
 electronics
electronicsSimilar presentations:

")
![3.2. Лабиринт. Подпрограммы. Энкодеры [ТРИК]](https://cf.ppt-online.org/files/thumb/v/VT9rybitPBu6f8aDoc4dmM1QIXOpgNk3GF0sKh.jpg "3.2. Лабиринт. Подпрограммы. Энкодеры [ТРИК]")
![2.2. Элементарные действия. Алгоритмические структуры [ТРИК]](https://cf.ppt-online.org/files/thumb/q/QPLfHO5svuzVmEi6IoWRDal3MyKkprtNCxne7F.jpg "2.2. Элементарные действия. Алгоритмические структуры [ТРИК]")



![2.1. Знакомство с ТРИК Студией [ТРИК]](https://cf.ppt-online.org/files/thumb/m/mKkdXNbst0wVi6YrGaQoJZ1j7FDhRyBvE3cpfu.jpg "2.1. Знакомство с ТРИК Студией [ТРИК]")


Пропорциональный регулятор. Силовой мотор
1.
Урок 5.1 Пропорциональныйрегулятор
Широколобов И. Ю.
Эти материалы распространяются по лицензии Creative Commons «Attribution-NonCommercial-ShareAlike»
(«Атрибуция — Некоммерческое использование — На тех же условиях») 3.0 Непортированная. Чтобы ознакомиться
с экземпляром этой лицензии, посетите http://creativecommons.org/licenses/by-nc-sa/3.0/ или отправьте письмо
на адрес Creative Commons: 444 Castro Street, Suite 900, Mountain View, California, 94041, USA
Санкт-Петербург, 2015
2.
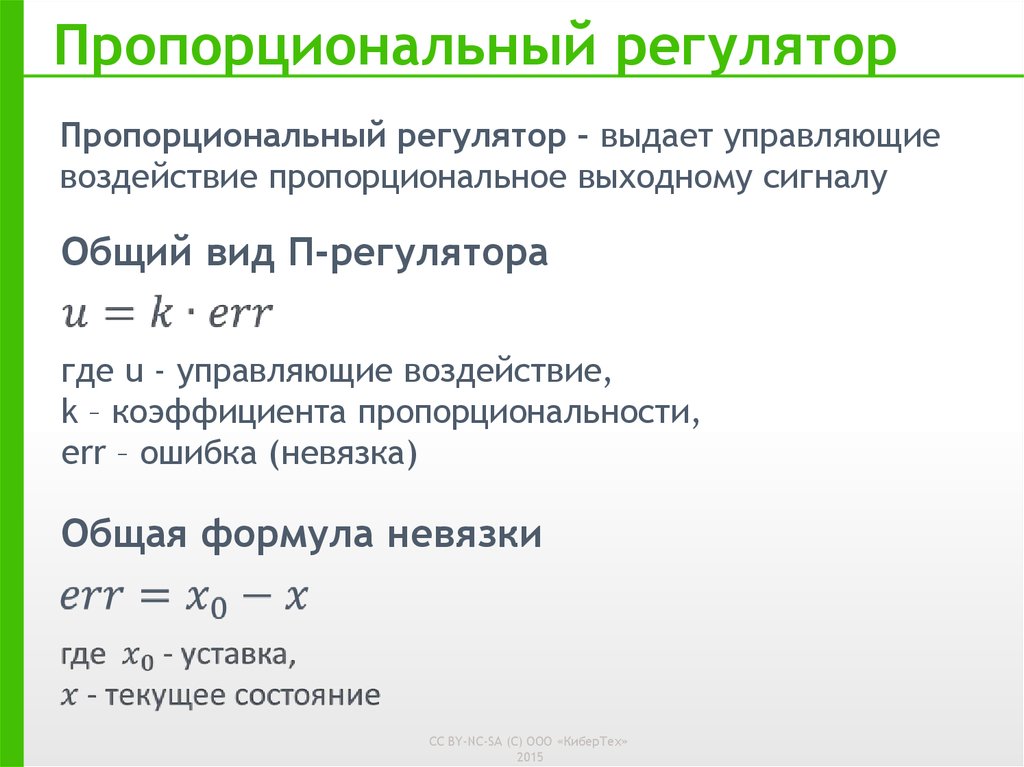
Пропорциональный регуляторПропорциональный регулятор – выдает управляющие
воздействие пропорциональное выходному сигналу
Общий вид П-регулятора
где u - управляющие воздействие,
k – коэффициента пропорциональности,
err – ошибка (невязка)
Общая формула невязки
CC BY-NC-SA (C) ООО «КиберТех»
2015
3.
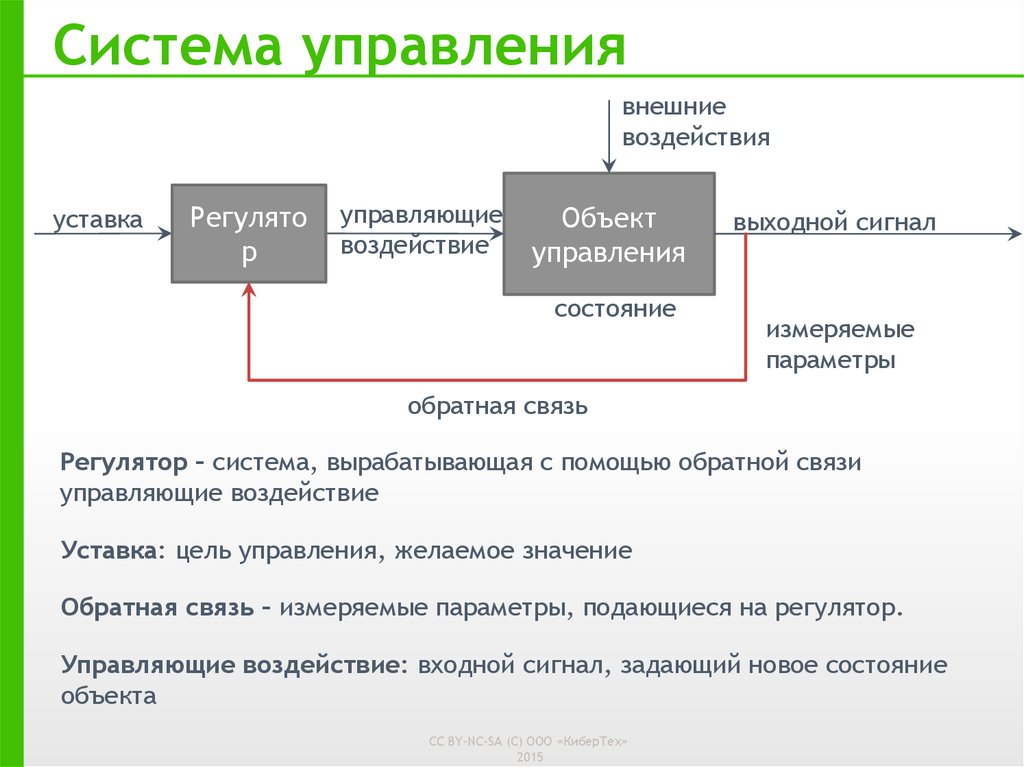
Система управлениявнешние
воздействия
уставка
Регулято
р
управляющие
воздействие
Объект
управления
состояние
выходной сигнал
измеряемые
параметры
обратная связь
Регулятор – система, вырабатывающая с помощью обратной связи
управляющие воздействие
Уставка: цель управления, желаемое значение
Обратная связь – измеряемые параметры, подающиеся на регулятор.
Управляющие воздействие: входной сигнал, задающий новое состояние
объекта
CC BY-NC-SA (C) ООО «КиберТех»
2015
4.
Ножка под углом (П-регулятор)Задача: поставить ножку под
углом 90 градусов
Блок-схема алгоритма
Начало
Уставка
Модель: силовой мотор с
несимметричной деталью
Условие
Ошибка
В программировании бесконечные циклы «плохой»
стиль, но при программировании роботов мы будем
часто их использовать
Управляющие
воздействие
Подать
мощность на
мотор М2
CC BY-NC-SA (C) ООО «КиберТех»
2015
5.
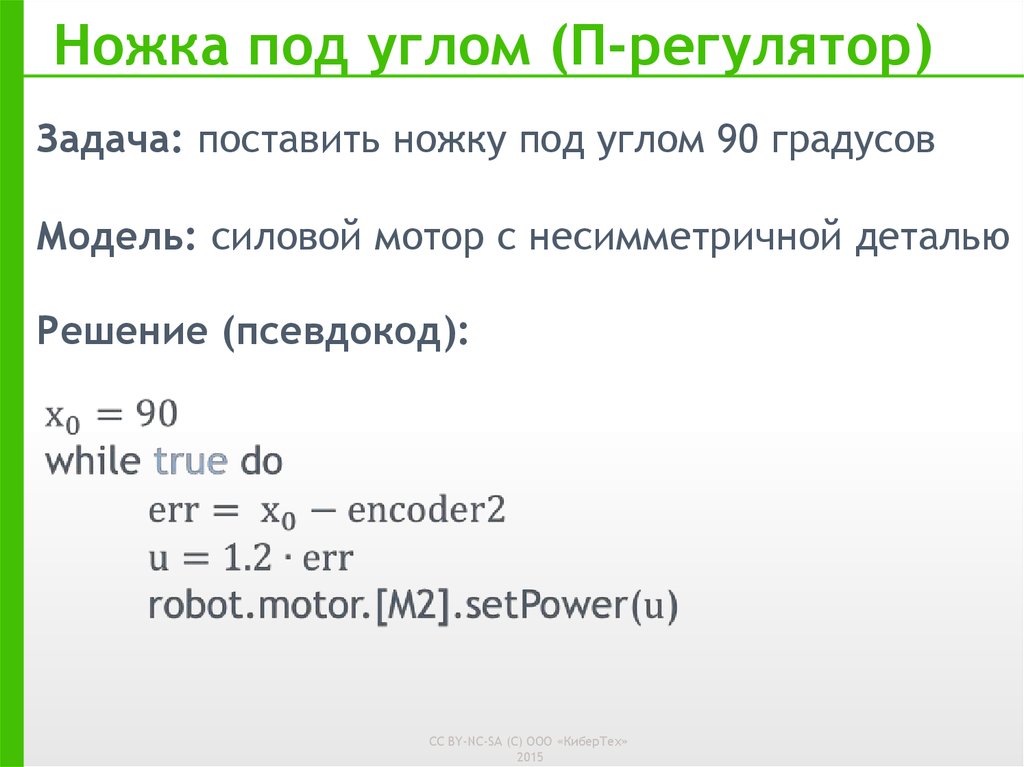
Ножка под углом (П-регулятор)Задача: поставить ножку под углом 90 градусов
Модель: силовой мотор с несимметричной деталью
Решение (псевдокод):
CC BY-NC-SA (C) ООО «КиберТех»
2015
6.
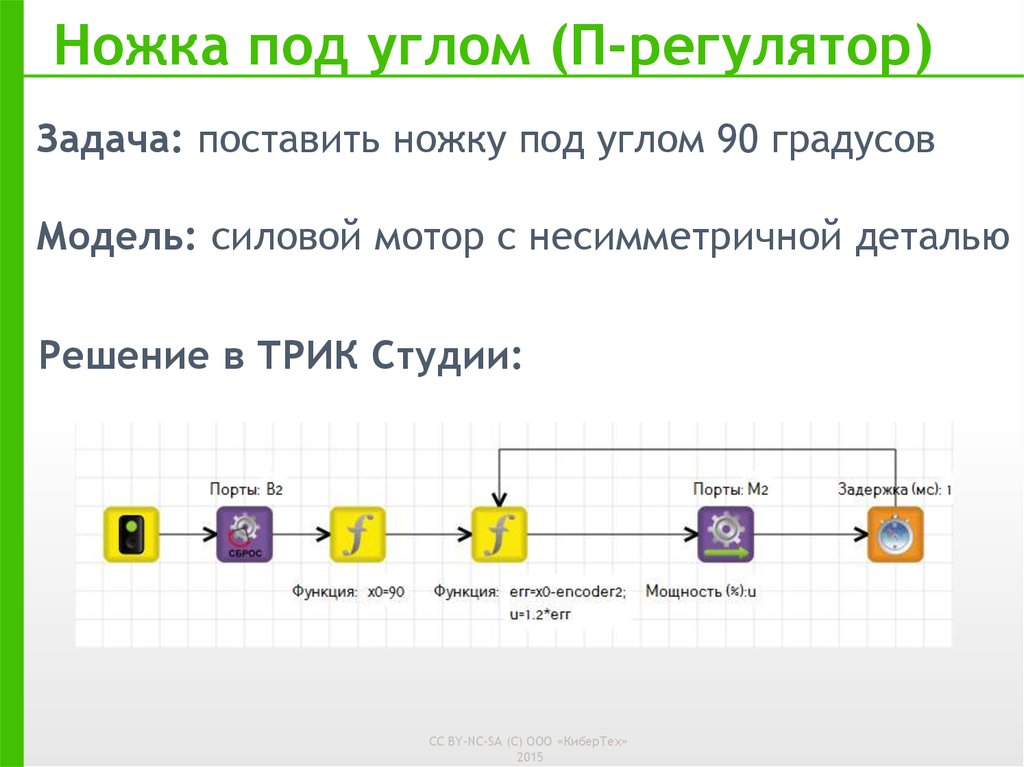
Ножка под углом (П-регулятор)Задача: поставить ножку под углом 90 градусов
Модель: силовой мотор с несимметричной деталью
Решение в ТРИК Студии:
CC BY-NC-SA (C) ООО «КиберТех»
2015