













 electronics
electronicsSimilar presentations:






 самолета RRJ-95")



Вычислительная система самолетовождения RRJ-95
1. ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА САМОЛЕТОВОЖДЕНИЯ RRJ-95
Казанцев ЮрийСергеевич
АК3-221
2. СОДЕРЖАНИЕ
1. Общие сведения о ВСС1.1 Назначение и функции ВСС
1.2 Состав и размещение блоков ВСС
2. Принципы работы ВСС
2.1 Описание вычислителя и многофункционального пульта ВСС
2.2 Сопряженные системы ВСС
2.3 Описание функций навигации ВСС
2.4 Органы управления и индикации ВСС
3. Особенности технической эксплуатации
3.1 Порядок включения и выключения ВСС
3.2 Контроль работоспособности ВСС
3.3 Перечень регламентных работ по ВСС
3.4 Методика поиска и устранения неисправностей
3.5 Оформление бортового журнала
4. Контроль знаний
3. Назначение и функции ВСС
• 1.1 Назначение и функции ВССВычислительная система самолетовождения (далее по тексту ВСС) предназначена для решения
задач самолётовождения в соответствии с современными требованиями зональной навигации при
выполнении полётов по отечественным и международным трассам.
ВСС - это вычислительное устройство, предназначенное для выполнения навигации в
горизонтальной и вертикальной плоскостях за 2 n. mile до FAF на основе данных, полученных от
бортовых систем, управления бортовыми системами, проведения расчетов, необходимых для
решения задач навигации. Таким образом, ВСС служит основным средством для оказания помощи
лётчику в разработке плана полёта, навигации на маршруте и в зоне аэродрома, выполнения
полёта и управления воздушным судном.
4. ВСС выполняет следующие функции:
• – разработку плана полёта;• – навигацию;
• – прогнозирование траектории;
• – горизонтальную навигацию;
• – вертикальную навигацию;
• – настройку радиосвязного оборудования;
• – управление радиосредствами ATC/TCAS.
5. Основные задачи вычислительной системы самолётовождения:
— навигация в вертикальной плоскости• — навигация на основе данных от спутниковой
системы навигации GPS, самолётных
дальномеров
• DME, дальномеров и системы VOR/DME,
инерциальной навигационной системы IRS,
DR;
• — определение приоритета среди
используемых систем;
• — планирование полёта;
• — навигация в горизонтальной плоскости
(LNAV) на всех типах маршрутов,
соответствующих ARINC-424;
(VNAV) 2n.m до FAF вплоть до минимальной
абсолютной
высоты снижения MDA в зависимости от
барометрического давления по отношению к
уровню
моря (QNH);
— зональная навигация RNAV;
— использование баз данных;
— автоматическое управление бортовым
радиооборудованием;
— расчет времени и топлива, необходимого на
выполнение полёта или его этапа;
— сбор данных о собственных отказах и
отказах бортового оборудования.
— передача версий программного обеспечения
в БСТО
6. 1.2 СОСТАВ И РАЗМЕЩЕНИЕ БЛОКОВ ВСС
В состав вычислительной̆ системы самолетовождения входятследующие системы и компоненты:
− вычислитель и многофункциональный̆ пульт ВСС (MCDU)
(34-61- 01);
− соединитель загрузки данных (34-61-02).
Вычислительная система является дублированной̆ и
базируется на вычислителе CMA-9000, выполненном в виде
интегрального блока вместе с многофункциональным пультом.
Кроме указанного оборудования в работе системы участвуют
интерфейсы и шины данных бортовых систем, а также
программное обеспечение.
Многофункциональные пульты ВСС СМА-9000 размещены
на центральном пульте пилотов.
Размещение многофункциональных
пультов ВСС
7. Местоположение компонентов
8. 2. ПРИНЦИПЫ РАБОТЫ ВСС
2.1 ОПИСАНИЕ ВЫЧИСЛИТЕЛЯ И МНОГОФУНКЦИОНАЛЬНОГО ПУЛЬТА ВСС• В состав FMS входят два вычислителя системы
самолетовождения CMA-9000.
Вычислитель FMS представляет собой программируемый вычислитель в моноблочном
исполнении со встроенным многофункциональным пультом управления и индикации (MCDU).
Программно-математическое обеспечение записывается в перепрограммируемое
запоминающее устройство (ПЗУ) аттестованным сервисным центром по бюллетеню
разработчика. База навигационных данных записывается в ПЗУ авиакомпанией.
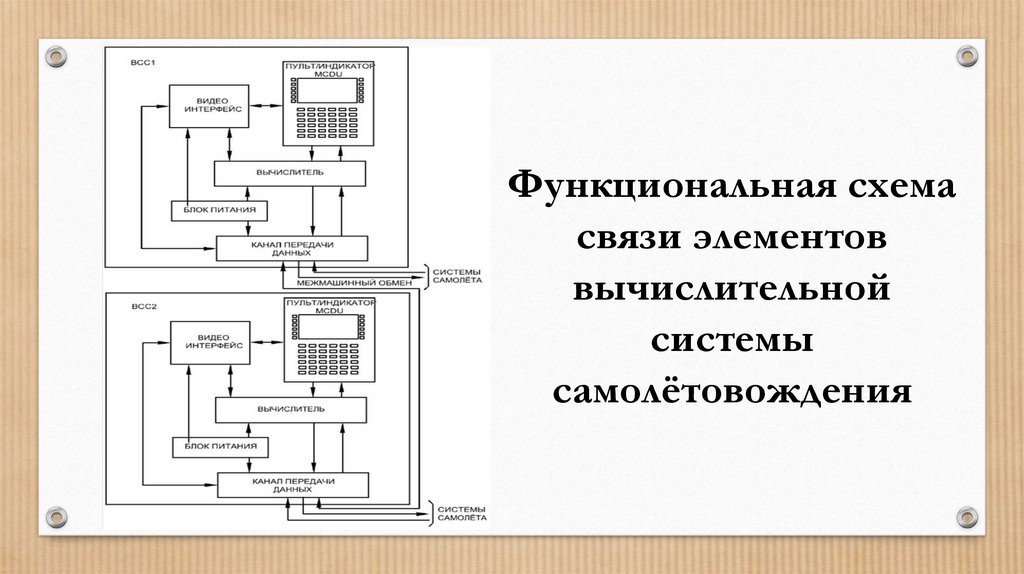
Вычислители FMS могут работать как в независимом, так и в синхронном режиме:
▪ при работе в синхронном режиме вычислители FMS осуществляют обмен результатами
навигационных вычислений;
▪ в независимом режиме каждый вычислитель FMS использует результаты собственных
навигационных вычислений и имеет доступ только к своим данным (например, план полёта).
Как правило, вычислители FMS функционируют в синхронном режиме, однако переходят в
независимый режим, если при работе двух CMA-9000 имеют место следующие условия:
▪ разные базы данных пользователя;
▪ разные версии программного обеспечения;
▪ разные навигационные базы данных;
▪ ошибка связи одной из CMA-9000 при выполнении соединения;
▪ различные фазы полёта более чем 5 секунд;
▪ различные навигационные режимы в течение более чем 10 секунд.
9.
Функциональная схемасвязи элементов
вычислительной
системы
самолётовождения
10.
Описание основных функций ВССВычислительная система самолётовождения выполняет следующие функции:
— планирование полёта,
— навигация,
— навигация в горизонтальной (LNAV) и вертикальной (VNAV) плоскостях,
— зональная навигация RNAV,
— управление радиотехническими средствами, TCAS,
— реализация интерфейса между экипажем и системами пилотажнонавигационного
оборудования посредством MCDU,
— сбор данных о собственных отказах и отказах взаимодействующего
оборудования.
Дополнительной функцией MCDU является предоставление экипажу калькулятора и
конвертера основных единиц измерения.
11.
ВСС имеет следующие базы данных:— навигационная база данных (NAV DB),
— специальная база данных (маршруты авиакомпании), (CO-ROUTE),
— база данных пользователя (USER ROUTS).
— база данных рабочих характеристик (PDB).
База данных пользователя может включать в себя: 400 различных планов полёта (маршруты
авиационных компаний) и до 4000 промежуточных пунктов маршрута. План полёта может
включать в себя не более 199 промежуточных пунктов маршрута. Это означает, что база данных
пользователя может включать в себя 40 планов полёта по 100 промежуточных пунктов маршрута в
каждом, или 400 планов полёта по 10 промежуточных пунктов маршрута в каждом, или 100 планов
полёта по 40 промежуточных пунктов маршрута в каждом, и т.д. База данных пользователя в
состоянии обрабатывать не более 1800 различных промежуточных пунктов маршрута. Таким
образом, планы полёта, хранящиеся в базе данных пользователя, могут включать в себя не более
4000 промежуточных пунктов маршрута, 1800 из которых отличаются один от другого. Все данные,
введенные в вычислитель ВСС передаются на другую вычислитель ВСС с использованием шины
синхронизации.
12.
Из навигационной базы данных ВСС извлекается следующаяинформация:
— информация о радионавигационных маяках ,
— информация о маршрутах (ППМ, пересечения, воздушные
трассы),
— информация об аэропортах (название, курс ВПП, высота ВПП
аэропорта над уровнем моря, процедуры SID и STAR).
Разработанный план полёта передаётся на CDS в виде карты в
соответствующем по масштабе (от 5 до 640 n. mile) и виде (ARC, ROSE или
PLAN).
13.
2.2 СОПРЯЖЕННЫЕ СИСТЕМЫ ВССДля определения местоположения воздушного судна ВСС
взаимодействует со следующими навигационными системами
самолёта:
— инерциальной навигационной системой IRS,
— глобальной навигационной системой GPS,
— радиодальномером DME.
— системой всенаправленного маяка VOR.
Кроме того, FMS связана через интерфейс с опционным приёмником ГЛОНАСС для передачи
консультативной информации на дисплей MCDU. Параметры, поступающие с приёмника ГЛОНАСС, для
навигации не используются.
14.
Для выполнения навигационной функции ВСС необходимы следующиепараметры,которые вычисляются или поступают непосредственно с
датчиков:
— текущее местоположение (PPOS),
— высота с учетом давления (QNH, STD),
— путевая скорость GS,
— путевой угол TK,
— текущий вектор ветра,
— расстояние бокового отклонения от курса (XTK),
— погрешность путевого угла (TKE),
— заданный курс (DTK),
— температура наружного воздуха (SAT),
— приборная и истинная скорости (CAS и TAS),
— вертикальная скорость,
— курс истинный и магнитный (HDG).
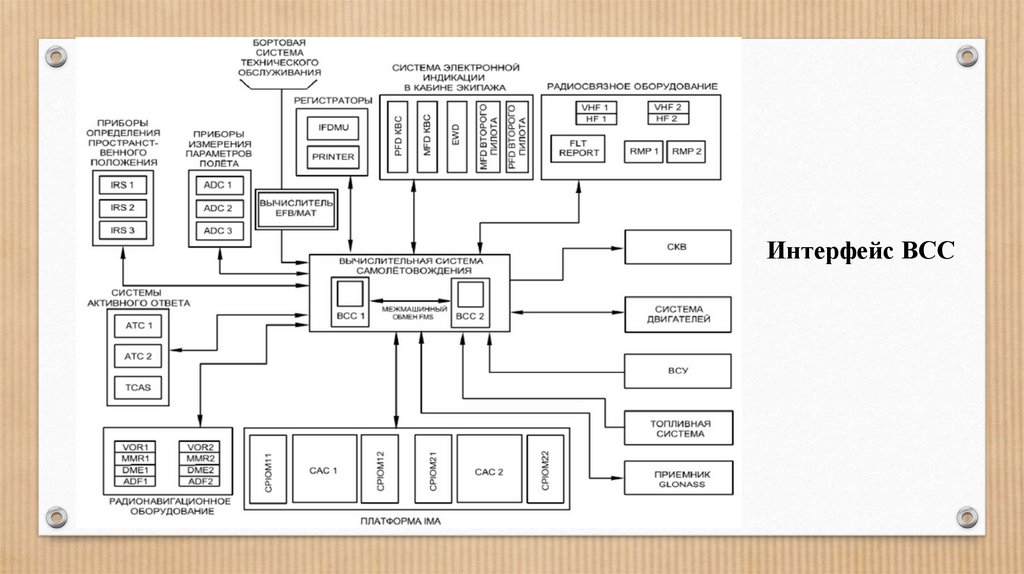
15.
Интерфейс ВСС16. 2.3 ОПИСАНИЕ ФУНКЦИЙ НАВИГАЦИИ ВСС
Навигация GPS: GPS определяет непосредственное местоположение самолёта, путевую скорость, путевой угол,скорость с Севера на Юг, скорость с Востока на Запад и вертикальную скорость. Для обеспечения полноты функции
автономного контроля целостности сигналов приемника (RAIM - receiver autonomous integrity monitoring) экипаж самолёта
может переключить режим GPS или другого недостоверного средства навигации.
Навигация DME/DME: FMS осуществляет расчёт местоположения самолёта с использованием третьего канала
приёмников DME. Если местоположение станций DME содержится в навигационной базе данных, FMS определяет
местоположение воздушного судна с помощью 3-х станций DME. Рассчитанное во времени изменение местоположения
позволяет рассчитать путевую скорость и путевой угол.
Навигация VOR/DME: FMS использует станцию VOR и связанную с ней DME для определения относительного курса
и расстояния до станции. FMS определяет местоположение воздушного судна на основании данной информации и учитывает
изменение местоположения во времени для определения путевой скорости и путевого угла.
Инерциальная навигация INERTIAL: FMS определяет средневзвешенное значение между тремя IRS. Если действует
навигационный режим GPS (DME/DME или VOR/DME), FMS осуществляет расчёт вектора погрешности местоположения
между местоположением, рассчитанным с помощью IRS, и текущим местоположением.
При инерциальной навигации FMS корректирует местоположение в своей памяти на основании последнего расчёта
вектора сдвига для того, чтобы обеспечить плавный переход из режима GPS (DME/DME или VOR/DME) в инерционный
навигационный режим. В случае отказа инерциального вычислителя FMS осуществляет расчёт сдвоенного смешанного
местоположения между двумя оставшимися датчиками IRS. При отказе второго инерциального вычислителя FMS использует
оставшийся инерциальный вычислитель для расчета местоположения.
Навигация методом счисления пути DR: FMS использует для расчёта местоположения самолета последние
определённые данные о местоположении, TAS (истинную скорость самолёта), поступающую с ADC, введённый курс и
прогноз ветровой обстановки. Экипаж самолёта может вводить в ручном режиме данные о текущем местоположении, путевой
угол, путевую скорость, скорость и направление ветра.
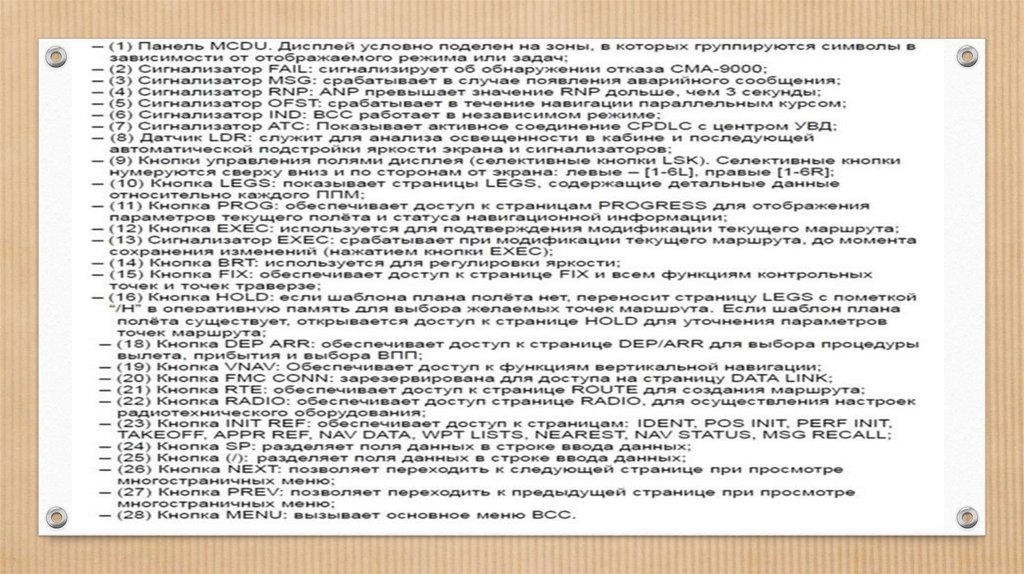
17. 2.4 ОРГАНЫ УПРАВЛЕНИЯ И ИНДИКАЦИИ ВСС
18.
19.
20.
2.4 ОРГАНЫ УПРАВЛЕНИЯ И ИНДИКАЦИИ ВСС21. 3.1 ПОРЯДОК ВКЛЮЧЕНИЯ И ВЫКЛЮЧЕНИЯ СИСТЕМЫ
3. ОСОБЕННОСТИ ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ3.1 ПОРЯДОК ВКЛЮЧЕНИЯ И ВЫКЛЮЧЕНИЯ СИСТЕМЫ
• Система включается в работу автоматически при постановке
самолета под ток, однако необходимо выполнить следующие
подготовительные работы: для включения ВСС1 необходимо
включить автомат защиты сети FMS1 на DB 28V №2, а для
включения ВСС2 необходимо включить канал LMU 3-15 блока
выключателей предохранителей.
• Для выключения необходимо выполнить обратные действия.
Расположение АЗС FMS1
22.
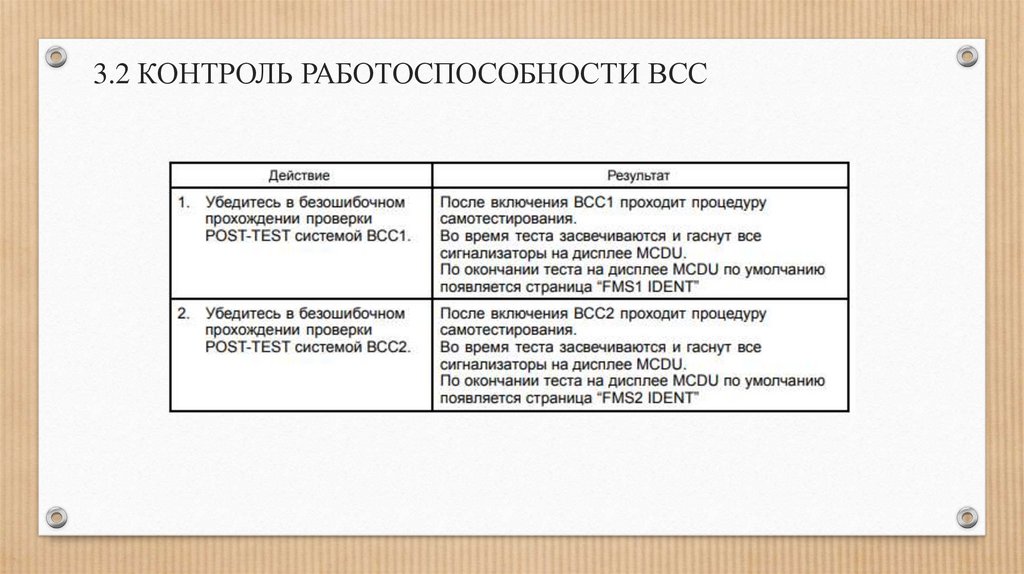
3.2 КОНТРОЛЬ РАБОТОСПОСОБНОСТИ ВСС23.
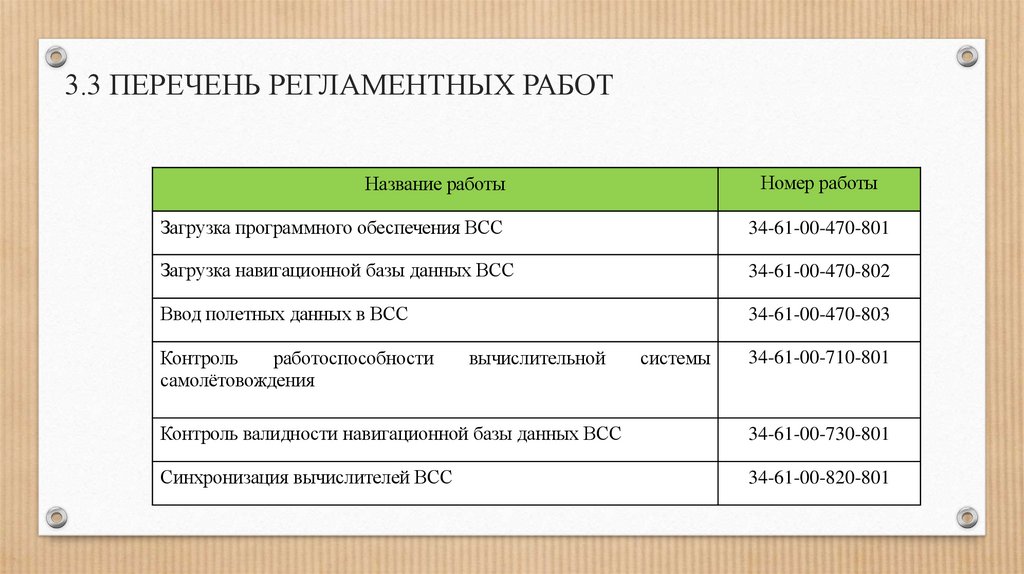
3.3 ПЕРЕЧЕНЬ РЕГЛАМЕНТНЫХ РАБОТНазвание работы
Номер работы
Загрузка программного обеспечения ВСС
34-61-00-470-801
Загрузка навигационной базы данных ВСС
34-61-00-470-802
Ввод полетных данных в ВСС
34-61-00-470-803
Контроль
работоспособности
самолётовождения
вычислительной
системы
34-61-00-710-801
Контроль валидности навигационной базы данных ВСС
34-61-00-730-801
Синхронизация вычислителей ВСС
34-61-00-820-801
24.
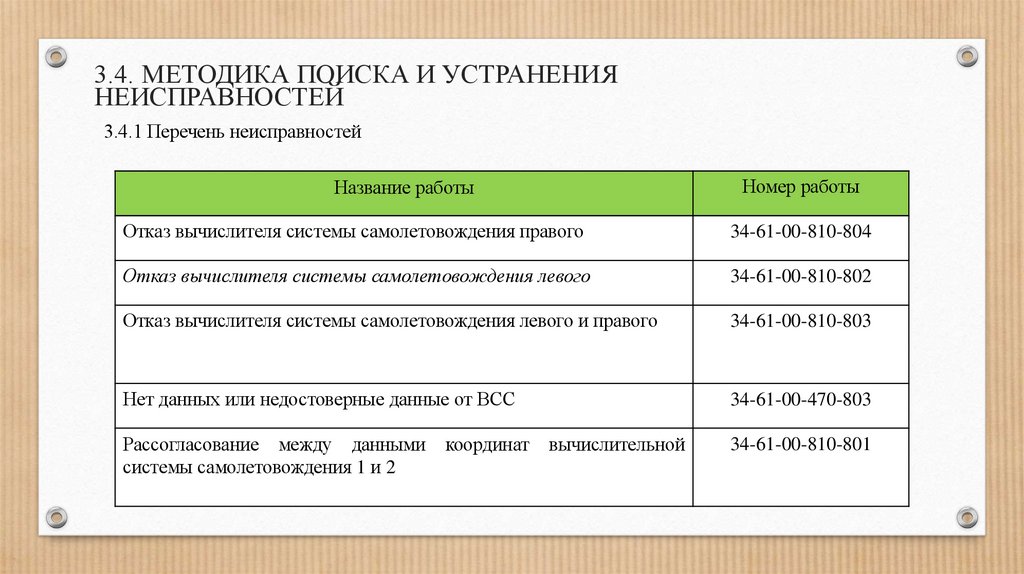
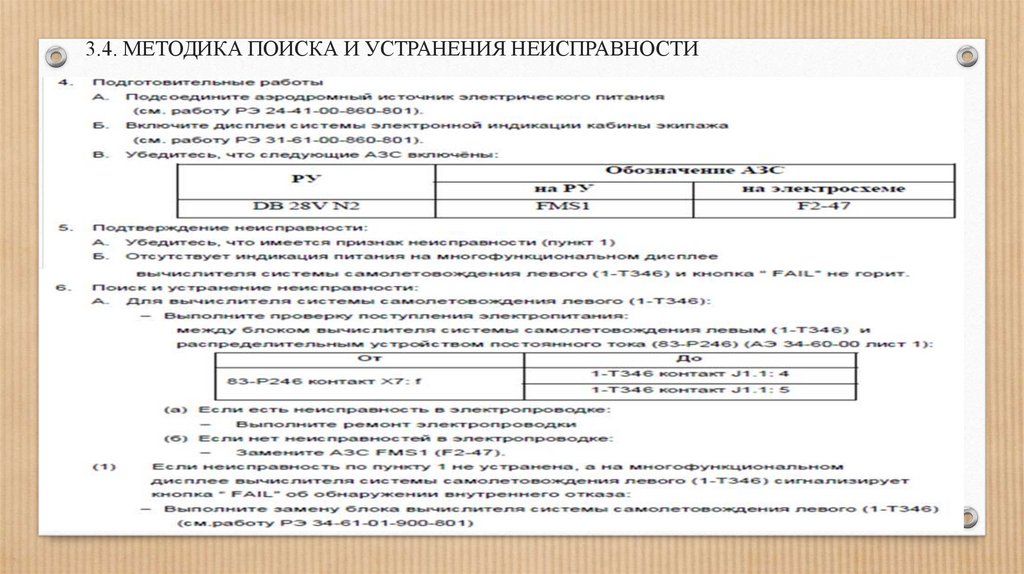
3.4. МЕТОДИКА ПОИСКА И УСТРАНЕНИЯНЕИСПРАВНОСТЕЙ
3.4.1 Перечень неисправностей
Номер работы
Название работы
Отказ вычислителя системы самолетовождения правого
34-61-00-810-804
Отказ вычислителя системы самолетовождения левого
34-61-00-810-802
Отказ вычислителя системы самолетовождения левого и правого
34-61-00-810-803
Нет данных или недостоверные данные от ВСС
34-61-00-470-803
Рассогласование между данными
системы самолетовождения 1 и 2
координат
вычислительной
34-61-00-810-801
25.
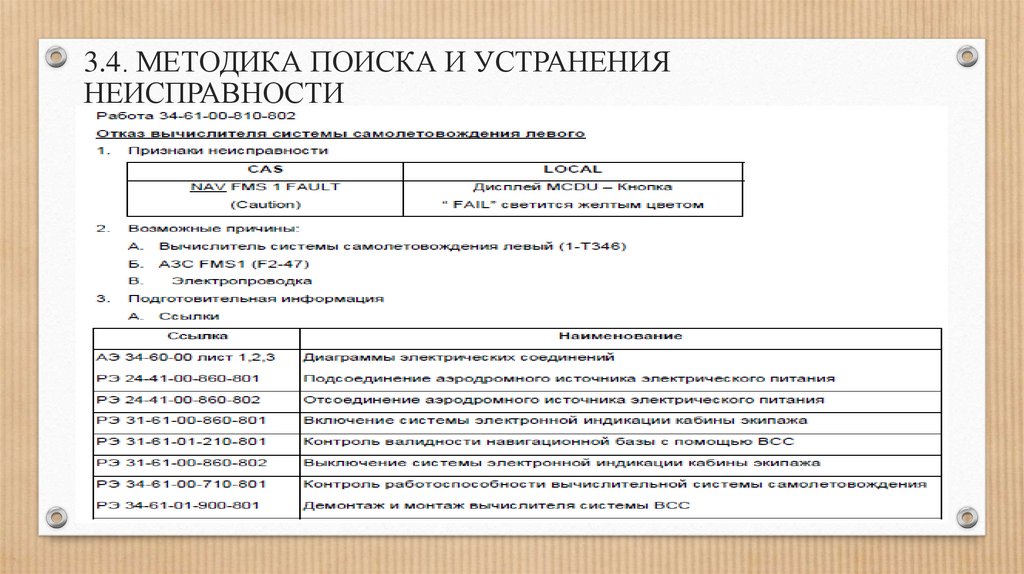
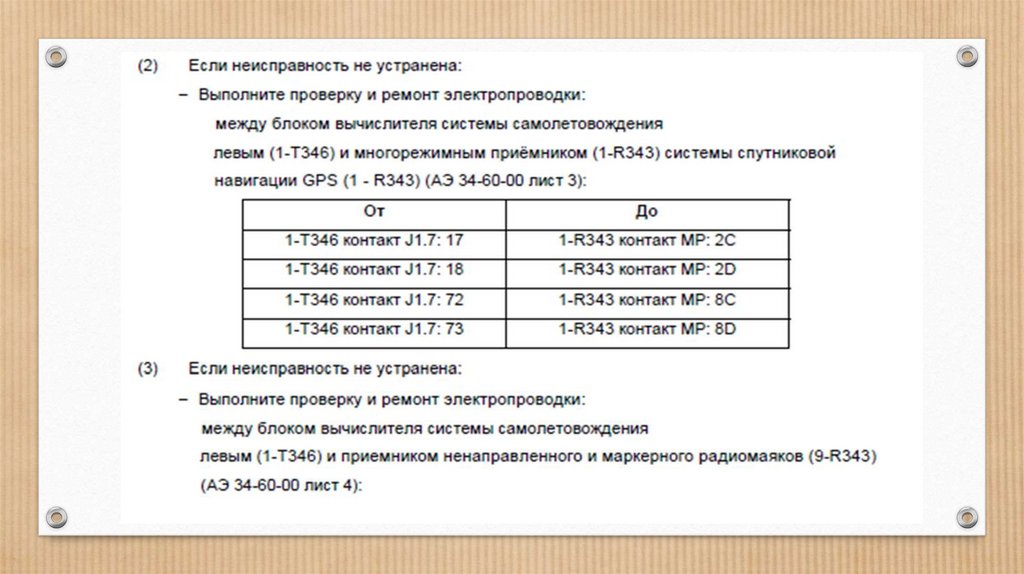
3.4. МЕТОДИКА ПОИСКА И УСТРАНЕНИЯНЕИСПРАВНОСТИ
26.
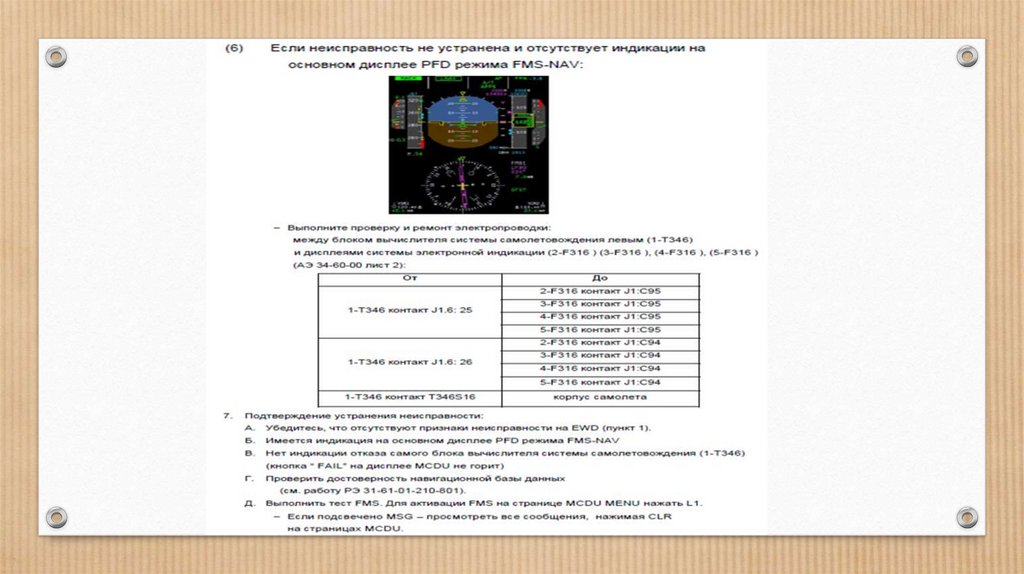
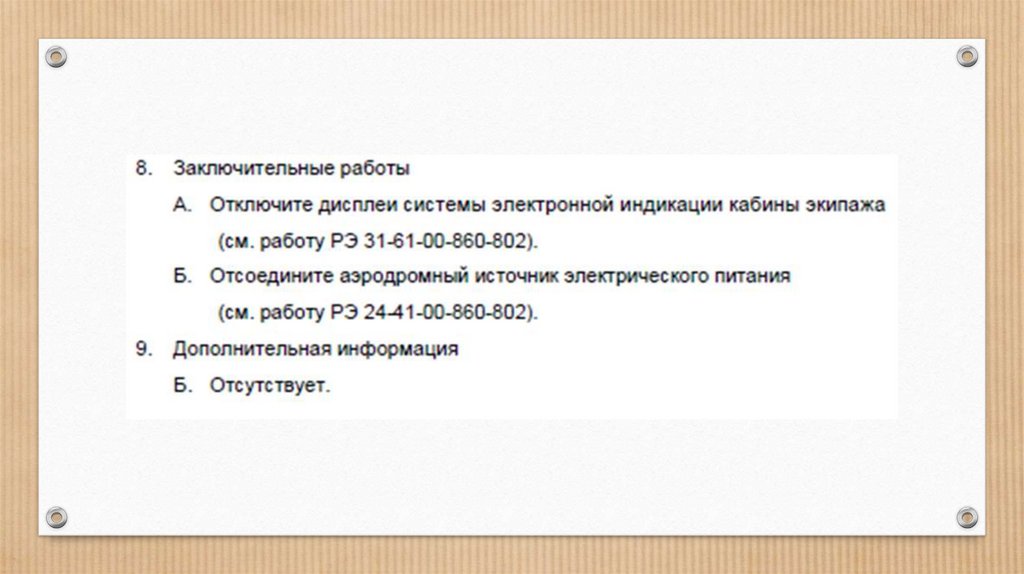
3.4. МЕТОДИКА ПОИСКА И УСТРАНЕНИЯ НЕИСПРАВНОСТИ27.
28.
29.
30.
31.
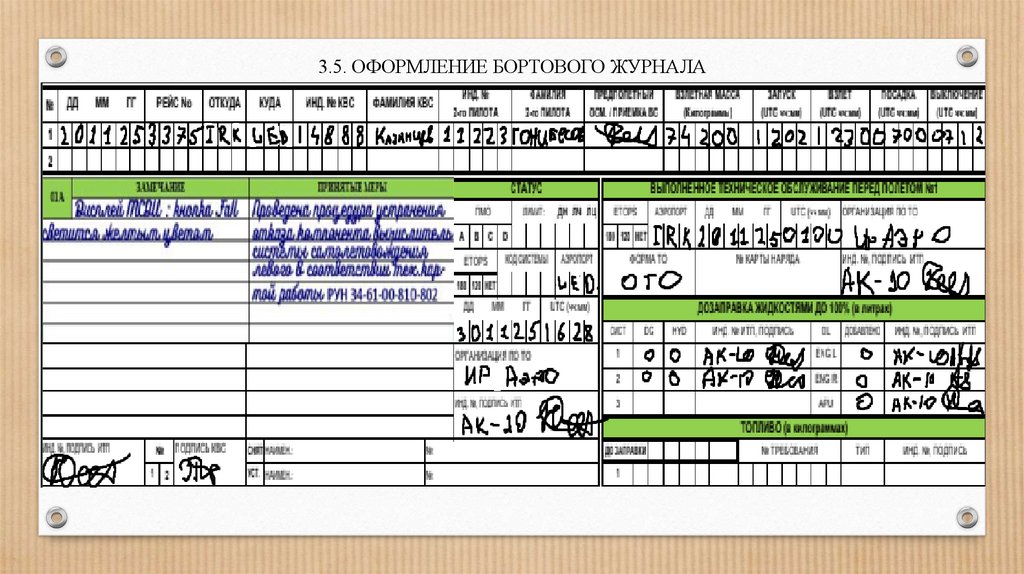
3.5. ОФОРМЛЕНИЕ БОРТОВОГО ЖУРНАЛА32.
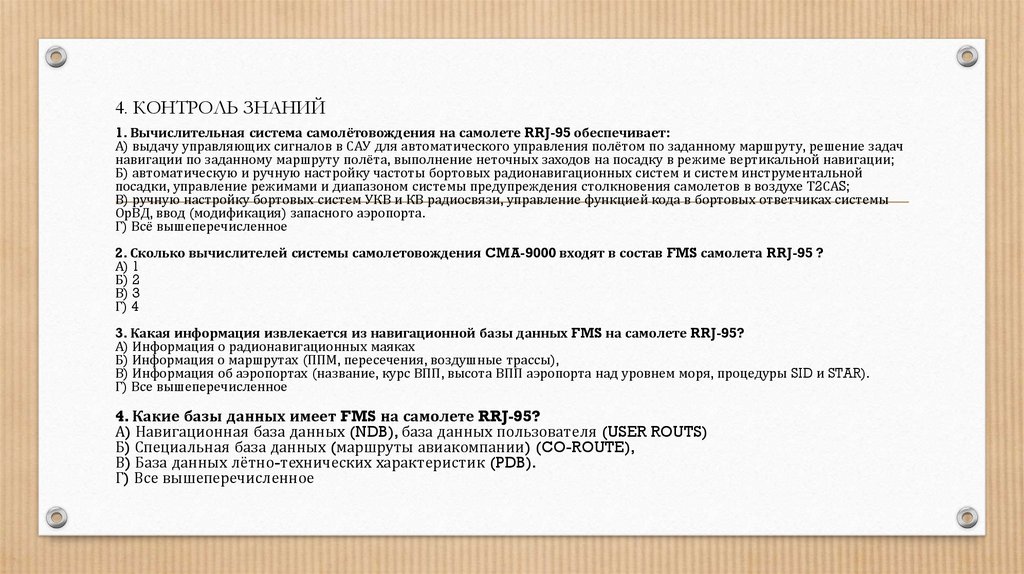
4. КОНТРОЛЬ ЗНАНИЙ1. Вычислительная система самолётовождения на самолете RRJ-95 обеспечивает:
А) выдачу управляющих сигналов в САУ для автоматического управления полётом по заданному маршруту, решение задач
навигации по заданному маршруту полёта, выполнение неточных заходов на посадку в режиме вертикальной навигации;
Б) автоматическую и ручную настройку частоты бортовых радионавигационных систем и систем инструментальной
посадки, управление режимами и диапазоном системы предупреждения столкновения самолетов в воздухе Т2САS;
В) ручную настройку бортовых систем УКВ и КВ радиосвязи, управление функцией кода в бортовых ответчиках системы
ОрВД, ввод (модификация) запасного аэропорта.
Г) Всё вышеперечисленное
2. Сколько вычислителей системы самолетовождения CMA-9000 входят в состав FMS самолета RRJ-95 ?
А) 1
Б) 2
В) 3
Г) 4
3. Какая информация извлекается из навигационной базы данных FMS на самолете RRJ-95?
А) Информация о радионавигационных маяках
Б) Информация о маршрутах (ППМ, пересечения, воздушные трассы),
В) Информация об аэропортах (название, курс ВПП, высота ВПП аэропорта над уровнем моря, процедуры SID и STAR).
Г) Все вышеперечисленное
4. Какие базы данных имеет FMS на самолете RRJ-95?
А) Навигационная база данных (NDB), база данных пользователя (USER ROUTS)
Б) Специальная база данных (маршруты авиакомпании) (CO-ROUTE),
В) База данных лётно-технических характеристик (PDB).
Г) Все вышеперечисленное
33.
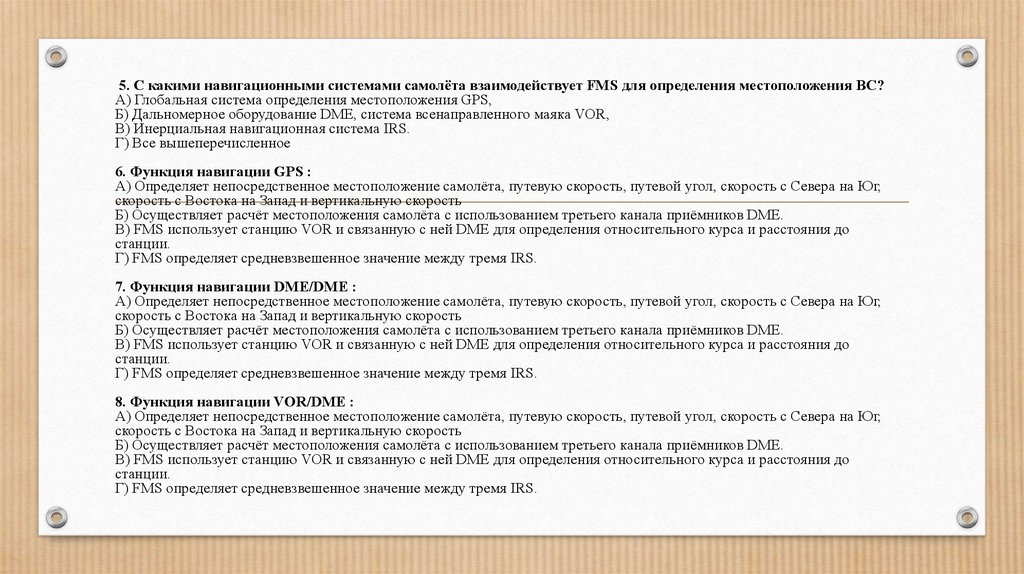
5. С какими навигационными системами самолёта взаимодействует FMS для определения местоположения ВС?А) Глобальная система определения местоположения GPS,
Б) Дальномерное оборудование DME, система всенаправленного маяка VOR,
В) Инерциальная навигационная система IRS.
Г) Все вышеперечисленное
6. Функция навигации GPS :
А) Определяет непосредственное местоположение самолёта, путевую скорость, путевой угол, скорость с Севера на Юг,
скорость с Востока на Запад и вертикальную скорость
Б) Осуществляет расчёт местоположения самолёта с использованием третьего канала приёмников DME.
В) FMS использует станцию VOR и связанную с ней DME для определения относительного курса и расстояния до
станции.
Г) FMS определяет средневзвешенное значение между тремя IRS.
7. Функция навигации DME/DME :
А) Определяет непосредственное местоположение самолёта, путевую скорость, путевой угол, скорость с Севера на Юг,
скорость с Востока на Запад и вертикальную скорость
Б) Осуществляет расчёт местоположения самолёта с использованием третьего канала приёмников DME.
В) FMS использует станцию VOR и связанную с ней DME для определения относительного курса и расстояния до
станции.
Г) FMS определяет средневзвешенное значение между тремя IRS.
8. Функция навигации VOR/DME :
А) Определяет непосредственное местоположение самолёта, путевую скорость, путевой угол, скорость с Севера на Юг,
скорость с Востока на Запад и вертикальную скорость
Б) Осуществляет расчёт местоположения самолёта с использованием третьего канала приёмников DME.
В) FMS использует станцию VOR и связанную с ней DME для определения относительного курса и расстояния до
станции.
Г) FMS определяет средневзвешенное значение между тремя IRS.
34.
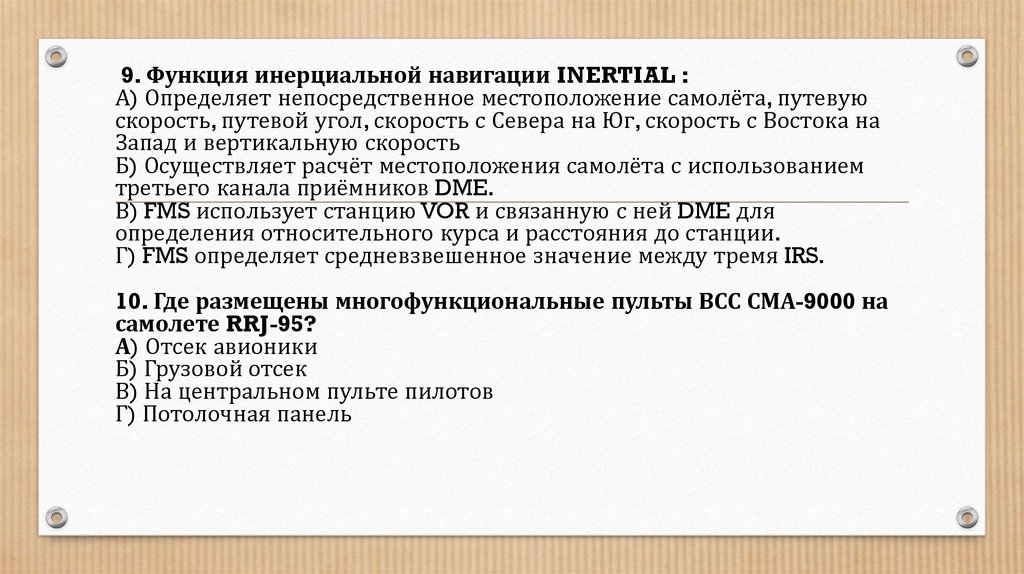
9. Функция инерциальной навигации INERTIAL :А) Определяет непосредственное местоположение самолёта, путевую
скорость, путевой угол, скорость с Севера на Юг, скорость с Востока на
Запад и вертикальную скорость
Б) Осуществляет расчёт местоположения самолёта с использованием
третьего канала приёмников DME.
В) FMS использует станцию VOR и связанную с ней DME для
определения относительного курса и расстояния до станции.
Г) FMS определяет средневзвешенное значение между тремя IRS.
10. Где размещены многофункциональные пульты ВСС СМА-9000 на
самолете RRJ-95?
А) Отсек авионики
Б) Грузовой отсек
В) На центральном пульте пилотов
Г) Потолочная панель