
















 electronics
electronicsSimilar presentations:


")







XVy-EVolution
1.
XVy-EVolution1
2.
XVy-EVolutionContinuous current
from 3Arms to 580Arms
2
3. XVy_EV naming system
XVy_EV 5100180 - KBX - PDPProfibus-DP
Option Included
Product name
ARTDriveS series
Case
size
Nominal
current (Arms)
Braking module
option
Peak
current (Arms)
By the way to have a clear identification, the new name
depends on the Rated and Overload current of the drive
3
4.
XVy-EVNEW Regulation board
• The new board won’t change any interface with the
actual one (terminals, jumpers, etc…)
• The card is replaceable with the old one (the power
section remains the same)
4
5.
XVy-EVRegulation board improvement
The microcontroller C167 with 25MHz is replaced with the more
performing processors C167CR-L33M working at 32 MHz.
This allows:
• Improvement of the power calculation and the management of more
performing and complex applications
• CanOpen baud rate at 1 Mbit
• Improvement of the SoftScope use
5
6.
XVy-EVNEW SW version
Brushless Version
• XVyBasic V4_22.sre
• XVyBasic V4_22.sre
Asyncronous Version
• XVyABasic V4_22.sre
• XVyABasic V4_22.sre
6
7.
XVy-EVNew Keypad
The keypad is the same of the actual AVy,
where are also available more navigation
Buttons:
• Start / Stop
• Disable
• Jog + and Jog –
• Motorpot + and The name is KBXV-EV
7
8.
New FW functionsAlphanumeric Keypad
• In order to make more user-friendly
the drive interface, the parameters
description is in “alphanumeric” mode.
• The parameters description is in
a single language (short technical terms in English).
File Parameter Storage
• The keypad is able to upload and download one file parameter of
the drive.
8
9.
Hardware Update• Improvements of the connection of the
absolute encoders EnDat to the expansion
card EXP-ABS-XVy.
• It is no longer necessary to double the
encoder cable.
• The full data encoder have to be connected
to the XE1 connector on the ABS card.
• The new card has a second XE2 connector
used to repeat the incremental tracks to the
standard XE connector on the regulation
board
9
10.
Hardware Update• Add a new connectors for
a fast disconnection /
connection of the braking
resistor
• Easy disconnection and
removal of the cable to
the BR1 and C terminal
10
11.
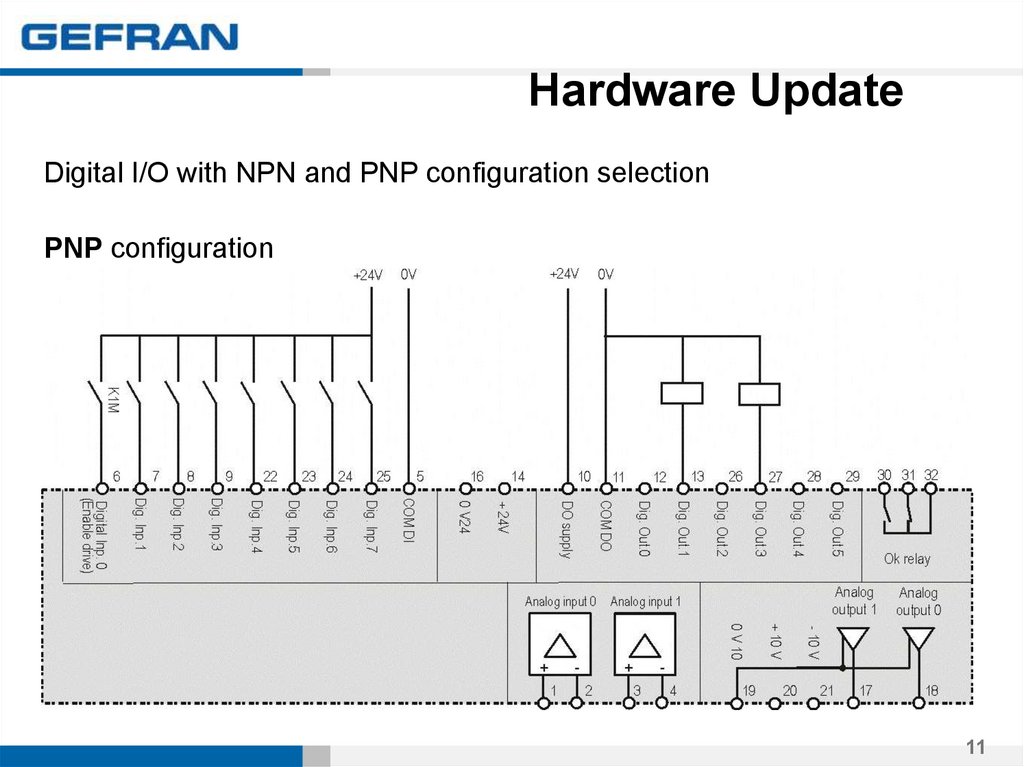
Hardware UpdateDigital I/O with NPN and PNP configuration selection
PNP configuration
11
12.
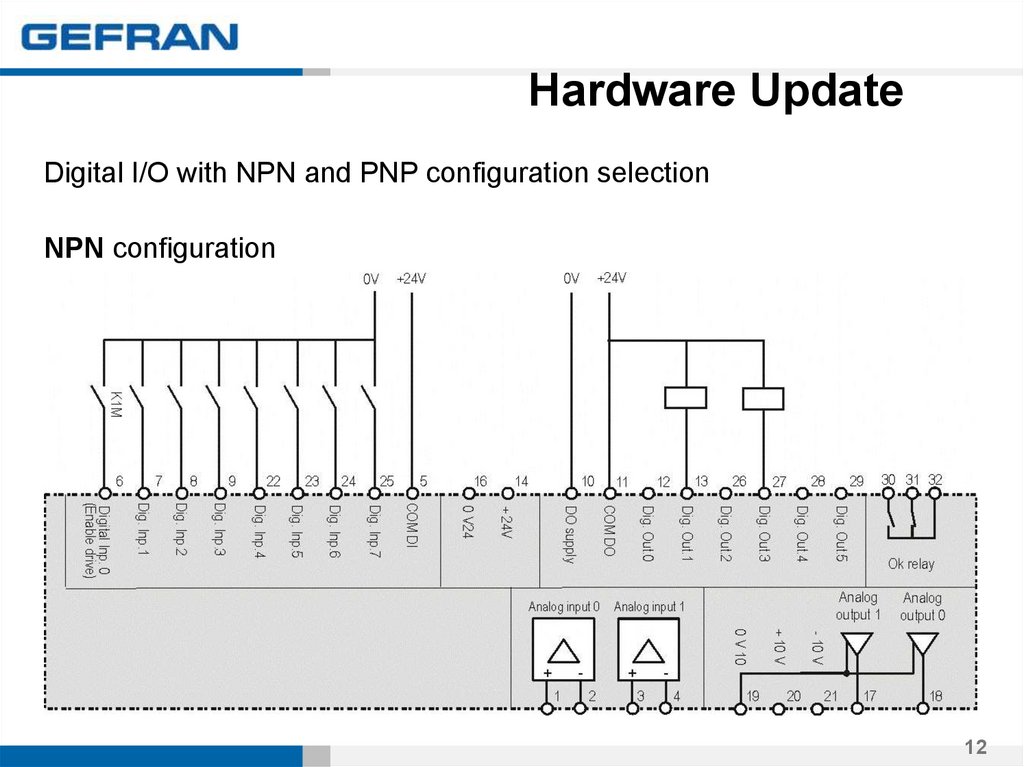
Hardware UpdateDigital I/O with NPN and PNP configuration selection
NPN configuration
12
13.
Hardware UpdateFast inputs
• Digital inputs 6 and 7 are wired as Hardware Interrupt.
They could be used to store the encoders position.
• Input 5 could be used as integrated function “Counter”.
It is able to count squared waveform max 8khz.
(positive slope, negative slope, positive and negative
slope).
• These functions
application.
are
available
only
in
MDPLC
13
14.
Hardware UpdateFast Link network
• Increased the max number of Slave from 7 to 15 (16
taking part in the net)
XVy
XVy
XVy
Master
Slave 1
Slave ..
XVy
Slave 15
14
15. Fast Link & encoder repetition can be used together.
Hardware UpdateFast Link & encoder repetition can be used together.
XVy
XVy
Section 1
Drive X
(Master)
Section 2
Drive 1
(Master)
XVy
Section 2
Drive 16
(Slave)
XVy
XVy
Section 3
Drive 1
(Master)
Section 3
Drive 16
(Slave)
15
16.
NOTE:The new FW runs only with the new
regulator board at 32 MHz.
It is not possible to perform a network
through fast-link with drive having both
25MHz and NEW 32MHz processors.
16
17.
Hardware Up-to-datingEncoder inputs
• Pull-up / down resistors added to the optional ENC-ADPT card
• Which configuration (NPN – PNP)?
17
18.
XVy-EV SIZES18
19.
New FW functionsThe XVy_EV perform two different overload algorithms:
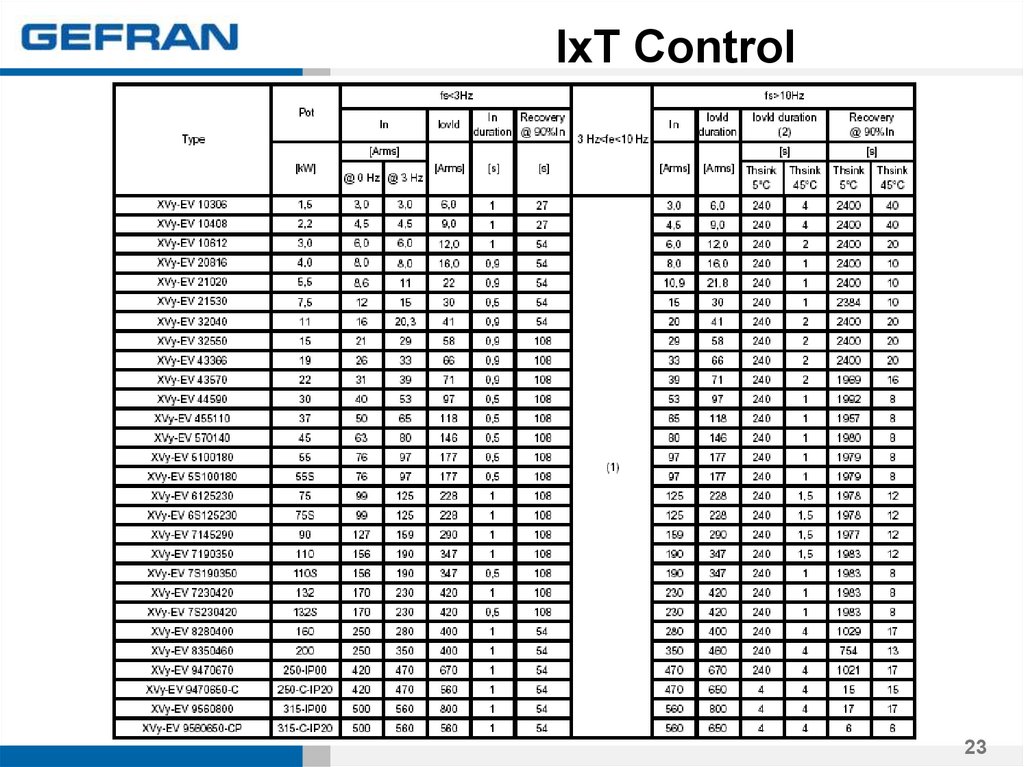
• IxT control
dedicated to high dynamic application where the overload
can reach the 200% of the drive rated current
• I2T control
suitable in applications where it is requested a lower overload
for a longer time (136% In Class1 for 60s every 300s)
Typical applications are the continuous lines.
19
20.
I2T controlExample:
For the same machine where is requested a standard
overload 150% every 60s we to choice between an
asynchronous solution or a brushless solution with the
following data:
Asynchronous
AX 100K.2
Nominal Torque = 21Nm
Nominal Speed = 3000rpm
Nominal Current = 15.4A
Nominal Power = 6.6KW
Brushless
SBM78 30 3
Nominal Torque = 21Nm
Nominal Speed = 3000rpm
Nominal Current = 13.3A
Nominal Power = 6.6KW
20
21.
I2T controlExample:
Using the current XVy drive we have to select the
following size:
Asynchronous
Current request at Start = 15.4 * 150% = 23.1A
Drive size = XVyA-2075-KBX
Brushless
Current request at Start = 13.3 * 150% = 19.9A
Drive size = XVy-32040-KBX
The XVy-32040 have the same power section as the
asynchronous version with the size 11KW, so we have
to use a brushless drive 1 size greater.
21
22.
Overload controlExample:
Test of the overload using the current XVy 21530
(with I*T overload control):
In = 15A
Iovld = 30 for Tovld = 1s
Motor overload Imot = 19.9A
Tovld 19.9 = (Iovld – In)*Tovld / (Imot – In)
Tovld 19.9 = (30 – 15)*1 / (19.9 – 15) = 3.06s
It is not enough for the above mentioned application
22
23.
IxT Control23
24.
I2T controlExample:
Test of the overload using the new XVy_EV 21530:
In = 17.7A
Isl-ov = 24.1 for Tsl-ov = 60s
Motor overload Imot = 19.9A
Tsl-ov19.9 = (Isl-ov2 – In2)*Tsl-ov / (Imot2 – In2)
Tsl-ov19.9 = (24.12 – 17.72)*60 / (19.92 – 17.72) = 194s
It is right for the above mentioned application
24
25.
I2T Control25
26.
New FW functionsPassword
It has been implemented a Password with two entry level
1.
User: to avoid modifications in the file parameter of the drive by
not authorized people
The customer can set his personal value.
2.
Service: reserved to SIEI personnel only
Both the password value has to be set in the same parameter:
Keypad PSWD
The “User” password has effect only by using the keypad. If used, it
allows to read only the MONITOR parameter.
Using the E@syDrive configuration software it is anyway possible to
read all the parameter (apart the Service menu)
26
27. New FW functions
New FW functions• Implementation of the management of encoders with
EnDat 2.2 protocol
• Added HYPERFACE protocol on EXP-ABS-XVy
optional card
Increase of the number of words
• The number of words exchangeable through filedbus
(DeviceNET, CANOpen ProfibusDP) will be increased
from 8 to 12
27
28.
New FW functionsCoast-through function
• The coast-through function will be improved adding the emergencystop function (same as AVy version 1.9 FW).
28
29.
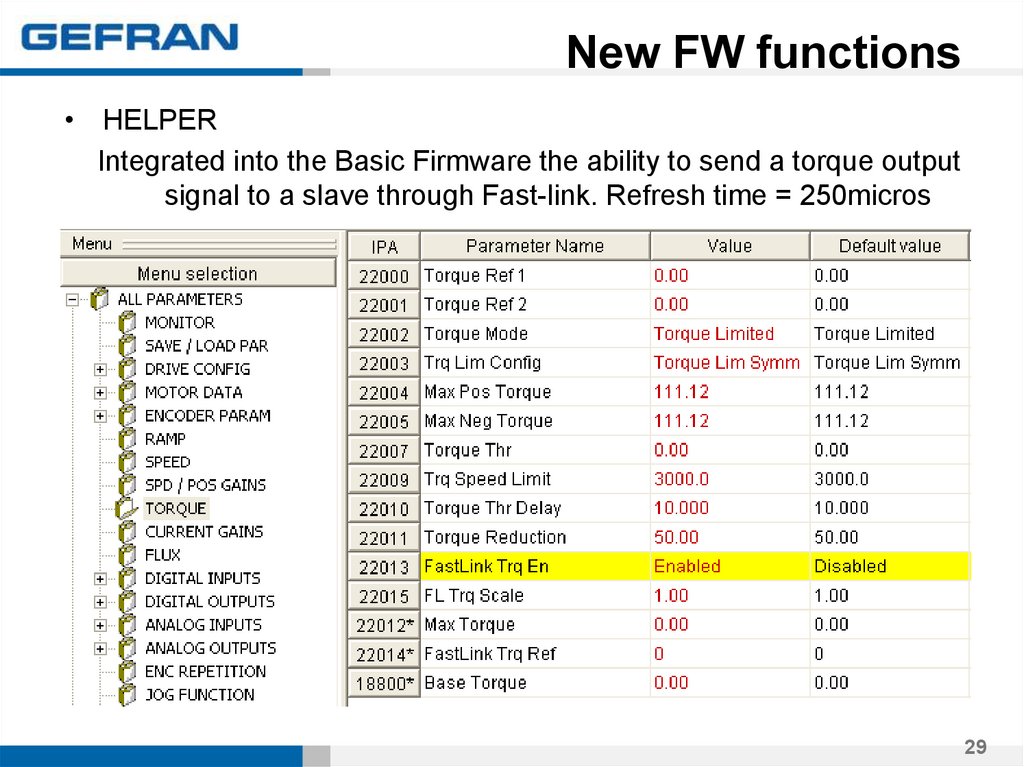
New FW functions• HELPER
Integrated into the Basic Firmware the ability to send a torque output
signal to a slave through Fast-link. Refresh time = 250micros
29
30.
New FW functionsSPEED DRAW
• This function allows to multiply the Speed reference times a Speed
Draw Ratio settable by Analog Input or Bus (same as AVy version
1.9 FW).
• The multiplier will be bypassed in case of Jog or
Configuration Mode Speed
30
31.
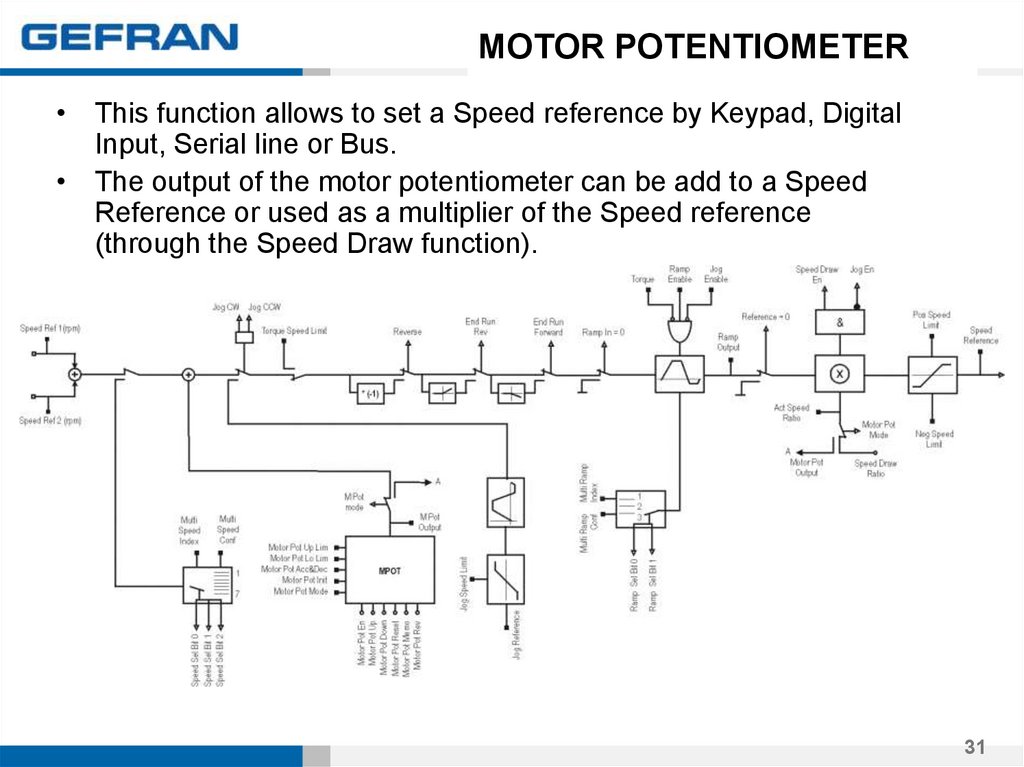
MOTOR POTENTIOMETER• This function allows to set a Speed reference by Keypad, Digital
Input, Serial line or Bus.
• The output of the motor potentiometer can be add to a Speed
Reference or used as a multiplier of the Speed reference
(through the Speed Draw function).
31
32.
MOTOR POTENTIOMETER• When the Motor potentiometer is used as multiplier of the
Speed Reference, it is possible to set the Min. and Max.
multiplier factor.
Doing that the operator can define for example to multiply
the main reference within a defined ratio e.g. +/- 15%.
• If the Motor pot is used in addition to the main reference,
the standard Ramp of the drive will be overwrite by the
Motor pot acceleration and deceleration time.
• If the Motor pot is used to multiply the main reference, the
standard Ramp of the drive is fully independent from the
Motor pot acceleration and deceleration time.
• If a Motor Pot command is assigned to a Digital Input,
this have priority compared to any setting via Keypad,
Serial line or Bus
32
33.
New FW functionsPOSITIONING CONTROL
Positioning control without Homing needed
Position Reference via Analog Input.
The Position Mode parameter must to be set in “Absolute”
10V on the Analog Reference correspond to “Max Pres Abs Val”
The Position reference is showed in the parameter Pos preset 0
There are two way to use this function:
Pos An Mode = Step
Pos An Mode = Continuous
33
34.
ANALOG POSITION REFERENCEPos An Mode = Step
When the motor reaches the Position reference (Pos
Reached = On), any other modification in the reference
will be ignored.
To start for a new set point it is necessary to give one
more “Pos Start Pos” command.
If the Position reference is continuously modified during
the movement of the motor, it is continuously refreshed.
If, during the movement of the motor, the Position
reference became stable, any other modification will be
ignored.
34
35.
ANALOG POSITION REFERENCEPos An Mode = Continuous
The position reference is continuously refreshed.
Any modification in the Position reference will be followed
by the motor without any transition in the “Pos Start Pos”
command.
It is strongly recommended to well set the parameter
Pos An Wind Del
Pos An Stdy Wind
Pos An Filter = 0 (default value = 0.2)
35
36.
New FW functionsPOSITIONING CONTROL
Multi Positioning Control (sequence of events)
It is possible to define a sequence of position defined
in “Pos Preset 0” and “Pos Preset 7”.
When a position is reached it is possible to go on with
the next position if is verified a defined condition.
Possible condition are:
• Delay after Pos Reached
• Event from Digital Input or Bus
• Delay + Event
36
37.
POSITIONING CONTROLMulti Positioning Control
Depending on the application, it is possible to configure the
parameter Position Mode in “Absolute” or in “Incremental” mode.
Making a loop between the “Pos Preset X” it is possible to work
continuously like for a Belt Conveyor
37
38.
E@SYDRIVE tool• The tool recognize directly the Drive Size and Software
Version
• It is possible to work ONLINE or OFFLINE
38
39.
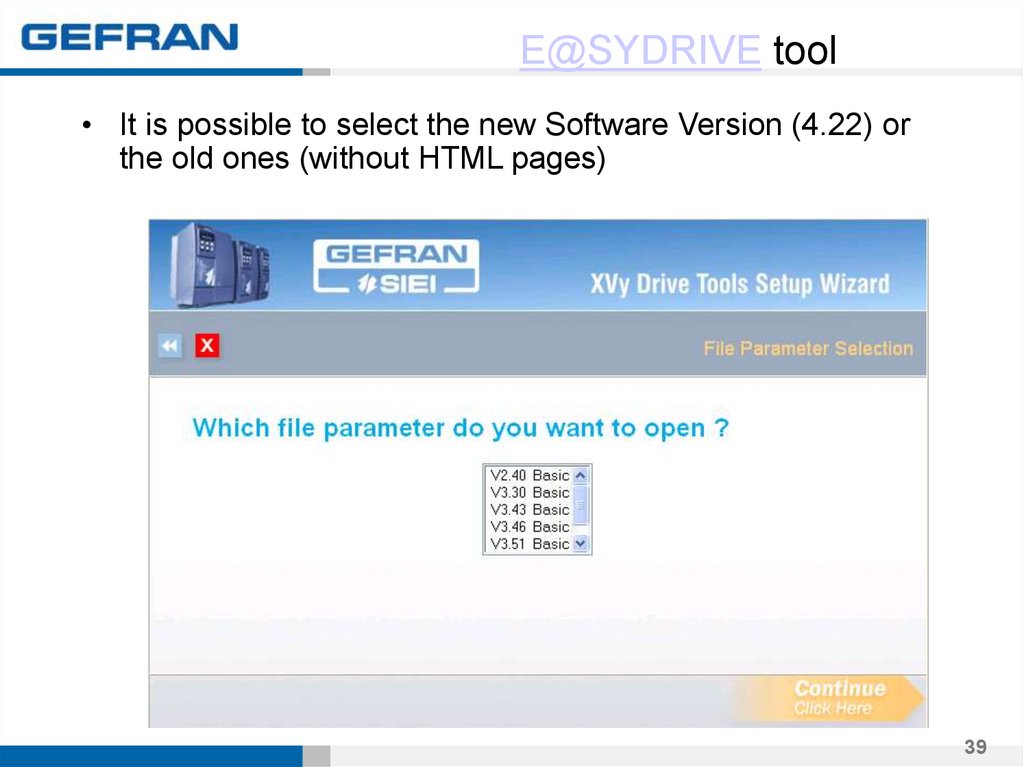
E@SYDRIVE tool• It is possible to select the new Software Version (4.22) or
the old ones (without HTML pages)
39
40.
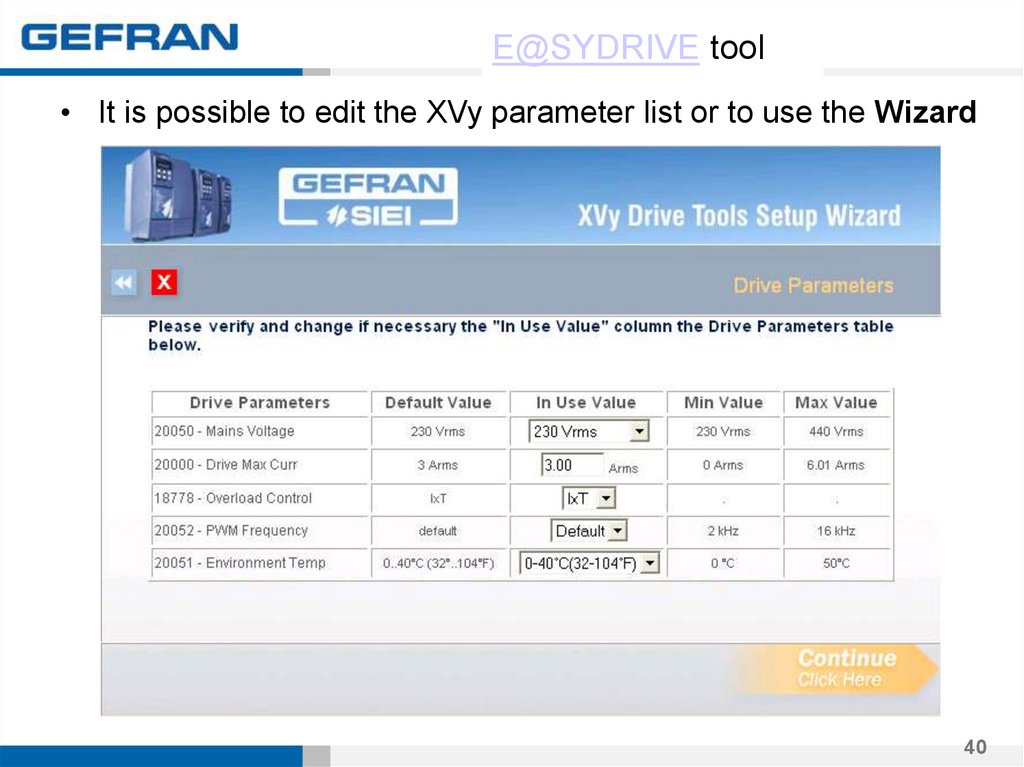
E@SYDRIVE tool• It is possible to edit the XVy parameter list or to use the Wizard
40
41.
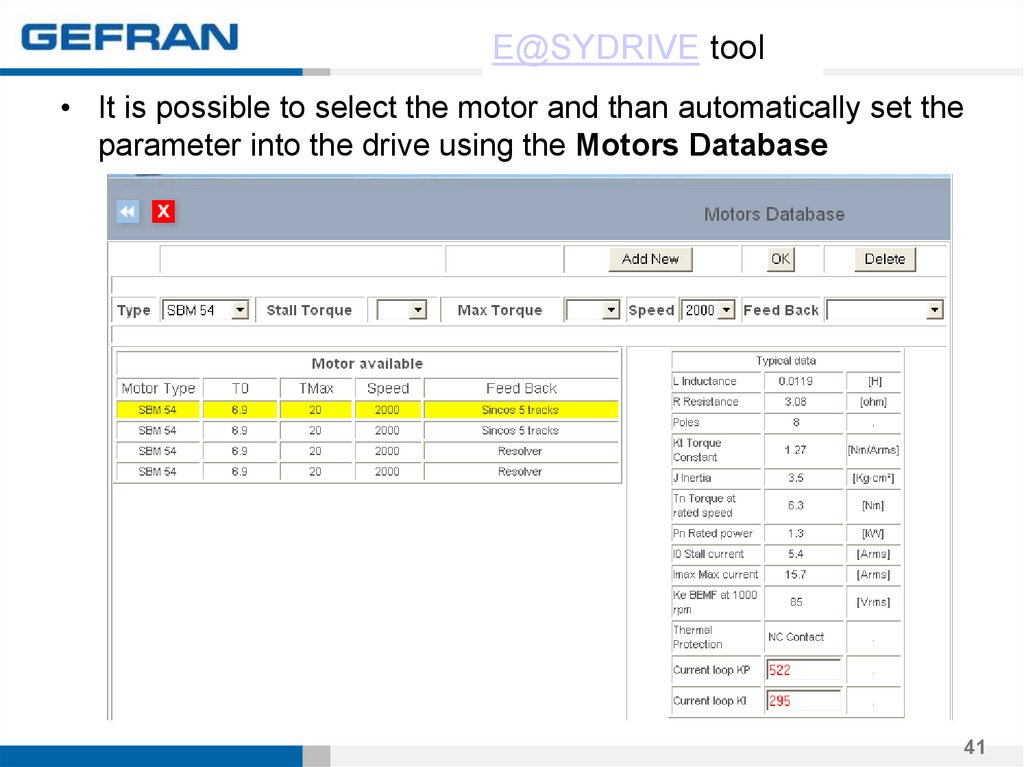
E@SYDRIVE tool• It is possible to select the motor and than automatically set the
parameter into the drive using the Motors Database
41
42.
E@SYDRIVE tool• It is possible to define a new Motors Database
42
43.
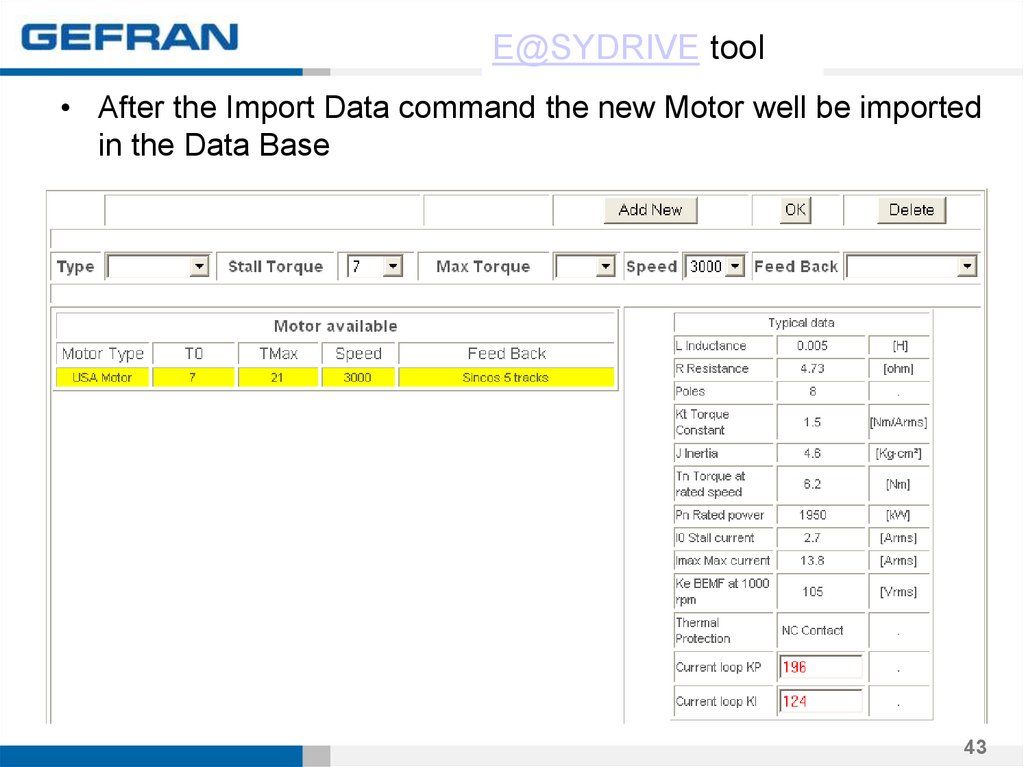
E@SYDRIVE tool• After the Import Data command the new Motor well be imported
in the Data Base
43
44.
E@SYDRIVE tool• New SoftScope2 Version 1.0
it is possible to open the scope tool directly from E@syDrive icons:
Service -> Tools -> Softcope
44
45. New HTML pages for Custom application
• It is on development by the Application Office anormalization of some of the last application realized
in particular: Flying Shear and Feeders control.
• These application will be downloadable in the
regulation card and manageable through the PC
configuration software E@sy Drive by using some
dedicated HTML pages.
• The pages will be specifically related to the application
itself and then from here all the data could be changed
and monitored.
45
46.
XVy-EVPassword for special
applications
FOR SPECIAL SIEI APPLICATIONS IT IS NECESSARY
A DEDICATED PASSWORD
IN THIS CASE THE CUSTOMER WILL RECEIVE A PLC
KEY THAT WORKS WITH JUST THE APPLICATION HE
ASKED FOR.
46