



















 mechanics
mechanicsSimilar presentations:










Энергетический и кинематический расчеты привода
1. Энергетический и кинематический расчеты привода
2. Цель работы:
анализ кинематической схемы и выбор электродвигателя3. Кинематические схемы приводов можно условно отнести к одному из четырех типов:
• тип А: электродвигатель – муфта – редуктор – муфта – приводной вал;• тип Б: электродвигатель – муфта – редуктор – открытая передача –
приводной вал;
• тип В: электродвигатель – открытая передача – редуктор – муфта –
приводной вал;
• тип Г: электродвигатель – открытая передача – редуктор – открытая
передача –приводной вал.
4. Таблица 1 Принятые во всех расчётных формулах обозначения физических величин и их размерности
P – мощность, кВтη – коэффициент полезного действия
T – вращающий момент, H м
Ft – окружная сила, H
V – окружная скорость, м/с
n – круговая частота вращения, мин –1
ω – угловая скорость, с –1
i – передаточное отношение
d – диаметр вала, мм
l – длина вала, мм
D – диаметр (делительный) барабана
(звёздочки или зубчатого колеса)
исполнительного звена привода, мм
p – шаг тяговой цепи, мм
z – число зубьев тяговой звёздочки
5. Индексы
Таблица 2Индексы
ЭД – электродвигатель
ЗЦ – зубчатая цилиндрическая
передача
ЗК – зубчатая коническая передача
Ч – червячная передача
Ц – цепная передача
ЗР – зубчаторемённая передача
КР – клиноремённая передача
Р – плоскоремённая передача
М – муфта
ОП – открытая передача
ПО – пара подшипниковых опор
РЕД – редуктор
Б – быстроходный вал (ступень)
Т – тихоходный вал (ступень)
ПР – промежуточный вал (ступень)
ВЫХ – выходной вал привода
j – индекс вала привода
НОМ – номинальное значение
МАКС – максимальное значение
ТР – требуемое значение
ОБЩ – общее
С – синхронная
6.
7. Исходными данными технического задания являются требуемые параметры движения вала
8. Расчетные формулы:
9. Если не задан делительный диаметр D, то рассчитывается:
10. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ ПРИВОДА МАШИНЫ Рекомендуется использовать трёхфазные асинхронные двигатели переменного тока серии АИР
11.
Таблица 3Основные размеры электродвигателей серии АИР исполнения IM1081
12.
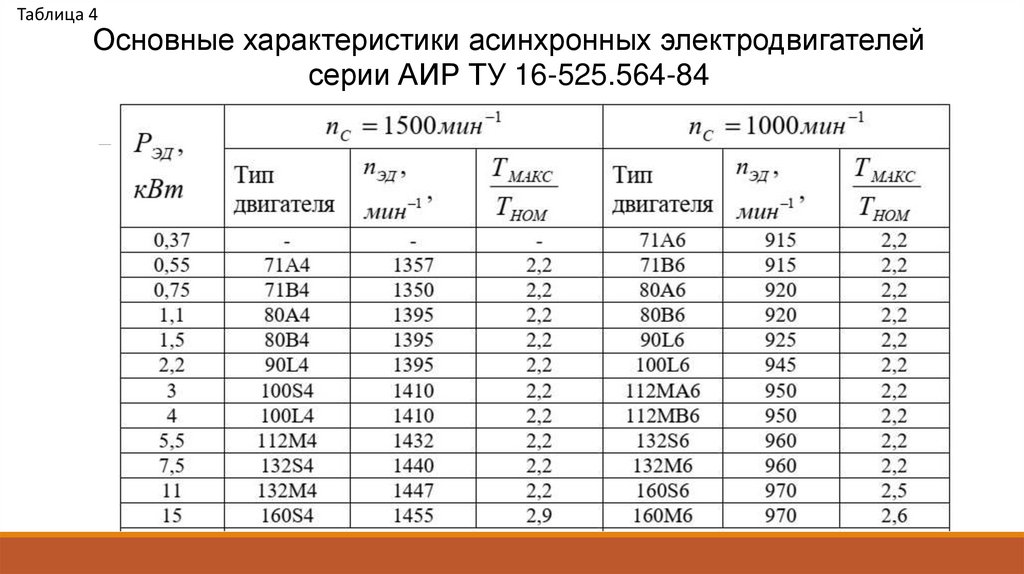
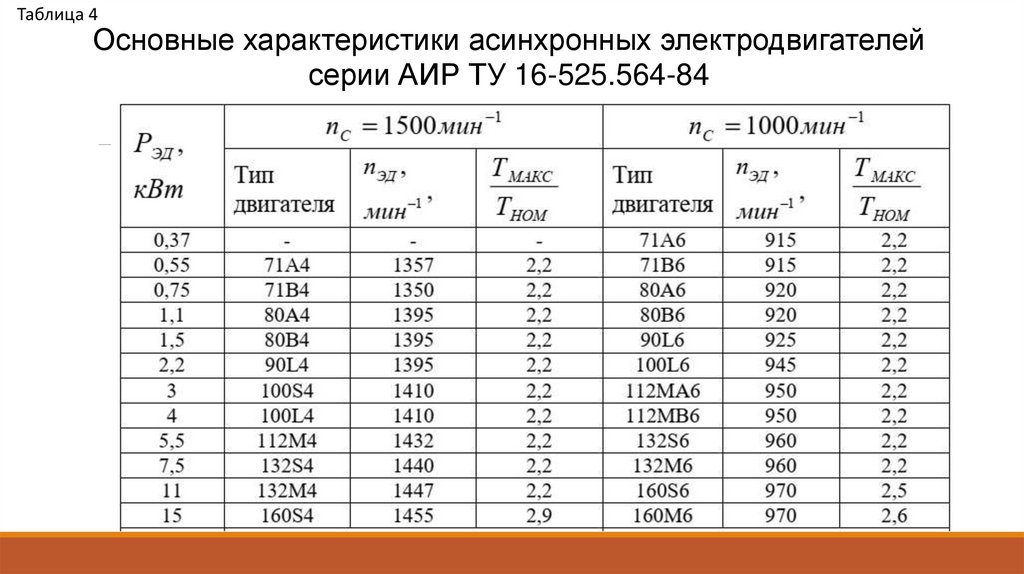
Таблица 4Основные характеристики асинхронных электродвигателей
серии АИР ТУ 16-525.564-84
13.
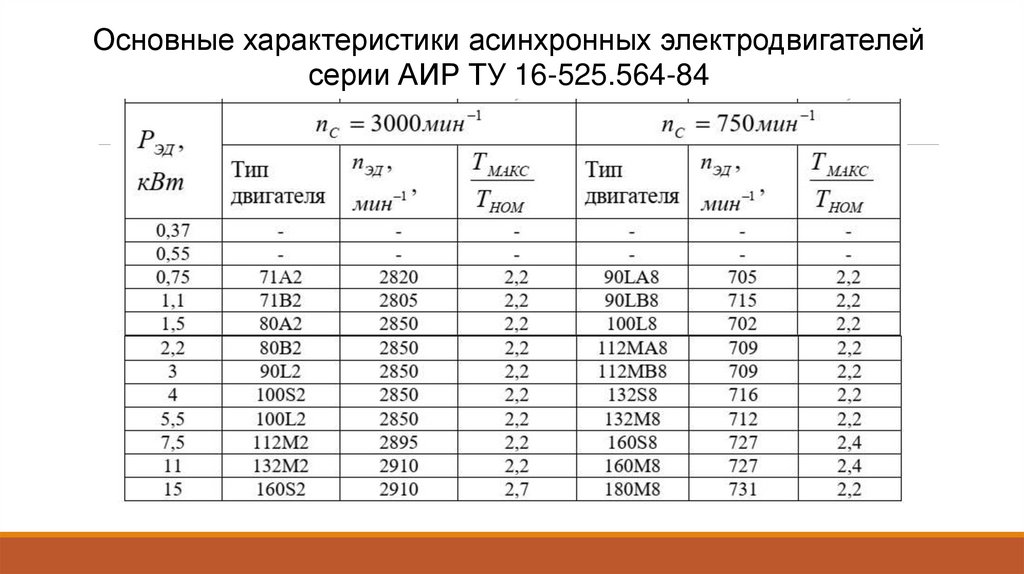
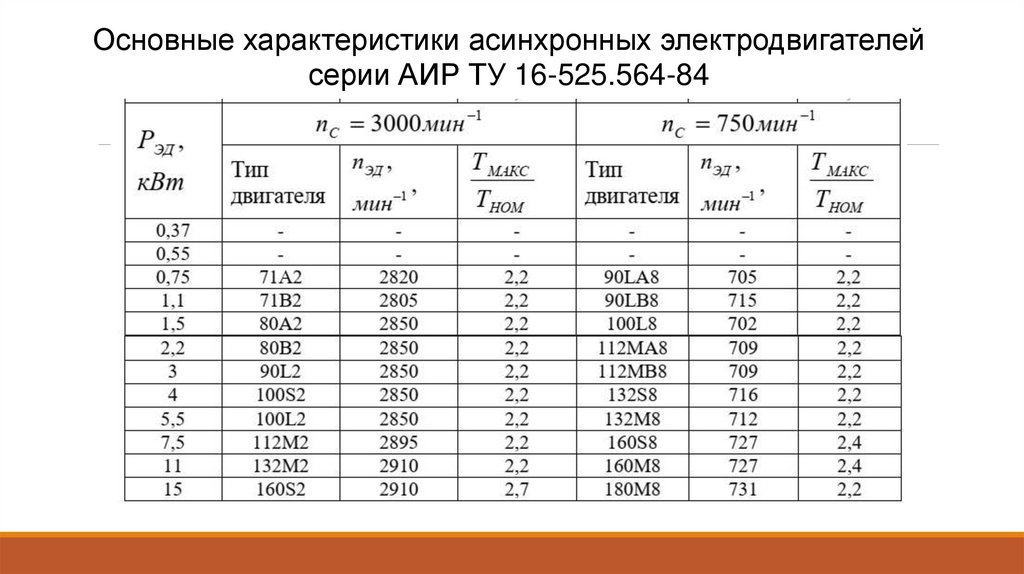
Основные характеристики асинхронных электродвигателейсерии АИР ТУ 16-525.564-84
14.
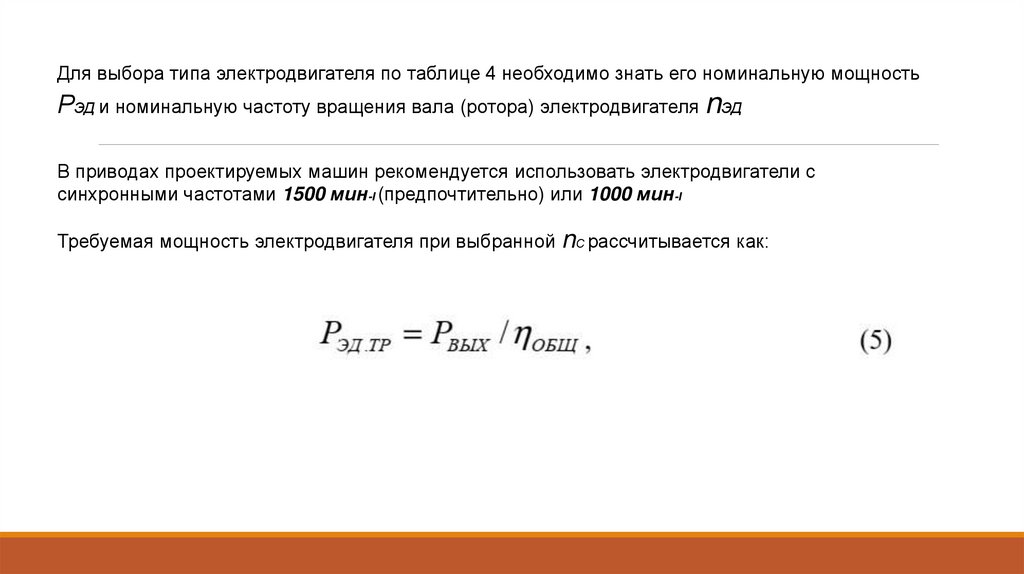
Для выбора типа электродвигателя по таблице 4 необходимо знать его номинальную мощностьРЭД и номинальную частоту вращения вала (ротора) электродвигателя nЭД
В приводах проектируемых машин рекомендуется использовать электродвигатели с
синхронными частотами 1500 мин-I (предпочтительно) или 1000 мин-I
Требуемая мощность электродвигателя при выбранной nС рассчитывается как:
15.
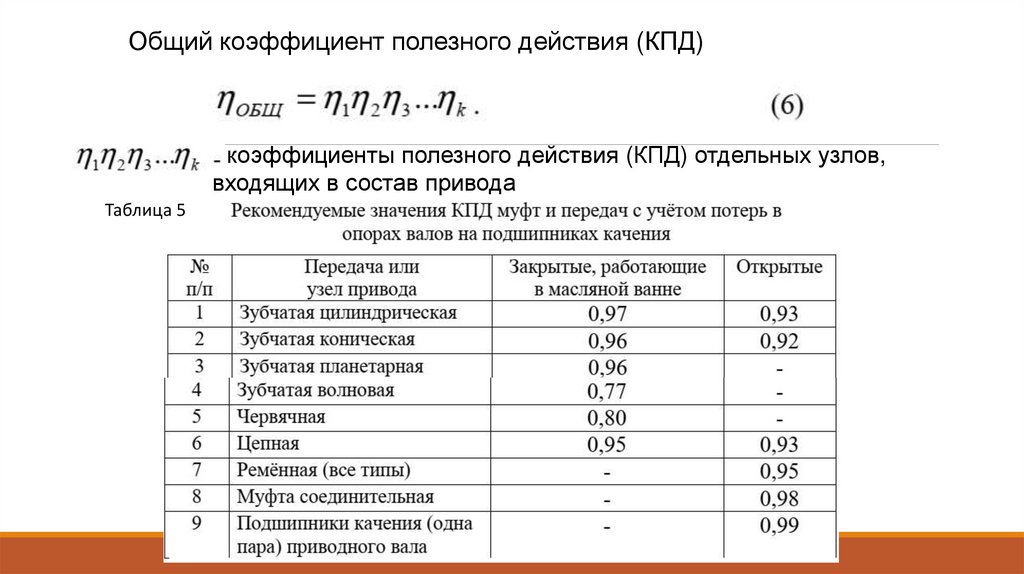
Общий коэффициент полезного действия (КПД)- коэффициенты полезного действия (КПД) отдельных узлов,
входящих в состав привода
Таблица 5
16.
Подбирают стандартный электродвигатель по таблице 4 из условият.е. с ближайшим большим значением мощности.
После этого для выбранного типа электродвигателя из таблицы 4 выписывают его обозначение ,
например, АИР100S4, и значения основных параметров: РЭД ,кВт ; nЭД , мин-1; ТМАКС /ТНОМ .
Дополнительно определяют все геометрические характеристики электродвигателя, необходимые
для дальнейших расчетов и проектирования узлов привода.
17.
ОПРЕДЕЛЕНИЕ ОБЩЕГО ПЕРЕДАТОЧНОГО ОТНОШЕНИЯПРИВОДА И РАЗБИВКА ЕГО ПО СТУПЕНЯМ
1. Определение общего передаточного отношения привода
2. Определение передаточных отношений звеньев привода
Общее передаточное отношение привода равно произведению передаточных
отношений входящих в его состав кинематических пар (ступеней), т.е.
18.
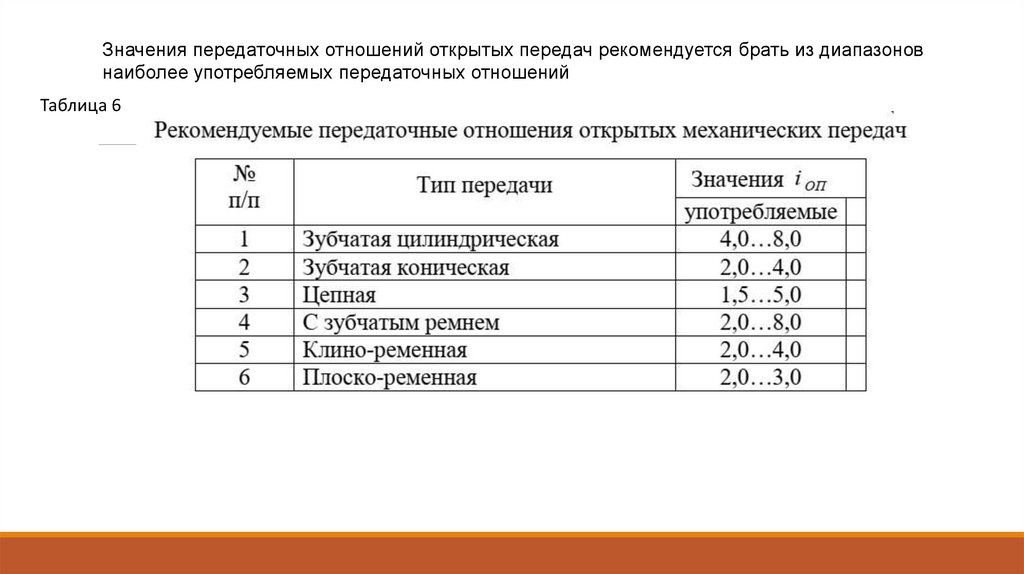
Значения передаточных отношений открытых передач рекомендуется брать из диапазоновнаиболее употребляемых передаточных отношений
Таблица 6
19.
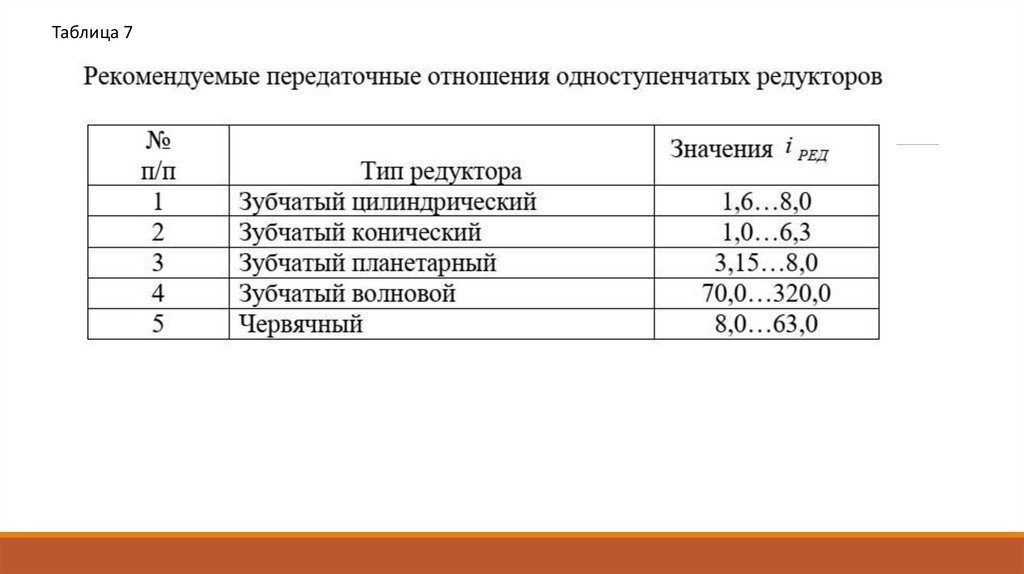
Тогда iРЕД определяется какЕсли передаточное отношение редуктора превышает рекомендуемые для данного типа
редуктора значения (таблицы 7, 8), то следует или увеличить значение iОП (в пределах
рекомендаций табл. 6), или выбрать электродвигатель с меньшей частотой nС
20.
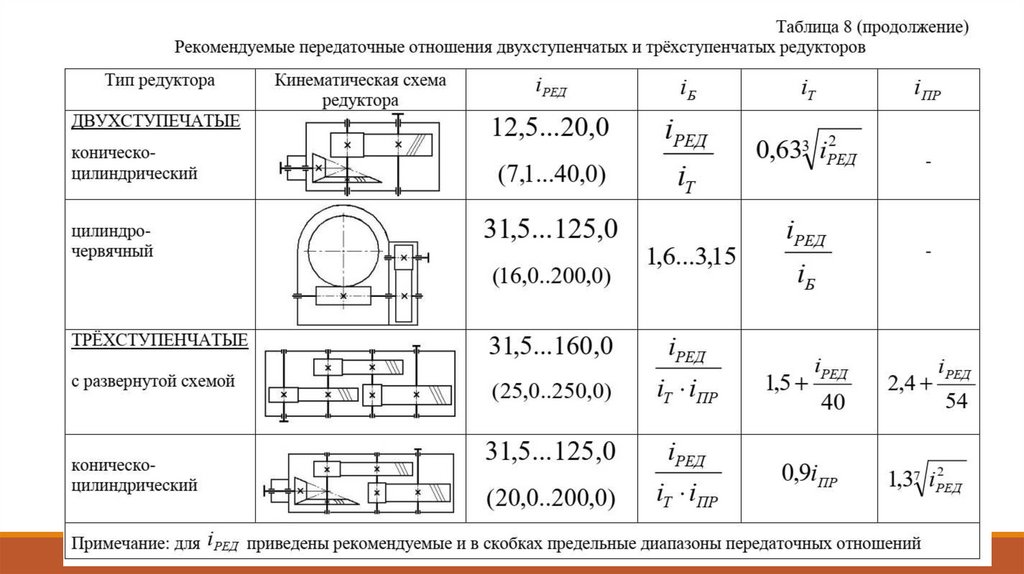
Таблица 721.
22.
23.
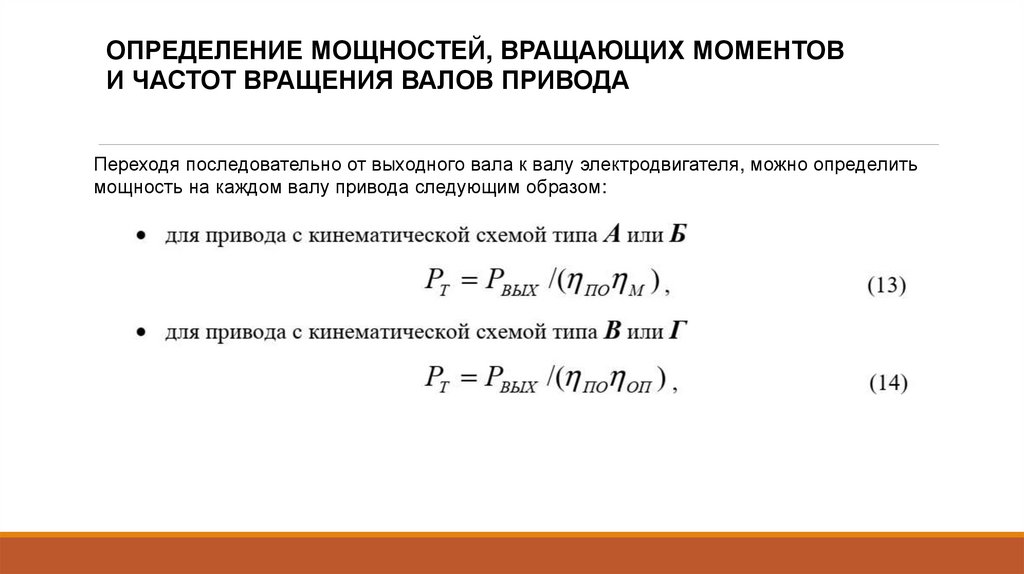
ОПРЕДЕЛЕНИЕ МОЩНОСТЕЙ, ВРАЩАЮЩИХ МОМЕНТОВИ ЧАСТОТ ВРАЩЕНИЯ ВАЛОВ ПРИВОДА
Переходя последовательно от выходного вала к валу электродвигателя, можно определить
мощность на каждом валу привода следующим образом:
24.
25.
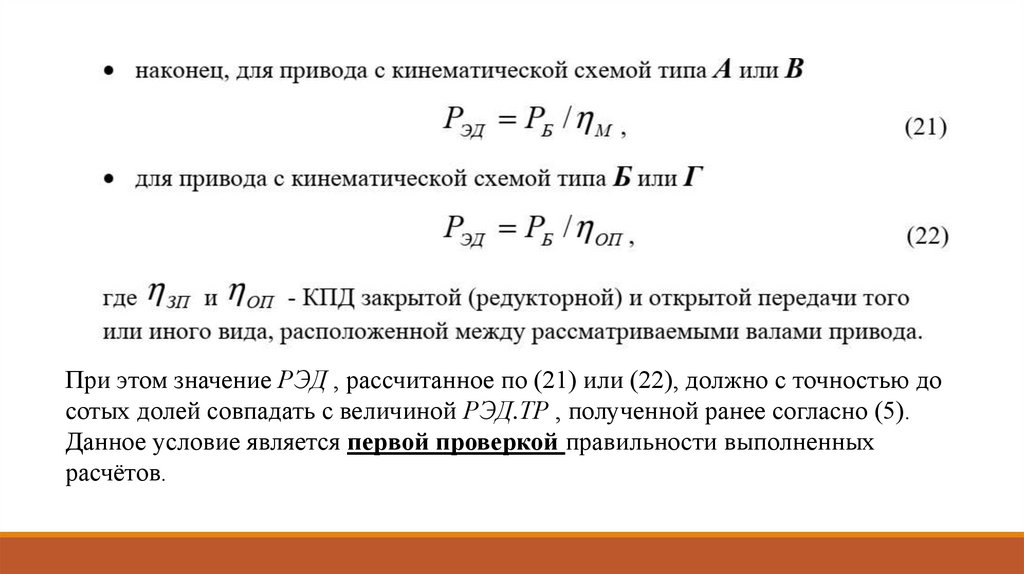
При этом значение PЭД , рассчитанное по (21) или (22), должно с точностью досотых долей совпадать с величиной PЭД.ТР , полученной ранее согласно (5).
Данное условие является первой проверкой правильности выполненных
расчётов.
26.
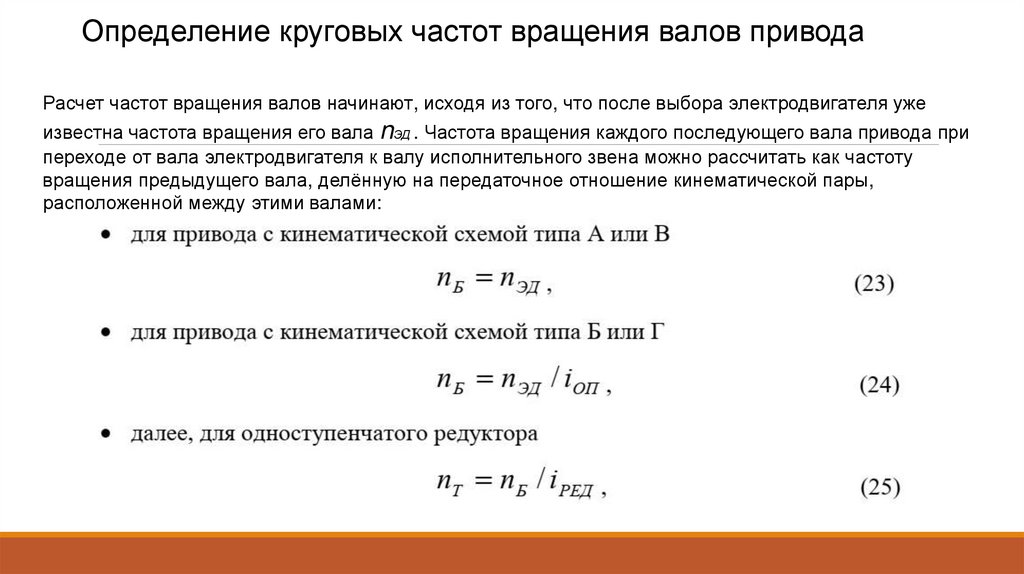
Определение круговых частот вращения валов приводаРасчет частот вращения валов начинают, исходя из того, что после выбора электродвигателя уже
известна частота вращения его вала nЭД . Частота вращения каждого последующего вала привода при
переходе от вала электродвигателя к валу исполнительного звена можно рассчитать как частоту
вращения предыдущего вала, делённую на передаточное отношение кинематической пары,
расположенной между этими валами:
27.
28.
Частота вращения выходного вала привода, полученная в результатеэтого расчета по (31) или (32), должна совпадать с величиной nВЫХ ,
определенной ранее по формуле (2) с точностью до сотых долей. Это условие
является второй проверкой правильности выполненных расчётов.
Определение вращающих моментов на валах привода
29.
МИРЭАКафедра «ПИ»
Студент……………………..
группа……… дата
Проверил……………………..
ЛАБОРАТОРНАЯ РАБОТА №1
«Энергетический и кинематический расчеты привода»
Цель работы: анализ кинематической схемы и выбор электродвигателя
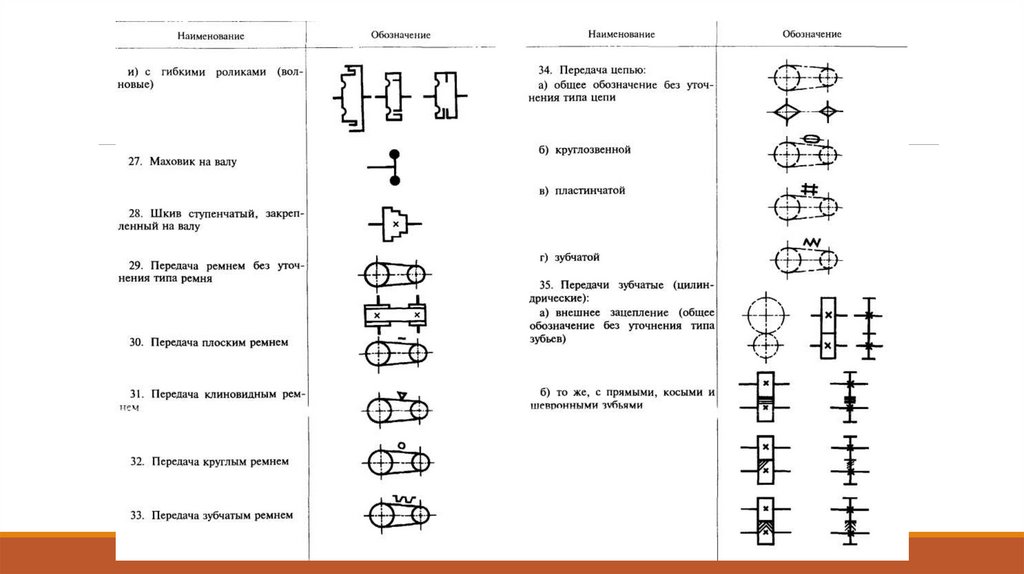
Типы существующих кинематических схем:
Условие
Последовательность решения
1.Определить тип заданной схемы и перечислить входящие в ее состав узлы.
2.Уточнить характеристики исполнительного звена (выходного вала). Вычисляем требуемую мощность на выходе привода.
3.Расчет общего КПД привода.
4.Определить требуемую мощность электродвигателя.
5.Выбор электродвигателя с указанием параметров.
6.Рассчитать общее передаточное отношение привода.
7.Проверка со стандартными значениями передаточного отношения электропривода, при необходимости выбор другого
8.Определить мощности на валах привода.
9.Проверка с исходными данными.
10.Определяем вращающие моменты на
валах привода.
30.
31.
32.
33.
34.
35.
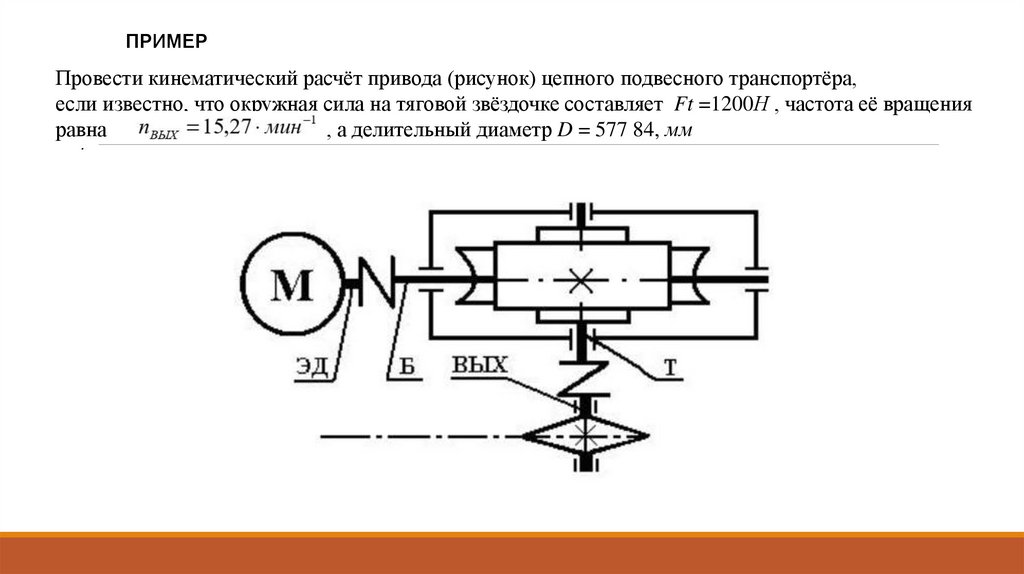
ПРИМЕРПровести кинематический расчёт привода (рисунок) цепного подвесного транспортёра,
если известно, что окружная сила на тяговой звёздочке составляет Ft =1200Н , частота её вращения
равна
, а делительный диаметр D = 577 84, мм
.
36.
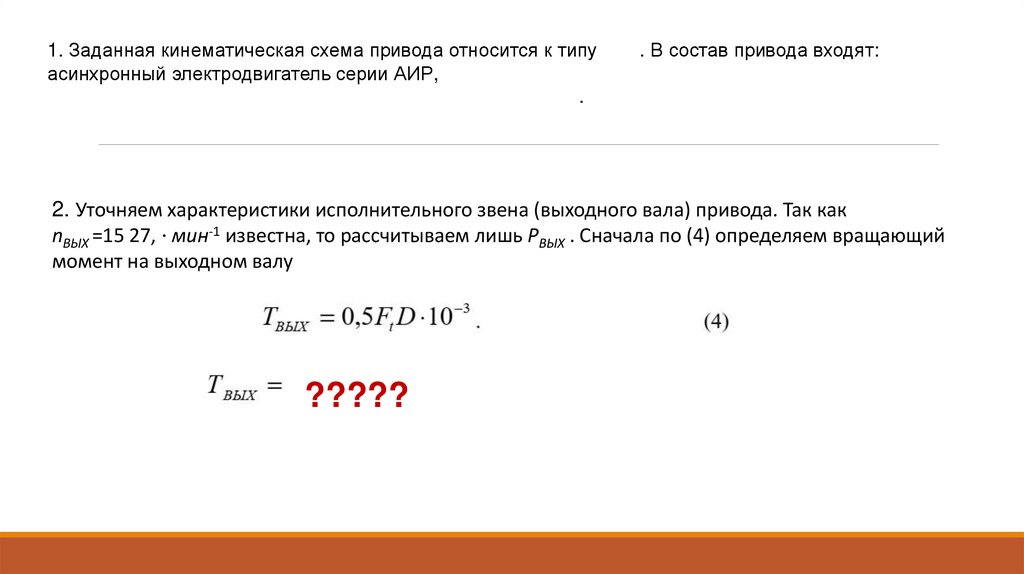
1. Заданная кинематическая схема привода относится к типу А. В состав привода входят:асинхронный электродвигатель серии АИР, две упругие компенсирующие муфты, одноступенчатый
червячный редуктор и приводной вал с тяговой звёздочкой.
2. Уточняем характеристики исполнительного звена (выходного вала) привода. Так как
nВЫХ =15 27, ⋅ мин-1 известна, то рассчитываем лишь PВЫХ . Сначала по (4) определяем вращающий
момент на выходном валу
?????
37.
Затем согласно (1) вычисляем требуемую мощность на выходе привода38.
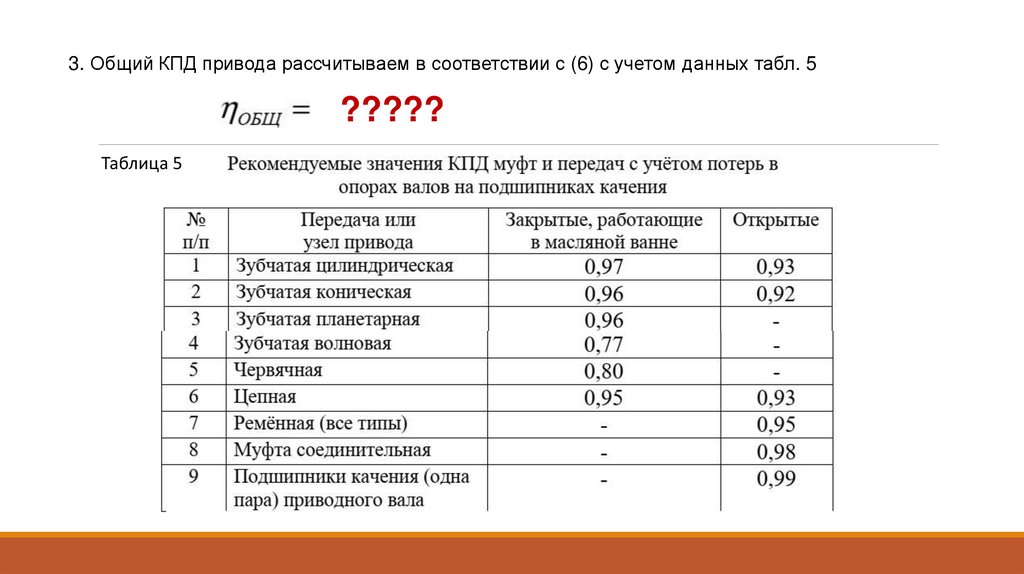
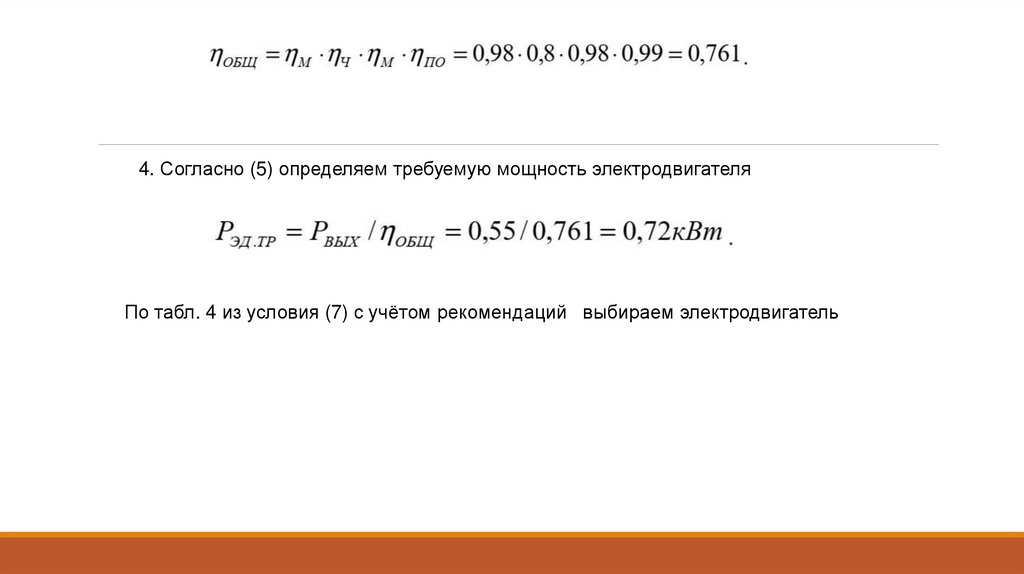
3. Общий КПД привода рассчитываем в соответствии с (6) с учетом данных табл. 5?????
Таблица 5
39.
4. Согласно (5) определяем требуемую мощность электродвигателяПо табл. 4 из условия (7) с учётом рекомендаций выбираем электродвигатель
40.
Таблица 4Основные характеристики асинхронных электродвигателей
серии АИР ТУ 16-525.564-84
41.
Основные характеристики асинхронных электродвигателейсерии АИР ТУ 16-525.564-84
42.
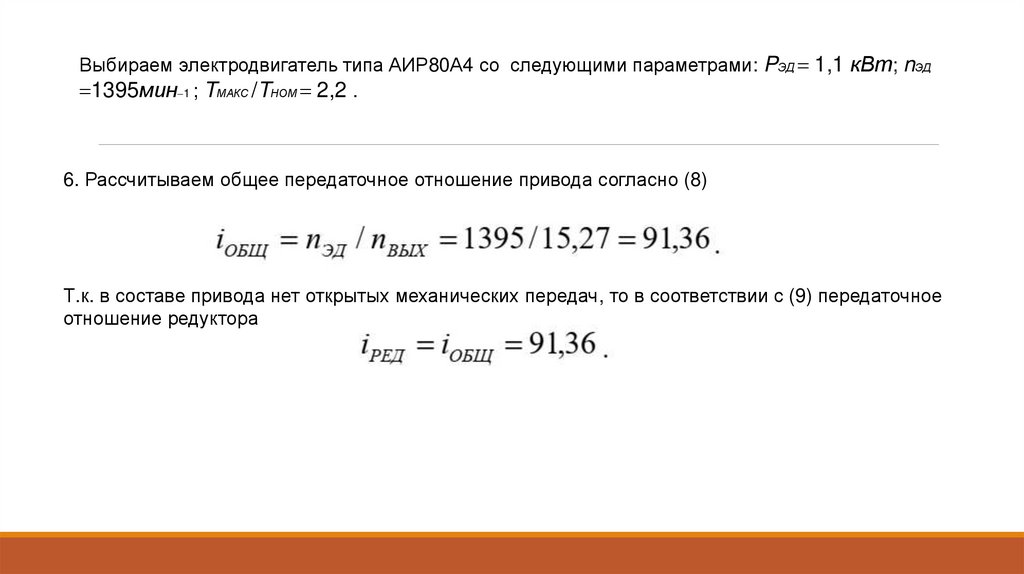
Выбираем электродвигатель типа АИР80А4 со следующими параметрами: PЭД = 1,1 кВт; nЭД=1395мин-1 ; TМАКС /TНОМ = 2,2 .
6. Рассчитываем общее передаточное отношение привода согласно (8)
Т.к. в составе привода нет открытых механических передач, то в соответствии с (9) передаточное
отношение редуктора
43.
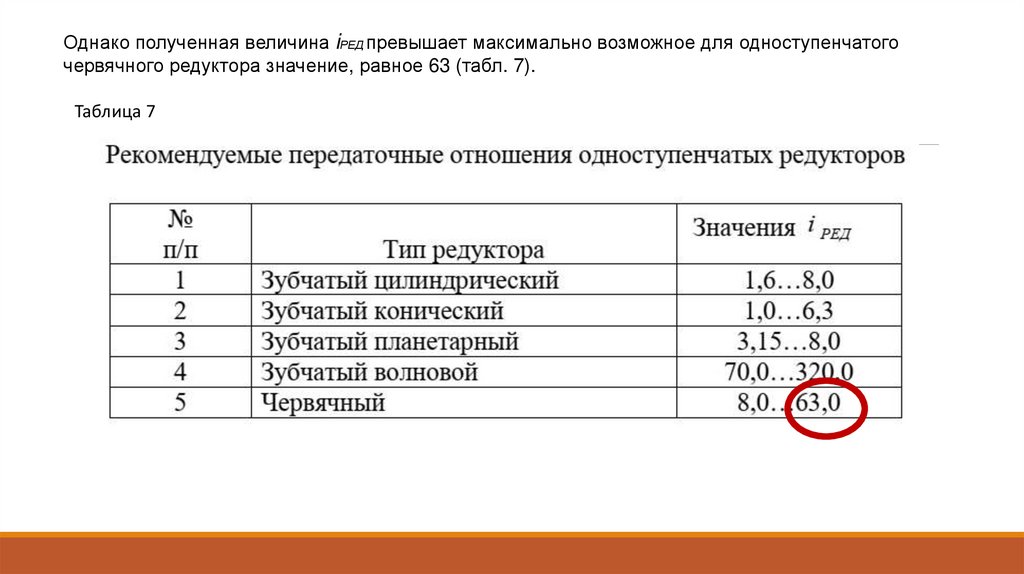
Однако полученная величина iРЕД превышает максимально возможное для одноступенчатогочервячного редуктора значение, равное 63 (табл. 7).
Таблица 7
44.
7. Тогда выбираем, используя табл. 3, другой электродвигатель с той же мощностью, но с меньшейnС , имеющий следующие параметры: тип электродвигателя АИР80В6, P ЭД = 1,1кВт , nЭД =
920мин-1, Тмакс /Тном = 2,2 , и после перерасчёта (п. 6) имеем
удовлетворяющее рекомендациям табл. 7.
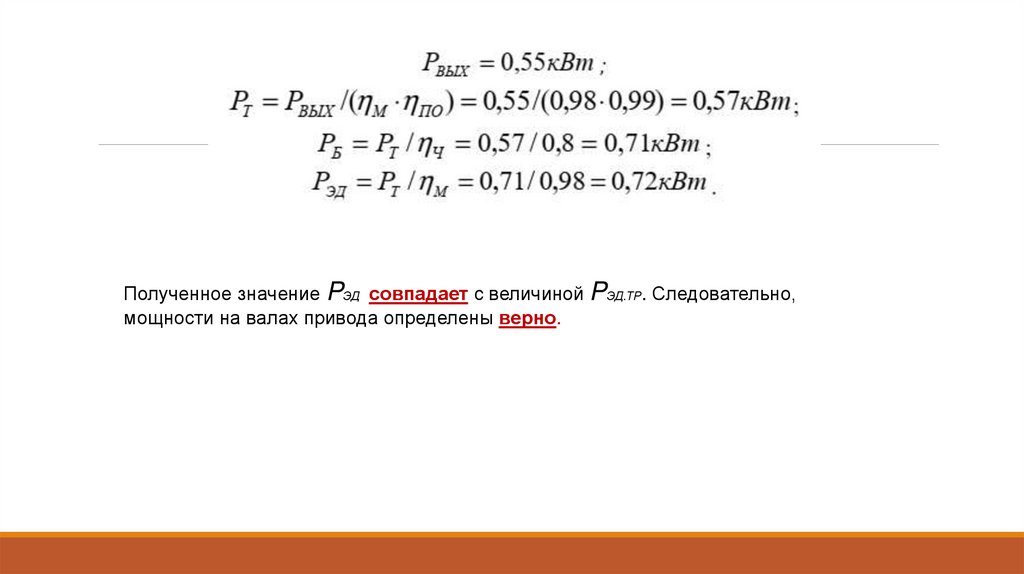
8. По формулам (13, 15, 21) определяем мощности на валах привода
?????
?????
?????
45.
Полученное значение PЭД совпадает с величиной PЭД.ТР. Следовательно,мощности на валах привода определены верно.
46.
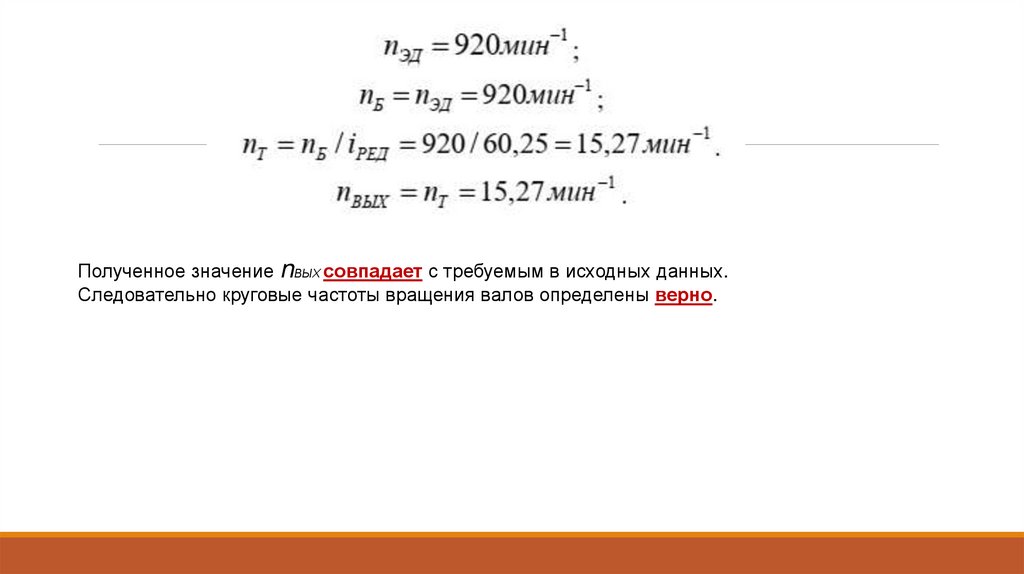
9. По формулам (23, 25, 31) рассчитываем круговые частоты вращениявалов
????
????
????
47.
Полученное значение nВЫХ совпадает с требуемым в исходных данных.Следовательно круговые частоты вращения валов определены верно.
48.
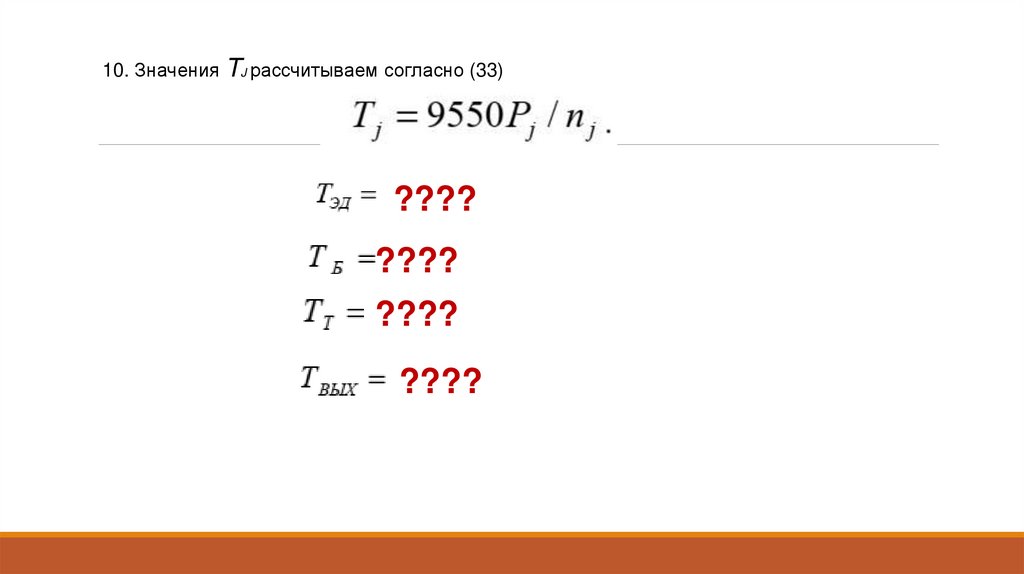
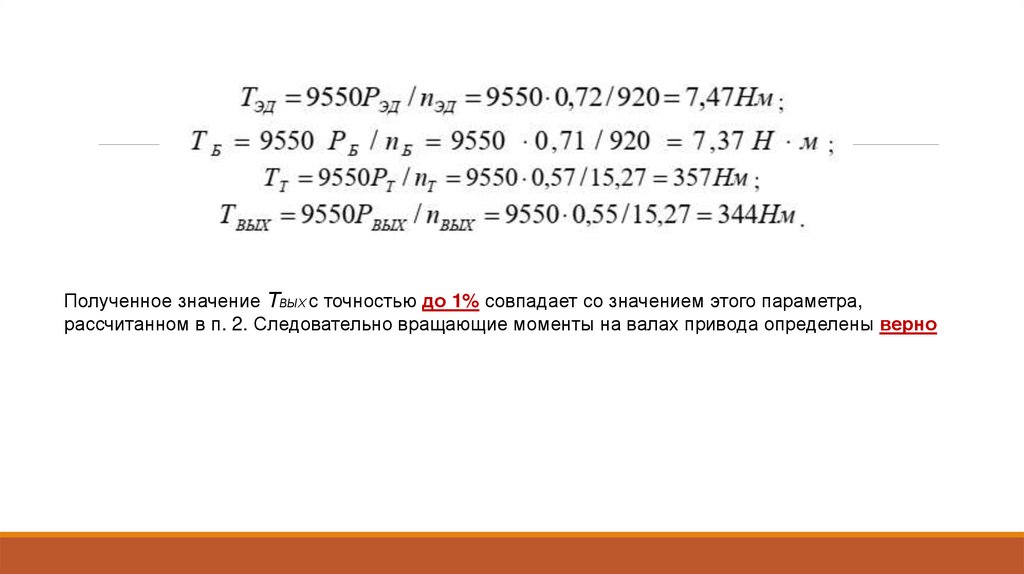
10. Значения TJ рассчитываем согласно (33)????
????
????
????
49.
Полученное значение ТВЫХ с точностью до 1% совпадает со значением этого параметра,рассчитанном в п. 2. Следовательно вращающие моменты на валах привода определены верно