








 electronics
electronicsSimilar presentations:

![3.2. Лабиринт. Подпрограммы. Энкодеры [ТРИК]](https://cf.ppt-online.org/files/thumb/v/VT9rybitPBu6f8aDoc4dmM1QIXOpgNk3GF0sKh.jpg "3.2. Лабиринт. Подпрограммы. Энкодеры [ТРИК]")
![2.2. Элементарные действия. Алгоритмические структуры [ТРИК]](https://cf.ppt-online.org/files/thumb/q/QPLfHO5svuzVmEi6IoWRDal3MyKkprtNCxne7F.jpg "2.2. Элементарные действия. Алгоритмические структуры [ТРИК]")

")





Система управления. Релейный регулятор. Силовой мотор
1.
Урок 4.2 Система управленияРелейный регулятор. Силовой мотор
Широколобов И. Ю.
Эти материалы распространяются по лицензии Creative Commons «Attribution-NonCommercial-ShareAlike»
(«Атрибуция — Некоммерческое использование — На тех же условиях») 3.0 Непортированная. Чтобы ознакомиться
с экземпляром этой лицензии, посетите http://creativecommons.org/licenses/by-nc-sa/3.0/ или отправьте письмо
на адрес Creative Commons: 444 Castro Street, Suite 900, Mountain View, California, 94041, USA
Санкт-Петербург, 2015
2.
Система управлениявнешние
воздействия
начальные
значения
Объект
управления
выходной сигнал
состояние
Объект управления: механическая система, электронная система, робот
и т.д.
Состояние: может описываться по-разному в зависимости от задачи
(например, координаты робота)
Начальные значения: входной сигнал, задающий начальное состояние
Внешние воздействия: ветер, свет и т.д.
Такая система
неуправляема!
CC BY-NC-SA (C) ООО «КиберТех»
2015
3.
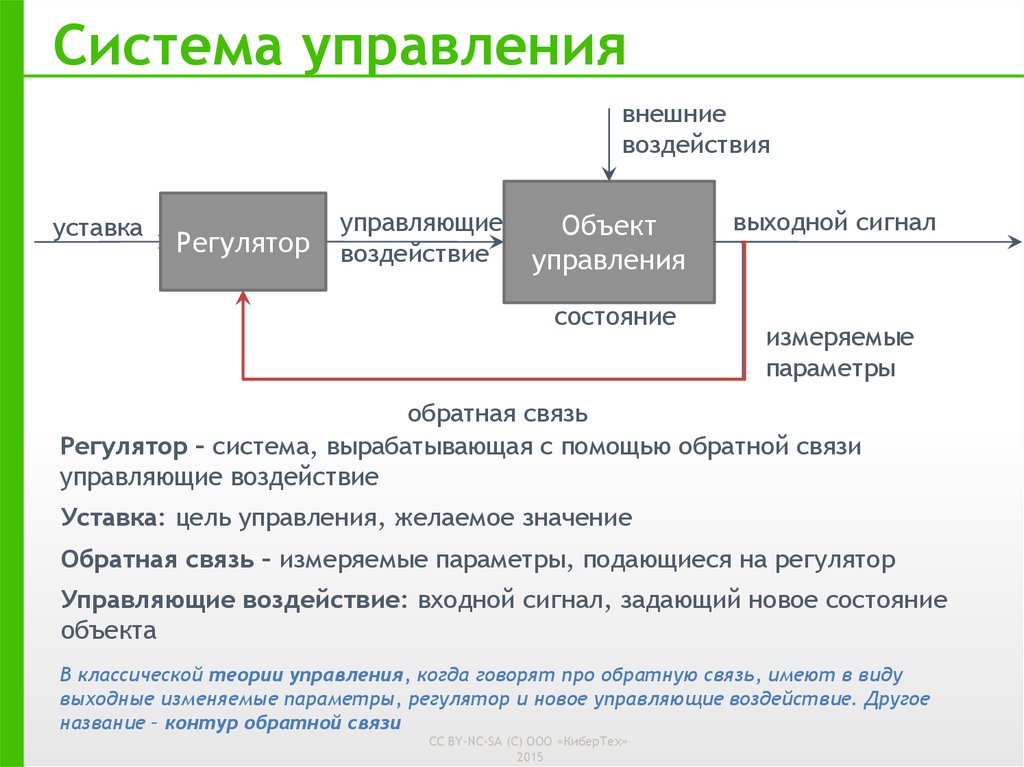
Система управлениявнешние
воздействия
уставка
Регулятор
управляющие
воздействие
Объект
управления
состояние
выходной сигнал
измеряемые
параметры
обратная связь
Регулятор – система, вырабатывающая с помощью обратной связи
управляющие воздействие
Уставка: цель управления, желаемое значение
Обратная связь – измеряемые параметры, подающиеся на регулятор
Управляющие воздействие: входной сигнал, задающий новое состояние
объекта
В классической теории управления, когда говорят про обратную связь, имеют в виду
выходные изменяемые параметры, регулятор и новое управляющие воздействие. Другое
название – контур обратной связи
CC BY-NC-SA (C) ООО «КиберТех»
2015
4.
Ножка под угломЗадача: поставить ножку под углом 90 градусов
Модель: силовой мотор с несимметричной деталью
CC BY-NC-SA (C) ООО «КиберТех»
2015
5.
Ножка под угломВозьмите муфту колеса и закрепите её на оси силового мотора с помощью
винтика М3 и среднего шестигранника.
Не перетягивайте слишком сильно, чтобы не стереть резьбу
CC BY-NC-SA (C) ООО «КиберТех»
2015
6.
Ножка под угломВозьмите уголок 5х1х1 и закрепите на муфте с помощью винтика М4
CC BY-NC-SA (C) ООО «КиберТех»
2015
7.
Ножка под угломВозьмите проводок к силовому мотору: штекер с 2 ножками – питание,
красный штекер – энкодер
Воткните белый штекер в мотор
CC BY-NC-SA (C) ООО «КиберТех»
2015
8.
Ножка под угломУ красного штекера имеется ножка. При подключение к контроллеру ножка
должна быть справа и попасть в соответствующий паз
Выполняя условие выше, подключите энкодер и питание
Вы могли заметить, что питание можно подключить двумя способами. От
положение ножек штекера зависит направление вращения мотора
CC BY-NC-SA (C) ООО «КиберТех»
2015
9.
Релейный регуляторСистема состояний. Регулятор переключается между двумя состояниями
Начало
нет
Условие
Состояние 1
да
Состояние 2
CC BY-NC-SA (C) ООО «КиберТех»
2015
10.
Релейный регуляторСистема состояний. Регулятор переключается между тремя состояниями.
Начало
нет
да
Условие 1
нет
Состояние 1
Состояние 2
CC BY-NC-SA (C) ООО «КиберТех»
2015
Условие
2
да
Состояние 3
11.
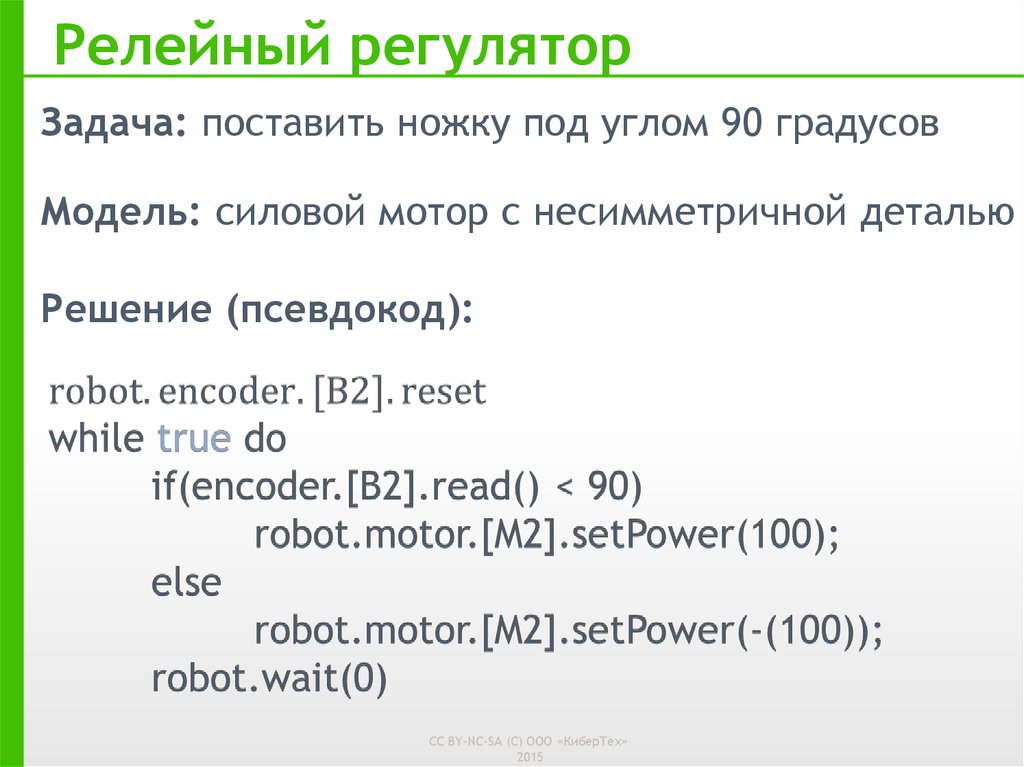
Релейный регуляторЗадача: поставить ножку под углом 90 градусов
Модель: силовой мотор с несимметричной деталью
Решение (псевдокод):
CC BY-NC-SA (C) ООО «КиберТех»
2015
12.
Релейный регуляторЗадача: поставить ножку под углом 90 градусов
Модель: силовой мотор с несимметричной деталью
Алгоритм решения задачи в ТРИК Студии
CC BY-NC-SA (C) ООО «КиберТех»
2015