

 electronics
electronicsSimilar presentations:










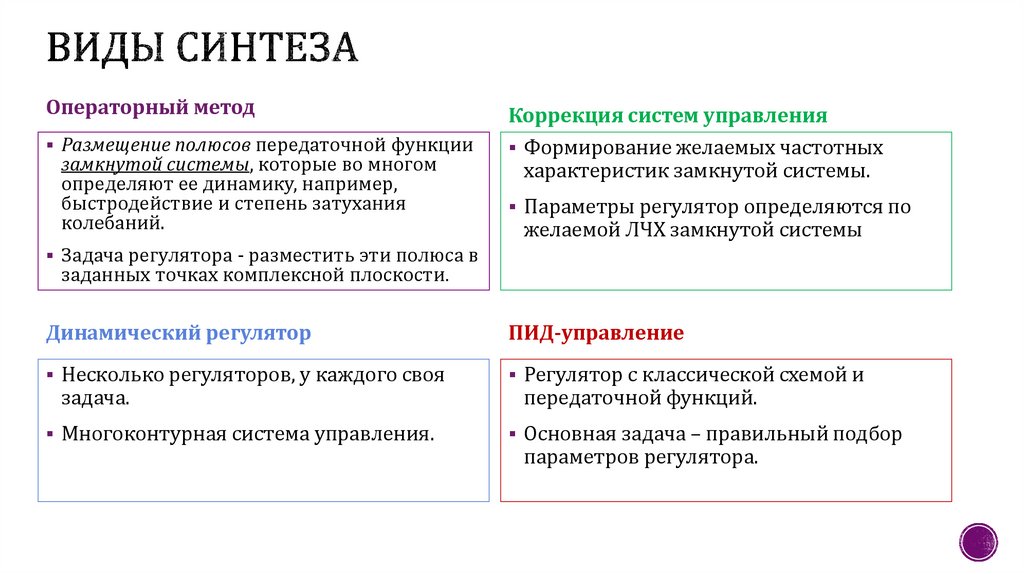
Операторный метод. Коррекция систем управления. Динамический регулятор. ПИД-управление
1.
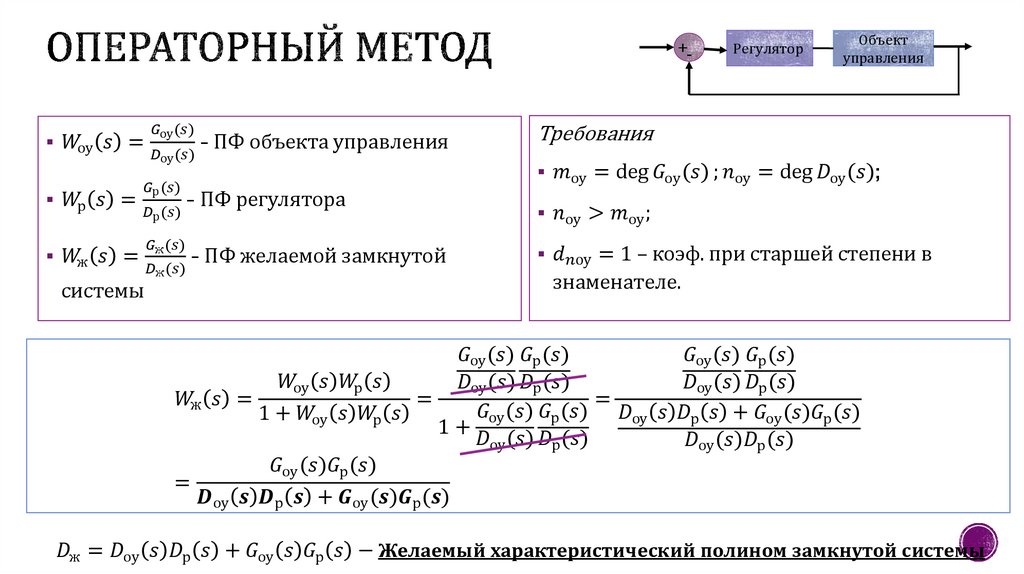
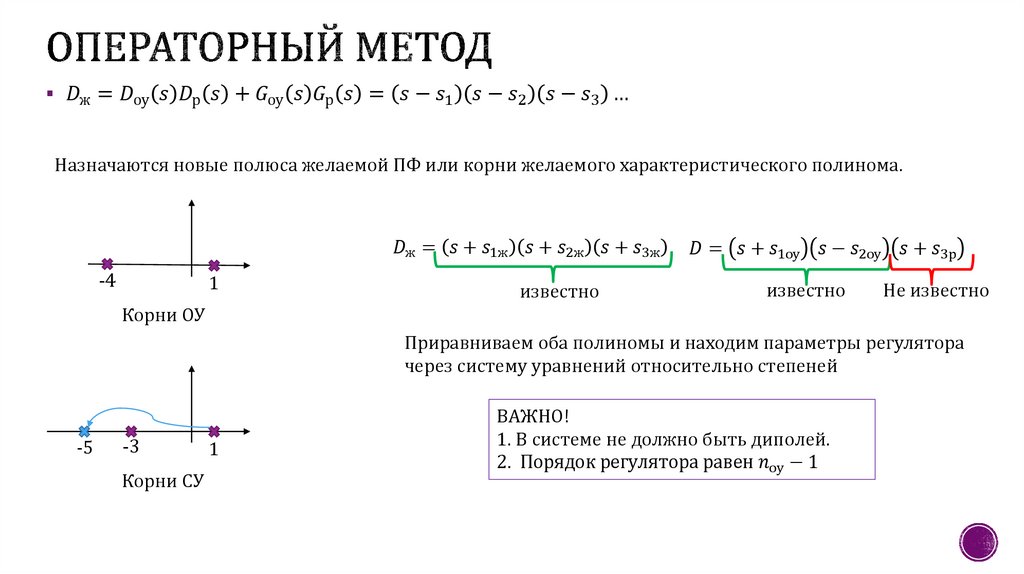
Операторный методРазмещение полюсов передаточной функции
замкнутой системы, которые во многом
определяют ее динамику, например,
быстродействие и степень затухания
колебаний.
Коррекция систем управления
Формирование желаемых частотных
характеристик замкнутой системы.
Параметры регулятор определяются по
желаемой ЛЧХ замкнутой системы
Задача регулятора - разместить эти полюса в
заданных точках комплексной плоскости.
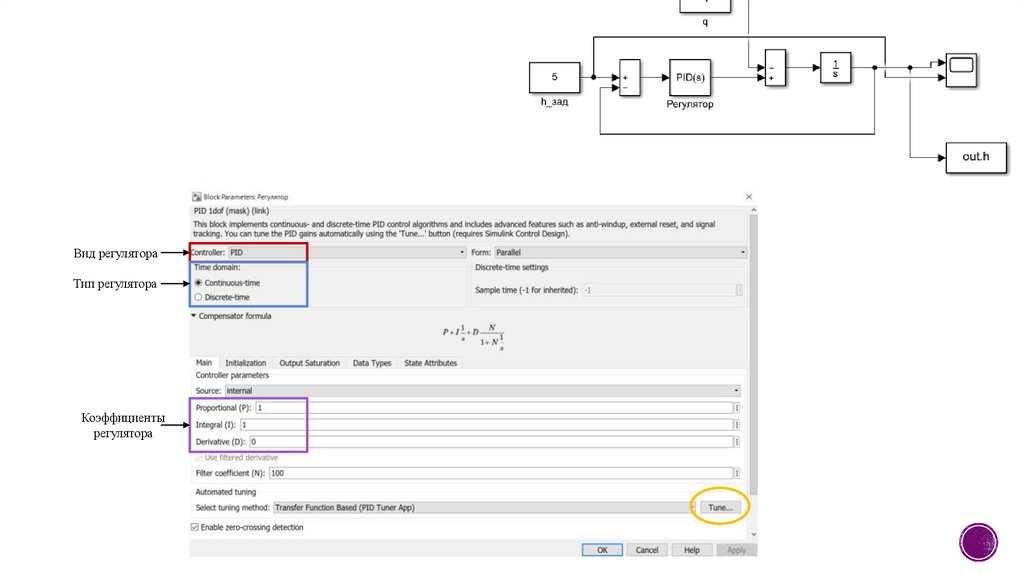
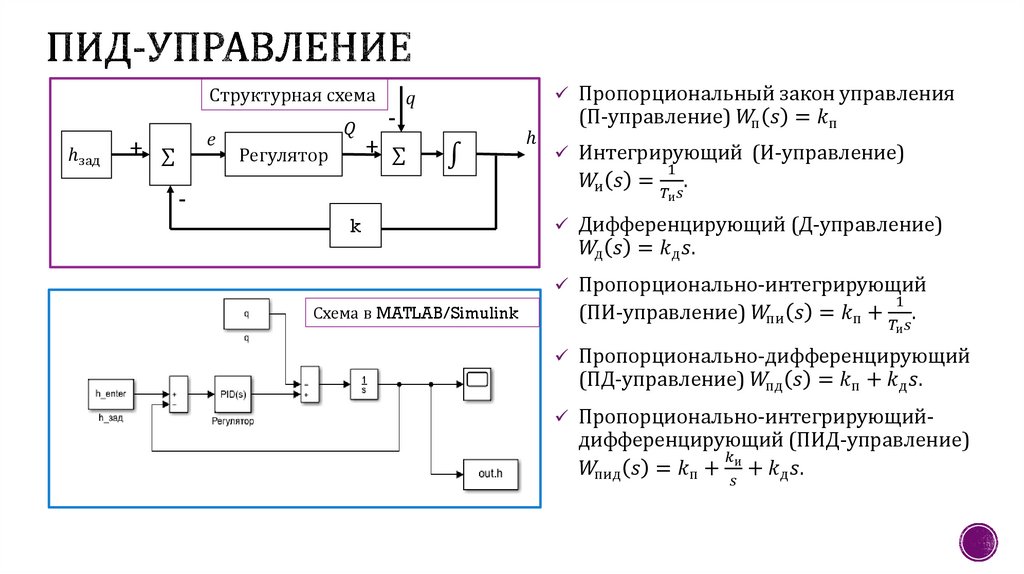
Динамический регулятор
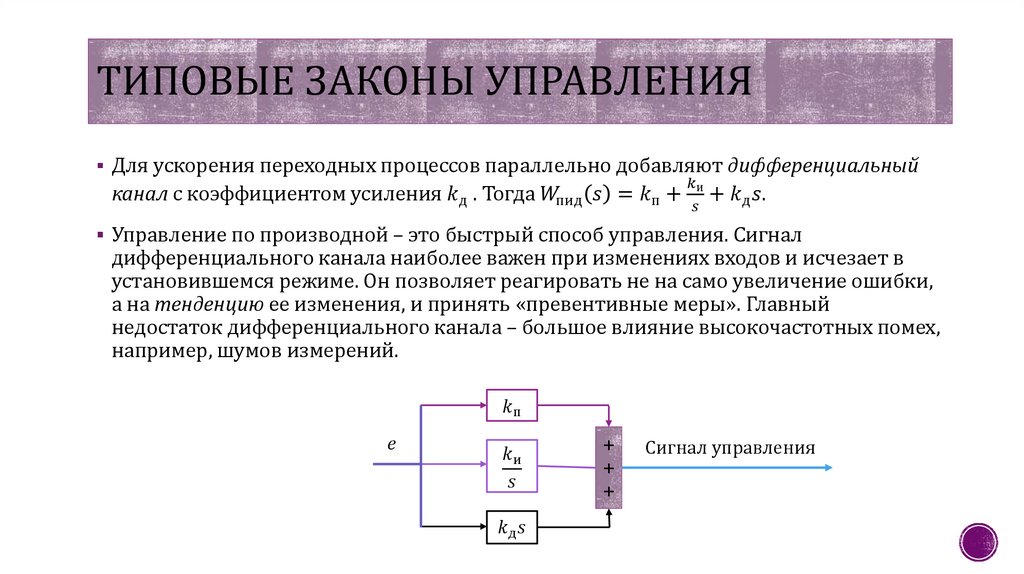
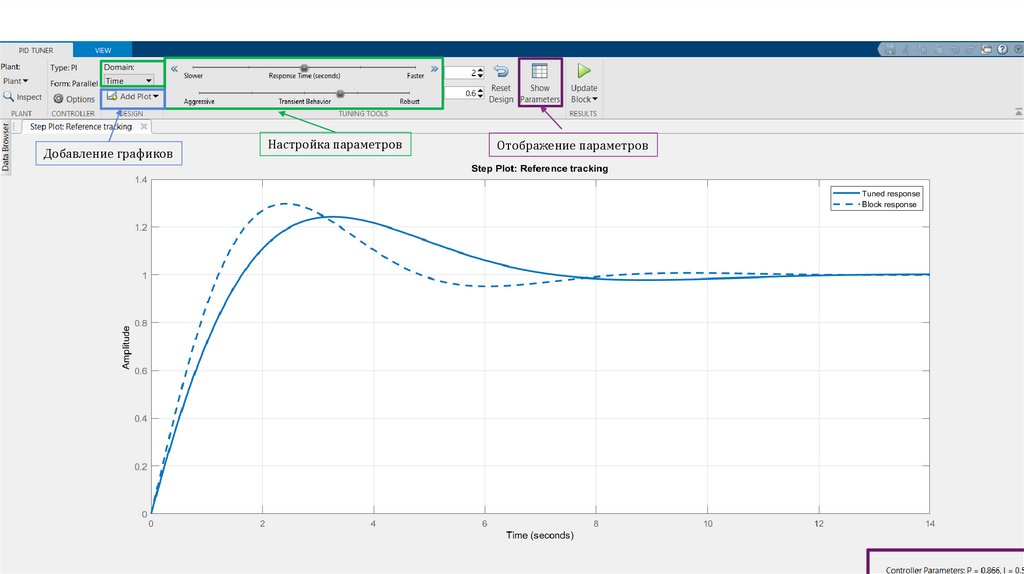
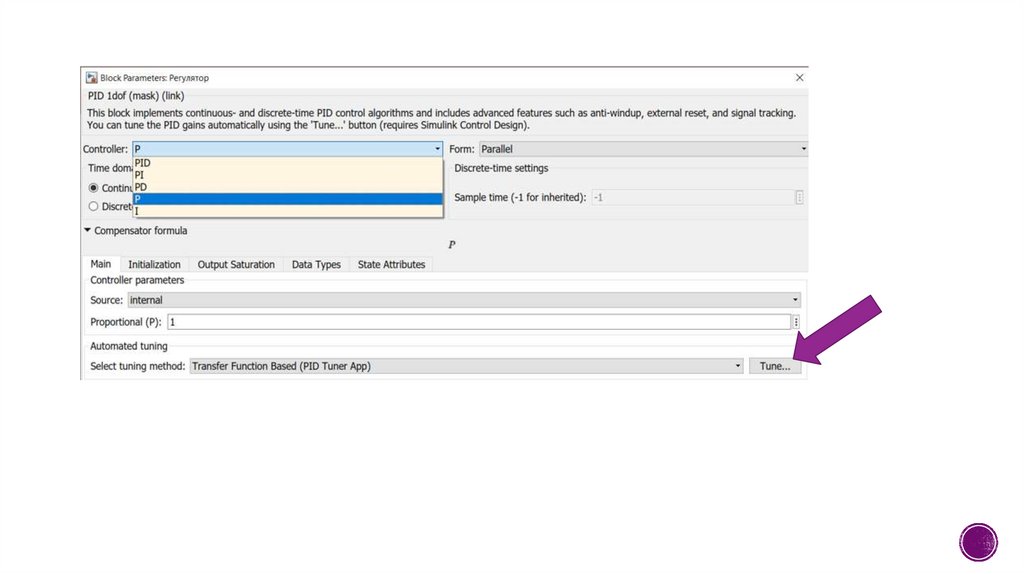
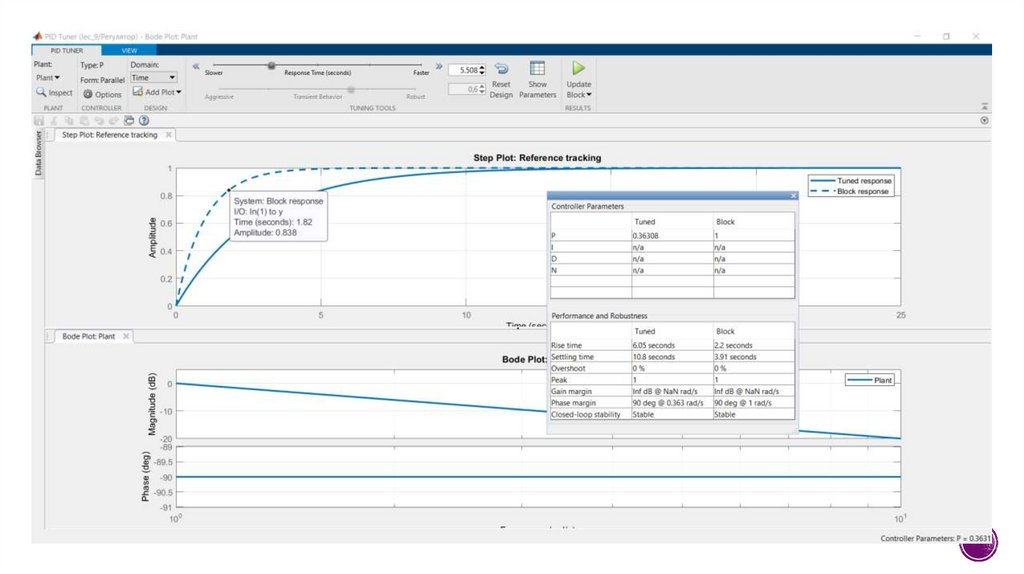
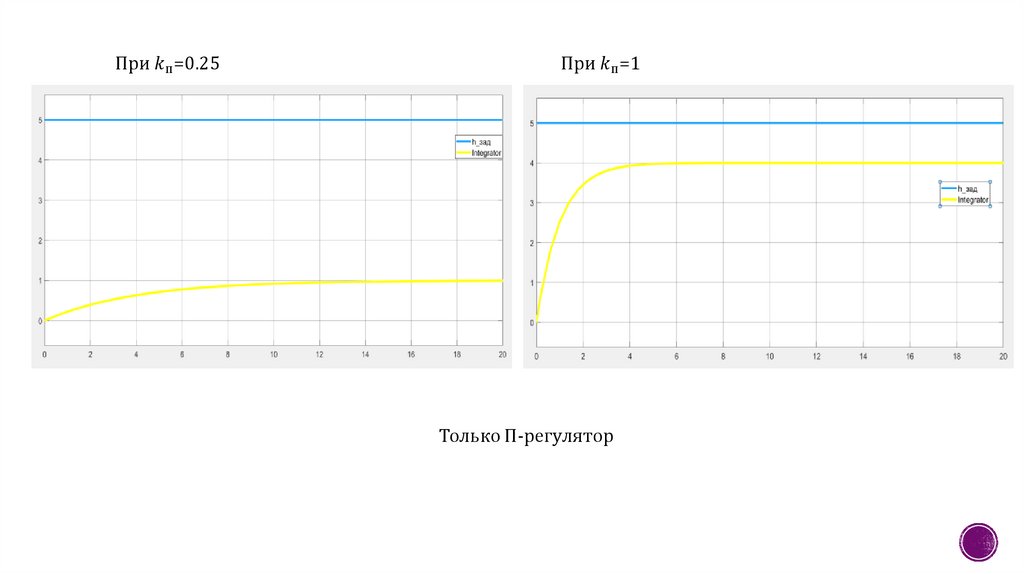
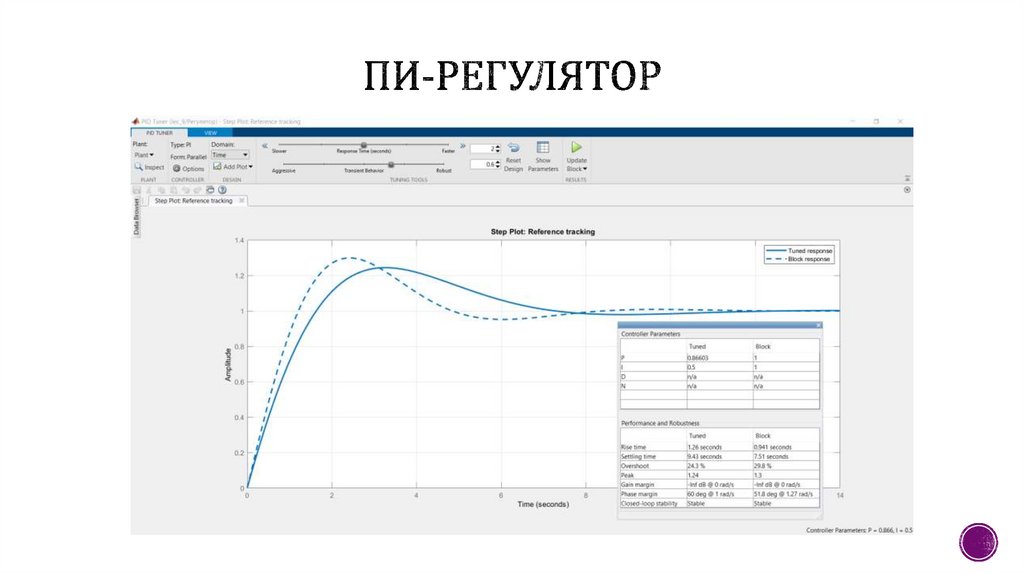
ПИД-управление
Несколько регуляторов, у каждого своя
Регулятор с классической схемой и
Многоконтурная система управления.
Основная задача – правильный подбор
задача.
передаточной функций.
параметров регулятора.