(kT)=eβkT, где Т – период
дискретности (такт квантования), а k – произвольное целое число.
2.
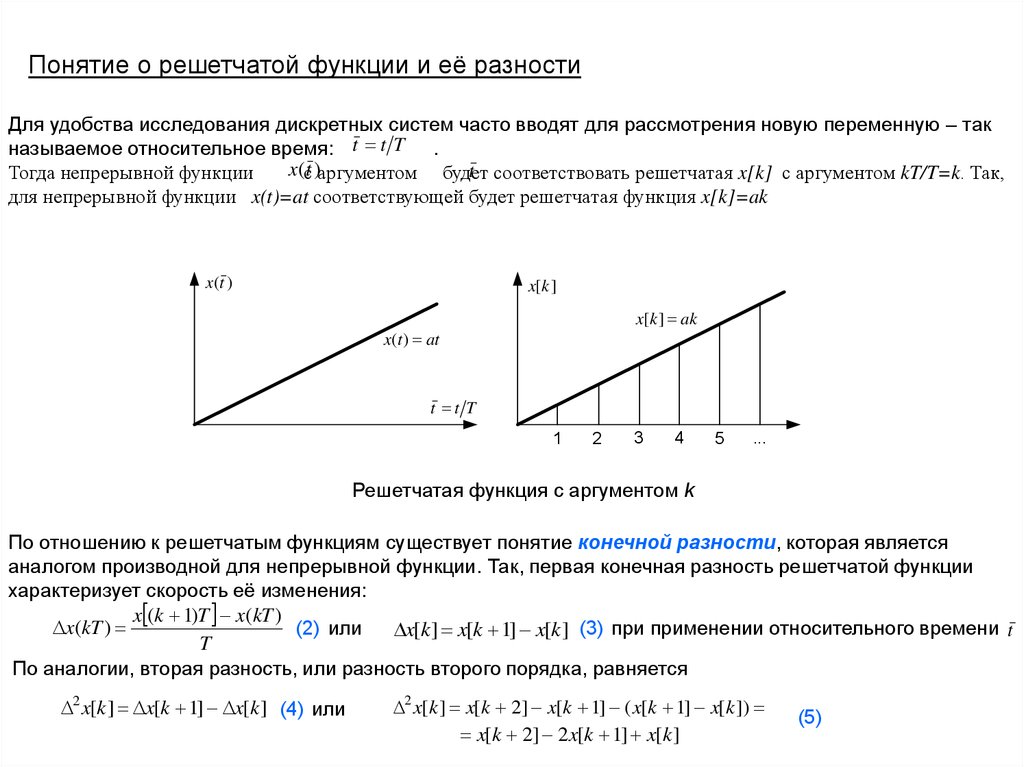
Понятие о решетчатой функции и её разностиДля удобства исследования дискретных систем часто вводят для рассмотрения новую переменную – так
называемое относительное время: t t T .
x(tс )аргументом будет
t соответствовать решетчатая x[k] с аргументом kT/T=k. Так,
Тогда непрерывной функции
для непрерывной функции x(t)=at соответствующей будет решетчатая функция x[k]=ak
x(t )
x[k ]
x[k ] ak
x(t ) at
t t T
1
2
3
4
5
...
Решетчатая функция с аргументом k
По отношению к решетчатым функциям существует понятие конечной разности, которая является
аналогом производной для непрерывной функции. Так, первая конечная разность решетчатой функции
характеризует скорость её изменения:
x (k 1)T x(kT )
x(kT )
(2) или
x[k ] x[k 1] x[k ] (3) при применении относительного времени t
T
По аналогии, вторая разность, или разность второго порядка, равняется
2 x[k ] x[k 1] x[k ] (4) или
2 x[k ] x[k 2] x[k 1] ( x[k 1] x[k ])
x[k 2] 2 x[k 1] x[k ]
(5)
3.
x[k]x[0]
Понятие о решетчатой функции и её разности
x[6] x[7]
x[1]
x[2]
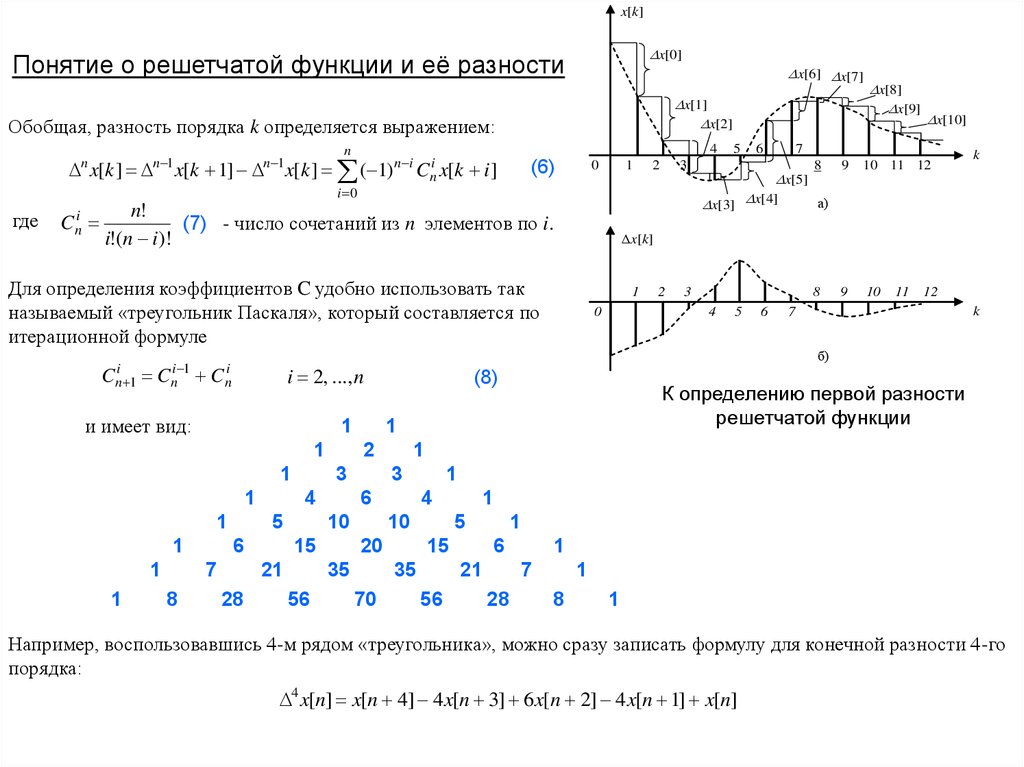
Обобщая, разность порядка k определяется выражением:
n 1
x[k ]
n
n 1
x[k 1]
n
x[k ] ( 1)
n i
i 0
где
Cni
4
Cni x[k
i]
(6)
0
1
n!
(7) - число сочетаний из n элементов по i.
i!(n i)!
C ni 1
C ni
1
1
1
1
1
1
1
1
5
6
7
8
21
28
6
15
56
4
20
9
10 11 12
8
9
10
k
2
3
5
6
11
12
k
7
К определению первой разности
решетчатой функции
1
5
15
35
70
8
1
10
35
7
1
3
10
6
x[5]
x[4]
а)
x[3]
4
(8)
2
4
1
0
1
3
5
б)
i 2, ..., n
и имеет вид:
3
x[10]
x[k]
Для определения коэффициентов C удобно использовать так
называемый «треугольник Паскаля», который составляется по
итерационной формуле
C ni 1
2
x[8]
x[9]
1
6
21
56
1
7
28
1
8
1
Например, воспользовавшись 4-м рядом «треугольника», можно сразу записать формулу для конечной разности 4-го
порядка:
4 x[n] x[n 4] 4 x[n 3] 6 x[n 2] 4 x[n 1] x[n]
4.
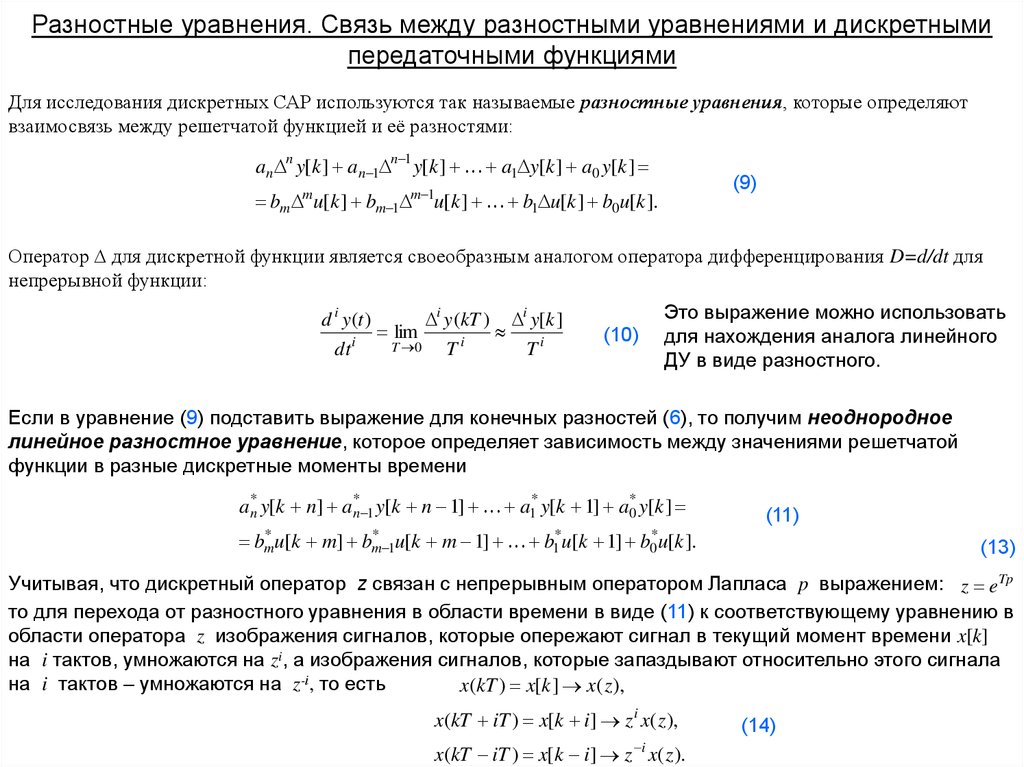
Разностные уравнения. Связь между разностными уравнениями и дискретнымипередаточными функциями
Для исследования дискретных САР используются так называемые разностные уравнения, которые определяют
взаимосвязь между решетчатой функцией и её разностями:
an n y[k ] an 1 n 1 y[k ] a1 y[k ] a0 y[k ]
(9)
bm mu[k ] bm 1 m 1u[k ] b1 u[k ] b0u[k ].
Оператор ∆ для дискретной функции является своеобразным аналогом оператора дифференцирования D=d/dt для
непрерывной функции:
d i y (t )
i y (kT ) i y[k ]
lim
T 0
dt i
Ti
Ti
(10)
Это выражение можно использовать
для нахождения аналога линейного
ДУ в виде разностного.
Если в уравнение (9) подставить выражение для конечных разностей (6), то получим неоднородное
линейное разностное уравнение, которое определяет зависимость между значениями решетчатой
функции в разные дискретные моменты времени
an* y[k n] an* 1 y[k n 1] a1* y[k 1] a0* y[k ]
bm* u[k
m] bm* 1u[k
m 1] b1*u[k
(11)
1] b0*u[k ].
(13)
Учитывая, что дискретный оператор z связан с непрерывным оператором Лапласа p выражением: z eTp
то для перехода от разностного уравнения в области времени в виде (11) к соответствующему уравнению в
области оператора z изображения сигналов, которые опережают сигнал в текущий момент времени x[k]
на i тактов, умножаются на zi, а изображения сигналов, которые запаздывают относительно этого сигнала
на i тактов – умножаются на z-і, то есть
x(kT ) x[k ] x( z ),
x(kT iT ) x[k i] z i x( z ),
i
x(kT iT ) x[k i] z x( z ).
(14)
5.
Разностные уравнения. Связь между разностными уравнениями и дискретнымипередаточными функциями
По таким правилам уравнение (11) преобразуется к виду
(an* z n an* 1 z n 1 a1* z a0* ) y ( z )
(bm* z m bm* 1 z m 1 b1* z b0* )u ( z )
(15)
откуда легко определяется дискретная передаточная функция (ДПФ) импульсной системы в
полиномиальной форме как отношение изображений выходного сигнала к входному при нулевых
начальных условиях
y ( z ) bm* z m bm* 1 z m 1 b1* z b0*
W ( z)
(16)
u ( z ) an* z n an* 1 z n 1 a1* z a0*
условием физической реализации передаточной функции ДПФ является m≤n, т.е., степень полинома
числителя не должна превышать степень полинома знаменателя. Если это условие не выполняется, это
означает, что выходной сигнал опережает входной, что невозможно с диалектической точки зрения.
Полином Gn(z) в знаменателе ДПФ называется характеристическим полиномом (Denominator), ур-ние
Gn ( z ) 0
– характеристическим уравнением, а его корни
Pd [ pd 1 , pd 2 , ..., pdk ]
– дискретными полюсами (Poles), или собственными числами (Eigen Value) системы.
Полином Hm(z) в числителе ДПФ называют полиномом воздействия (Numerator). Корни уравнения
H m ( z) 0
называются дискретными нулями (Zeros):
Z d [ z d 1 , z d 2 , ..., z dm ]
6.
Разностные уравнения. Связь между разностными уравнениями и дискретнымипередаточными функциями
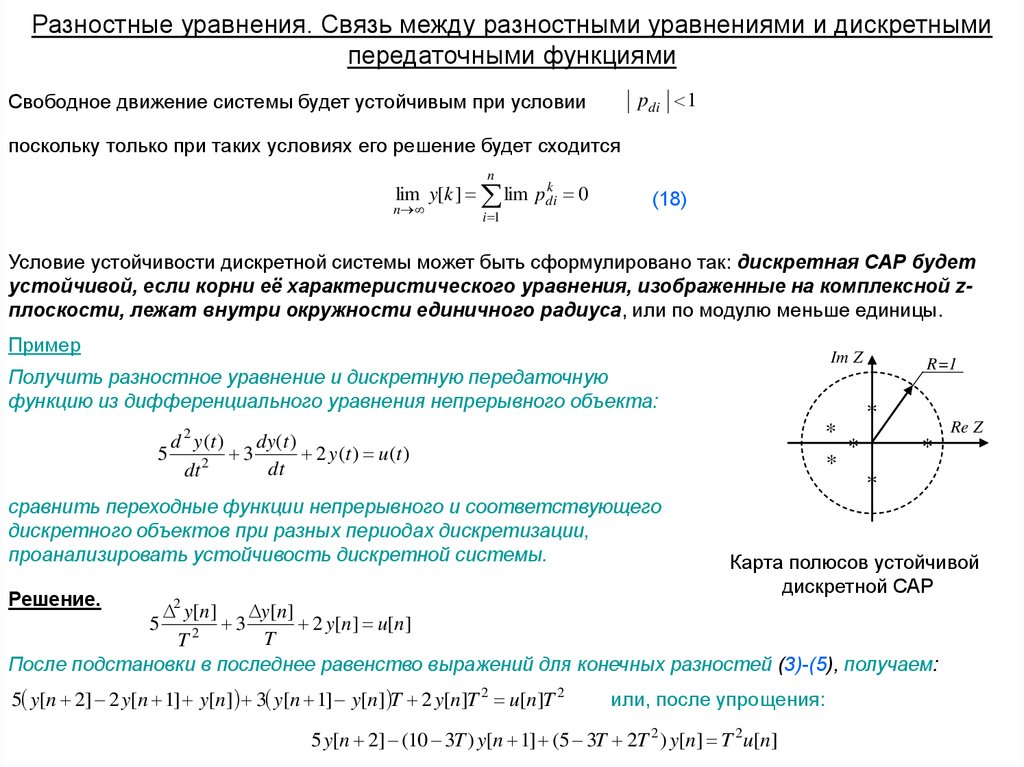
pdi 1
Свободное движение системы будет устойчивым при условии
поскольку только при таких условиях его решение будет сходится
n
k
lim y[k ] lim pdi
0
n
i 1
(18)
Условие устойчивости дискретной системы может быть сформулировано так: дискретная САР будет
устойчивой, если корни её характеристического уравнения, изображенные на комплексной zплоскости, лежат внутри окружности единичного радиуса, или по модулю меньше единицы.
Пример
Im Z
Получить разностное уравнение и дискретную передаточную
функцию из дифференциального уравнения непрерывного объекта:
*
*
*
d 2 y (t )
dy(t )
5
3
2 y (t ) u(t )
dt
dt 2
сравнить переходные функции непрерывного и соответствующего
дискретного объектов при разных периодах дискретизации,
проанализировать устойчивость дискретной системы.
Решение.
R=1
*
Re Z
*
*
Карта полюсов устойчивой
дискретной САР
2 y[n ]
y[n ]
5
3
2 y[n] u[n]
2
T
T
После подстановки в последнее равенство выражений для конечных разностей (3)-(5), получаем:
5 y[n 2] 2 y[n 1] y[n] 3 y[n 1] y[n] T 2 y[n]T 2 u[n]T 2
или, после упрощения:
5 y[n 2] (10 3T ) y[n 1] (5 3T 2T 2 ) y[n] T 2u[n]
7.
Разностные уравнения. Связь между разностными уравнениями и дискретнымипередаточными функциями
Записываем последнее разностное уравнение в операторной форме
[5z 2 (10 3T ) z (5 3T 2T 2 )] y( z ) T 2u( z )
y( z)
T2
W ( z)
u( z ) 5z 2 (10 3T ) z (5 3T 2T 2 )
и получаем ДПФ
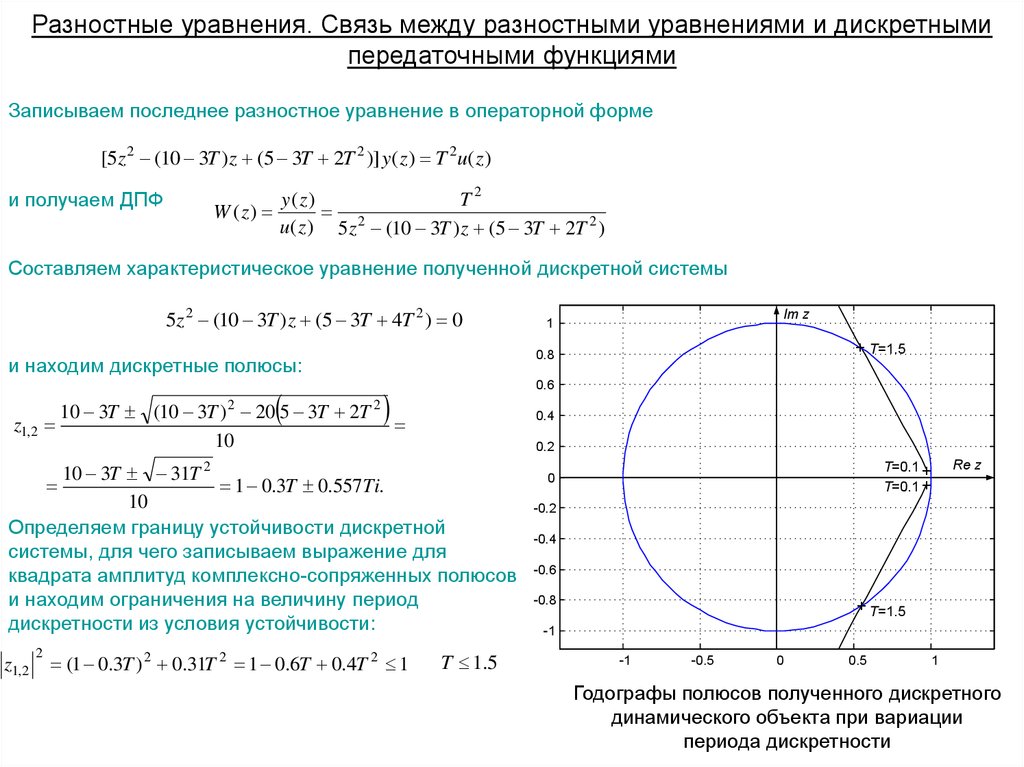
Составляем характеристическое уравнение полученной дискретной системы
5z 2 (10 3T ) z (5 3T 4T 2 ) 0
0.6
10 3T (10 3T ) 2 20 5 3T 2T 2
10
0.4
0.2
10 3T 31T
1 0.3T 0.557Ti.
10
Определяем границу устойчивости дискретной
системы, для чего записываем выражение для
квадрата амплитуд комплексно-сопряженных полюсов
и находим ограничения на величину период
дискретности из условия устойчивости:
2
z1, 2
2
+ T=1.5
0.8
и находим дискретные полюсы:
z1,2
Im z
1
(1 0.3T ) 2 0.31T 2 1 0.6T 0.4T 2 1
T 1.5
T=0.1 +
T=0.1 +
0
Re z
-0.2
-0.4
-0.6
-0.8
+ T=1.5
-1
-1
-0.5
0
0.5
1
Годографы полюсов полученного дискретного
динамического объекта при вариации
периода дискретности
8.
Разностные уравнения. Связь между разностными уравнениями и дискретнымипередаточными функциями
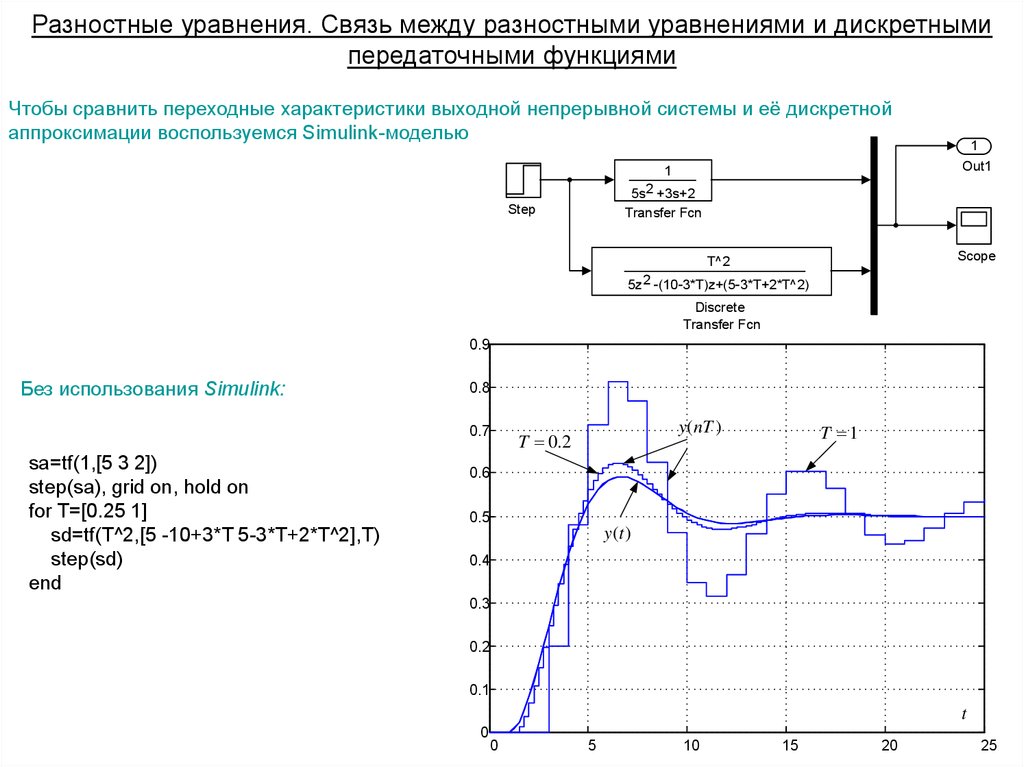
Чтобы сравнить переходные характеристики выходной непрерывной системы и её дискретной
аппроксимации воспользуемся Simulink-моделью
1
Out1
1
5s2 +3s+2
Transfer Fcn
Step
Scope
T^2
5z 2 -(10-3*T)z+(5-3*T+2*T^2)
Discrete
Transfer Fcn
0.9
Без использования Simulink:
0.8
0.7
sa=tf(1,[5 3 2])
step(sa), grid on, hold on
for T=[0.25 1]
sd=tf(T^2,[5 -10+3*T 5-3*T+2*T^2],T)
step(sd)
end
y (nT )
T 0.2
T 1
0.6
0.5
y (t )
0.4
0.3
0.2
0.1
t
0
0
5
10
15
20
25
9.
Дискретное преобразование ЛапласаКак известно, непрерывная функция времени x(t) при одностороннем преобразовании Лапласа
отображается в функцию комплексной переменной x(p):
L x(t ) x( p) x(t )e pt dt
(19)
–
комплексная
переменная
p
j
0
где
Для решетчатых функций таким же способом вводится понятие дискретного преобразования Лапласа:
D x(kT ) x ( p) x(kT )e pkT
n 0
(20)
где D – символ дискретного преобразования,
x*(p) – функция, которая получена в результате дискретного
преобразования решетчатой функции x(kT).
Если ввести к рассмотрению относительное время, имеем:
D x[k ] x ( p) x[k ]e pk
n 0
(21)
или, при использовании новой безразмерной переменной q=pT:
D x[k ] x (q) x[k ]e qk
(22)
n 0
Пример Найти дискретное преобразование Лапласа для единичной решетчатой функции x[k]=1[k].
D 1( k )
Решение. В соответствии с выражением (20) находим:
1(k )e
k 0
qk
e qk 1 e q e 2 q e 3q
k 0
Используя известную формулу для суммы элементов геометрической прогрессии, окончательно имеем
D 1(k )
1
1 e q
eq
eq 1
10.
Дискретное преобразование ЛапласаОсновные свойства дискретного преобразования Лапласа:
1) поскольку дискретное преобразование Лапласа определяет связь между функцией и её изображением только в
моменты t=nT, то разным выходным функциям x(t), которые совпадают в эти моменты времени, будет
соответствовать одна и та же функция x*(p). Итак, невозможно однозначно восстановить функцию x(t) из x*(p) для
произвольного момента времени t.
2) легко доказать, что функция x*(p) является периодической вдоль мнимой оси jω комплексной плоскости, а её
период составляет ωs=2π/T. Если принять, что i – произвольное целое число, то математически это свойство
дискретного преобразования Лапласа можно записать так:
x ( p ) x ( p i s )
3) функция x*(p) является иррациональной относительно p, поскольку содержит множители типа e-pT. Это
существенно отличает её от большинства непрерывных функций.
11.
Z- преобразование и его свойстваДля исследования свойств цифровых систем широко используется и так называемое Z- преобразование, которое
следует из дискретного преобразования Лапласа при
(23)
z e pT e q
Итак, по аналогии с дискретным преобразованием, можем записать:
Z x[k ] x( z ) x[k ]z k
(24)
k 0
Так, для задачи из примера Z- преобразование заданной единичной решетчатой функции будет
Z 1(k )
eq
z
e q 1 z e q z 1
Обозначим некоторые свойства Z- преобразования:
1) условием существования функции x(z) есть определенность функции x(t) для всех моментов времени t=kT;
2) функция x(z) является рациональной относительно комплексной переменной z;
3) для какой-нибудь функции времени x(t), которая имеет дискретное преобразование Лапласа, существует и Zпреобразование;
4) одной функции x(z) соответствует множество функций времени x(t), которые совпадают только в моменты
времени t=kT;
5) преобразование z=epT отображает всю левую полуплоскость комплексной плоскости p в круг единичного
радиуса на комплексной плоскости z с центром в начале координат;
6) свойство суперпозиции:
Z {x1[k ] x2 [k ]} Z {x1[k ]} Z {x2 [k ]} x1 ( z ) x2 ( z )
7) свойство линейности:
Z {ax[k ]} Z {x1[k ]} aZ {x[k ]} ax ( z )
12.
Z- преобразование и его свойства8) свойство сдвига во времени (запаздывание и опережение):
Z x[k 1] z 1 Z x[k ] z 1 x( z )
Z x[k n] z n Z x[k ] z n x( z )
Z x[k 1] z ( x( z ) x[0])
Z x[k n] z n x( z ) z n x[0] ... zx[n 1]
9) свертке оригиналов соответствует произведение изображений:
k
Z x[i ] y[k i ] Z {x[k ]} Z { y[k ]} x ( z ) y ( z )
i 0
10) теорема о граничном значении:
x[0] lim x ( z )
x[1] lim z{x ( z ) x[0]}
z
z
x[2] lim z 2 {x ( z ) x[0] x[1]z 1}
z
lim x[k ] lim ( z 1) x ( z )
k
11) дифференцирование изображения:
z 1
Z{k x[k ]}
dx( z )
dz
12) Z- преобразование функции не зависит от величины T. Действительно, поскольку время не входит в выражение
(24), то выражение для x(z) не зависит от величины T.
13.
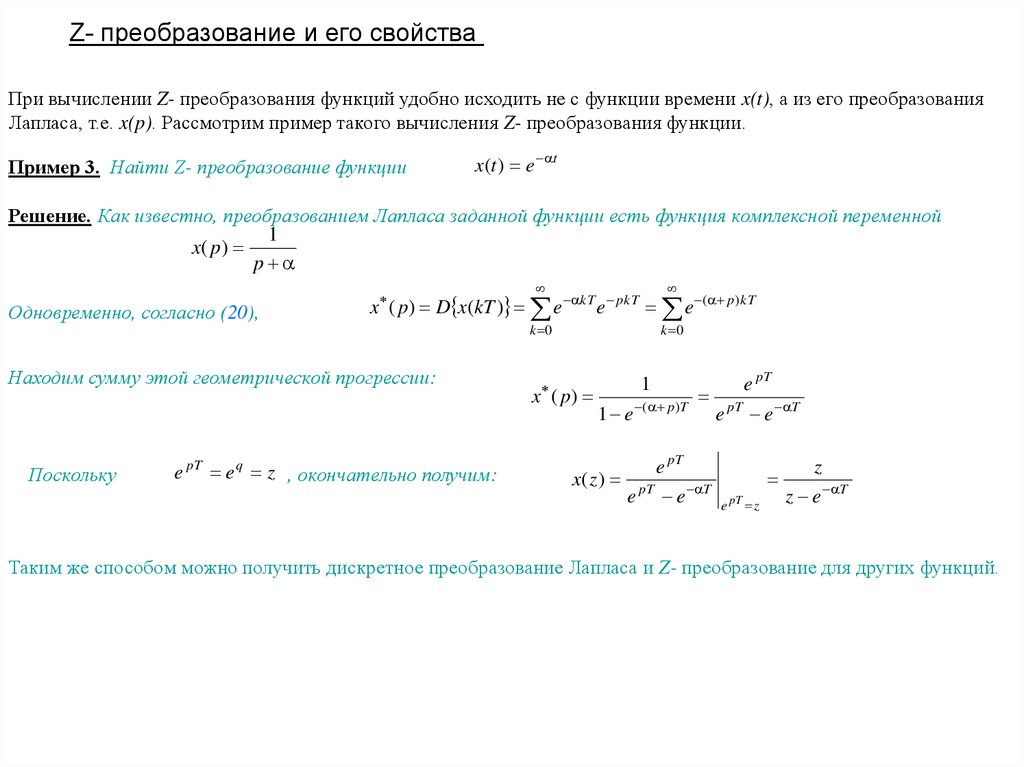
Z- преобразование и его свойстваПри вычислении Z- преобразования функций удобно исходить не с функции времени x(t), а из его преобразования
Лапласа, т.е. x(p). Рассмотрим пример такого вычисления Z- преобразования функции.
Пример 3. Найти Z- преобразование функции
x(t ) e t
Решение. Как известно, преобразованием Лапласа заданной функции есть функция комплексной переменной
1
x( p)
p
Одновременно, согласно (20),
Находим сумму этой геометрической прогрессии:
Поскольку
x ( p) D x(kT ) e
e pT e q z , окончательно получим:
kT pkT
e
k 0
e ( p ) kT
k 0
x ( p)
1
1 e ( p )T
x( z )
e pT
e pT e T
e pT
e
pT
e
T
e pT z
z
z e T
Таким же способом можно получить дискретное преобразование Лапласа и Z- преобразование для других функций.
14.
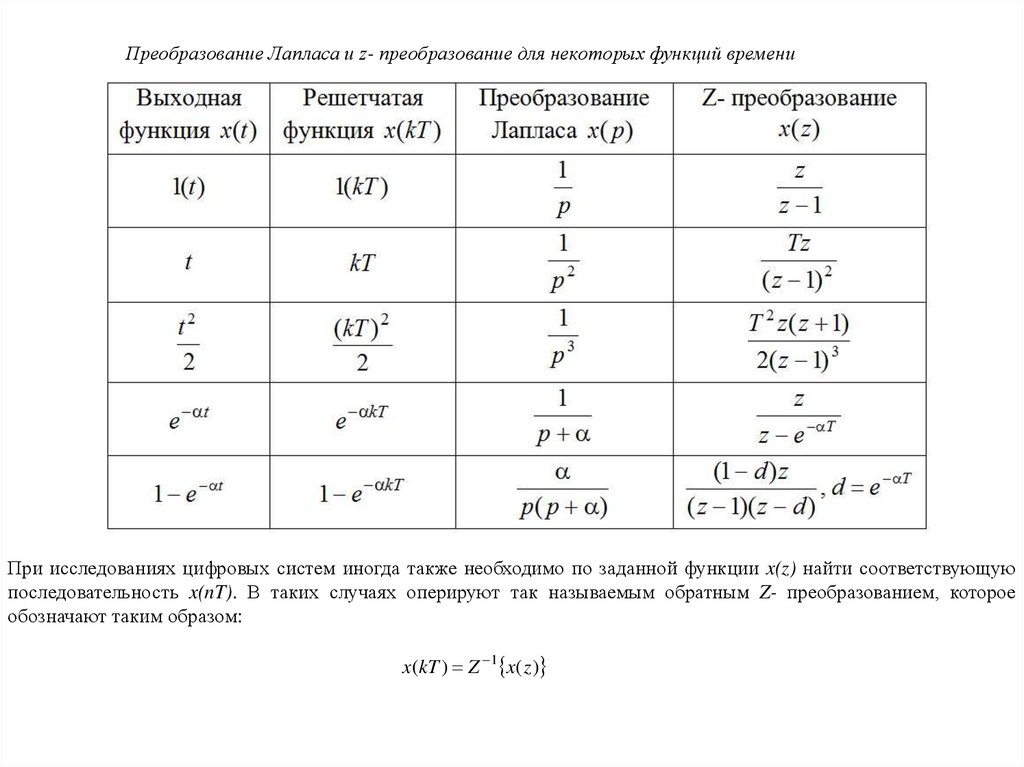
Преобразование Лапласа и z- преобразование для некоторых функций времениПри исследованиях цифровых систем иногда также необходимо по заданной функции x(z) найти соответствующую
последовательность x(nT). В таких случаях оперируют так называемым обратным Z- преобразованием, которое
обозначают таким образом:
x(kT ) Z 1 x( z )
15.
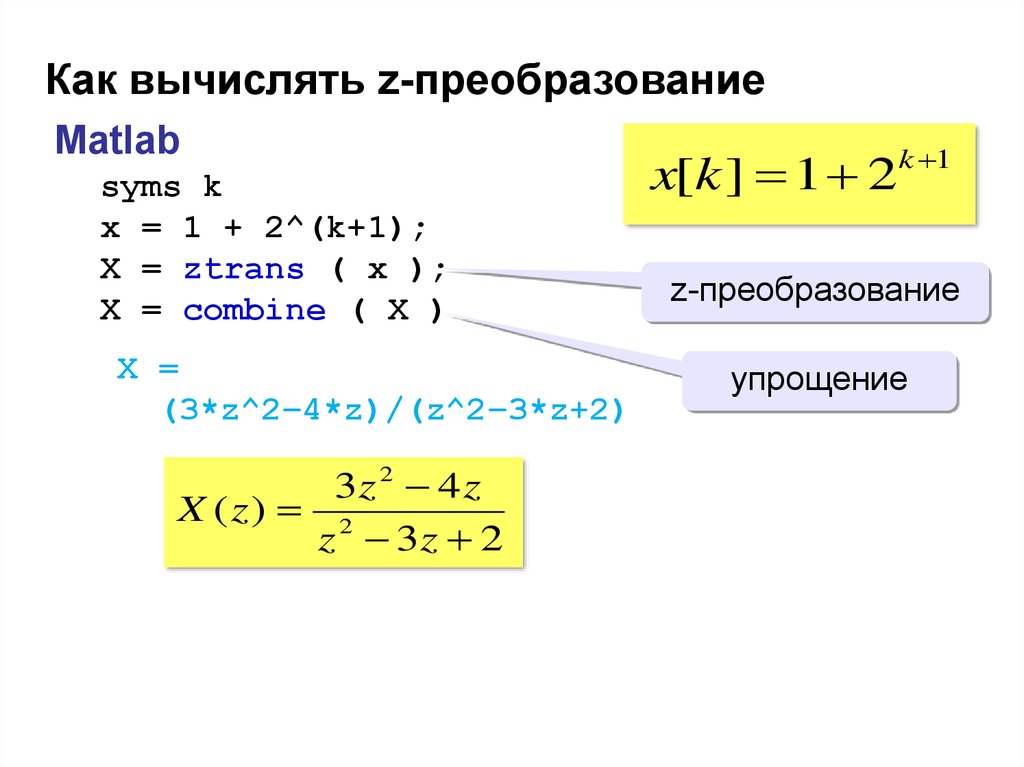
Как вычислять z-преобразованиеMatlab
syms k
x = 1 + 2^(k+1);
X = ztrans ( x );
X = combine ( X )
X =
(3*z^2–4*z)/(z^2–3*z+2)
3z 2 4 z
X ( z) 2
z 3z 2
x[k ] 1 2
k 1
z-преобразование
упрощение
16.
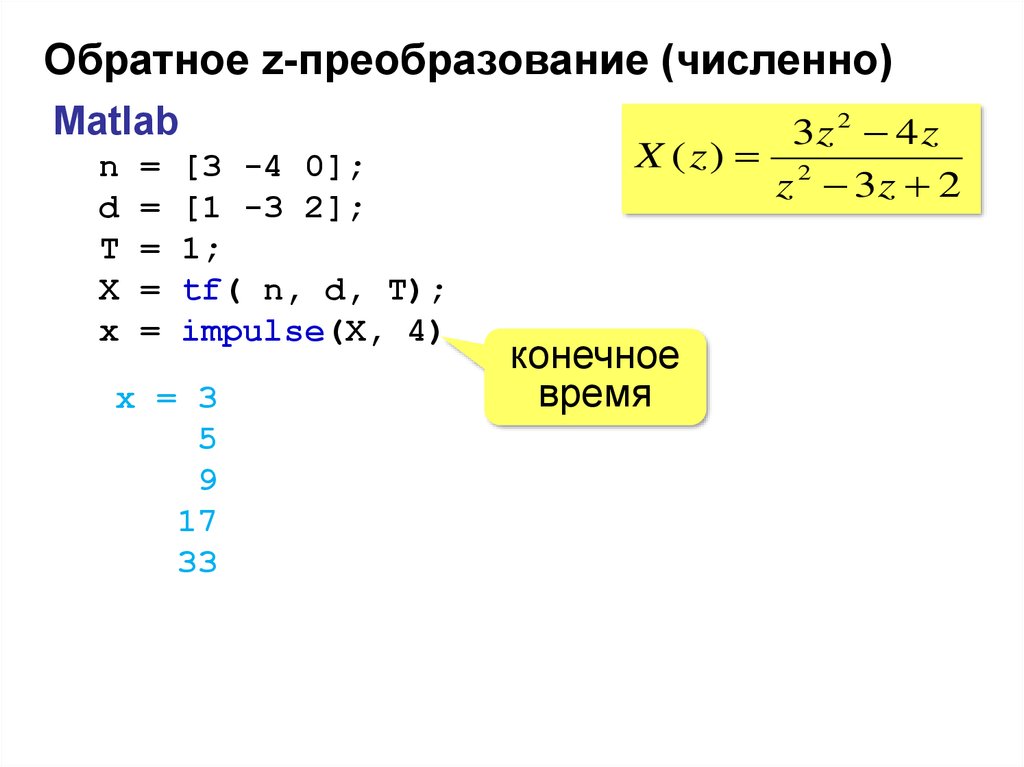
Обратное z-преобразование (численно)Matlab
n
d
T
X
x
=
=
=
=
=
[3 -4 0];
[1 -3 2];
1;
tf( n, d, T);
impulse(X, 4)
x = 3
5
9
17
33
3z 2 4 z
X ( z) 2
z 3z 2
конечное
время
17.
Обратное z-преобразование (формула!)Matlab
syms z
n = 3*z^2 - 4*z;
d = z^2 - 3*z + 2;
x = iztrans(n/d)
x =
2*2^n+1
3z 2 4 z
X ( z) 2
z 3z 2