





 mechanics
mechanicsSimilar presentations:








")

Пневматичне керування. Функціональні діаграми, пропорційне керування, електропневматичні системи керування, пневмогідравлічні
1. Пневматичне керування: функціональні діаграми, пропорційне керування, електропневматичні системи керування, пневмогідравлічні
приводи.Завдання 1:
Двигун двосторонньої дії 1A просуває
до штампувального двигуна 2A
обойму, в яку деталь
вкладається вручну, а потім
фіксує цю обойму.
Штампувальний двигун вибиває
на деталі штамп і повертається в
початкове положення. Потім
відбувається зворотний рух
двигуна 1A.
Розв’язування:
План-схема представляє
розташування привідних
елементів установки. На
спрощеній діаграмі станів
показана система рухів обох
двигунів
2.
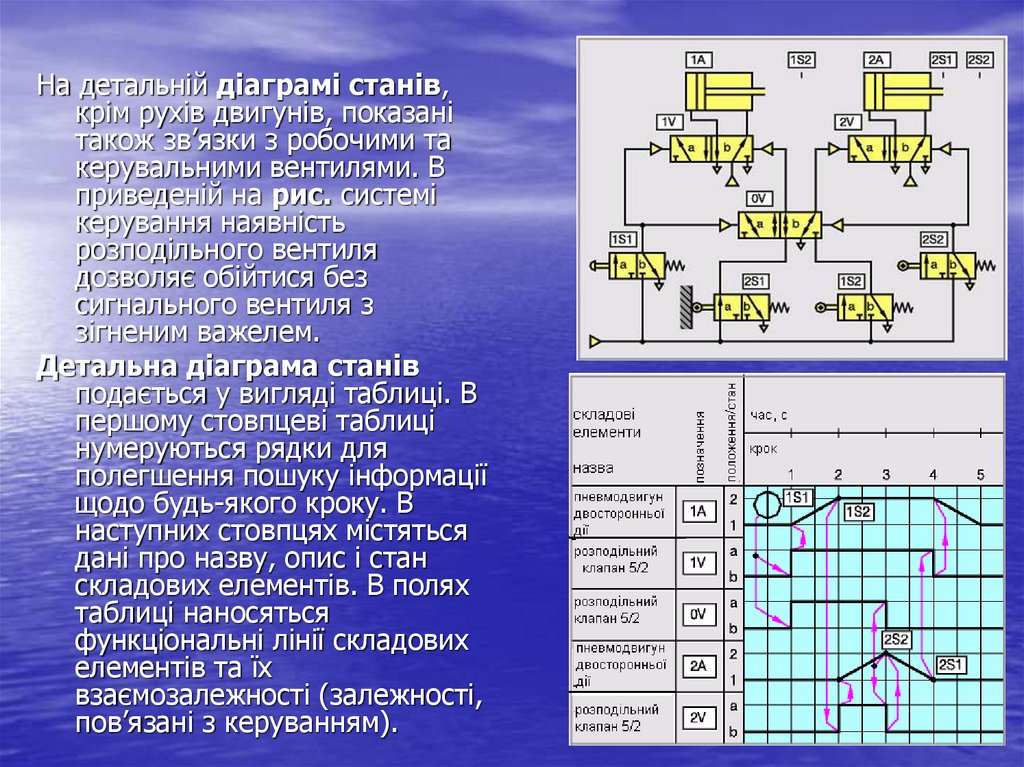
На детальній діаграмі станів,крім рухів двигунів, показані
також зв’язки з робочими та
керувальними вентилями. В
приведеній на рис. системі
керування наявність
розподільного вентиля
дозволяє обійтися без
сигнального вентиля з
зігненим важелем.
Детальна діаграма станів
подається у вигляді таблиці. В
першому стовпцеві таблиці
нумеруються рядки для
полегшення пошуку інформації
щодо будь-якого кроку. В
наступних стовпцях містяться
дані про назву, опис і стан
складових елементів. В полях
таблиці наносяться
функціональні лінії складових
елементів та їх
взаємозалежності (залежності,
пов’язані з керуванням).
3.
Приклад 1: На основі схеми керуванняпроцесом свердлування рис.
потрібно пояснити будову діаграми
станів:
Табл.1. Хід керування процесом свердлування
крок
опис
X0
початкове положення
X1
вмикання головного вентиля OV1 (на схемі
відсутній)
X2
вентиль 2S4 має бути ввімкнений (контроль
початкового положення рушія 2A)
1
вмикається вентиль 1S, робочий вентиль 1V1
перемикається з b в a, рушій 1A висувається
2
рушій 1A перемикає сенсор 1S1 i вентиль 1S2,
двигун M1свердла вмикається, вентиль 2V4
перемикається, рушій 2A швидко висувається.
Після витримки часу вентиля 2V1
відсмоктується приєднання 14 вентиля 2V4
(зникнення сигналу)
3
рушій 2A вмикає вентиль 2S3, вентиль 2V3
перемикається з b в a, рушій 2A зупиняється
4
рушій 2A вмикає вентиль 2S2, вентилі 2V4 i 2V3
перемикаються з a в b, рушій 2A швидко
втягується
5
рушій 2A вмикає 2S1 i сенсор S2, вентиль 1 V1
перемикається з a в b, рушій 1 A втягується,
двигун свердла вимикається.
4.
5.
Приклад 2:В ливарному цеху
виготовляються блоки
моторів для легкових
автомобілів (рис.). Після
відливання блоки необхідно
очистити і зняти заусенці.
Для цього вони подаються
стрічковим конвеєром на
місце очищення. Перед
очищенням блоки
прифіксовуються.
Шліфувальний круг монтується
на полозках пневматичного
лінійного приводу з
регулюванням положення.
Він проводиться вздовж
країв корпусу блока.
Завданням регулювання є
контроль позицій поворотів і
швидкості переміщення
круга.
6.
Приклад – пристрій для згинання. В пристроєві для згинання (рис.) штоки рушіїв 1Ai 2A виконують наступні рухи: 1A+ 2A+ 2A- 1A-. Залежності цих рухів від елементів
управління приведені у вигляді діаграми станів. В кінці кроку 1 елемент управління
S2 активується рушієм 1A і залишається перемкнутим до кінця кроку 3. Рушій 2A в
кінці кроку 2 активує елемент управління S4.
Тобто на початку кроку 3 введені в дію два
елементи управління S2 i S4, сигнали
яких діють на розподільний вентиль
рушія 2A, викликаючи протилежні дії –
втягування або висування штока. Отже,
сигнал елемента S4 зможе викликати
втягування штока двигуна 2А, якщо
перед цим був вимкнений сигнал з S2.
Таким чином, вирішення цього завдання
має бути пов’язане з вимкненням цього
сигналу.
7.
ПрикладНехай в системі регулювання пристрою кріплення
двигун 5 повинен, враховуючи форму деталі,
виконати довгий рух подачі. Високий тиск для
дотиснення потрібний лише в кінці ходу (рис.
9). Після ввімкнення клапана керування 1
бістабільний клапан 2 перемикається в
положення b, завдяки чому пневмогідравлічний
перетворювач 3 отримує живлення стисненим
повітрям і його олива перетікає через
гідравлічну частину підсилювача тиску 4 до
двигуна кріплення. Поблизу кінця руху шаблон
на штокові перемикає клапан управління 6 в
положення b, в результаті чого перемикається
бістабільний клапан 7 в положення b, i поршень
підсилювача тиску (поршень підсилювача в
гідравлічній частині є плунжером) рухається
вниз. До моменту занурення плунжера в
нижній частині гідравлічної сторони
підсилювача тиск оливи в підсилювачі дорівнює
тискові в перетворювачеві. Після занурення
плунжер підсилювача створює в рушієві
пристрою кріплення високий тиск. Відбувається
закріплення деталі.
Зворотний рух штока двигуна кріплення 5
спричинюється клапаном керування 8.
Бістабільний клапан 2 перемикається назад в
положення a, трубопровід до перетворювача 3 і
до вентиля управління 6 відсмоктується, а в
перетворювач 9 подається стиснене повітря.
Бістабільний клапан 7 може тепер знову
перемкнутися в положення a, завдяки чому
шток підсилювача пересунеться вгору; шток
двигуна механізму кріплення втягується.