







 mechanics
mechanicsSimilar presentations:










Електропневматичні системи керування. Пневмогідравліка
1. Електропневматичні системи керування Пневмогідравліка
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Електропневматичні системи керування
Пневмогідравліка
Перелік питань
1. Електропневматичні системи керування
2. Електропневматичні елементи
3. Пневмоелектричний перетворювач
4. Пневмогідравлічні приводи
5. Приводи подачі
6. Пневмогідравлічні перетворювачі
7. Пневмогідравлічні підсилювачі тиску.
Основи мехатроніки
2.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Електропневматичні системи керування
Електропневматичні системи керування
застосовуються в машинах і пристроях з
пневматичними приводами та електричним
керуванням.
Керувальна електрична частина отримує сигнали з
елементів управління (кнопки, перемикачі,
сенсори). Керувальні елементи (реле,
контактори) перетворюють вхідні сигнали
(реалізують логічні функції, затримують,
підсилюють) і створюють сигнали, які, діючи на
електрично керовані пневматичні розподільні
вентилі, приводять їх в рух.
В силовій пневматичній частині робочі вентилі
(керовані електромагнітами розподільні вентилі
3/2, 4/2 або 5/2) керують рушіями і двигунами,
які приводять в рух механізми машин та
установок.
На схемах електропневматичних систем
пневматична силова та електрична керувальна
частини показуються окремо.
Основи мехатроніки
3.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
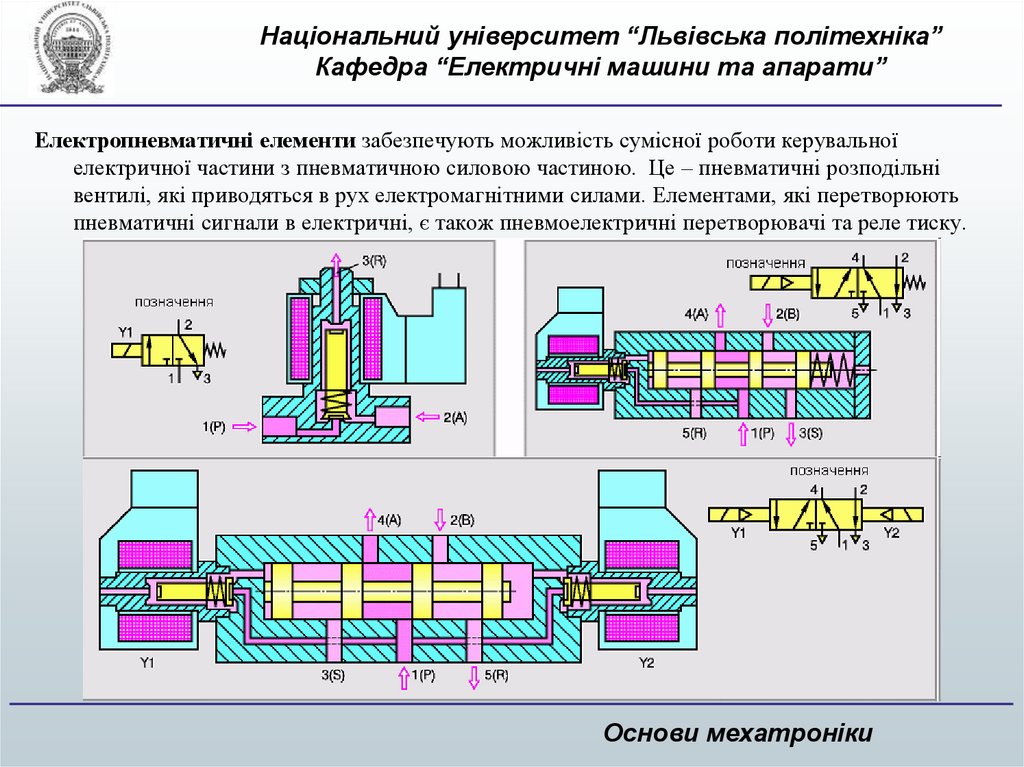
Електропневматичні елементи забезпечують можливість сумісної роботи керувальної
електричної частини з пневматичною силовою частиною. Це – пневматичні розподільні
вентилі, які приводяться в рух електромагнітними силами. Елементами, які перетворюють
пневматичні сигнали в електричні, є також пневмоелектричні перетворювачі та реле тиску.
Основи мехатроніки
4.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
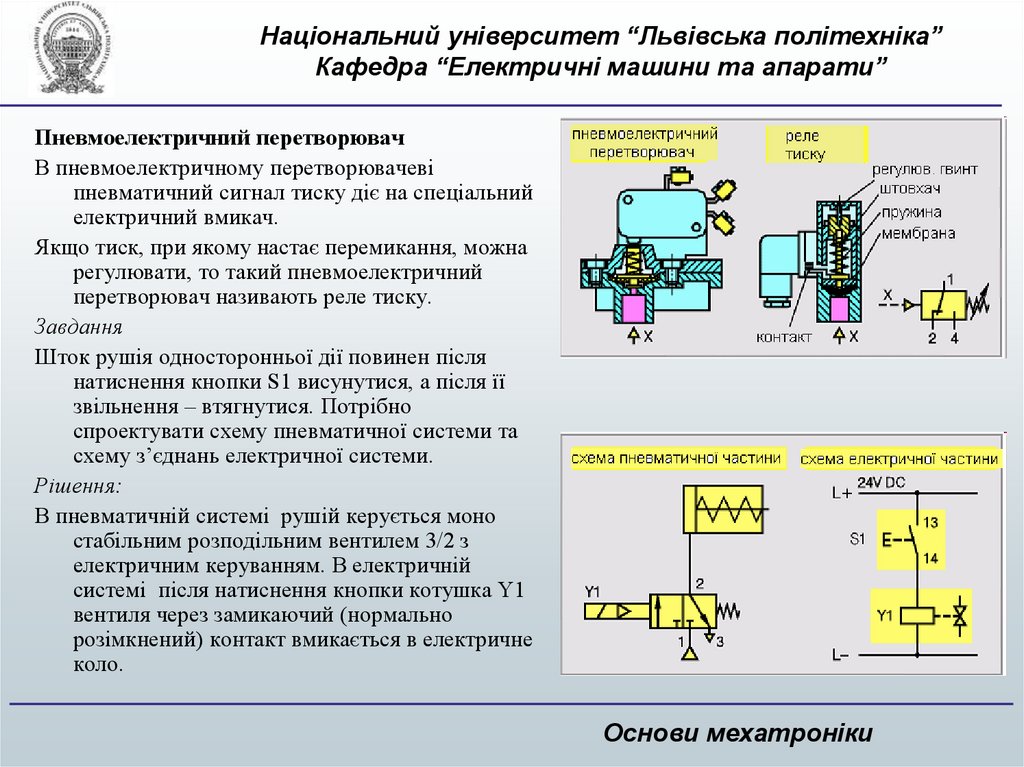
Пневмоелектричний перетворювач
В пневмоелектричному перетворювачеві
пневматичний сигнал тиску діє на спеціальний
електричний вмикач.
Якщо тиск, при якому настає перемикання, можна
регулювати, то такий пневмоелектричний
перетворювач називають реле тиску.
Завдання
Шток рушія односторонньої дії повинен після
натиснення кнопки S1 висунутися, а після її
звільнення – втягнутися. Потрібно
спроектувати схему пневматичної системи та
схему з’єднань електричної системи.
Рішення:
В пневматичній системі рушій керується моно
стабільним розподільним вентилем 3/2 з
електричним керуванням. В електричній
системі після натиснення кнопки котушка Y1
вентиля через замикаючий (нормально
розімкнений) контакт вмикається в електричне
коло.
Основи мехатроніки
5.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
В системі з непрямим керуванням після
натиснення кнопки S1 електричне коло у
вітці 1 з котушкою реле K1 замикається.
У гілці 2 замикається нормально
розімкнений контакт реле K1, замикаючи
коло живлення котушки електромагніту
Y1; вентиль вмикається (система 1 на
рис.).
Якщо рушій має залишитися висунутим до
моменту появи сигналу на втягування, то
замість кнопки S1 можна використати
бістабільний (на два положення)
перемикач SO, який після першого руху
замикає коло котушки, а після другого –
розмикає (система 2 на рис.).
Основи мехатроніки
6.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Система з самоутриманням
В системі з самоутриманням команда на рух
рушія вперед може бути створена
короткочасним натисненням кнопки.
Цей стан буде утримуватися
(запам’ятається) доти, доки його не
вимкне вимикальний сигнал.
В приведеній системі кнопка S1 замикає
коло котушки реле K1. Замикаючий
контакт реле K1, увімкнений паралельно
з контактом S1, підтримує струм в
котушці так довго, поки розмикаючий
контакт кнопки S2 не розірве електричне
коло само утримання; тоді рушій
втягнеться.
Основи мехатроніки
7.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Таблиця контактів реле
Завдання. За допомогою рушія
двосторонньої дії потрібно подавати
деталі зі штабеля до кріпильного
пристрою. Після короткочасного
натиснення кнопки S1 шток рушія
висувається. В кінцевому положенні він
приводить в рух кінцевий вимикач і
втягується. Система керування
процесом подавання деталей показана у
вигляді схеми пневматичної частини та
схеми електричної частини.
Схему електричної частини можна також
представити у вигляді, коли окремі кола
намальовані вертикально.
Основи мехатроніки
8.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
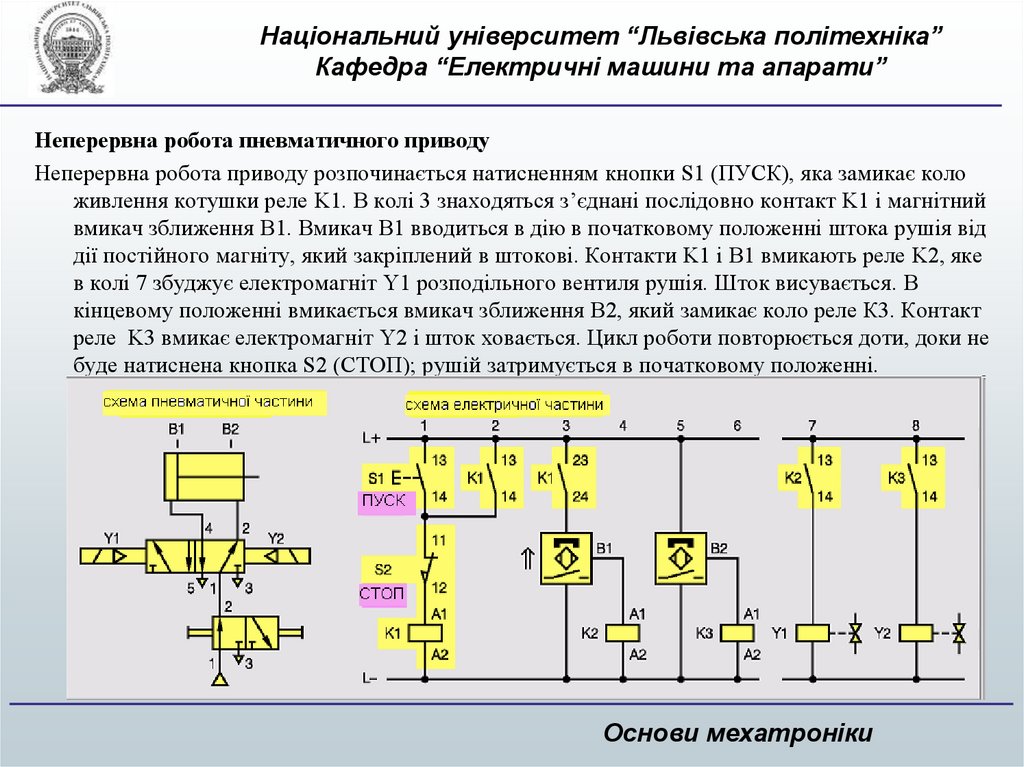
Неперервна робота пневматичного приводу
Неперервна робота приводу розпочинається натисненням кнопки S1 (ПУСК), яка замикає коло
живлення котушки реле K1. В колі 3 знаходяться з’єднані послідовно контакт K1 i магнітний
вмикач зближення B1. Вмикач B1 вводиться в дію в початковому положенні штока рушія від
дії постійного магніту, який закріплений в штокові. Контакти K1 i B1 вмикають реле K2, яке
в колі 7 збуджує електромагніт Y1 розподільного вентиля рушія. Шток висувається. В
кінцевому положенні вмикається вмикач зближення B2, який замикає коло реле К3. Контакт
реле K3 вмикає електромагніт Y2 i шток ховається. Цикл роботи повторюється доти, доки не
буде натиснена кнопка S2 (СТОП); рушій затримується в початковому положенні.
Основи мехатроніки
9.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
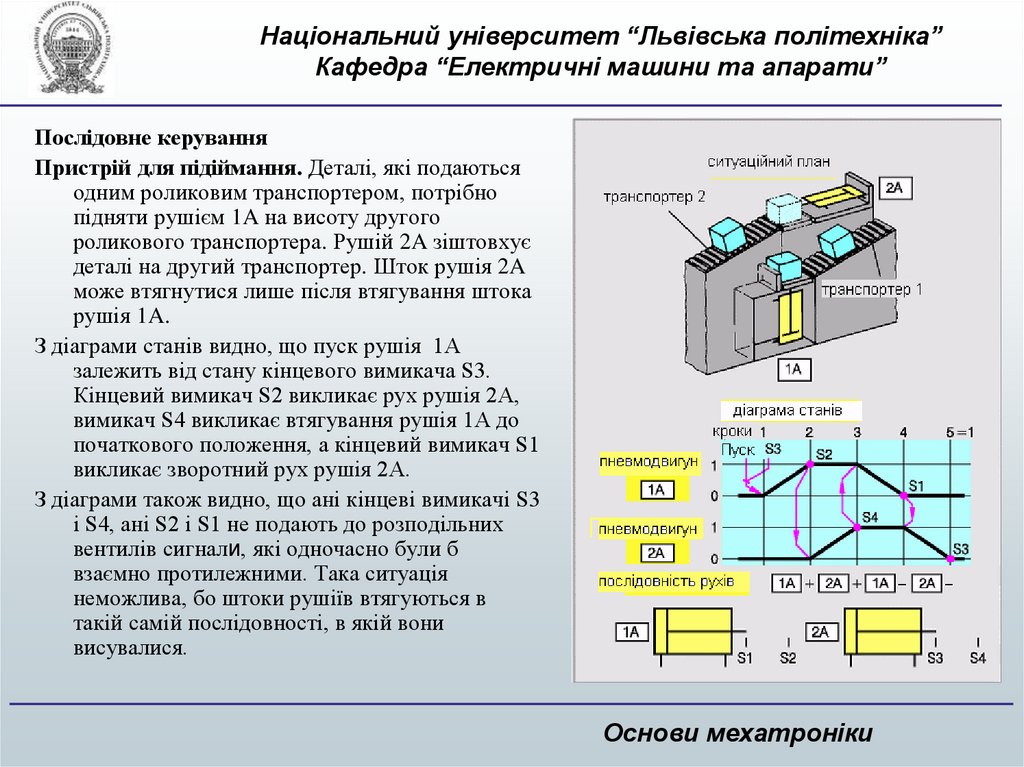
Послідовне керування
Пристрій для підіймання. Деталі, які подаються
одним роликовим транспортером, потрібно
підняти рушієм 1A на висоту другого
роликового транспортера. Рушій 2A зіштовхує
деталі на другий транспортер. Шток рушія 2A
може втягнутися лише після втягування штока
рушія 1A.
З діаграми станів видно, що пуск рушія 1A
залежить від стану кінцевого вимикача S3.
Кінцевий вимикач S2 викликає рух рушія 2A,
вимикач S4 викликає втягування рушія 1A до
початкового положення, а кінцевий вимикач S1
викликає зворотний рух рушія 2A.
З діаграми також видно, що ані кінцеві вимикачі S3
i S4, ані S2 i S1 не подають до розподільних
вентилів сигнали, які одночасно були б
взаємно протилежними. Така ситуація
неможлива, бо штоки рушіїв втягуються в
такій самій послідовності, в якій вони
висувалися.
Основи мехатроніки
10.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
На схемі пневматичної частини системи кожним рушієм
керує розподільний вентиль 5/2 з двостороннім
електричним непрямим керуванням. На схемі
електричної частини електромагніти Y1 ...Y4
розподільних вентилів мають непряме керування, за
допомогою реле K1... K4. Після натиснення кнопки
“ПУСК” – контакт SO, система забезпечує робочий
цикл.
Основи мехатроніки
11.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
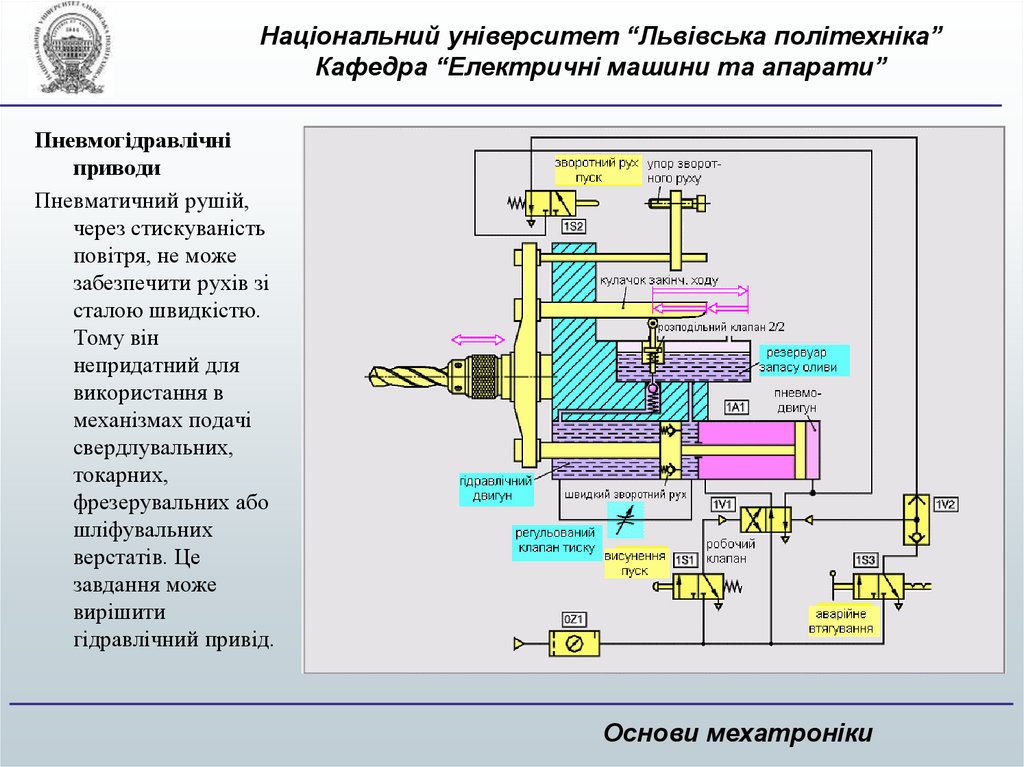
Пневмогідравлічні
приводи
Пневматичний рушій,
через стискуваність
повітря, не може
забезпечити рухів зі
сталою швидкістю.
Тому він
непридатний для
використання в
механізмах подачі
свердлувальних,
токарних,
фрезерувальних або
шліфувальних
верстатів. Це
завдання може
вирішити
гідравлічний привід.
Основи мехатроніки
12.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
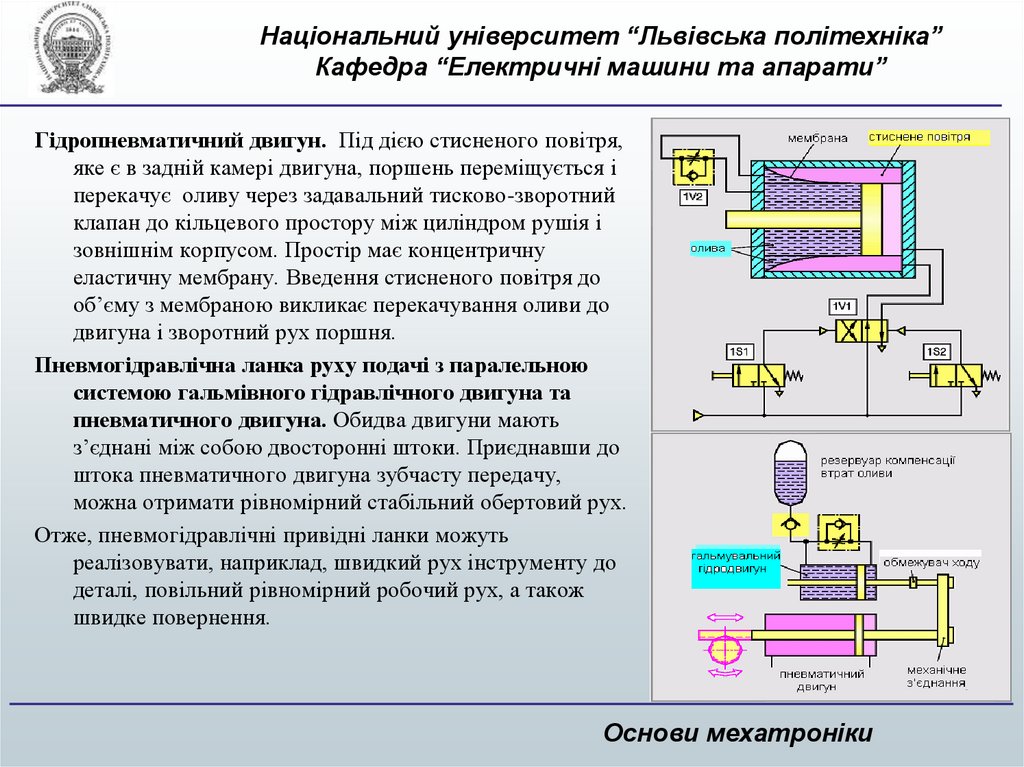
Гідропневматичний двигун. Під дією стисненого повітря,
яке є в задній камері двигуна, поршень переміщується і
перекачує оливу через задавальний тисково-зворотний
клапан до кільцевого простору між циліндром рушія і
зовнішнім корпусом. Простір має концентричну
еластичну мембрану. Введення стисненого повітря до
об’єму з мембраною викликає перекачування оливи до
двигуна і зворотний рух поршня.
Пневмогідравлічна ланка руху подачі з паралельною
системою гальмівного гідравлічного двигуна та
пневматичного двигуна. Обидва двигуни мають
з’єднані між собою двосторонні штоки. Приєднавши до
штока пневматичного двигуна зубчасту передачу,
можна отримати рівномірний стабільний обертовий рух.
Отже, пневмогідравлічні привідні ланки можуть
реалізовувати, наприклад, швидкий рух інструменту до
деталі, повільний рівномірний робочий рух, а також
швидке повернення.
Основи мехатроніки
13.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Пневмогідравлічні перетворювачі
Пневмогідравлічні перетворювачі це резервуари
оливи, наповнені оливою приблизно до 2/3 від
об’єму, в яких стиснене повітря тисне або
безпосередньо на поверхню оливи, або на
пливучий поршень.
Олива випливає з перетворювача через задавальний
натискний клапан до двигуна і викликає рух
штока зі сталою швидкістю. Зворотний рух
відбувається або під дією повітря, введеного на
другий бік поршня, або від дії оливи з другого
перетворювача.
Пневмогідравлічні підсилювачі тиску
Пневмогідравлічний підсилювач тиску це послідовно
з’єднані (тандем) пневмодвигун з більшою
поверхнею поршня A1 i гідродвигун з меншою
поверхнею поршня A2. В гідравлічній частині
отримується збільшення величини тиску,
порівняно з пневматичною, у співвідношенні A2 :
A1.
Основи мехатроніки
14. Лекцію завершено. Дякую за увагу !
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Лекцію завершено.
Дякую за увагу !
Які будуть запитання ?
Тема наступної лекції:
Гідравлічне керування
Основи мехатроніки