






 mechanics
mechanicsSimilar presentations:










Вступ до мехатроніки. Керування, регулювання та управління
1. Вступ до мехатроніки Керування, регулювання та управління
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Вступ до мехатроніки
Керування, регулювання та управління
Перелік питань
1. Предмет вивчення в курсі
"Мехатроніка"
2. Керування аналогове, бінарне та
цифрове
3. Комбінаційне та секвенційне
керування
4. Постійнозапрограмоване і
програмувальне керування
5. Регулювання
Основи мехатроніки
6. Управління
2.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Згідно визначення Міжнародної Федерації Теорії Машин і Механізмів
мехатроніка – це комбінація механіки, електронного керування і системного
мислення під час проектування виробів і виробничих процесів.
Само слово мехатроніка складається з двох слів: механіка і електроніка.
На практиці це означає, що головними керованими або регульованими
величинами мехатронної системи можуть бути:
положення, швидкість і прискорення під час лінійного чи обертального
переміщення;
сила і обертальний момент, які пов’язані з реалізацією переміщення або є їхнім
наслідком;
тиск і приплив рідини або газу;
частота механічних, а також акустичних і оптичних коливань;
температура і тепловий обмін;
рух шарів рідини і газу під впливом зовнішніх чинників;
електричний струм, який викликає рух механічних елементів в магнітному полі,
або механічні чи електромеханічні величини, які пов’язані з загальним
розумінням руху, сили або моменту.
Основи мехатроніки
3.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Перший раз терміном «мехатронічний» названо пристрій керування
електричним мотором, який створений в 1971 р. в японській фірмі Yaskawa
Electric Corporation і ця назва охоронялась торговим знаком аж до 1982 р.
В європейських вищих навчальних закладах підготовку інженерів-мехатроніків
розпочато вже в другій половині 90-их років.
Вироби української промисловості витримають конкуренцію в рамках об’єднаної
Європи тільки тоді, коли виконаються вимоги мехатроніки – корисного для
кінцевого продукту поєднання механічних, електротехнічних, електронних і
інформаційних властивостей.
Вже звичайні мехатронні продукти щораз тісніше оточують нас не тільки у
виробничій сфері, але також і в приватному житті: починаючи від
медіальної, комп’ютерної і побутової сфери і закінчуючи сучасними медичної
інженерії, оброблювальної, робототехнічної і транспортної сферами.
Мехатроніка - нова, що динамічно розвивається царина науки, техніки і
промисловості, вимагає щораз більше фахово підготовлених до опанування
визнань сучасності спеціалістів.
Основи мехатроніки
4.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Отже мехатроніка – це об’єднувальна комбінація механіки, електронного
керування і системного мислення при проектуванні і процесі виробництва.
В даному навчальному предметі будуть розглядатись основні відомості з цієї
нової науково-технічної дисципліни, з особливою увагою до найбільш
істотної її частини – керування й регулювання процесами виробництва,
сенсорики, приводів виконавчих пристроїв і робототехніки, інформатики і
керування процесом виробництва і його якості.
Подано в ньому технологію, класифікацію, а також засади будови основних
пристроїв автоматики, робототехніки і їх поєднань.
Вивчається, передусім, аспект практичного застосування мехатроніки,
різноманітне вирішення згаданих пристроїв: від механічних через
пневматичні до електронних – найновіших, процесорної генерації.
Доповненням основних відомостей з галузі будови загальних видів пристроїв є
перегляди типових вирішень з прикладами і ефектами застосувань.
Звернено також увагу на тенденцію розвитку цієї області.
Основи мехатроніки
5.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Керування, регулювання та управління.
Для того щоб машини і установки могли самостійно, тобто автоматично
працювати, вони обладнуються пристроями для керування, регулювання та
управління.
Такі пристрої реалізуються за використання механічних, електричних,
пневматичних і гідравлічних привідних і керувальних елементів.
Складними виробничими комплексами і виробничими лініями керують при
допомозі комп'ютерів. У конструкції навіть найменших пристроїв керування
тепер використовуються процесори і мікрокомп'ютери.
Керуванням називається процес цілеспрямованого впливу сигналів керування
на прилади, технологічні або робочі машини.
Для керування характерна відкрита система проходження сигналів.
Сигнали з керувального пристрою діють на об'єкт керування без поточних
вимірювань і корекції керування.
Основи мехатроніки
6.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Процес керування
переміщенням стола верстата
Сигналом керування тут є напруга Uм, яка керує
двигуном механізму переміщення.
Процес руху стола верстата створює об'єкт
керування.
Величиною керування є переміщення s стола
верстата.
Поняття „керування" відноситься також до всіх
приладів, пристроїв або машин, в яких
відбувається процес керування.
На схемі роботи системи керування за
допомогою символів блоків і ліній впливу
показано взаємний вплив її окремих
складових елементів. Напрями впливу
позначаються стрілками.
Основи мехатроніки
7.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
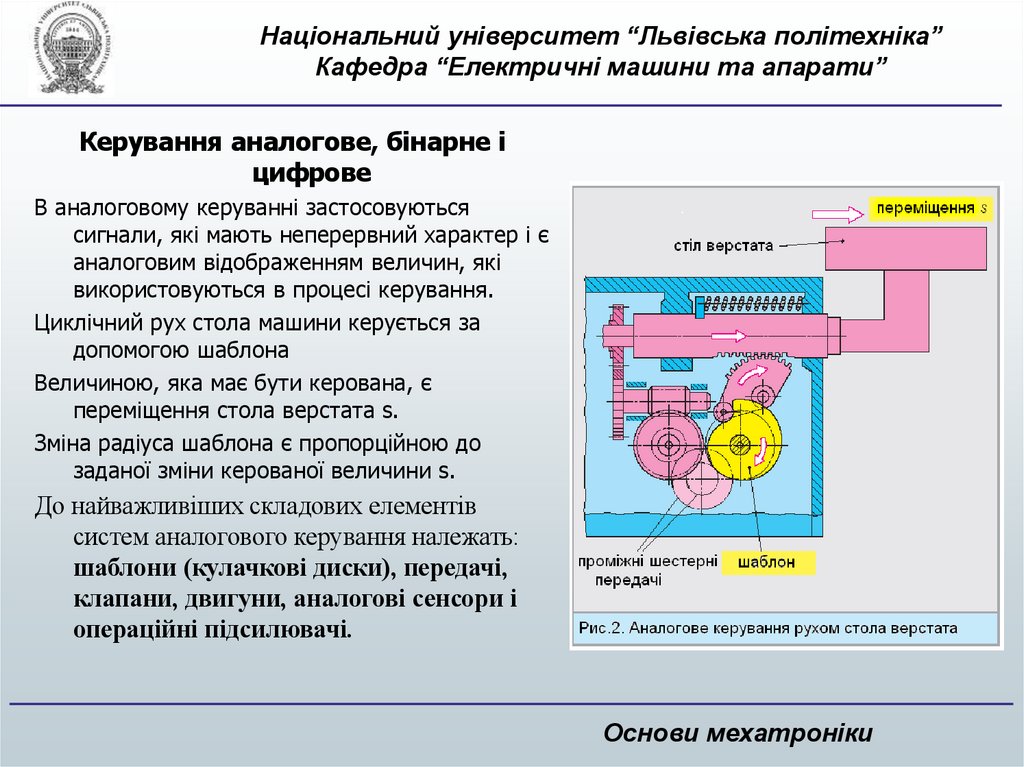
Керування аналогове, бінарне і
цифрове
В аналоговому керуванні застосовуються
сигнали, які мають неперервний характер і є
аналоговим відображенням величин, які
використовуються в процесі керування.
Циклічний рух стола машини керується за
допомогою шаблона
Величиною, яка має бути керована, є
переміщення стола верстата s.
Зміна радіуса шаблона є пропорційною до
заданої зміни керованої величини s.
До найважливіших складових елементів
систем аналогового керування належать:
шаблони (кулачкові диски), передачі,
клапани, двигуни, аналогові сенсори і
операційні підсилювачі.
Основи мехатроніки
8.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
У двійковому керуванні
використовуються сигнали двох рівнів
(бінарні).
Дворівневі сигнали представляються за
допомогою двох різних значень або станів,
наприклад, ВВІМКНЕНИЙ і ВИМКНЕНИЙ,
ЧОРНИЙ і БІЛИЙ, стан ЗАМКНЕНИЙ і
РОЗІМКНЕНИЙ або просто через 0 і 1.
Стіл шліфувального верстата повинен здійснювати
циклічні переміщення вперед і назад.
Якщо кулачок 1, з’єднаний із столом, перемкне
перемикач, то напруга керування двигуна
зміниться на протилежну і стіл буде
пересуватися вліво до моменту, коли кулачок 2
знову здійснить зміну напряму руху на
протилежний.
До найважливіших складових елементів систем
бінарного керування належать: реле,
перемикачі, діоди а також бінарні
електронні перемикальні кола.
Основи мехатроніки
9.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
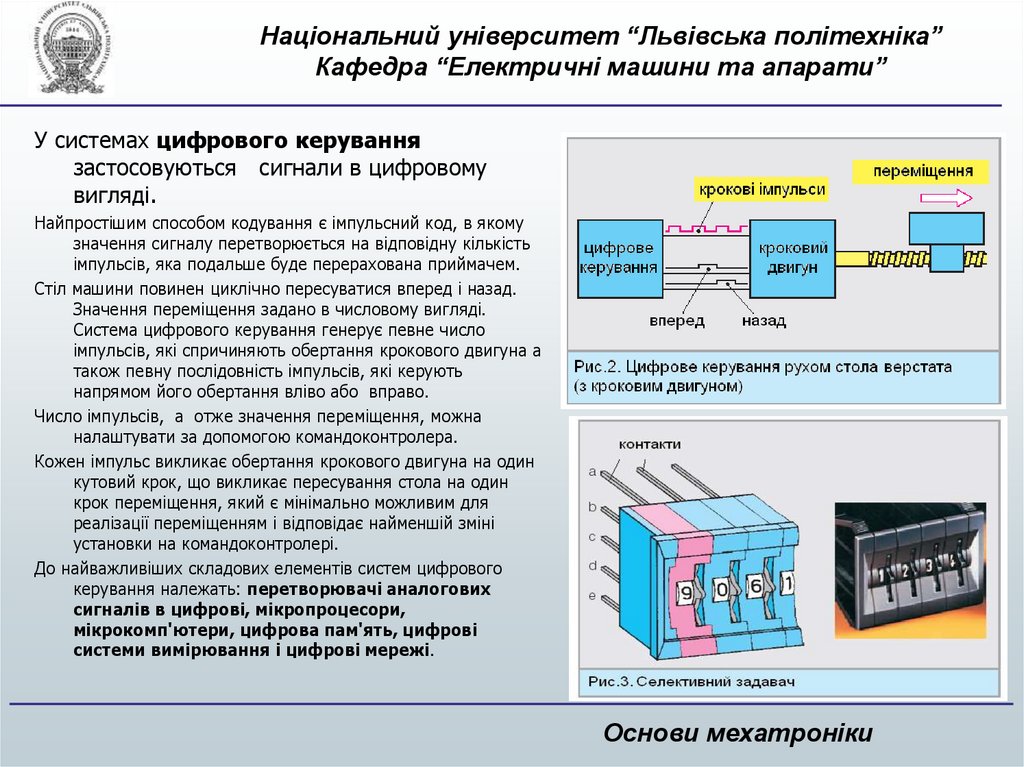
У системах цифрового керування
застосовуються сигнали в цифровому
вигляді.
Найпростішим способом кодування є імпульсний код, в якому
значення сигналу перетворюється на відповідну кількість
імпульсів, яка подальше буде перерахована приймачем.
Стіл машини повинен циклічно пересуватися вперед і назад.
Значення переміщення задано в числовому вигляді.
Система цифрового керування генерує певне число
імпульсів, які спричиняють обертання крокового двигуна а
також певну послідовність імпульсів, які керують
напрямом його обертання вліво або вправо.
Число імпульсів, а отже значення переміщення, можна
налаштувати за допомогою командоконтролера.
Кожен імпульс викликає обертання крокового двигуна на один
кутовий крок, що викликає пересування стола на один
крок переміщення, який є мінімально можливим для
реалізації переміщенням і відповідає найменшій зміні
установки на командоконтролері.
До найважливіших складових елементів систем цифрового
керування належать: перетворювачі аналогових
сигналів в цифрові, мікропроцесори,
мікрокомп'ютери, цифрова пам'ять, цифрові
системи вимірювання і цифрові мережі.
Основи мехатроніки
10.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
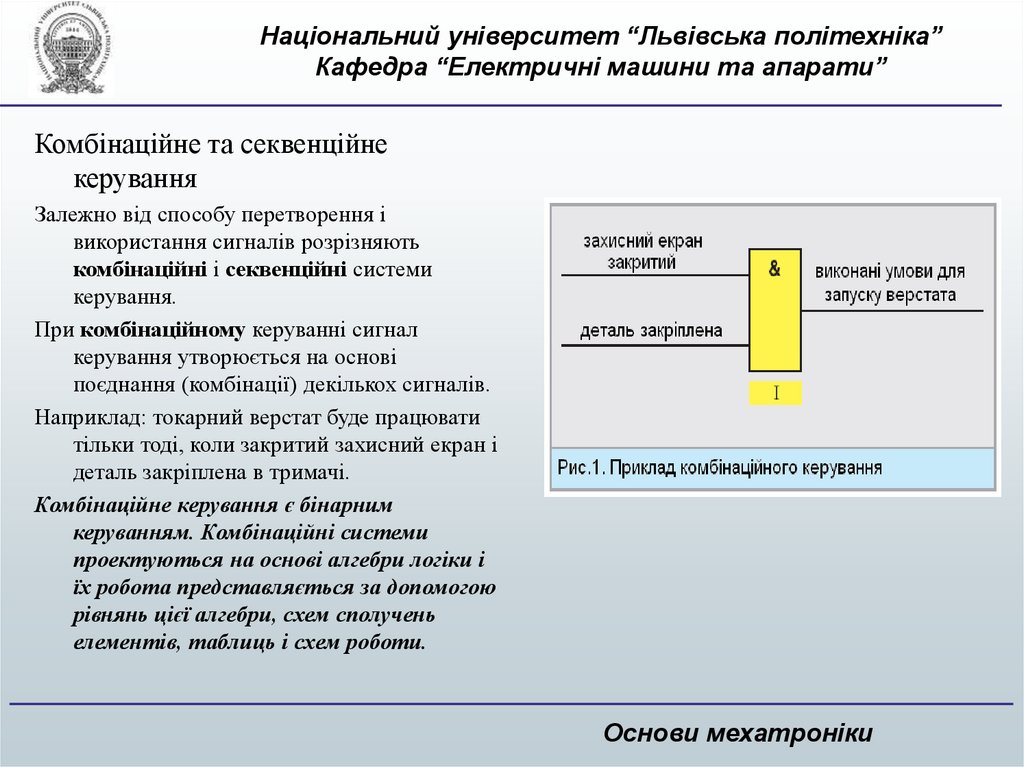
Комбінаційне та секвенційне
керування
Залежно від способу перетворення і
використання сигналів розрізняють
комбінаційні і секвенційні системи
керування.
При комбінаційному керуванні сигнал
керування утворюється на основі
поєднання (комбінації) декількох сигналів.
Наприклад: токарний верстат буде працювати
тільки тоді, коли закритий захисний екран і
деталь закріплена в тримачі.
Комбінаційне керування є бінарним
керуванням. Комбінаційні системи
проектуються на основі алгебри логіки і
їх робота представляється за допомогою
рівнянь цієї алгебри, схем сполучень
елементів, таблиць і схем роботи.
Основи мехатроніки
11.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
У системах секвенційного керування окремі керувальні дії відбуваються крок за кроком.
Початок наступного кроку залежить від часу або стану процесу.
У часово-секвенційних системах керування використовуються генератори імпульсів, тактові
таймери або часові реле.
У процесо-секвенційних системах керування перехід до наступного кроку викликається змінами
стану процесу.
Основи мехатроніки
12.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Постійнозапрограмоване і програмувальне
керування
Системи керування поділяються за способом реалізації і
запису програми. Розрізняють постійнозапрограмоване
керування (найчастіше в релейно-контакторній техніці) і
програмувальне керування (реалізоване за допомогою
PLC контролерів).
В системах релейно-контакторного керування перебіг
програми залежить від схеми з’єднань елементів
провідниками.
Якщо зміни в програмі не передбачаються, то така система
вважається постійнозапрограмованою, в протилежному
випадку це буде програмувальна система.
Перепрограмування можна здійснити шляхом зміни
положення штирів у діодній матриці (що рівноцінне зміні
схеми з'єднань провідниками ).
Програмувальні системи оснащуються електронною
пам’яттю, що дозволяє здійснювати їх
перепрограмування.
Основи мехатроніки
13.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Регулювання
Регулювання є дією, яка полягає в такому
впливі на поточно вимірювану
регульовану величину, щоб вона була
подібною до заданої величини.
Розрізняють регулювання за постійним
значенням координати (стабілізацію) і
слідкувальне.
Приклад регулювання за постійним
значенням. У печі для загартовування
необхідно підтримувати температуру на
постійному рівні.
У системі регулювання застосовано
тензометричний стрижень, який залежно
від значення температури в печі
видовжується або скорочується і виконує
роль давача температури, а також
регулювального і виконавчого пристрою.
Основи мехатроніки
14.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
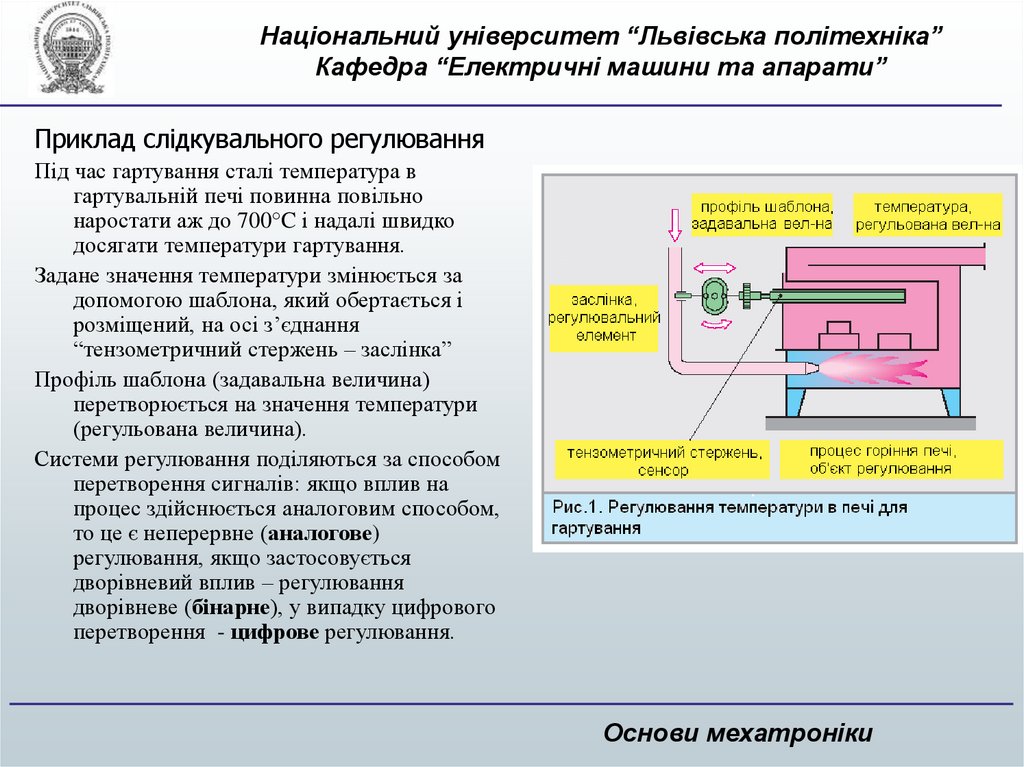
Приклад слідкувального регулювання
Під час гартування сталі температура в
гартувальній печі повинна повільно
наростати аж до 700°C і надалі швидко
досягати температури гартування.
Задане значення температури змінюється за
допомогою шаблона, який обертається і
розміщений, на осі з’єднання
“тензометричний стержень – заслінка”
Профіль шаблона (задавальна величина)
перетворюється на значення температури
(регульована величина).
Системи регулювання поділяються за способом
перетворення сигналів: якщо вплив на
процес здійснюється аналоговим способом,
то це є неперервне (аналогове)
регулювання, якщо застосовується
дворівневий вплив – регулювання
дворівневе (бінарне), у випадку цифрового
перетворення - цифрове регулювання.
Основи мехатроніки
15.
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Управління
Пристрої систем керування і регулювання в складних промислових установках,
наприклад в електростанціях, виробничих лініях і системах, підпорядковані системам
управління (які називають також системами вищого рівня керування і нагляду або
системами вищого рівня керування).
Під поняттям управління (керування і нагляд) розуміють різного роду дії, які
призводять до того, що керований процес протікає в бажаний спосіб.
Крім вимірювань, керування або регулювання до важливіших завдань управління
належать :
• нагляд,
• запобігання перед небезпекою,
а також обробка даних процесу:
• аналіз,
• презентація,
• рапортування,
• записування, оброблення, представлення, задавання, перетворення, передавання
інформації і відкриття доступу до неї.
Основи мехатроніки
16. Лекцію завершено. Дякую за увагу !
Національний університет “Львівська політехніка”Кафедра “Електричні машини та апарати”
Пристроями управління (пристроями керування і нагляду) є комп'ютери, прилади для
вимірювання даних процесу а також мережі пересилання, які поєднують ці
пристрої з децентралізованими пристроями вимірювання, керування і регулювання
даного процесу.
Лекцію завершено.
Дякую за увагу !
Які будуть запитання ?
Тема наступної лекції:
Основні принципи техніки керування.
Основи мехатроніки