

 electronics
electronicsSimilar presentations:










Радиоавтоматика. Коррекция систем авторегулирования. Лекция 9
1.
РАДИОАВТОМАТИКАЛекция 9
КОРРЕКЦИЯ СИСТЕМ
АВТОРЕГУЛИРОВАНИЯ
2. ВИДЫ КОРРЕКЦИИ
Коррекция необходима, если САР, составленная изобязательных элементов, неустойчива или не
обеспечивает заданного качества регулирования
1. Последовательная коррекция.
Kж(p)
Kж(jω) = Kоб(jω) Kк(jω)
x(t)
Кк(р)
Kоб(p)
y(t)
Lж(ω) = Lоб(ω) + Lк(ω)
Lк(ω) = Lж(ω) – Lоб(ω)
2. Параллельная коррекция.
Kж(p)
x(t)
Kоб(p)
Кк(р)
y(t)
Kж(jω) = Kоб(jω) + Kк(jω)
Kк(jω) = Kж(jω) – Kоб(jω)
3.
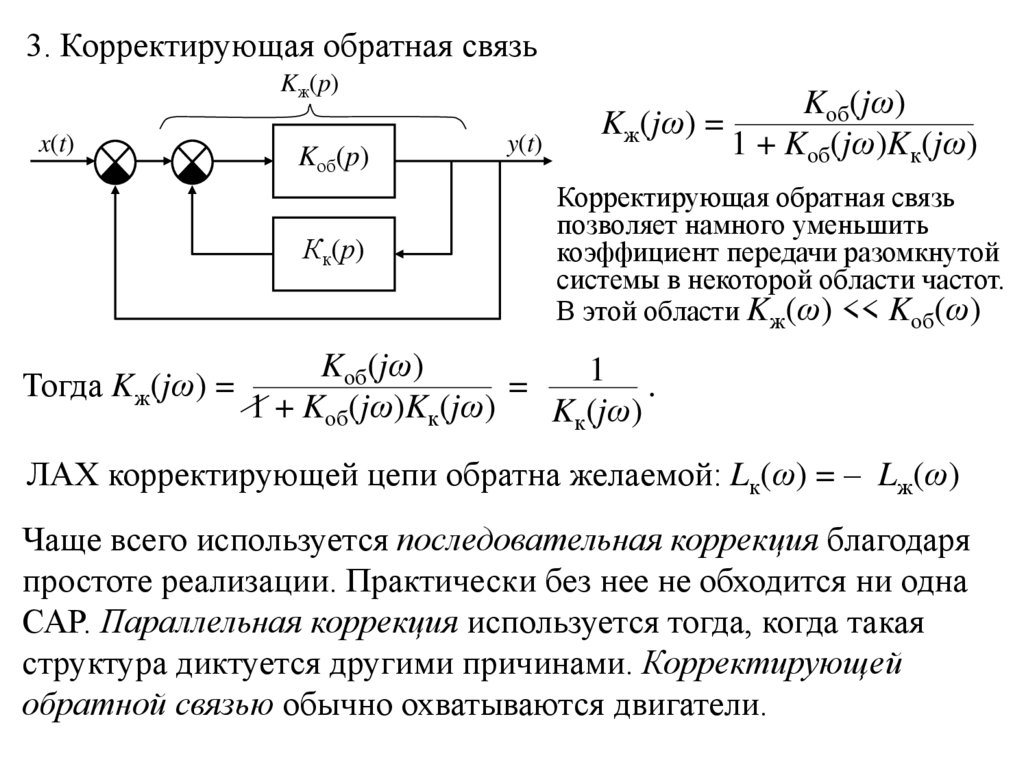
3. Корректирующая обратная связьKж(p)
x(t)
Kоб(p)
Кк(р)
Тогда Kж(jω) =
y(t)
Kж(jω) =
Kоб(jω)
1 + Kоб(jω)Kк(jω)
Корректирующая обратная связь
позволяет намного уменьшить
коэффициент передачи разомкнутой
системы в некоторой области частот.
В этой области Kж(ω) << Kоб(ω)
Kоб(jω)
1 .
=
1 + Kоб(jω)Kк(jω)
Kк(jω)
ЛАХ корректирующей цепи обратна желаемой: Lк(ω) = – Lж(ω)
Чаще всего используется последовательная коррекция благодаря
простоте реализации. Практически без нее не обходится ни одна
САР. Параллельная коррекция используется тогда, когда такая
структура диктуется другими причинами. Корректирующей
обратной связью обычно охватываются двигатели.
4. ПОСЛЕДОВАТЕЛЬНАЯ КОРРЕКЦИЯ АСТАТИЧЕСКОЙ СИСТЕМЫ 1-го ПОРЯДКА
Рассмотрим коррекцию на примере системы ФАПЧ.uвх(t)
ωвх
uфд
ФД
ФНЧ
УПТ
uпг(t)
ПГ
ωпг
Дискриминационная характеристика фазового дискриминатора
uфд
Umфд
φ, рад
0
-π/2
π/2
π
3π/2
Линейная модель системы ФАПЧ
ωвх
ωпг0
Δω
1/p
φ
Kфд
1+pTфд
uфд = Kфдφ для –π/2< φ < π/2
2Umфд
Kфд = π
[В/рад]
в х (t ) пг (t ) dt
Кфнч(р)
Купт
Kпг
1+pTпг
Δωпг
5.
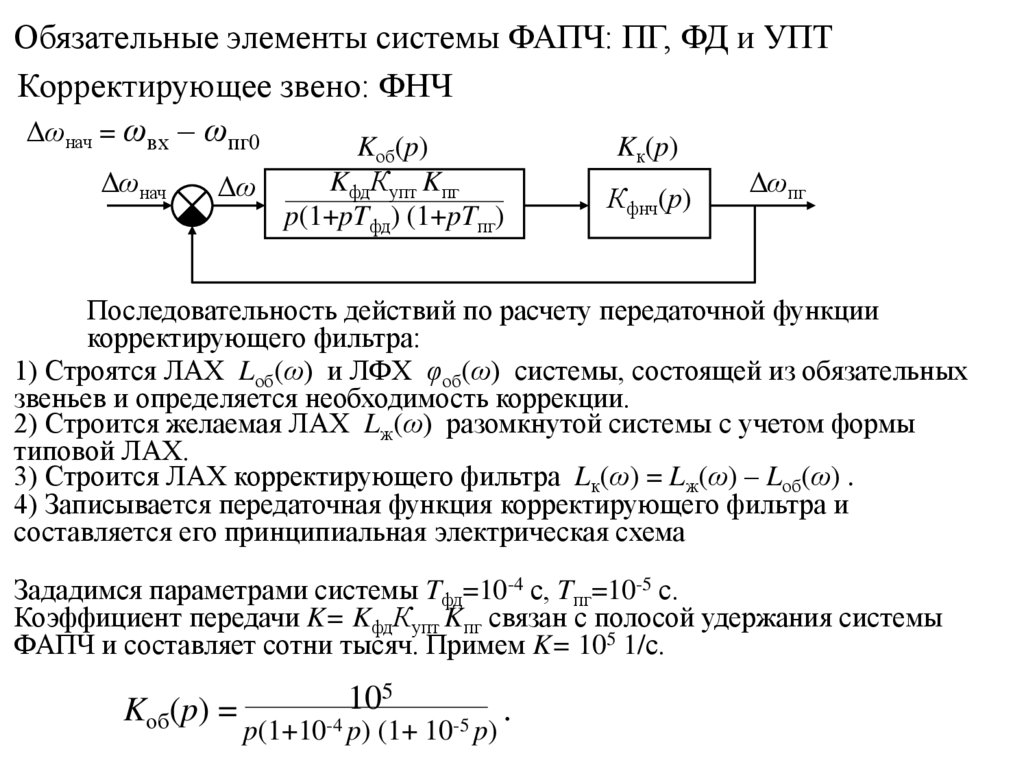
Обязательные элементы системы ФАПЧ: ПГ, ФД и УПТКорректирующее звено: ФНЧ
Δωнач = ωвх – ωпг0
K (p)
K (p)
Δωнач
об
Δω
KфдКупт Kпг
p(1+pTфд) (1+pTпг)
к
Кфнч(р)
Δωпг
Последовательность действий по расчету передаточной функции
корректирующего фильтра:
1) Строятся ЛАХ Lоб(ω) и ЛФХ φоб(ω) системы, состоящей из обязательных
звеньев и определяется необходимость коррекции.
2) Строится желаемая ЛАХ Lж(ω) разомкнутой системы с учетом формы
типовой ЛАХ.
3) Строится ЛАХ корректирующего фильтра Lк(ω) = Lж(ω) – Lоб(ω) .
4) Записывается передаточная функция корректирующего фильтра и
составляется его принципиальная электрическая схема
Зададимся параметрами системы Tфд=10-4 с, Tпг=10-5 с.
Коэффициент передачи K= KфдКупт Kпг связан с полосой удержания системы
ФАПЧ и составляет сотни тысяч. Примем K= 105 1/с.
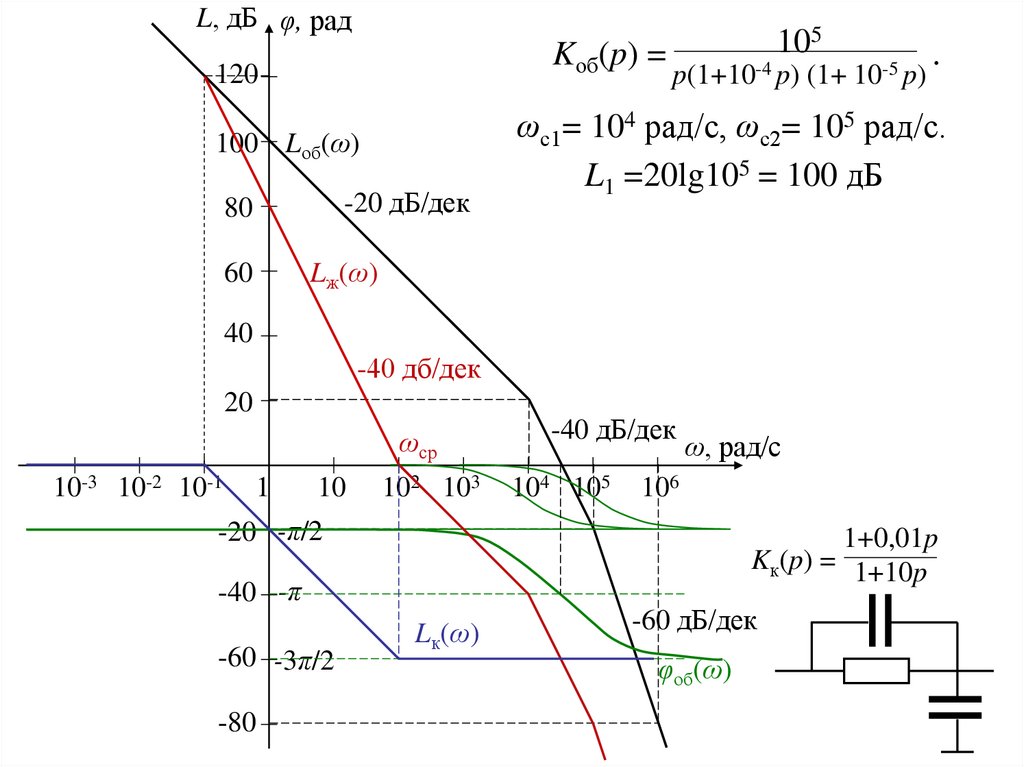
Kоб(p) =
105
p(1+10-4 p) (1+ 10-5 p)
.
6.
L, дБ φ, радKоб(p) =
120
100 Lоб(ω)
-20 дБ/дек
80
105
p(1+10-4 p) (1+ 10-5 p)
.
ωс1= 104 рад/с, ωс2= 105 рад/с.
L1 =20lg105 = 100 дБ
Lж(ω)
60
40
-40 дб/дек
20
ωср
10-3 10-2 10-1
1
10
102 103
-40 дБ/дек
104 105
ω, рад/с
106
-20 -π/2
1+0,01p
Kк(p) = 1+10p
-40 -π
-60 -3π/2
-80
Lк(ω)
-60 дБ/дек
φоб(ω)