 mathematics
mathematicsSimilar presentations:









")
Математическое описание объектов и систем управления
1.
Математическое описаниеобъектов и систем управления
2.
Типы уравнений и объектовУравнения, описывающие зависимость координат объекта и всех элементов системы от
входных воздействий, а также структурная схема системы, составляют математическую
модель системы.
Уравнения могут быть алгебраическими, трансцендентными, дифференциальными,
интегральными, конечно-разностными и т.д. В общем случае уравнение можно записать в
виде:
F ( X ( n ) , X ( n 1 ) ,...X ,U ( m ) ,U ( m 1 ) ,...U , Z ( l ) , Z ( l 1 ) ,...Z ) 0
XU
Z
- вектор координат объекта
- управляющее воздействие;
- возмущающее воздействие.
Данное уравнение, связывающее координаты объекта, а также их производные и
воздействия называют уравнением динамики.
Если все производные равны нулю, то уравнение превращается в уравнение статики .
Уравнения статики описывают либо безинерционные объекты, либо инерционные в
установившемся состоянии при постоянных входных воздействиях.
Уравнение статики связывает только текущие координаты и воздействия.
Если функция F линейная, то и система называется линейной.
3.
Объекты, системы, звенья4.
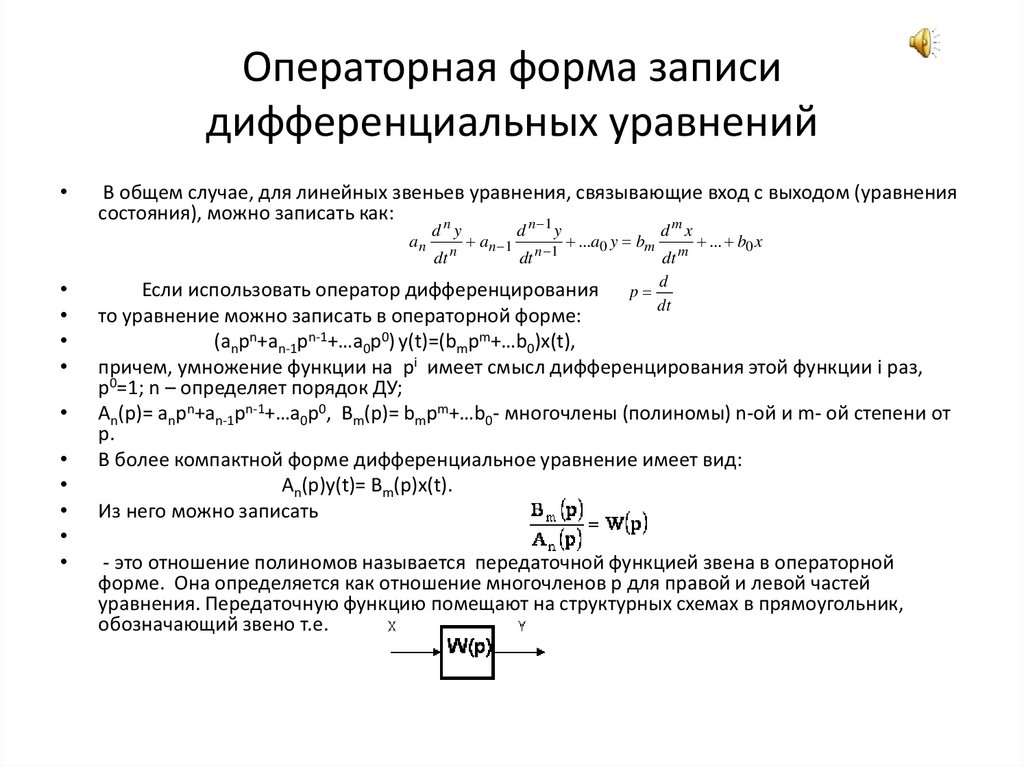
Операторная форма записидифференциальных уравнений
В общем случае, для линейных звеньев уравнения, связывающие вход с выходом (уравнения
состояния), можно записать как:
n
n 1
m
an
d y
dt n
an 1
d
y
dt n 1
...a0 y bm
d x
dt m
d
p
dt
... b0 x
Если использовать оператор дифференцирования
то уравнение можно записать в операторной форме:
(anpn+an-1pn-1+…a0p0) y(t)=(bmpm+…b0)x(t),
причем, умножение функции на pi имеет смысл дифференцирования этой функции i раз,
p0=1; n – определяет порядок ДУ;
An(p)= anpn+an-1pn-1+…a0p0, Bm(p)= bmpm+…b0- многочлены (полиномы) n-ой и m- ой степени от
p.
В более компактной форме дифференциальное уравнение имеет вид:
An(p)y(t)= Bm(p)x(t).
Из него можно записать
- это отношение полиномов называется передаточной функцией звена в операторной
форме. Она определяется как отношение многочленов p для правой и левой частей
уравнения. Передаточную функцию помещают на структурных схемах в прямоугольник,
обозначающий звено т.е.
5.
Передаточная функция в операторной формеОператорная форма записи дифференциальных уравнений и передаточная функция
используются для более компактной записи математической модели звена, особенно
для сложных уравнений, в частности, если объект подвержен воздействию управления
и возмущения, то в операторной форме это будет
An(p)y(t)= Bm(p)U(t)+Cl(p)z(t),
Или
,
или
y(t)=Wyu(p)u(t)+Wyz(p)z(t),
где
- передаточная функция объекта от управления к выходу,
-
- передаточная функция объекта от возмущения к выходу.
Помимо передаточной функции в операторной форме в теории управления
используется также передаточная функция в изображениях по Лапласу – это
отношение выхода элемента ко входу в изображениях по Лапласу,
Y( s )
полученных при нулевых начальных условиях: W ( s )
.
U( s )
6.
Преобразования ЛапласаДля функции f(t), дифференцируемой на интервале времени от 0 до ∞ и ограниченной по
модулю (|f(t)|≤Mect), изображением по Лапласу является функция F(s), полученная как:
F ( s ) f ( t )e st dt
0
где M, c – конечные значения , s- комплексная переменная Лапласа, s=σ+jω.
Функция f(t) называется оригиналом, функция F(s) – изображением.
Преобразования Лапласа обозначаются также символом L:
Свойства преобразований Лапласа
1. Преобразование Лапласа является линейной операцией
[ f1( t ) f 2 ( t ) ] e
st
dt L{ f1( t ) f 2 ( t )} F1( s ) F2 ( s )
0
и L{сf(t)}=сF(s), с=const.
2. Обратное преобразование задается интегралом
0 при t 0
1 j
st ,
1
t
f (t )
F
(
s
)
e
ds
1
(
t
)
2 j j
1 при t 0
(функция f(t) лежит в положительной области времени).
7.
Свойства преобразований Лапласа3. Дифференцирование оригинала:
4. Интегрирование оригинала:
5. Правила предельного перехода:
6. Умножение изображений
L{
df
} sF ( s ) f ( 0 )
dt
f ( 0 ) lim f ( t )
t 0
, где
di f
(i )
(n)
n
n-1
n-2
n-1
и L{f (t)}=s F(s)-s f(0)-s f`-…..-f (0), где f ( 0 ) lim i
t 0 dt
L{ f ( )d }
F( s )
s
lim f ( t ) lim F ( s )s
t
t
и
s 0
lim f ( t ) lim F ( s )s
t 0
s
t
L 1{ F1( s )F2 ( s )} f1( t ) * f 2 ( t ) f1( t ) * f 2 ( )d f1( ) f 2 ( t )d
0
0
• -интеграл свертки.
Верхний предел интеграла может быть равен ∞, нижний -∞, т.к функции f1 и f2
для отрицательного аргумента должны быть равны нулю.
• 7. Смещение аргумента оригинала
L{f(t-τ)}=F(s)e-sτ
8.
Обратное преобразование Лапласа спомощью формул вычетов
• 8. Теорема о разложении или теорема о вычетах:
B (s)
Если F ( s ) Am( s ) есть дробно-рациональная функция, причем, m<n,
n
то
n 1
j
1
k
lim F ( s )
[F(s)(s - s k ) n k e st ]
n
1
s k
k 1 ( nk 1 )! s s k
f ( t ) 1( t )*
• где, j- количество различных корней; nk-число повторений к-го корня;
• sk- корни уравнения An(s)=0.
n
B (s)
• Если все корни разные, то
,
f ( t ) 1( t )* lim m e st
'
k 1 s s k An ( s )
9.
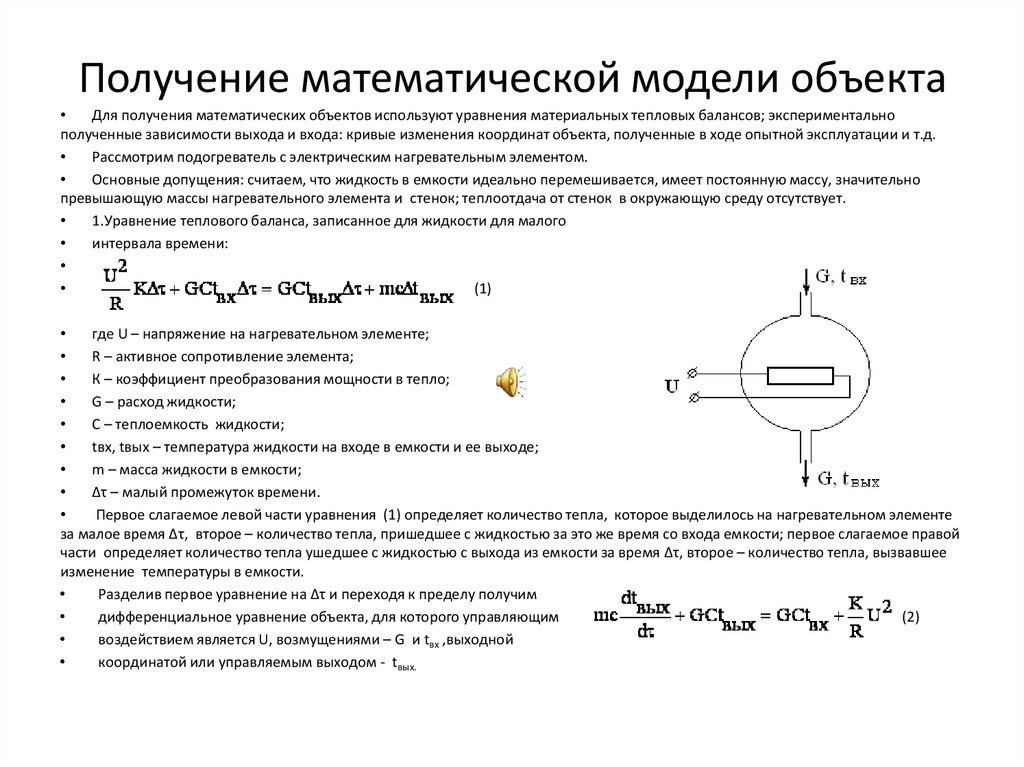
Получение математической модели объектаДля получения математических объектов используют уравнения материальных тепловых балансов; экспериментально
полученные зависимости выхода и входа: кривые изменения координат объекта, полученные в ходе опытной эксплуатации и т.д.
Рассмотрим подогреватель с электрическим нагревательным элементом.
Основные допущения: считаем, что жидкость в емкости идеально перемешивается, имеет постоянную массу, значительно
превышающую массы нагревательного элемента и стенок; теплоотдача от стенок в окружающую среду отсутствует.
1.Уравнение теплового баланса, записанное для жидкости для малого
интервала времени:
(1)
где U – напряжение на нагревательном элементе;
R – активное сопротивление элемента;
К – коэффициент преобразования мощности в тепло;
G – расход жидкости;
С – теплоемкость жидкости;
tвх, tвых – температура жидкости на входе в емкости и ее выходе;
m – масса жидкости в емкости;
∆τ – малый промежуток времени.
Первое слагаемое левой части уравнения (1) определяет количество тепла, которое выделилось на нагревательном элементе
за малое время ∆τ, второе – количество тепла, пришедшее с жидкостью за это же время со входа емкости; первое слагаемое правой
части определяет количество тепла ушедшее с жидкостью с выхода из емкости за время ∆τ, второе – количество тепла, вызвавшее
изменение температуры в емкости.
Разделив первое уравнение на Δτ и переходя к пределу получим
дифференциальное уравнение объекта, для которого управляющим
(2)
воздействием является U, возмущениями – G и tвх ,выходной
координатой или управляемым выходом - tвых.
10.
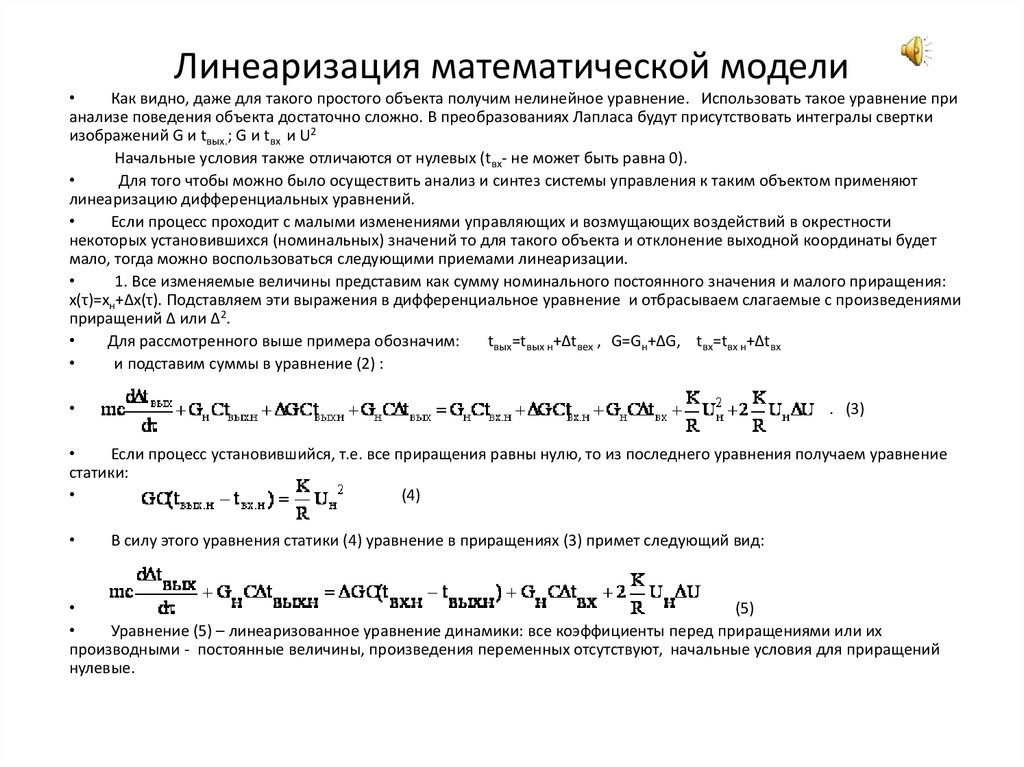
Линеаризация математической моделиКак видно, даже для такого простого объекта получим нелинейное уравнение. Использовать такое уравнение при
анализе поведения объекта достаточно сложно. В преобразованиях Лапласа будут присутствовать интегралы свертки
изображений G и tвых.; G и tвх и U2
Начальные условия также отличаются от нулевых (tвх- не может быть равна 0).
Для того чтобы можно было осуществить анализ и синтез системы управления к таким объектом применяют
линеаризацию дифференциальных уравнений.
Если процесс проходит с малыми изменениями управляющих и возмущающих воздействий в окрестности
некоторых установившихся (номинальных) значений то для такого объекта и отклонение выходной координаты будет
мало, тогда можно воспользоваться следующими приемами линеаризации.
1. Все изменяемые величины представим как сумму номинального постоянного значения и малого приращения:
x(τ)=xн+Δx(τ). Подставляем эти выражения в дифференциальное уравнение и отбрасываем слагаемые с произведениями
приращений Δ или Δ2.
Для рассмотренного выше примера обозначим:
tвых=tвых н+Δtвех , G=Gн+ΔG, tвх=tвх н+Δtвх
и подставим суммы в уравнение (2) :
. (3)
Если процесс установившийся, т.е. все приращения равны нулю, то из последнего уравнения получаем уравнение
статики:
(4)
В силу этого уравнения статики (4) уравнение в приращениях (3) примет следующий вид:
(5)
Уравнение (5) – линеаризованное уравнение динамики: все коэффициенты перед приращениями или их
производными - постоянные величины, произведения переменных отсутствуют, начальные условия для приращений
нулевые.
11.
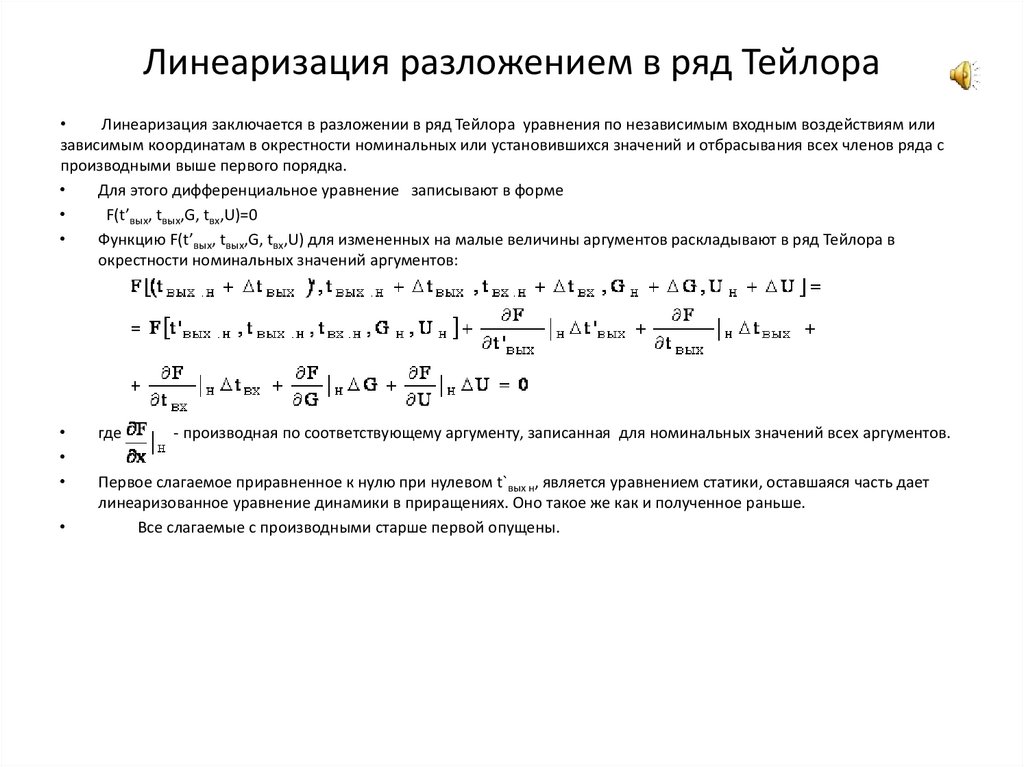
Линеаризация разложением в ряд ТейлораЛинеаризация заключается в разложении в ряд Тейлора уравнения по независимым входным воздействиям или
зависимым координатам в окрестности номинальных или установившихся значений и отбрасывания всех членов ряда с
производными выше первого порядка.
Для этого дифференциальное уравнение записывают в форме
F(t’вых, tвых,G, tвх,U)=0
Функцию F(t’вых, tвых,G, tвх,U) для измененных на малые величины аргументов раскладывают в ряд Тейлора в
окрестности номинальных значений аргументов:
где
- - производная по соответствующему аргументу, записанная для номинальных значений всех аргументов.
Первое слагаемое приравненное к нулю при нулевом t`вых н, является уравнением статики, оставшаяся часть дает
линеаризованное уравнение динамики в приращениях. Оно такое же как и полученное раньше.
Все слагаемые с производными старше первой опущены.