

 electronics
electronicsSimilar presentations:










Радиоавтоматика. Оценка качества регулирования. Типовые ЛАХ разомкнутой системы
1.
РАДИОАВТОМАТИКАЛекция 8
ОЦЕНКА КАЧЕСТВА
РЕГУЛИРОВАНИЯ.
ТИПОВЫЕ ЛАХ РАЗОМКНУТОЙ
СИСТЕМЫ
2. ОШИБКИ ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
xз(t)y(t)
Кр(р)
Ошибка δ(t)
xв(t)
yж(t)
Δ(p) = Yж(p) – Y (p) = Xз(p) – [Xз(p) + Xв(p)]Kз(p) = Xз(p)[1 – Kз(p)] – Xв(p) Kз(p) .
Изображение
ошибки по
возмущению
Изображение
динамической
ошибки
Kош(p) = 1 – Kз(p).
Пусть xз(t) и xв(t) – стационарные нормальные некоррелированные процессы.
Тогда энергетический спектр ошибки Sδ(ω) = Sxз(ω) |Kош(jω)|2 + Sxв(ω) |Kз(jω)|2
2
Дисперсия ошибки: 2 дин
в2оз
Дисперсия динамической ошибки:
2
дин
1
2
S xз ( ) K ош ( j ) d
2
1
2
Дисперсия ошибки по возмущению: воз
2
S xв ( ) K з ( j ) d
2
3.
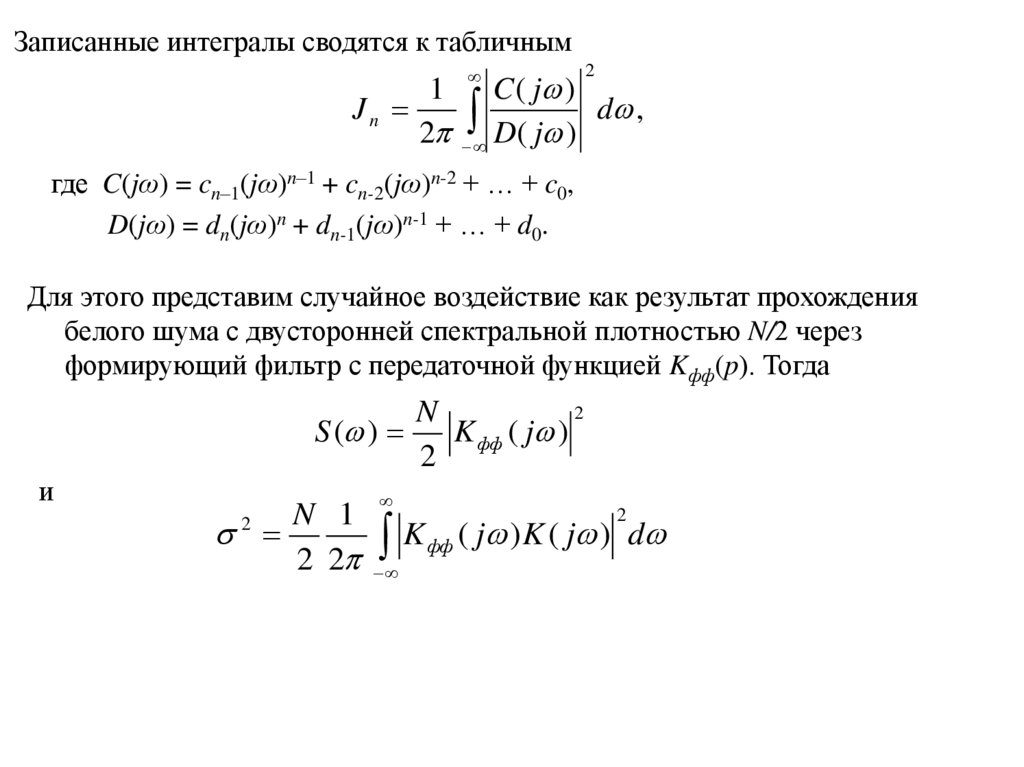
Записанные интегралы сводятся к табличным1
Jn
2
2
C ( j )
D( j ) d ,
где C(jω) = cn–1(jω)n–1 + cn-2(jω)n-2 + … + c0,
D(jω) = dn(jω)n + dn-1(jω)n-1 + … + d0.
Для этого представим случайное воздействие как результат прохождения
белого шума с двусторонней спектральной плотностью N/2 через
формирующий фильтр с передаточной функцией Kфф(p). Тогда
2
N
S ( )
K фф ( j )
2
и
N 1
2
2 2
K
2
фф
( j ) K ( j ) d
4.
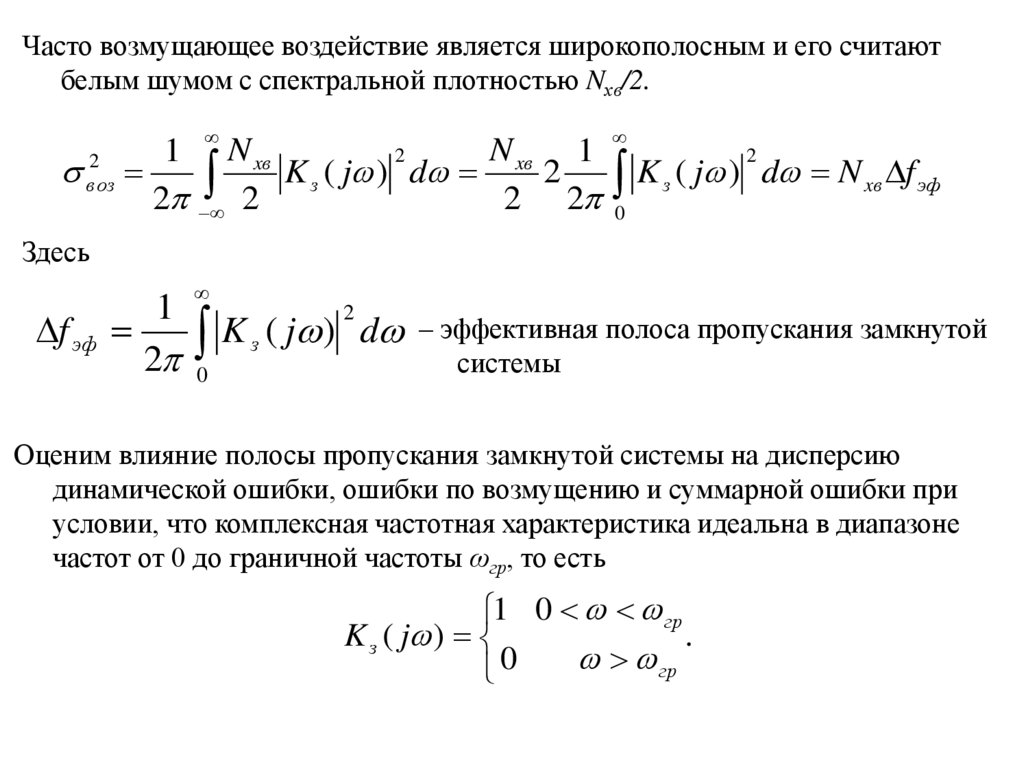
Часто возмущающее воздействие является широкополосным и его считаютбелым шумом с спектральной плотностью Nxв/2.
1
2
воз
2
N xв
N xв 1
2
2 K з ( j ) d 2 2 2
K
( j ) d N xв f эф
2
з
0
Здесь
f эф
1
2
K
0
( j ) d
2
з
– эффективная полоса пропускания замкнутой
системы
Оценим влияние полосы пропускания замкнутой системы на дисперсию
динамической ошибки, ошибки по возмущению и суммарной ошибки при
условии, что комплексная частотная характеристика идеальна в диапазоне
частот от 0 до граничной частоты ωгр, то есть
1 0 гр
K з ( j )
.
гр
0
5.
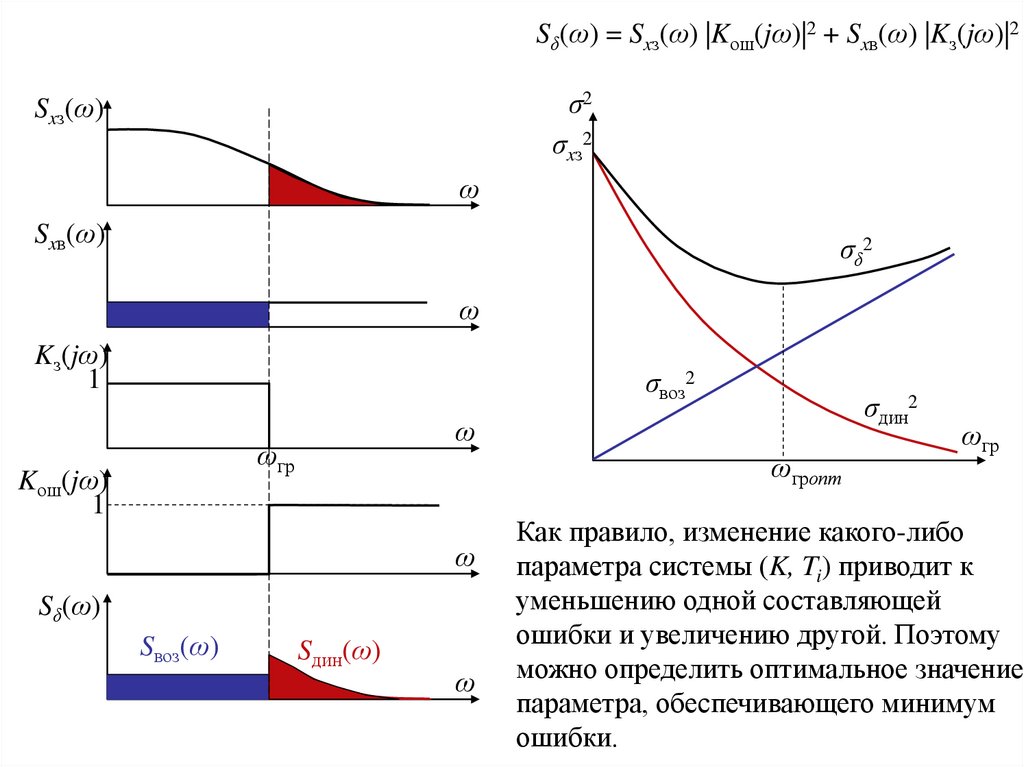
Sδ(ω) = Sxз(ω) |Kош(jω)|2 + Sxв(ω) |Kз(jω)|2σ2
Sxз(ω)
σxз2
ω
Sxв(ω)
σδ2
ω
Kз(jω)
1
σвоз2
ω
ωгр
Kош(jω)
1
ωгропт
ω
Sδ(ω)
Sвоз(ω)
σдин2
Sдин(ω)
ω
ωгр
Как правило, изменение какого-либо
параметра системы (K, Ti) приводит к
уменьшению одной составляющей
ошибки и увеличению другой. Поэтому
можно определить оптимальное значение
параметра, обеспечивающего минимум
ошибки.
6. ТИПОВЫЕ ЛАХ РАЗОМКНУТОЙ СИСТЕМЫ
Под типовыми ЛАХ разомкнутой системы будем понимать обычноиспользуемые ЛАХ, отобранные практикой проектирования САР.
На ЛАХ накладываются следующие ограничения.
Область НЧ: Низкочастотная асимптота ЛАХ полностью определяется
заданными ошибками – статической, скоростной и по ускорению
Постоянная ошибка
Наклон ЛАХ
Коэффициент
передачи
Тип системы
δст=x0/(1+K)
0 дБ/дек.
K= x0/ ст- 1
статическая
δск=vx/K
– 20 дБ/дек.
K= vx/ ск
δуск=ax/K
– 40 дБ/дек.
K= ax/δуск
астатическая 1-го
порядка
астатическая 2-го
порядка
Область СЧ: ЛАХ должна пересекать ось частот под наклоном –20 дБ/дек. и
длина участка с таким наклоном должна составлять 1 - 2 декады в зависимости от
величины перерегулирования.
Область ВЧ: ЛАХ должна идти по возможности круче, чтобы лучше подавить
высокочастотные составляющие возмущающих воздействий.
7.
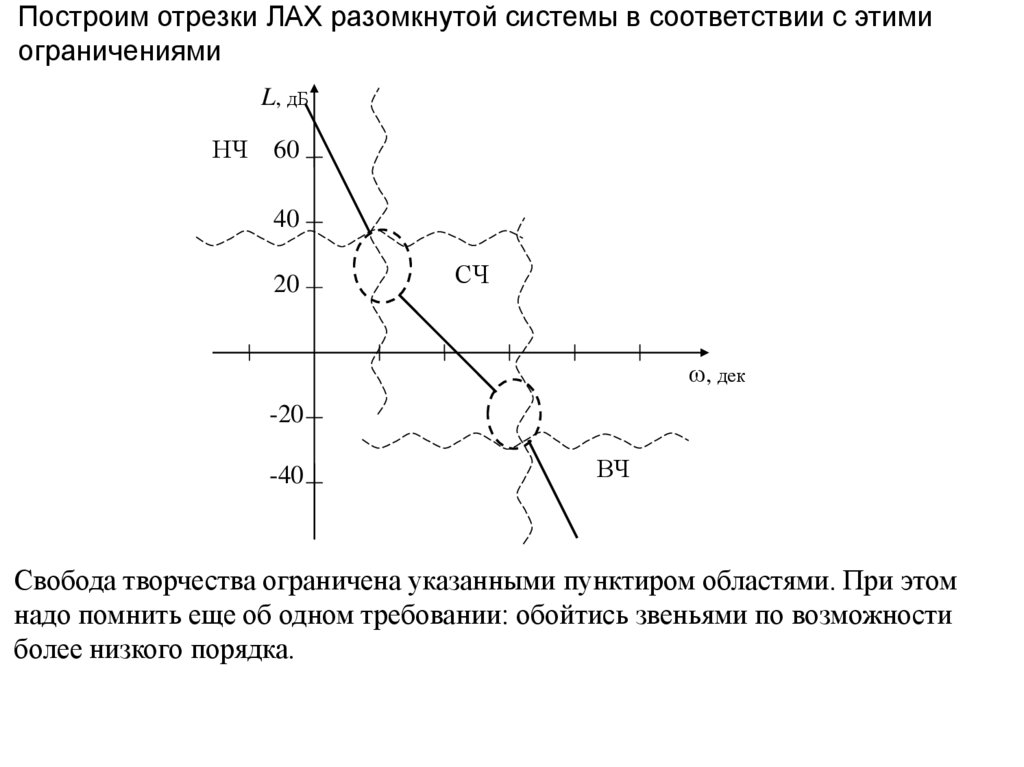
Построим отрезки ЛАХ разомкнутой системы в соответствии с этимиограничениями
L, дБ
НЧ
60
40
20
СЧ
ω, дек
-20
-40
ВЧ
Свобода творчества ограничена указанными пунктиром областями. При этом
надо помнить еще об одном требовании: обойтись звеньями по возможности
более низкого порядка.
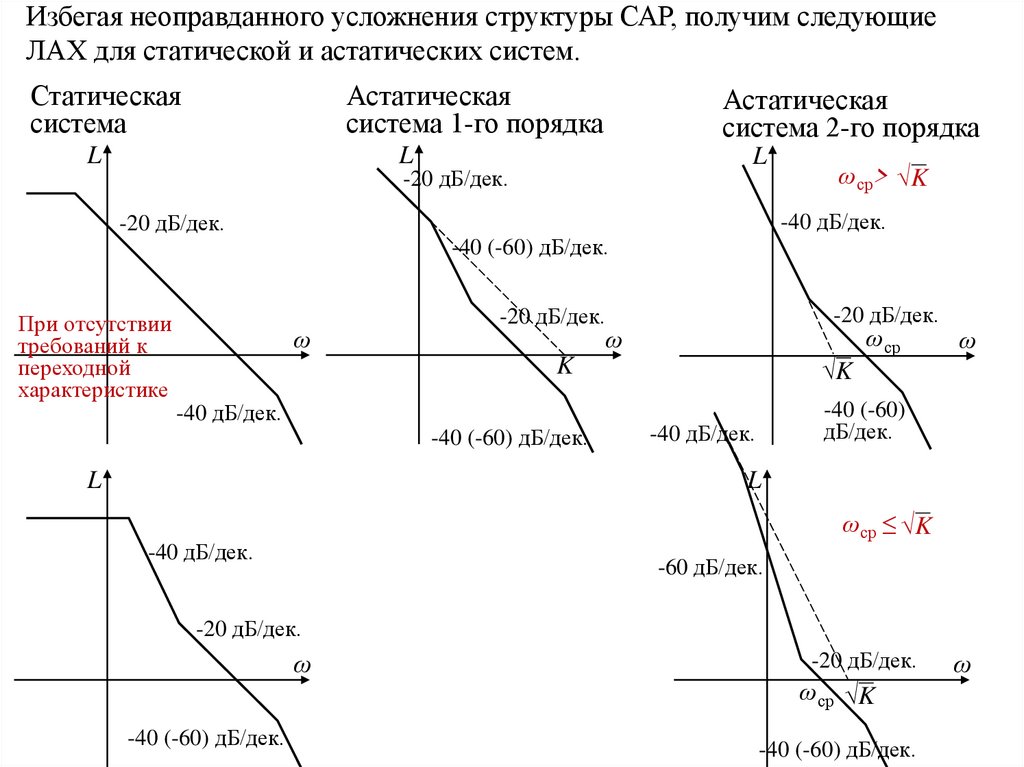
8.
Избегая неоправданного усложнения структуры САР, получим следующиеЛАХ для статической и астатических систем.
Статическая
система
Астатическая
система 1-го порядка
L
Астатическая
система 2-го порядка
L
L
-20 дБ/дек.
-40 дБ/дек.
-20 дБ/дек.
При отсутствии
требований к
переходной
характеристике
ωср> √K
-40 (-60) дБ/дек.
ω
-20 дБ/дек.
-20 дБ/дек.
ω
√K
K
-40 дБ/дек.
-40 (-60) дБ/дек.
L
ωср
ω
-40 (-60)
дБ/дек.
-40 дБ/дек.
L
ωср ≤ √K
-40 дБ/дек.
-60 дБ/дек.
-20 дБ/дек.
ω
-40 (-60) дБ/дек.
-20 дБ/дек.
ωср √K
-40 (-60) дБ/дек.
ω