






 physics
physicsSimilar presentations:










Моделирование движения жидкости под воздействием поршня
1. Моделирование движения жидкости под воздействием поршня
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
КЕМЕРОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Математический факультет
Кафедра ЮНЕСКО по новым информационным технологиям
Моделирование движения
жидкости под воздействием
поршня
Работу выполнил:
ст-т группы М-112
Мазепа Е.Е.
Научный руководитель:
канд. физ.-мат. наук Стуколов С.В.
1
2. Актуальность
Волна – это потенциальное опасное явлениедля плавающих и закрепленных на воде
сооружений.
2
3. Цель
Созданиечисленной
модели
работы
волнопродуктора
поршневого
типа
комплексным методом граничных элементов
и определения диапазона скоростей поршня
для получения необрушающиеся волны.
3
4. Задачи
1. Реализация КМГЭ1.
Тестирование методом пробных функций
2. Реализация алгоритма движения по времени
1.
2.
3.
Реализация алгоритма вычисления поля скоростей
Реализация алгоритмов проверки законов сохранения массы и
полной энергии
Тестирование на решении задачи о колебании жидкости под
действием силы тяжести
3. Решение задачи о разгонном движении поршня до
постоянной скорости
1.
2.
Модификация алгоритма расчета с учетом движущегося тела
Определение диапазона скоростей движения поршня, при
котором порождается необрушающаяся волна
4
5. Постановка задачи
Дана область течения D, ограниченнаятвердыми стенками, свободной границей и
твердой перемещающейся стенкой.
На области решается уравнение Лапласа:
w z, t 0, z z x, y D
(1)
На твердых границах выполняются условия не
протекания: 0, z C1, C2.
(2)
5
6.
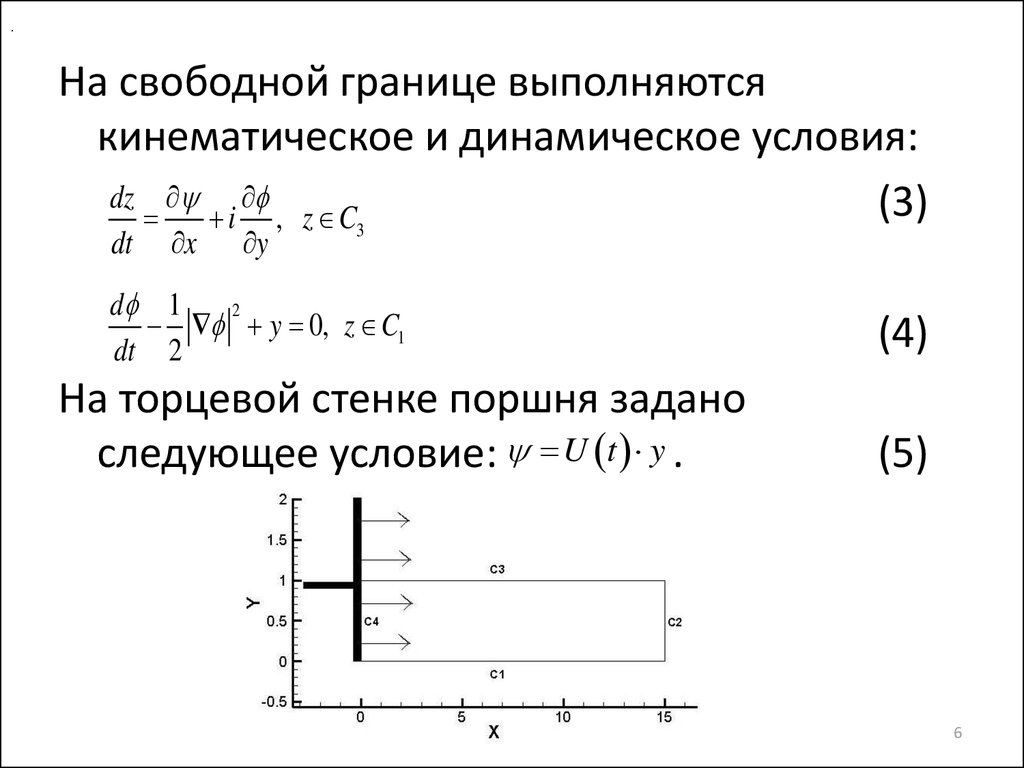
.На свободной границе выполняются
кинематическое и динамическое условия:
dz
(3)
i , z C3
dt
x
y
d 1
2
y 0, z C1
dt 2
На торцевой стенке поршня задано
следующее условие: U t y .
(4)
(5)
6
7. Алгоритм решения
Краевая задача (1)-(5) в которой время явновходит только в (3) и (4). Данные уравнения
представляют
собой
обыкновенные
дифференциальные уравнения первого
порядка, для интегрирования которых
используется явный метод Эйлера.
Задаем
первоначальное
положение
свободной границы и расположение
0
потенциала на ней.
7
8.
Для определения положения свободнойграницы и вычисления потенциала на ней в
определенный момент времени находятся
по формулам (6) и (7):
k
k 1
k
(6)
z z
k 2
k 1
k
(7)
0.5 y k , k 0,1,2...
где
k , yk , zk
- значение функции на k шаге.
8
9.
После получения новой смешанной краевойзадачи с условиями (2), (5) и (7)
необходимо определить значение функции
тока на С3 и потенциала скорости на С1, С2,
С4
используя
комплексный
метод
граничных элементов, в основе которого
лежит интегральная формула Коши:
w z
1
w( z0 )
dz
z0 i C z z 0
9
10.
z0для точки на границе С, для
внутренней точки , а для угловой точки
z0 . Обход области будет иметь
положительное направление.
Для получения численного решения
необходимо разбить С на N линейных
элементов Гj узлами zj (j=1,N).
Тогда w z lim G z , G z - глобальная
max j G z
N
линейная пробная функция для z
j 1
j
N
и G z w z
j 1
j
10
11.
После разбиения и линейной аппроксимациифункции w(z) на границе интеграл Коши
можно вычислить аналитически в смысле
главного значения при z z j .
В результате получаем СЛАУ:
iw j w j 1 w j 1 w j ln
z j 1 z j
z j 1 z j
N
m 1
m j
m j 1
wm 1
z j zm wm 1 z j zm 1 wm zm 1 z j
wm
ln
zm 1 zm zm z j
zm 1 zm
.
11
12.
После нахождения значения функций тока ипотенциала скорости на всей границе D
требуется вычислить компоненты скорости
вектора скорости. Из условия Коши-Римана
получаем, что
Ux
, Uy
, U x iU y w z
x x
y
x
Для нахождения производных
использовалось приближение функций
комплексного потенциала полиномом
Лагранжа.
12
13. Тестовые решения
Были проведено тестирование КМГЭ иалгоритма нахождения компонента вектора
скорости методом пробных функций.
Контроль точности вычислений и проверка
правильности решения алгоритма по
времени была проведена на основе
законов сохранения массы и полной
энергии.
13