




 physics
physicsSimilar presentations:
. Лекция № 6")









Колебания (продолжение). Лекция № 6
1. Лекция № 6
КОЛЕБАНИЯ(продолжение)
2. Свободные затухающие колебания
В реальных механических колебательныхсистемах энергия постепенно расходуется на
l0
работу против сил
m
x2 x x сопротивления и
k
x1 0
сил внутреннего
l x
m
трения.
Такие
системы
являются
k
Fупр Fс
m
l
диссипативными
(рис.6.1)
Рис. 6.1
В них механическая
энергия переходит в тепловую, а амплитуда
колебаний уменьшается с течением времени.
3.
Ур-е движения тела под действием силыупругости и силы сопротивления (при
c
небольших скоростях F r ) имеет вид:
y c
ma F F
x:
m x kx rx
:m
r
k
x x x 0
m
m
ДУ свободных затухающих колебаний
(СЗК):
2
x 2 x 0 x 0
(6.1)
4.
Здесьr
2m
k
0
m
– собственная частота
осциллятора,
– коэффициент затухания системы,
r – коэффициент сопротивления.
Решение ур-я (6.1) при ω0 > β имеет вид:
x A0e
t
A t
cos t
(6.2)
где ω – циклическая частота затухающих
колебаний:
2
2
0
(6.3)
5.
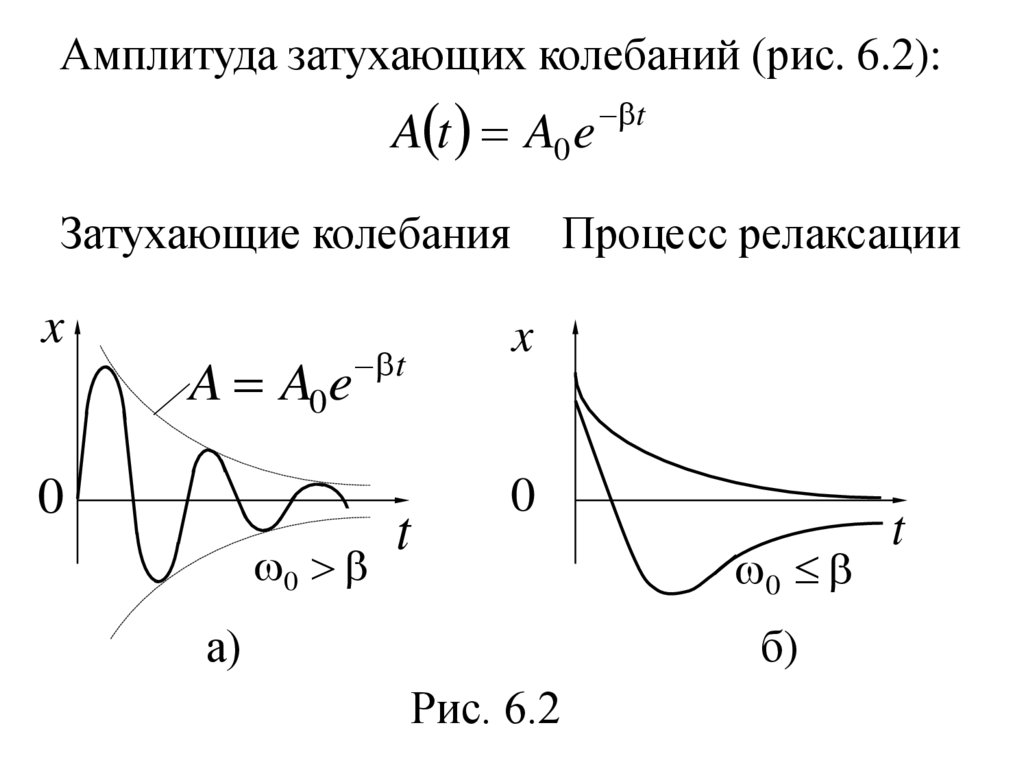
Амплитуда затухающих колебаний (рис. 6.2):A t A0 e
Затухающие колебания
x
A A0e
t
0
0
t
t
Процесс релаксации
x
0
0
а)
б)
Рис. 6.2
t
6.
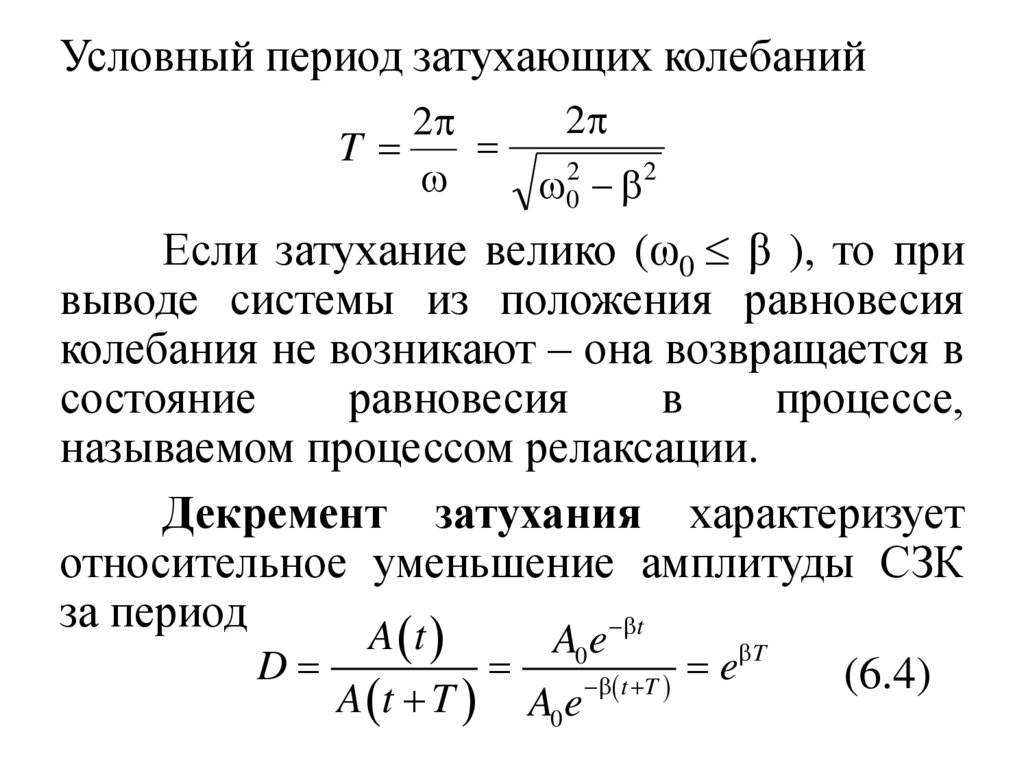
Условный период затухающих колебаний2
2
T
02 2
Если затухание велико (ω0 β ), то при
выводе системы из положения равновесия
колебания не возникают – она возвращается в
состояние
равновесия
в
процессе,
называемом процессом релаксации.
Декремент затухания характеризует
относительное уменьшение амплитуды СЗК
за период
A t
A0 e t
T
D
e
(6.4)
t T
A t T
A0 e
7.
Логарифмический декремент затухания:D ln D ln e T
T
(6.5)
Время релаксации
1
За это время амплитуда уменьшается в e раз.
Число колебаний, совершаемых системой за
время релаксации
1
1
Ne
T T D
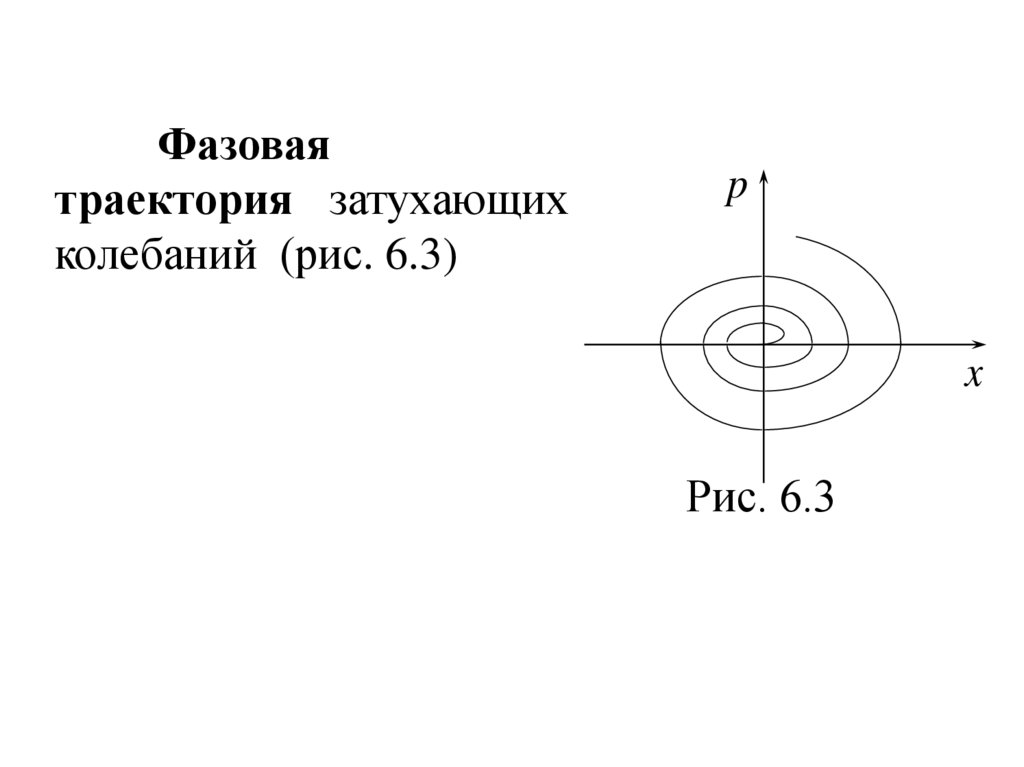
8.
Фазоваятраектория затухающих
колебаний (рис. 6.3)
p
x
Рис. 6.3
9. Вынужденные колебания
Чтобы возбудить в реальной колебательнойсистеме (рис.6.4) незатухающие колебания,
необходимо компенсировать потери энергии,
обусловленные
силами
сопротивления.
Для этого на
l0
m
систему
x2 x x
воздействуют
k
x1 0
l x
переменной
m F
внешней силой F ,
k
Fупр Fс m
в простейшем случае
F
l
изменяющейся
по
гармоническому
закону: Fx F0 cos t
Рис. 6.4
10.
где Ω – частота вынуждающей силы.Поведение системы описывается ДУ:
mx rx kx F0 cos t : m
2
x 2 x 0 x f 0 cos t
F0
f0
m
(6.6)
11. Установившиеся вынужденные колебания
Опыт показывает, что через некотороевремя после начала действия вынуждающей
силы
в
системе
устанавливаются
гармонические
колебания
с
частотой
вынуждающей силы, но отстающие от нее по
фазе. Решение ДУ (6.6) может быть
представлено в виде суммы решения
уравнения
СЗК
и
установившихся
вынужденных колебаний (общее решение
однородного ДУ + частное решение
неоднородного ДУ).
12.
Для установившихся колебаний имеем:x A cos t
(6.7)
где A – амплитуда колебаний объекта массой
m, α – сдвиг фаз между колебаниями объекта
и внешней силой F(t).
13. Механический резонанс
Резонанс – физическое явление,состоящее в резком возрастании амплитуды
установившихся вынужденных колебаний
системы, вызываемое вынуждающей силой с
некоторой характерной частотой, называемой
резонансной.
Резонансная частота
p
2
2
0 2
(6.8)
14.
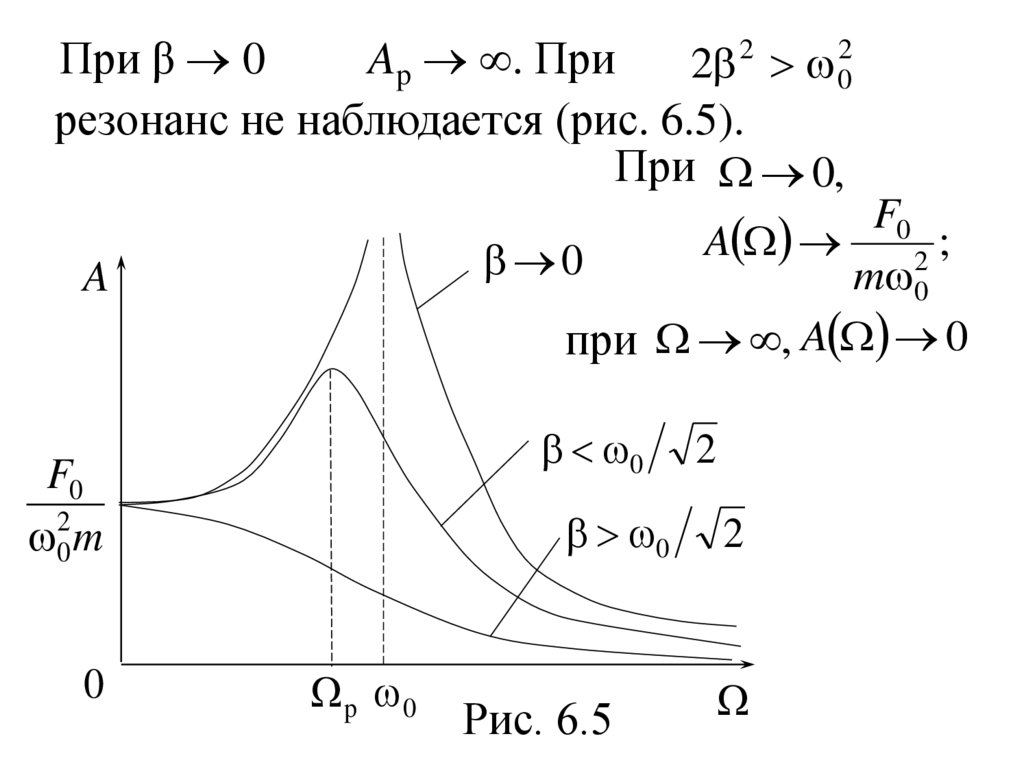
При β 0Ap . При
2 2 02
резонанс не наблюдается (рис. 6.5).
При 0,
F0
A
;
2
0
m 0
при , A 0
A
0
F0
02 m
0
0
p 0
Рис. 6.5
2
2