

















 physics
physicsSimilar presentations:




")





Работа и энергия
1. РАБОТА И ЭНЕРГИЯ
2.
• Энергия – универсальная мера различныхформ
движения
и
взаимодействия
материи.
• С различными формами движения материи
свя-зывают различные формы энергии
(механичес-кую, тепловую, ядерную и т.д.)
• Во всех случаях энергия отданная (в той или
иной форме одним телом другому телу,
равна энергии полученной последним
телом.
• Изменение механического движения тела
3. Работа силы
Если тело движется прямолинейнои на него дей
ствует постоянная сила F , которая составляет
угол с направлением перемещения, то работа
этой силы будет равна произведению проекции
силы Fs на направление перемещения Fs F cos
умноженной на перемещение точки приложения
силы
A Fs S FS cos
Единица измерения работы- джоуль ( Дж)
1 Дж=1Н м
4.
Элементарной работой силы F на перемещении Sбудет называться скалярная величина
A Fdr F cos dS Fs dS
F
где:
v
• -угол между векторами F и dr
dr Fs
• dS dr -элементарный путь
1
• Fs -проекция вектора F на вектор dr
Работа силы на участке траектории от точки 1 до 2
равна сумме элементарных работ на отдельных
бесконечно малых участках пути
2
2
1
1
A FdS cos Fs dS
2
5.
Для вычисления этого интеграла надо знать зависимость силы от пути вдоль траектории 1-2.На графике работа А определяется площадью заштрихованной фигуры.
Если тело двигается прямолинейноFs
1
dA 2
а параметры F и α постоянны, то
2
2
1
1
A FdS cos F cos dS FS cos
А
При работа силы положительна,
2
dS
и Fs совпадает по направлению с вектором v ,
при работа силы отрицательна, при
2
2
(направление перпендикулярно перемещению)
работа равна нулю.
S
6. Мощность
Что бы охарактеризовать скорость совершения работы вводят понятие мощностьdA Fdr
N
Fv
dt
dt
единица измерения мощности- Ватт (Вт)
1 Вт=1 Дж/с
Мощность равна скалярному произведению вектора силы на вектор скорости с которой движется точка приложения силы.
7. Кинетическая и потенциальная энергии
8.
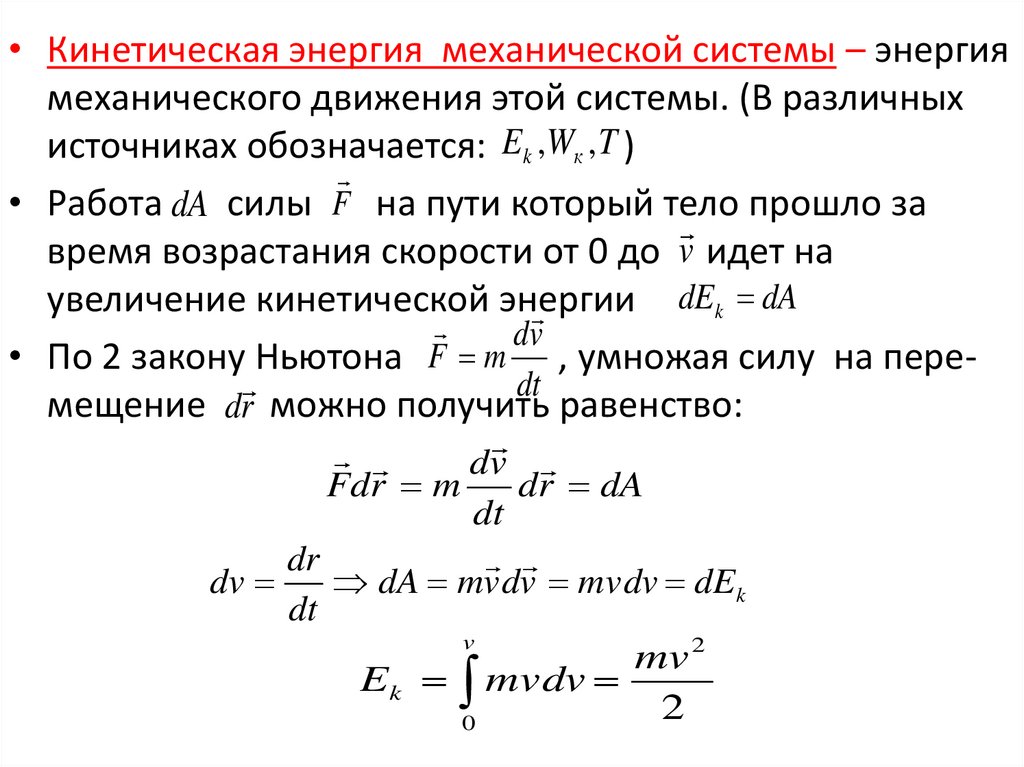
• Кинетическая энергия механической системы – энергиямеханического движения этой системы. (В различных
источниках обозначается: Ek ,Wк , T )
• Работа dA силы F на пути который тело прошло за
время возрастания скорости от 0 до v идет на
dEk dA
увеличение кинетической энергии
dv
• По 2 закону Ньютона F m , умножая силу на пере
dt
мещение dr можно получить равенство:
dv
Fd r m
dr dA
dt
dr
dv
dA mv dv mvdv dE k
dt
v
mv 2
E k mvdv
2
0
9.
• Тело массой m двигающееся со скоростью vобладает кинетической энергией
mv 2
Ek
2
• Кинетическая энергия зависит только от скорости
и массы тела то есть кинетическая энергия системы есть функция состояния её движения.
• Движение рассматривается в инерциальной системе отсчета. В разных инерциальных системах
отсчета, двигающихся относительно друг друга
скорость тела, а значит и кинетическая энергия
будут неодинаковы. Значит кинетическая энергия
зависит от выбора системы отсчета.
10.
• Стационарные силовые поля называются потенциальными а килы действующие в них консервативными , если работа этих сил на любом замкнутом контуре равна нулю (0). Если же работа совершаемая силой зависит от траектории перемещения тела то такая сила называется диссипативной.• Работа сил потенциального поля при переносе
тела из одного положения в другое не зависит от
вида пути по которому идет перемещение, а определяется только положением начальной и конечной точек.
11.
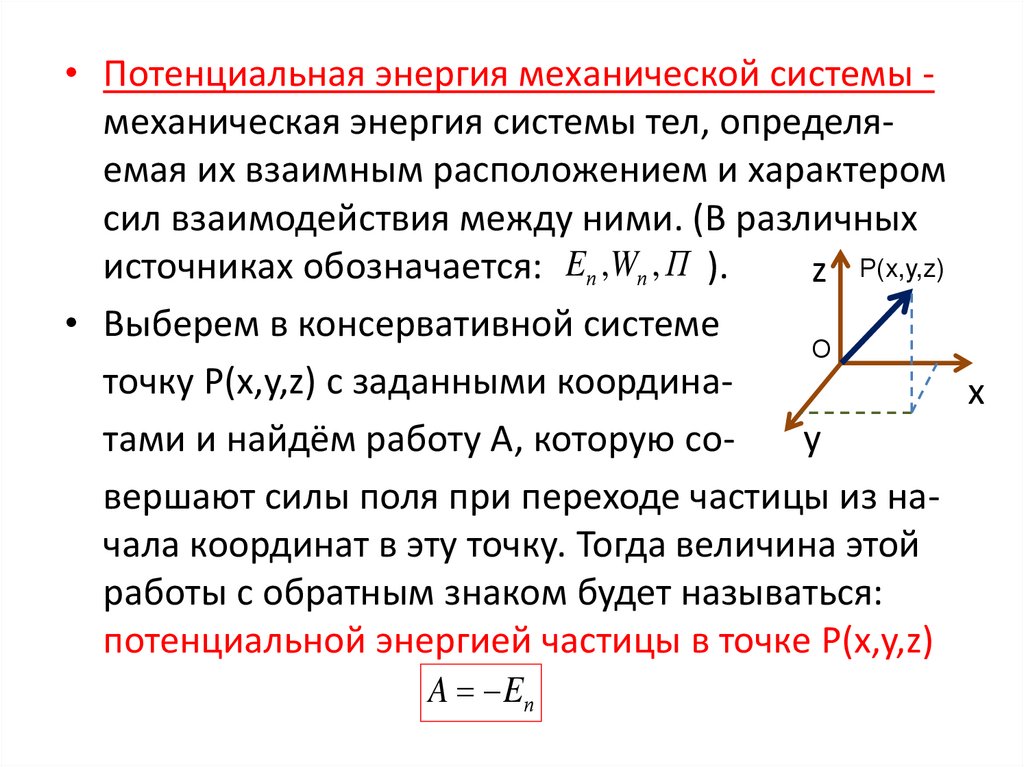
• Потенциальная энергия механической системы механическая энергия системы тел, определяемая их взаимным расположением и характеромсил взаимодействия между ними. (В различных
источниках обозначается: Eп ,Wп , П ).
z Р(x,y,z)
• Выберем в консервативной системе
О
точку P(x,y,z) с заданными координаx
y
тами и найдём работу А, которую совершают силы поля при переходе частицы из начала координат в эту точку. Тогда величина этой
работы с обратным знаком будет называться:
потенциальной энергией частицы в точке P(x,y,z)
A Eп
12.
• Работа консервативных сил при элементарном изменении конфигурации системы, равна обратномузначению приращения потенциальной энергии.
dA Fdr dE п E п Fdr C
где: С- постоянная интегрирования.
• Потенциальная энергия может иметь отрицательное значение (кинетическая энергия всегда имеет
положительное значение).
• Конкретный вид функции Eп зависит от характера
силового поля.
• Потенциальная энергия является функцией состояния системы, зависит только от конфигурации
системы и её положения по отношению к внешним
телам.
13. Виды потенциальной энергии
• Потенциальная энергия тела массой m поднятогона высоту h над поверхностью Земли
Eп mgh
Эта формула выводится непосредственно из того,
что потенциальная энергия равна работе силы тяжести при падении тела с высоты h на поверхность
Земли. Соответственно если h=0 то E п 0 .
Если принять за 0 значение потенциальной энергии тела на поверхности Земли , то потенциальная
энергия тела лежащего на дне шахты глубиной h
будет равна Eп mgh
14.
• Потенциальная энергия упругодеформированноготела (пружины):
kx2
Eп
2
Сила упругости пропорциональна деформации
Fx упр kx
где: Fx упр - проекция силы упругости на ось х (знак –
показывает что сила направлена в
сторону противоположную деформации.
k - коэффициент упругости (жесткость)
Fx Fхупр kx -деформирующая сила
x
kx2
dA Fx dx kxdx A kxdx
Eп
2
0
15. Полная механическая энергия системы
Полная механическая энергия системы Еэнергия механического движения ивзаимодействия, равна сумме кинетической и потенциальных энергий.
Е Ек Еп
16. Закон сохранения энергии
Закон сохранения энергии - результат обобщения многих экспериментальных данных.Идея закона принадлежит М. В. Ломоносову (1711-1765), изложившему закон сохранения материи и движения, количественные характеристики выведены Ю. Майером
(1814-1878) и Г. Гельмгольцем (1821-1894).
17.
Пусть имеется система состоящая из n материальных точек где соответственно:• m1 , m2 ,..., mn -массы точек.
• v1 , v2 ,..., vn -скорости точек.
• F1 , F2 ,..., Fn -равнодействующие внутренних консервативных сил действующих на каждую точку.
• F1 , F2 ,..., Fn - равнодействующие внешних консервативных сил действующих на каждую точку.
• f1 , f 2 ,..., f n - равнодействующие внешних неконсервативных сил действующих на каждую точку.
Используя 2 закон Ньютона можно составить систему уравнений:
18.
dv1m1 dt F1 F1 ... f 1
dv 2
m 2
F2 F2 ... f 2
dt
dv n
Fn Fn ... f n
m n
dt
Так как двигаясь под действием сил, точки за интервал времени dt совершат перемещения
равные: dr1 , dr2 ,...drn , то ,учитывая что dri vi dt
можно преобразовать систему:
m (v dv ) ( F F )dr f dr
1
1
1 1 1
1 1 1
m (v dv ) ( F F )dr f dr
2
2
2
2
2
2 2 2
m
(
v
d
v
)
(
F
F
n
n ) drn f n drn
n n n
19.
Сложим уравнения системы и получим:n
n
mi (vi dvi ) ( Fi Fi )dri f i dri
n
i 1
i 1
i 1
Первый член левой части равенства будет равен:
n
mi v i 2
mi (vi dvi ) d
2
i 1
i 1
n
dE k
где dEk- приращение кинетической энергии системы
n
Второй член уравнения ( Fi Fi )dri равен элеi 1
ментарной работе внутренних и внешних консервативных сил (со знаком -) т.е. равен элементарному
приращению потенциальной энергии dE п
20.
Правая часть равенства задаёт работу внешнихнеконсервативных сил действующих на систему.
n
i 1
f i dri d (E п E k ) dA
При переходе системы из состояния 1 в состояние 2
2
d (E
п
E k ) A12
1
Изменение полной механической энергии системы при переходе системы из одного состояния в
другое равно работе совершенной при этом
внешними неконсервативными силами.
21. Закон сохранения механической энергии
В системе тел между которыми действуюттолько консервативные силы полная
механическая энергия сохраняется то есть
не изменяется со временем.
d ( Eп Ek ) 0 Eп Ek E const
22.
• Механические системы, в которых действуют толькоконсервативные силы (внешние и внутренние),
называются консервативными системами.
• Системы, в которых механическая энергия постепенно уменьшается за счёт преобразования в другие (немеханические) формы энергии, называются
диссипативными. Процесс носит название
диссипации или рассеяния энергии.
• Все системы - диссипативные. В системе где действуют неконсервативные силы (силы трения), механическая энергия не сохраняется. Однако, при
исчезновении механической энергии всегда возникает эквивалентное количество энергии другого
типа (внутренней, химической и т.д.)
23.
Энергия никогда не исчезает и не появляетсявновь, она превращается из одного вида в
другой.
Данное выражение- физическая сущность
фундаментального закона природы:
ЗАКОНА СОХРАНЕНИЯ И ПРЕВРАЩЕНИЯ ЭНЕРГИИ
24. Удар абсолютно упругих и неупругих тел
25.
• Примером применения законов сохранения импульса и энергии при решении реальной физической задачи является удар упругих и неупругих тел.• Удар (соударение)- столкновение двух или более
тел, при котором взаимодействие происходит
очень короткое время.
• Силы взаимодействия между сталкивающимися
телами настолько велики, что внешними силами,
действующими на систему, можно пренебречь.
Это позволяет рассматривать соударяющиеся тела
как замкнутую систему.
26.
Сущность удара заключается в том, что кинетическая энергия относительного движения соударяющихся тел на короткое время преобразуется вэнергию упругой деформации. Во время удара
происходит перераспределение энергии между
соударяющимися телами.
Относительная скорость тел после удара не достигает своего прежнего значения. Это объясняется тем,
что нет идеально упругих тел и гладких поверхностей. Отношение нормальных составляющих
относительной скорости тел до и после удара
называется коэффициентом восстановления ε
27. Коэффициент восстановления
vnvn
если:
• 0 сталкивающиеся тела- абсолютно неупругие
• 1 сталкивающиеся тела- абсолютно упругие
В реальной жизни 0 1 , но многие тела можно
приближенно считать упругими и неупругими.
Коэффициенты восстановления у:
• Слоновой кости ε≈0,89
• Стального шара ε≈0,56
• Свинца ε≈0
28. Абсолютно упругие удары
Абсолютно упругие удары – столкновение двухтел, в результате которого в обоих взаимодействующих телах не остаётся никаких деформаций
и вся кинетическая энергия, которой обладали
тела до удара, после удара снова превращается в
кинетическую энергию.
m1
m2 v2
v1
Тела массами m1и m2имеют
скорости до удара v1и v2
m1
m2
скорости после удара v1 и v2
v1
v2
29.
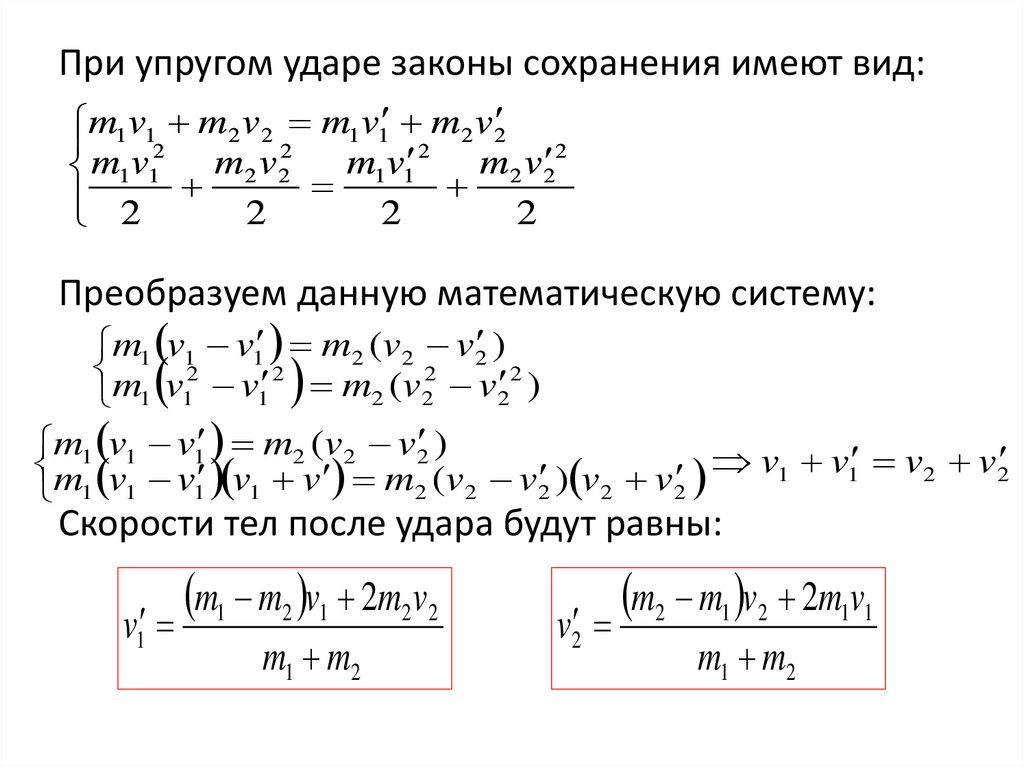
При упругом ударе законы сохранения имеют вид:m1v1 m2 v 2 m1v1 m2 v 2
2
2
2
2
m
v
m
v
m
v
m
v
1 1 2 2 1 1 2 2
2
2
2
2
Преобразуем данную математическую систему:
m1 v1 v1 m2 (v2 v2 )
m v 2 v 2 m (v 2 v 2 )
1
2
2
2
1 1
m1 v1 v1 m2 (v2 v2 )
m v v v v m (v v ) v v v1 v1 v2 v2
1
1
2
2
2
2
2
1 1
Скорости тел после удара будут равны:
m1 m2 v1 2m2 v2
v
1
m1 m2
m2 m1 v2 2m1v1
v
2
m1 m2
30.
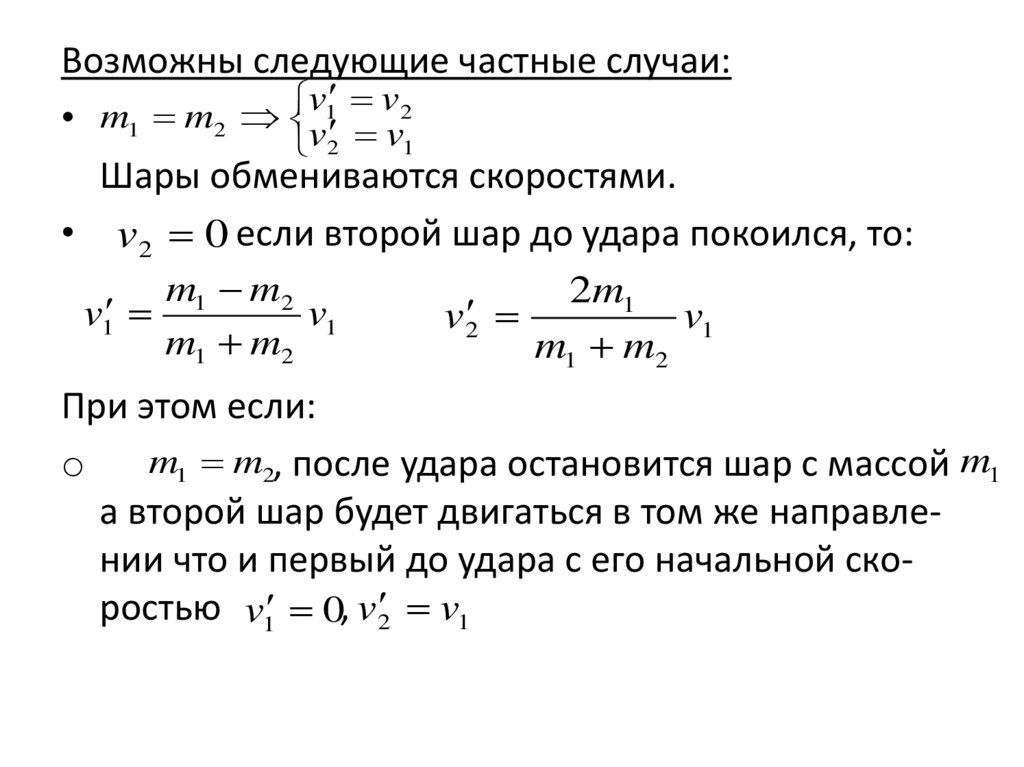
Возможны следующие частные случаи:v1 v2
m
m
• 1
v v
2
1
2
Шары обмениваются скоростями.
• v2 0 если второй шар до удара покоился, то:
m1 m2
2m1
v1
v1
v 2
v1
m1 m2
m1 m2
При этом если:
m1 m2, после удара остановится шар с массой m1
o
а второй шар будет двигаться в том же направлении что и первый до удара с его начальной скоростью v1 0, v2 v1
31.
om1 m2 первый шар продолжает двигаться в том
же направлении что и до удара, но с меньшей
скоростью (v1 v1 ,) скорость второго шара больше
чем скорость первого после удара (v1 v2 )
o m1 m2 направление движения первого шара изменится (шар откатывается), второй шар двигается в ту же сторону в которую двигался первый шар
до удара, но с меньшей скоростью
(v2 v1 )
o
m1 m2 (например столкновение со стеной)
v1 v1
2m1v1
v2
0
m2
32. Абсолютно неупругий удар
Абсолютно неупругий удар – столкновение двух тел,в результате которого тела объединяются как
единое целое.
m1
m2 v 2
v1
Тела массами m1 и m2 имеют
скорости до удара v1 и v2
После удара суммарная масса m1 m2
Скорость объединившихся тел
v
m
m
после удара v
1
2
33.
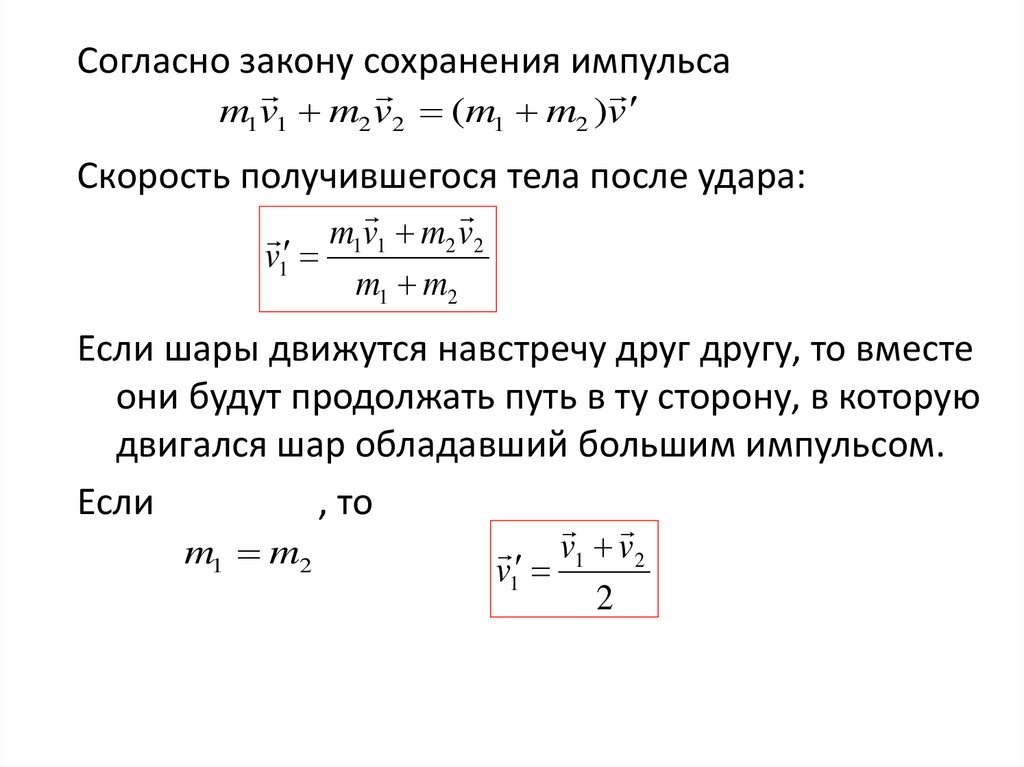
Согласно закону сохранения импульсаm1v1 m2 v2 (m1 m2 )v
Скорость получившегося тела после удара:
m1v1 m2 v2
v1
m1 m2
Если шары движутся навстречу друг другу, то вместе
они будут продолжать путь в ту сторону, в которую
двигался шар обладавший большим импульсом.
Если
, то
m1 m2
v1 v2
v1
2
34.
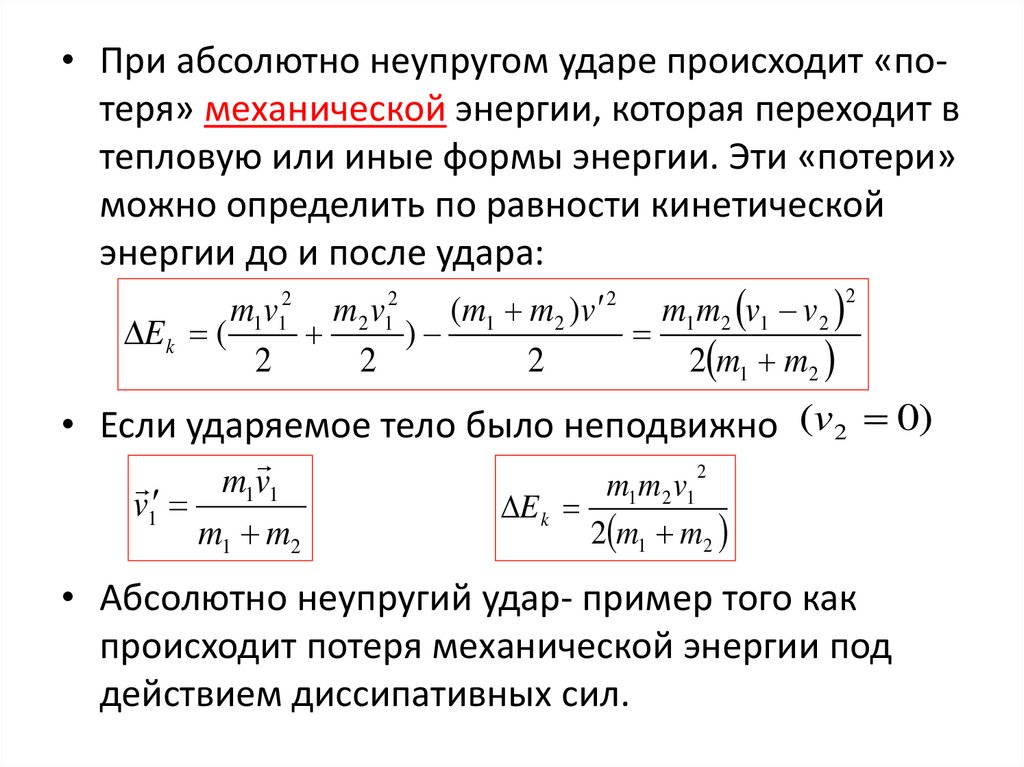
• При абсолютно неупругом ударе происходит «потеря» механической энергии, которая переходит втепловую или иные формы энергии. Эти «потери»
можно определить по равности кинетической
энергии до и после удара:
m1v12 m2 v12 (m1 m2 )v 2 m1 m2 v1 v 2
E k (
)
2
2
2
2 m1 m2
2
• Если ударяемое тело было неподвижно (v2 0)
m1v1
v1
m1 m2
2
mm v
E k 1 2 1
2 m1 m2
• Абсолютно неупругий удар- пример того как
происходит потеря механической энергии под
действием диссипативных сил.