




























 mathematics
mathematics electronics
electronicsSimilar presentations:



")






Динамическое описание систем. Фильтрация Калмана
1.
2.
33.
Схема обработкифильтром
ИСХ. ДАННЫЕ:
2 исходные оценки
(зеленые точечки)
модель движения –
вектор скорости
позволяет указать
центр строба
РЕКУРРЕНТНАЯ
ОБРАБОТКА:
Очередная оценка;
Улучшенная экстраполяция,
Обработка невязки
ЗАДАЧИ: уметь
дать графические
интерпретации
4
4.
Условные обозначения и этапыобработки информации
Модель экстраполяции
по опорным точкам оценок
Обработка измерений
ИЗМЕРЕНИЕ
Начальная
оценка
Подвижка:
“экстраполяция”
Обработка вектора
невязки
5
Содержание
5.
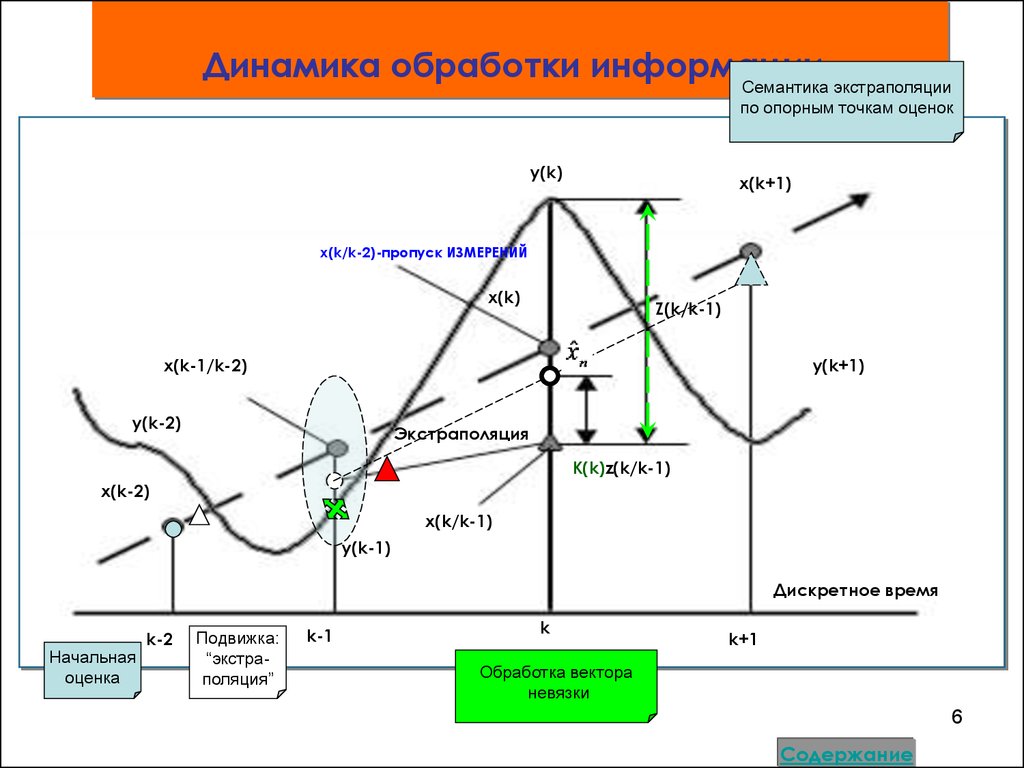
Динамика обработки информацииСемантика экстраполяции
по опорным точкам оценок
y(k)
x(k+1)
x(k/k-2)-пропуск ИЗМЕРЕНИЙ
x(k)
Z(k/k-1)
x(k-1/k-2)
y(k+1)
y(k-2)
Экстраполяция
K(k)z(k/k-1)
x(k-2)
x(k/k-1)
y(k-1)
Дискретное время
Начальная
оценка
k-2
Подвижка:
“экстраполяция”
k-1
k
k+1
Обработка вектора
невязки
6
Содержание
6. Динамика обработки информации
Размеры СТРОБА при пропуске измерений7
7. Размеры СТРОБА при пропуске измерений
108.
119.
1210.
1311.
1412.
1513.
Фильтрация КалманаВозможны два варианта описания
динамических систем – с помощью
дифференциальных или разностных уравнений.
Наш пример предполагает, что наблюдения и
измерения проводятся в условиях шума. Как
правило, принимается модель нормального
закона распределения шума.
Для уяснения характера математической
постановки формирования оценок
рассмотрим случай одномерной
динамической системы. Матрица А
представлена числом а.
Матрица С, выделяющая наблюдаемые
состояния отражена одиночным множителем 1
Уравнения движения и измерения имеют только
по 2 слагаемых
x n ax n 1 n
yn xn n
a 1, xn 1
n , n 1
(1) Одномерные
динамические системы
Содержание
16
14.
Задача фильтрации требует уменьшитьвлияние. n , n
Задачу фильтрации будем решать
методом наименьших квадратов.
Вводится эмпирический риск :
n
n
n
n
( x n ) ( yi xi ) i ( xi axi 1 ) i2 min( x1 , x 2 ... x n )
2
i
i 1
2
2
i
i 1
i 1
i 1
(2)
– классическая формулировка метода
наименьших квадратов . Эмпирическим
риск назван так потому, что в риск входят
наблюдения.
Согласно формуле (2) требуется
минимизировать риск, и следовательно
уменьшить влияние шумов.
17
15.
Принятая модель уравнения (1) дает возможностьзаписать риск.
n
2
( x ax
i 1
i
i 1
)
Необходимо так выбрать xi, чтобы получить минимум
по всей траектории. Набор оценок, соответствующий
оптимальной траектории, будем обозначать
x 1 , x 2 ,... x n
Он получается путем дифференцирования
d
0
dxi
Проделав математические операции получаем
одномерный фильтр Калмана.
18
16.
x n ax n 1 K u ( y n ax n 1 )1
1
1
Ku
2
K a2
2
n 1
(3)
Фильтр
Калмана
K1 1, x o
– фильтр Калмана сглаживает шумы и, если
шумы гауссовские, то этот фильтр является
оптимальным.
M ( x n xn ) 2 min
n
x n
(4)
Формула (4) является критерием минимума
среднеквадратической ошибки.
19
17.
Фильтр Калмана дает оценку процессаистинного процесса для гауссовских шумов,
оптимальную по критерию (4) – по критерию
минимума среднеквадратической ошибки.
Замечание 1 :
Оптимальность означает, что не
существует другого фильтра, который мог бы
дать такие же результаты по
среднеквадратической ошибке. (Остальные
фильтры дают большую ошибку)
Замечание 2 : Фильтр Калмана реализуется на
ЭВМ во временной области, а не в частотной
20
18.
Анализ свойств Фильтра КалманаФильтрация медленных процессов
,
При а=0.999 и
2 1
х(t) есть медленный
процесс, тогда
Ki 0
что следует из формулы (3)
В этом случае ФК осуществляет
x i ax i 1 преимущественно
экстраполяцию(прогноз),т.е.прошлая и
текущая оценки почти одинаковы.
21
19.
. .. недостаткиВ таком фильтре Калмана почти полностью
игнорируются наблюдения.
При оценке ситуации фильтр Калмана не доверяет
наблюдениям, а доверяет лишь прошлой оценке.
Это годится для процессов, течение которых
можно легко предсказать.
2
Фильтрация быстрых процессов
–
большая
величина (>1);
22
20.
Тогда , в этом случаеx i yi
. .. недостатки
(оценка) равна самим наблюдениям. Это
значит, что фильтр Калмана не доверяет
прошлым оценкам.
Вывод : Фильтр Калмана минимизирует и
флуктуационную и динамическую ошибку.
23
21.
Модель нормального функционированиясистемы передачи информации
x(k)
ξ
x(k+1)
С
1
A
(k/k)
y(k)
Ψ(k)
v(k)
24
22.
Модель системы управленияОбъект
управления
Исполнительное
устройство
Датчики
G(k+l,k)
B(k+l,k)
Регулятор
U(k)=L(k)
Оптимальный
фильтр
(k/k)
Содержание 26
23.
Одним из важных источников нарушений в ДС являетсяканал измерения. Нарушения в канале измерения
могут происходить но целому ряду причин, основными
из которых являются:
• случайные пропадания информационных сигналов;
появление ложных (аномальных) измерений y(k);
• резкое возрастание шумов измерений v(k) или
случайное изменение их характеристик.
Использование при этих условиях алгоритмов
оценивания, не учитывающих возможности появления
нарушений
канале
измерения,
приводит
к
существенному возрастанию ошибок фильтрации, а в
задачах сопровождения целей — к срыву слежения.
28
24. Модель нормального функционирования системы передачи информации
Основные особенности фильтра Калмана.• фильтр представляет собой рекуррентный,
удобный для реализации на ЭВМ, алгоритм
вычисления оценки состояния ДС при полностью
известной ее модели;
• оценка, получаемая с помощью этого фильтра,
является линейной относительно наблюдений;
• корреляционная матрица ошибок фильтрации
P(k/k) вследствие линейности фильтра не
зависит от наблюдений y(k)и, следовательно,
может быть вычислена заранее;
Содержание
29
25.
• алгоритмы фильтрации легкораспространяются на многомерный
случай(для многоканальных систем);
• так как параметры фильтра Калмана
изменяются во времени, то такой фильтр
минимизирует среднеквадратическое
значение ошибки оценивания не только в
установившемся режиме, но и в течение
переходного процесса.
30
26. Модель системы управления
Вычислительная схема Фильтра КалманаУстановка начального
P(k-1/k-1)
значения P0
Вычисление P(k/k-1)
P (k/k-1)
Вычисление P(k/k)
P(k/k)
x(k)
Модель
сообщения
y(k)
Модель
канала
u(k)
Q(k)
Априорные данные
R(k)
Установка начального
значения x(0)
K(k)
Вход
x (k-1/k-1)
x(k/k-1)
Содержание 31
27.
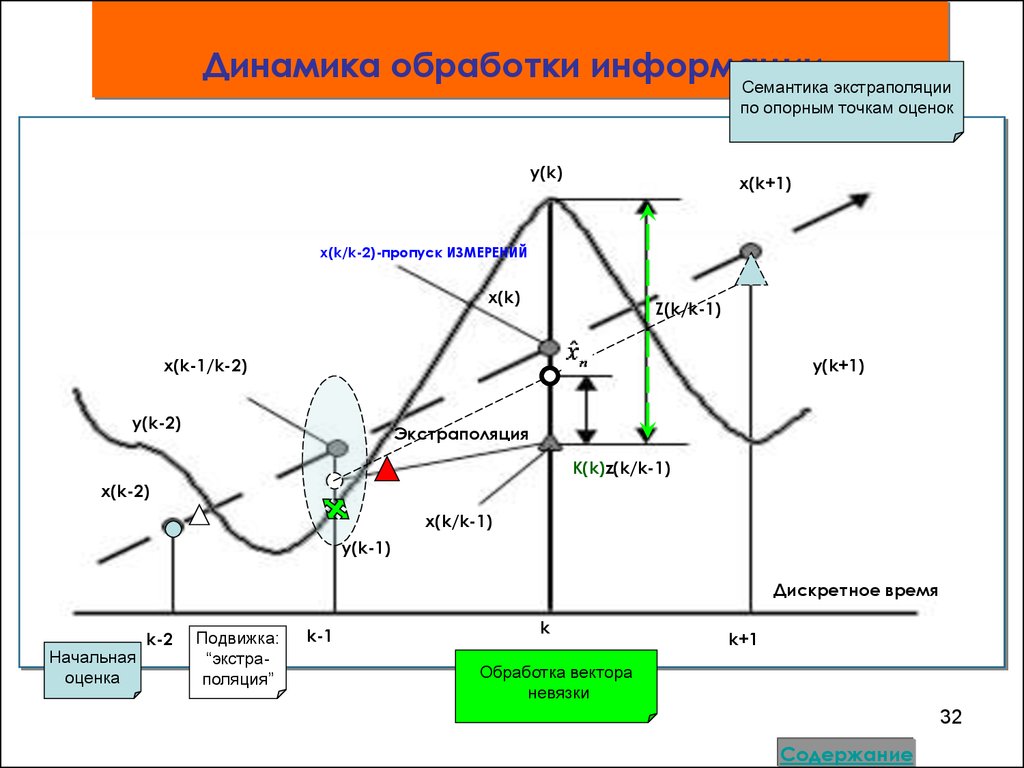
Динамика обработки информацииСемантика экстраполяции
по опорным точкам оценок
y(k)
x(k+1)
x(k/k-2)-пропуск ИЗМЕРЕНИЙ
x(k)
Z(k/k-1)
x(k-1/k-2)
y(k+1)
y(k-2)
Экстраполяция
K(k)z(k/k-1)
x(k-2)
x(k/k-1)
y(k-1)
Дискретное время
Начальная
оценка
k-2
Подвижка:
“экстраполяция”
k-1
k
k+1
Обработка вектора
невязки
32
Содержание
28.
Динамика обработки информацииСемантика экстраполяции
по опорным точкам оценок
y(k)
x(k+1)
x(k/k)
x(k)
Z(k/k-1)
x(k-1/k-2)
y(k+1)
y(k-2)
Экстраполяция
K(k)z(k/k-1)
x(k-2)
x(k/k-1)
y(k-1)
Дискретное время
Начальная
оценка
k-2
Подвижка:
“экстраполяция”
k-1
k
k+1
Обработка вектора
невязки
33
Содержание
29. Основные особенности фильтра Калмана.
СТРОБЫ34
30.
Стробы35
31. Вычислительная схема Фильтра Калмана
Динамика обработки информацииСемантика экстраполяции
по опорным точкам оценок
y(k)
x(k+1)
x(k/k)
x(k)
Z(k/k-1)
x(k-1/k-2)
y(k+1)
y(k-2)
Экстраполяция
K(k)z(k/k-1)
x(k-2)
x(k/k-1)
y(k-1)
Дискретное время
Начальная
оценка
k-2
Подвижка:
“экстраполяция”
k-1
k
k+1
Обработка вектора
невязки
36
Содержание
32. Динамика обработки информации
y(k)x(k+1)
x(k/k)
x(k)
Z(k/k-1)
x(k-1/k-2)
y(k+1)
y(k-2)
Экстраполяция
K(k)z(k/k-1)
x(k-2)
x(k/k-1)
y(k-1)
Дискретное время
k-2 Подвижка:
Начальная
“экстраоценка
поляция”
k-1
k
k+1
37
Содержание