























 mechanics
mechanicsSimilar presentations:










Детали машин. Основы проектирования и классификация механизмов, узлов и деталей. Кинематический расчет привода
1.
Детали машин2.
Тема № 1. «Основы проектирования иклассификация механизмов, узлов и деталей».
Практическое занятие № 1.2
«Кинематический расчет привода».
3.
Цели занятия• Изучить обозначения элементов привода на
кинематических схемах.
• Рассмотреть на примере кинематический расчет
привода и выбор электродвигателя.
• Проверить качество усвоения учебного материала.
4.
Учебные вопросы:1. Выбор оптимальных кинематических схем механизмов.
2. Кинематический расчет привода, выбор электродвигателя.
3. Техническое задание для выполнения расчетно-графической
работ.
5.
Основы проектирования механизмов,стадии разработки.
6.
Основные стадии проектирования механизмов и деталей машинПервый этап
проектный расчет
определение конструкции
детали, геометрических
характеристик, а так же
подбор материала.
Второй этап
проверочные расчеты
Расчет на прочность, жесткость ,
износостойкость ,
теплостойкость ,
виброустойчивость и т.д.
Сводится к определению
максимальных значений параметра
и сравнении их с предельно
допустимым.
Расчет на усталостную прочность
сводится к определению коэффициента
запаса прочности материала вала при
одновременном действии циклических
нормальных (при изгибе) и касательных
(при кручении) напряжений.
7.
Проект – совокупности расчетов, графических материалов ипояснений к ним предназначенных для обоснования и
определения параметров конструкции (кинематических,
динамических, геометрических и других), ее производительности,
экономической эффективности. Для особо ответственных
конструкций проект дополняют макетом или действующей моделью.
Проектирование изделия – разработка комплекта
документации, необходимой для его изготовления, наладки и
эксплуатации в заданных условиях и в течение заданного срока.
8.
Контрольная работа (КР) – самостоятельная работа обучающегося,направленная на выполнения поставленного задания.
Целью проектирование, в рамках КР, ставится:
- выбор конструктивного исполнения элементов узлов, входящих в
состав привода (определяется заданием, существующими
конструкторскими решениями);
- определение кинематических параметров (передаточного отношения,
к.п.д., крутящего момента и угловой скорости на выходном валу) для
каждой ступени привода;
- выбор электрического двигателя для привода проектируемого
механизма;
- проведение проектного расчета элементов привода с определением
геометрических размеров компонентов, выбор материала;
- проведение силового (проверочного) расчета элементов привода;
- оформление графической части;
9.
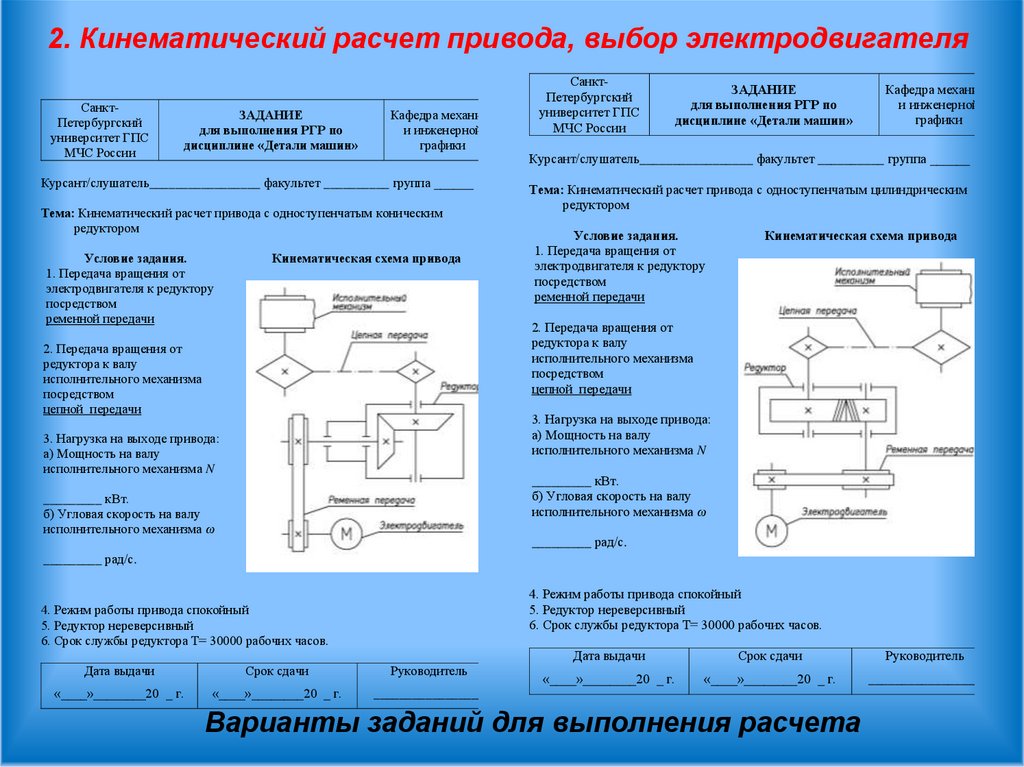
СанктПетербургскийуниверситет ГПС
МЧС России
Кафедра механики
ЗАДАНИЕ
и инженерной
для выполнения курсового проекта
графики
по дисциплине «Детали машин»
Курсант/слушатель_________________ факультет __________ группа ______
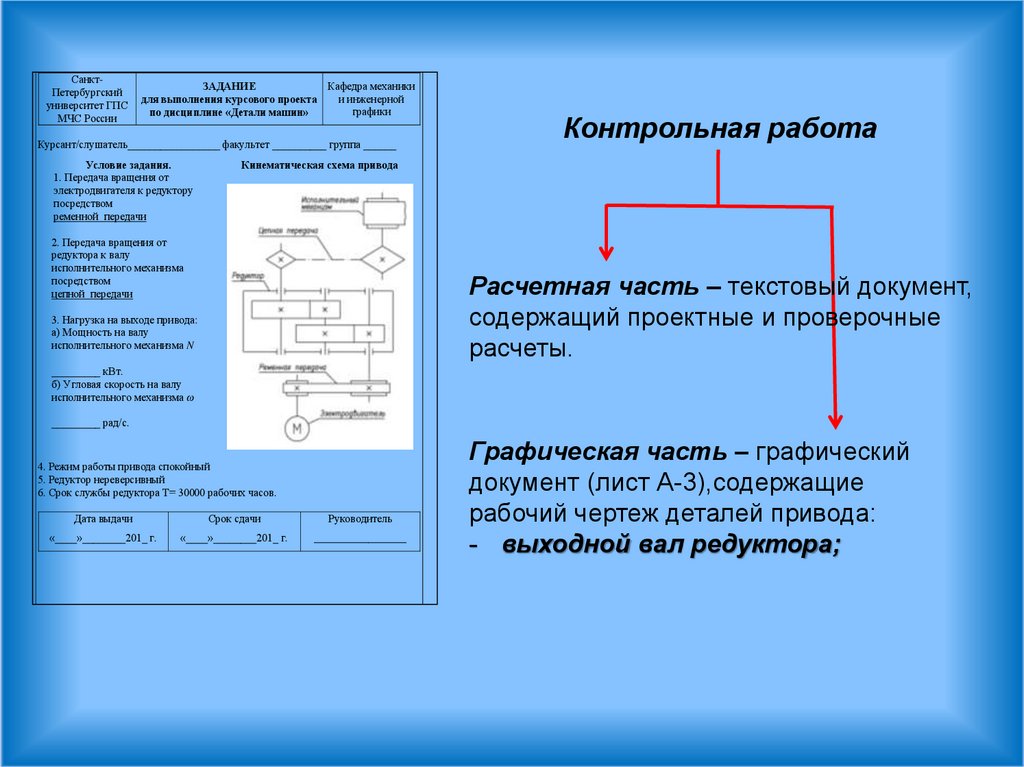
Условие задания.
1. Передача вращения от
электродвигателя к редуктору
посредством
ременной передачи
Контрольная работа
Кинематическая схема привода
2. Передача вращения от
редуктора к валу
исполнительного механизма
посредством
цепной передачи
Расчетная часть – текстовый документ,
содержащий проектные и проверочные
расчеты.
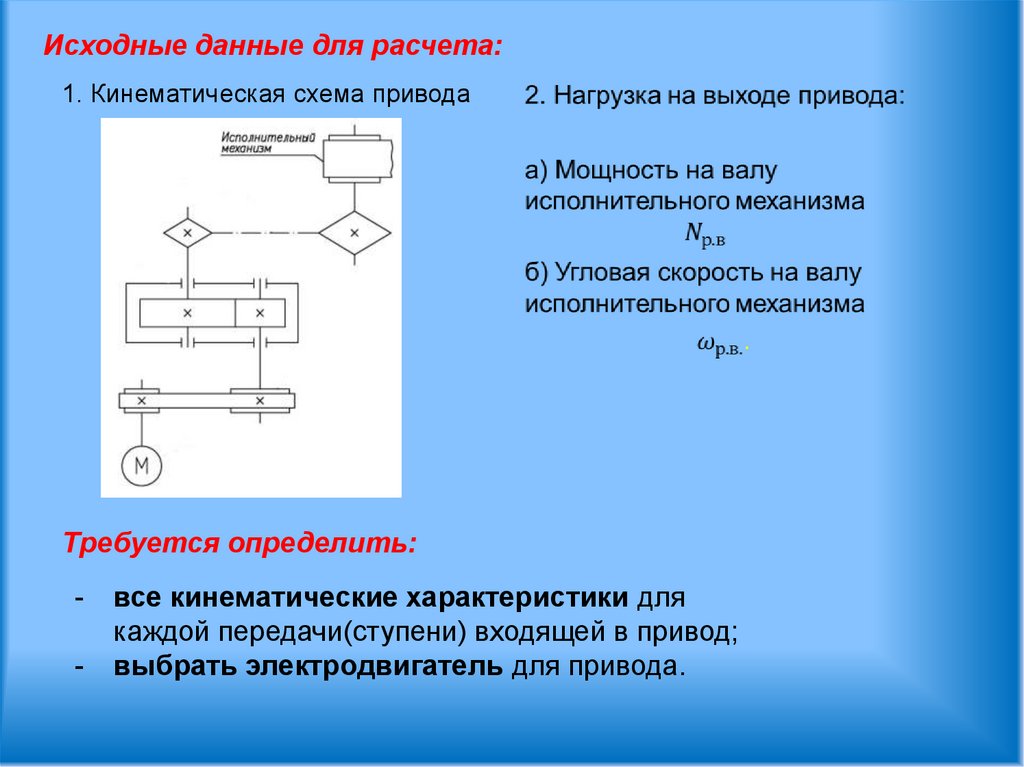
3. Нагрузка на выходе привода:
а) Мощность на валу
исполнительного механизма N
_________ кВт.
б) Угловая скорость на валу
исполнительного механизма ω
_________ рад/с.
4. Режим работы привода спокойный
5. Редуктор нереверсивный
6. Срок службы редуктора Т= 30000 рабочих часов.
Дата выдачи
Срок сдачи
Руководитель
«____»________201_ г.
«____»________201_ г.
_________________
Графическая часть – графический
документ (лист А-3),содержащие
рабочий чертеж деталей привода:
- выходной вал редуктора;
10.
1. Кинематические схемы приводов машин.• Привод - механизм, содержащий одну или несколько
передач, служащий для передачи движения от двигателя к
исполнительному органу, как правило, с преобразованием
скорости и изменением вращающего момента.
Как правило, все передачи привода и приводящий двигатель
монтируются последовательно на раме и представляют собой
единый агрегат.
11.
Источникэнергии(движения)
привод
Потребитель энергии
(рабочий механизм)
Требуемые параметры
Исходные параметры
Преобразование
Основные функции механических передач привода :
изменение скорости (как следствие крутящего момента);
изменение направления движения;
преобразования вида движения (вращательного в поступательное и
наоборот, равномерное в прерывистое, и т.д.);
приведение в движение одним двигателем нескольких механизмов;
12.
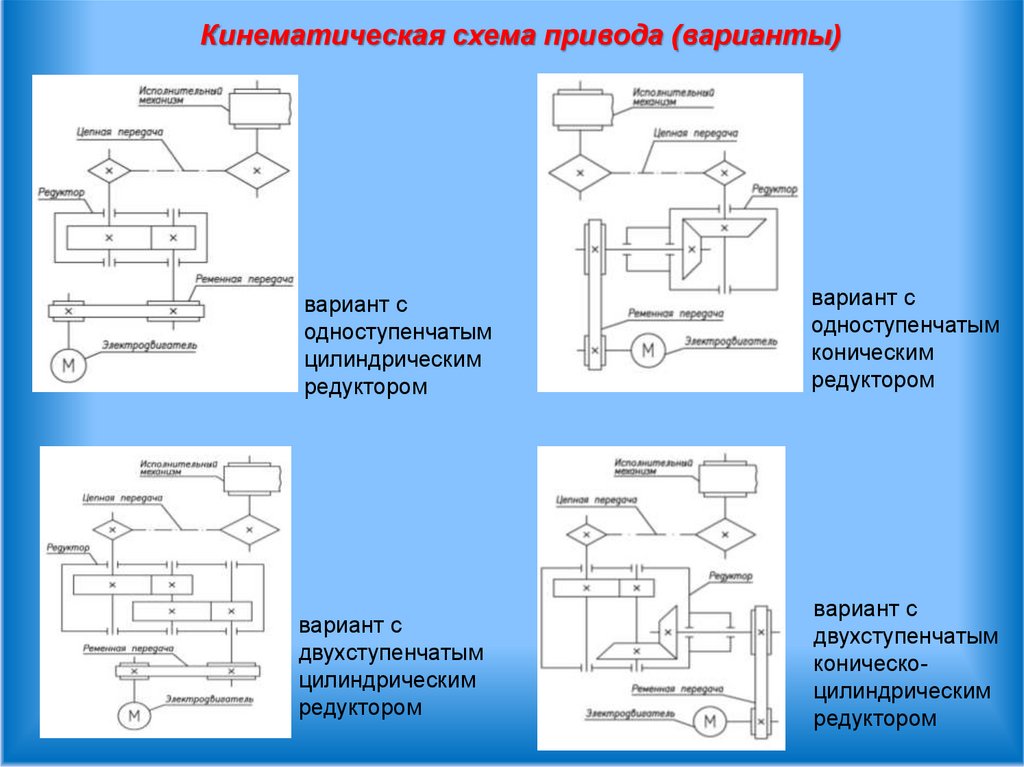
Кинематическая схема привода (варианты)вариант с
одноступенчатым
цилиндрическим
редуктором
вариант с
одноступенчатым
коническим
редуктором
вариант с
двухступенчатым
цилиндрическим
редуктором
вариант с
двухступенчатым
коническоцилиндрическим
редуктором
13.
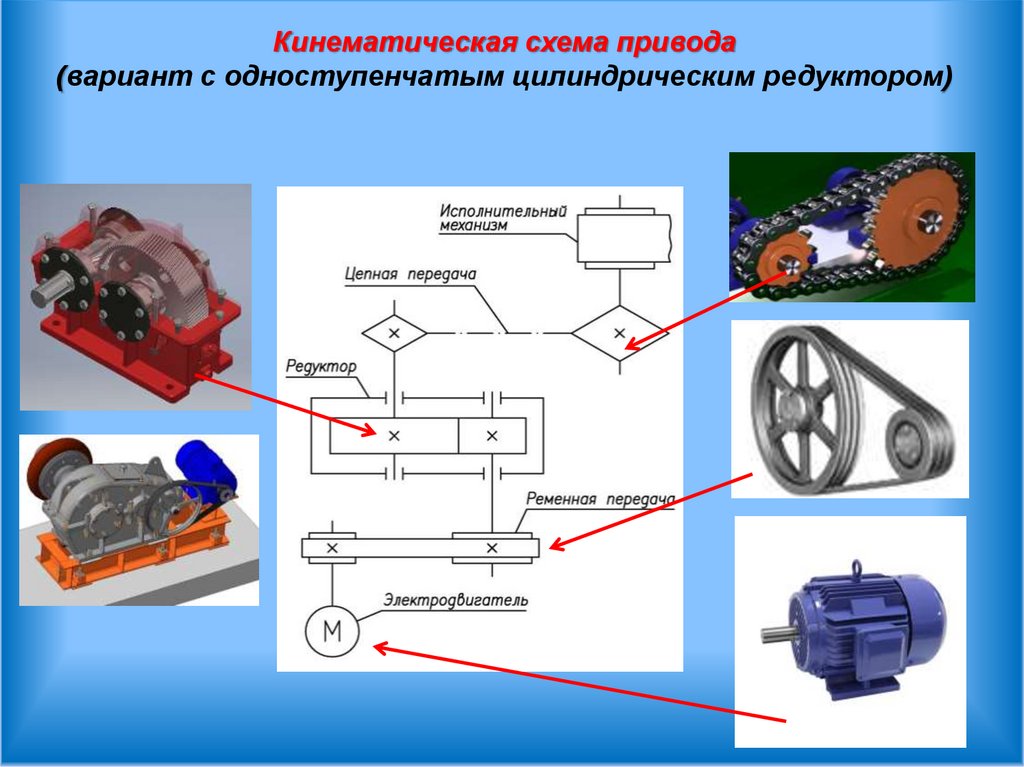
Кинематическая схема привода(вариант с одноступенчатым цилиндрическим редуктором)
14.
Кинематическая схема привода(вариант с одноступенчатым коническим редуктором)
15.
Кинематическая схема привода(варианты с двухступенчатыми редукторами)
вариант с
двухступенчатым
цилиндрическим
редуктором
вариант с
двухступенчатым
коническоцилиндрическим
редуктором
16.
В механической передаче звенья, передающие вращающий момент,
называются ведущими, воспринимающие – ведомыми.
• Параметры передачи, относящиеся
к ведущим звеньям, обозначаются нечетным индексом (1),
к ведомым звеньям – четным индексом (2).
17.
Основные характеристики механических передачХарактеристика передачи
мощность на валу , кВт
частота вращения, об/мин
угловая скорость, рад/с
вращающий момент, Нм
передаточное число
механический КПД
Обозначение на
ведущем валу
Обозначение на
ведомом валу
18.
Основные характеристики механических передачПередаточным отношением называют отношение угловых
скоростей или частот вращения входного звена (1) механизма по
отношению к выходному (2).