Similar presentations:


")







Колебания узлов и деталей
1.
КОЛЕБАНИЯ УЗЛОВ И ДЕТАЛЕЙЛекция 10
Прецессия роторов
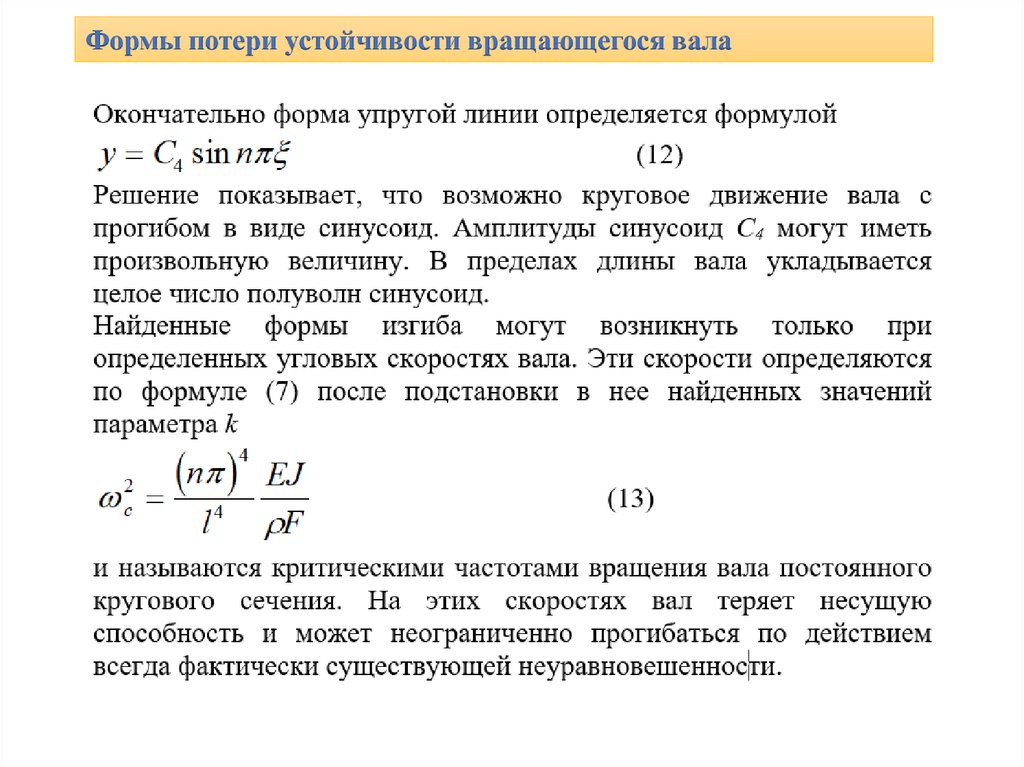
Формы потери устойчивости вала
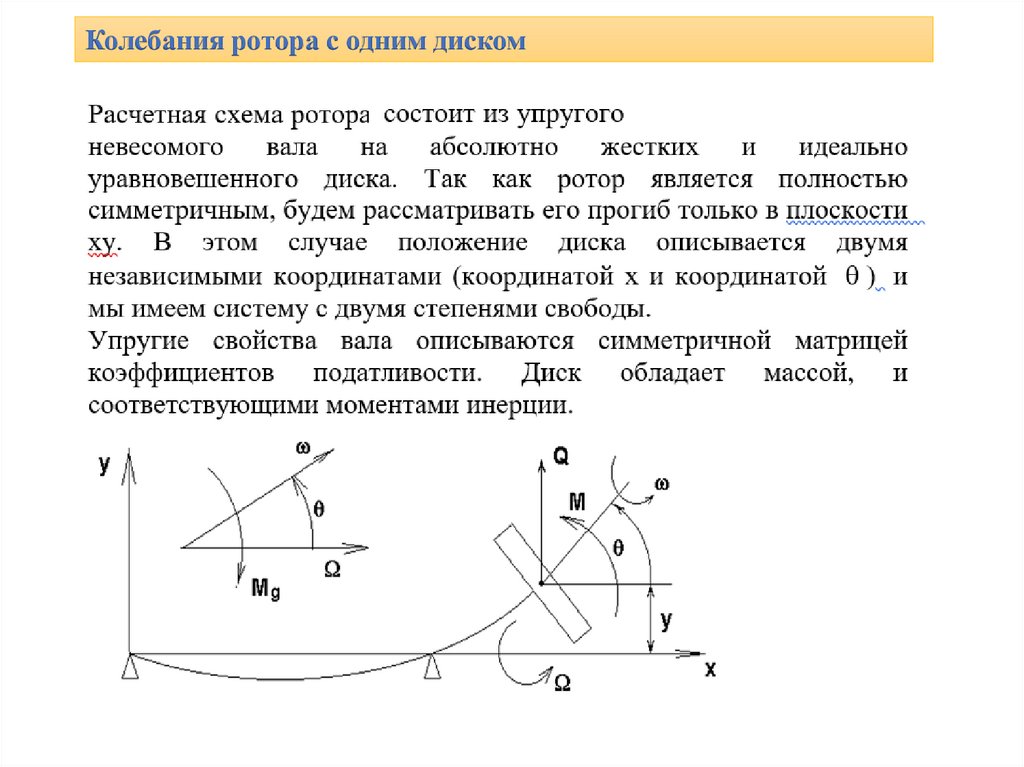
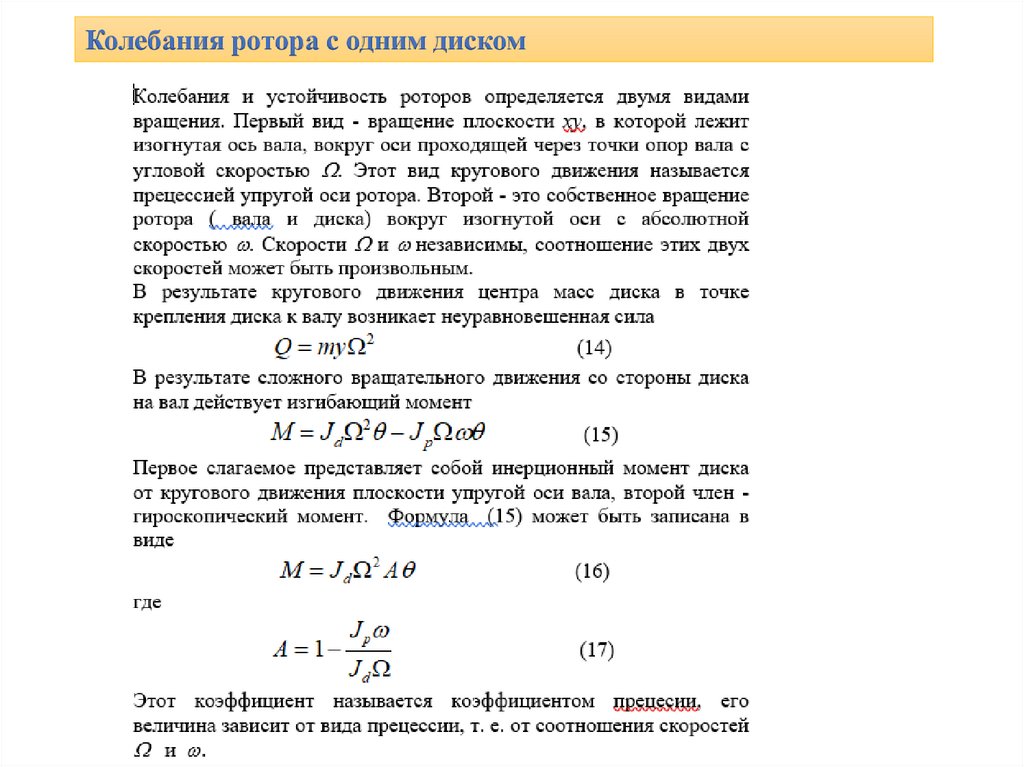
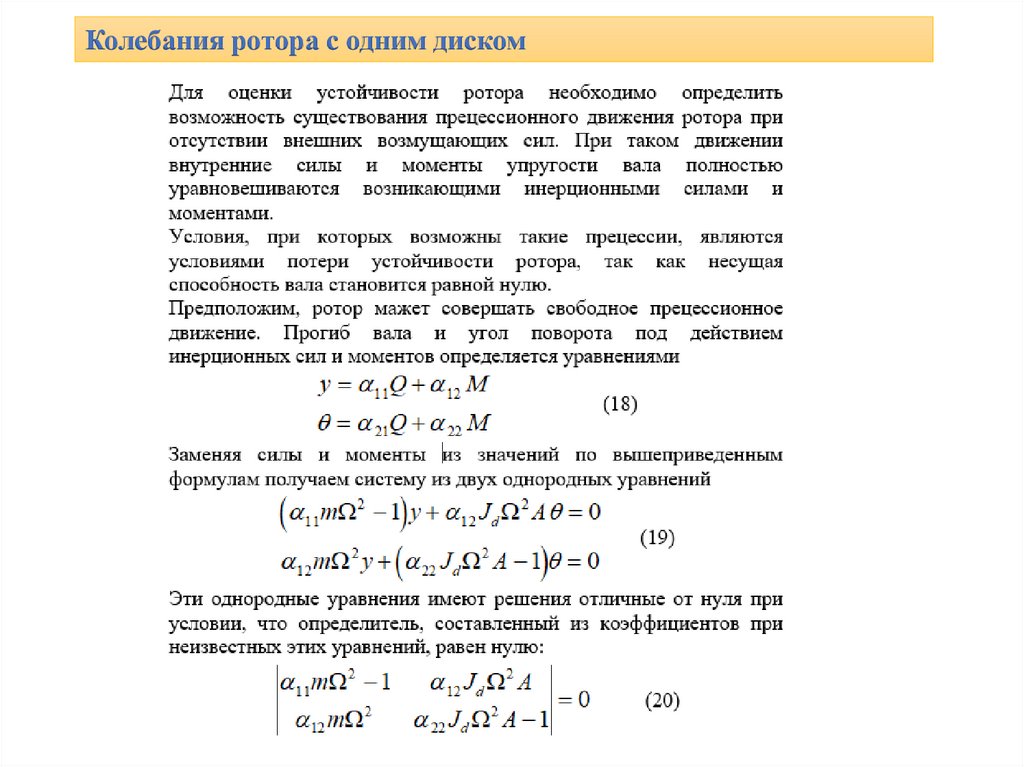
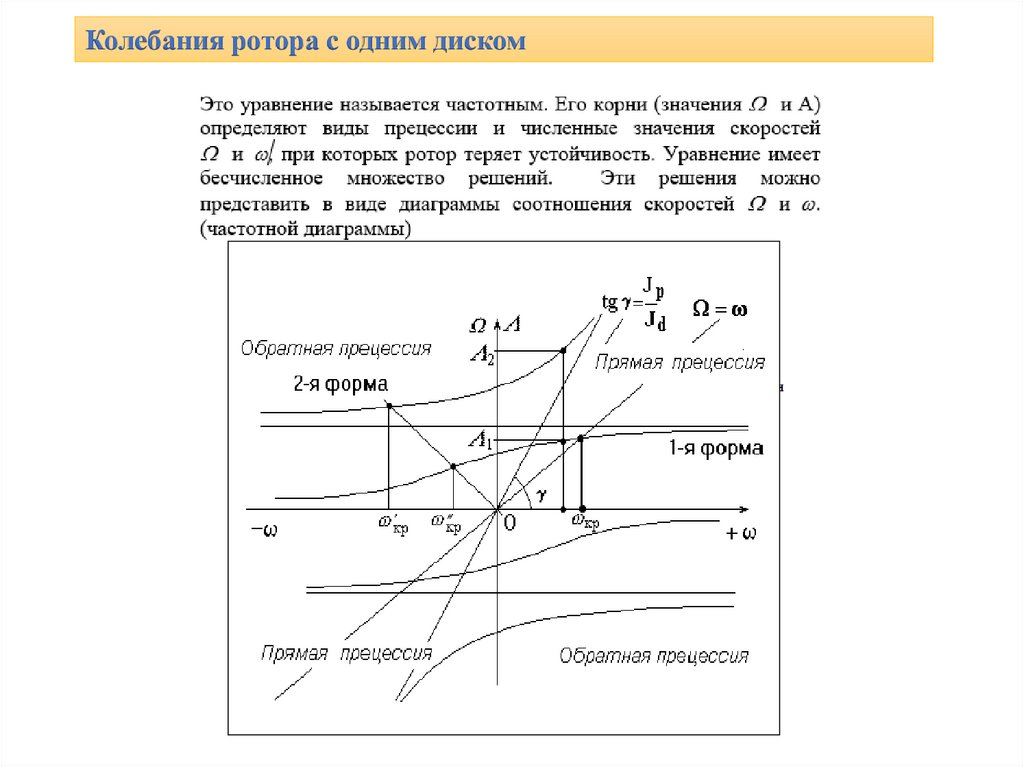
Колебания ротора с одним диском
Частотная диаграмма
Ротор с центральным диском
1
2.
Прецессия роторов, частотная диаграмма2
3.
Прецессия роторовТехнологические отклонения и неточности, при изготовлении деталей роторов и
их сборке, приводят к тому, что их центры тяжести не совпадают с продольной осью
ротора, т.е. имеется механический дисбаланс ротора. При вращении ротора от
дисбаланса возникают неуравновешенные (инерционные) силы, которые вращаются
вместе с ротором, изгибают его и при определенных условиях приводят к потере
устойчивости.
Под действием этих сил ротор помимо собственного вращения совершает другое
достаточно сложное движение (прецессию). Прецессия определяется как вращение
изогнутой оси вала ротора относительно его опор и зависит от многих факторов -
величины
дисбалансов,
упругости
опор
роторов,
демпфирования
в
роторе,
гироскопических сил и т.д. Прецессия ротора может быть прямой и обратной,
синхронной и несинхронной.
Рассмотрим простейший случай прецессионного движения ротора под действием
дисбаланса - синхронную прецессию, при которой частота прецессии равна частоте
собственного вращения вала ротора. Такой случай прецессионного движения наиболее
часто встречается в практике.
3
4.
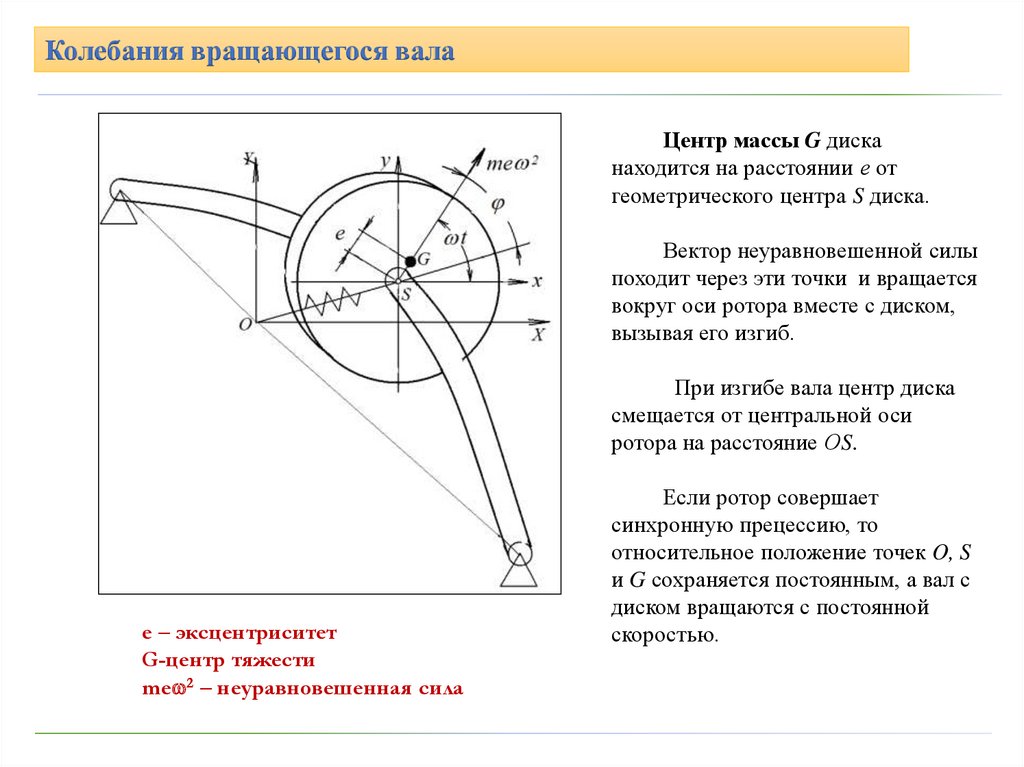
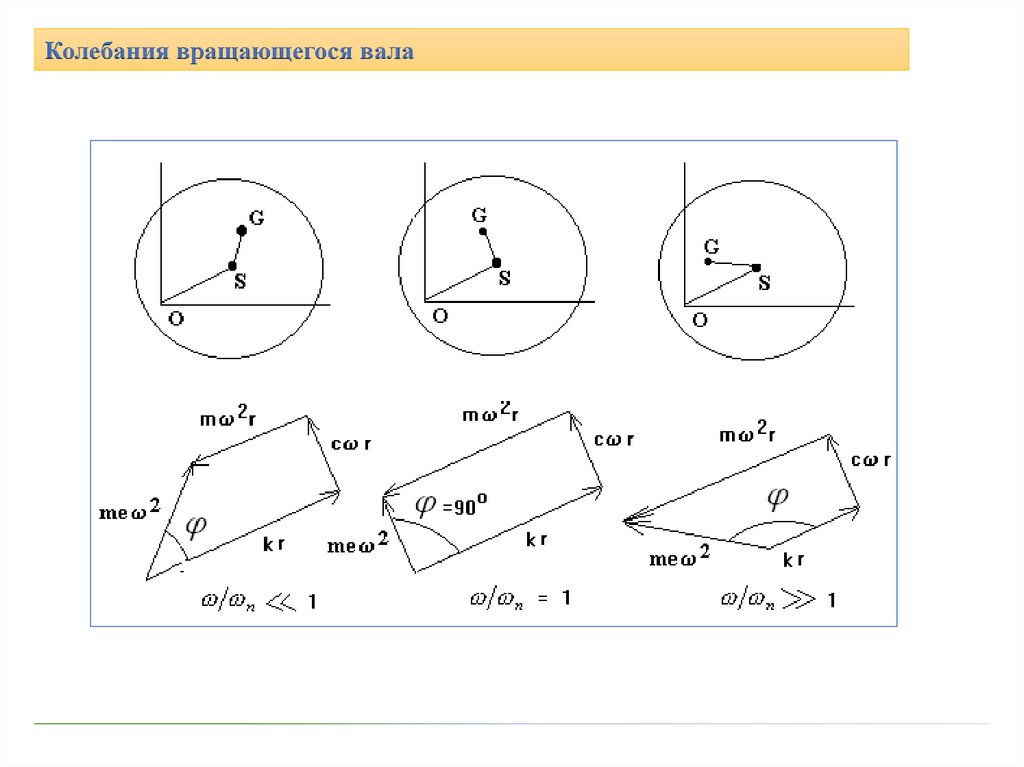
Колебания вращающегося валаЦентр массы G диска
находится на расстоянии е от
геометрического центра S диска.
Вектор неуравновешенной силы
походит через эти точки и вращается
вокруг оси ротора вместе с диском,
вызывая его изгиб.
При изгибе вала центр диска
смещается от центральной оси
ротора на расстояние ОS.
e – эксцентриситет
G-центр тяжести
mew2 – неуравновешенная сила
Если ротор совершает
синхронную прецессию, то
относительное положение точек O, S
и G сохраняется постоянным, а вал с
диском вращаются с постоянной
скоростью.
5.
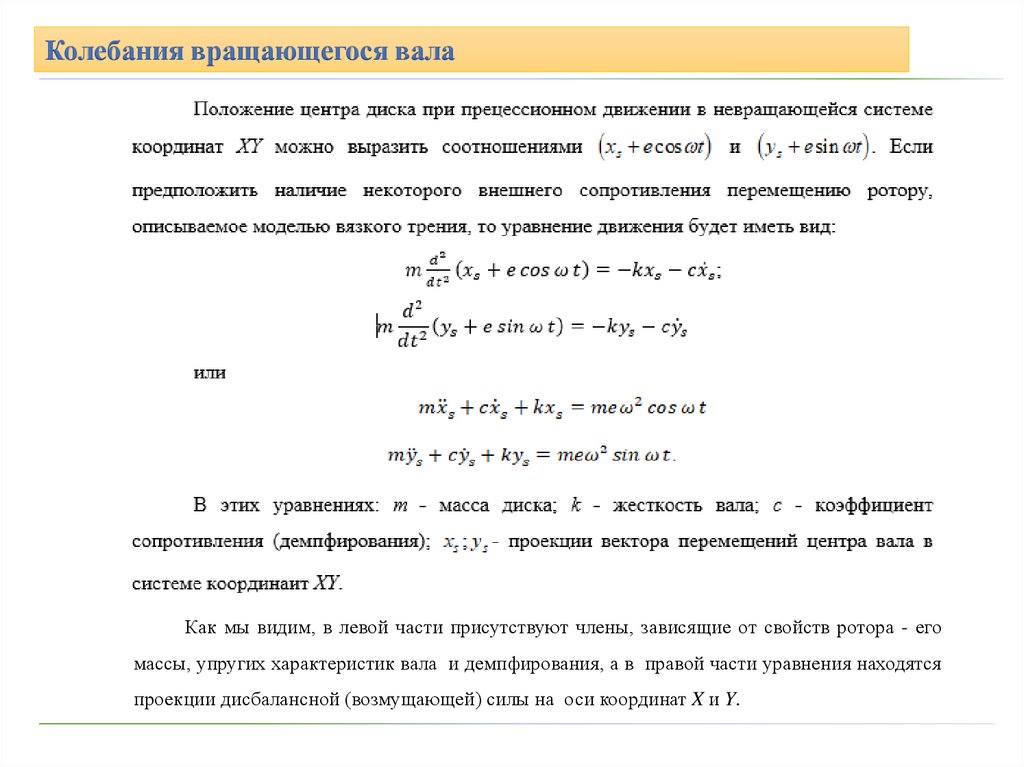
Колебания вращающегося валаКак мы видим, в левой части присутствуют члены, зависящие от свойств ротора - его
массы, упругих характеристик вала и демпфирования, а в правой части уравнения находятся
проекции дисбалансной (возмущающей) силы на оси координат X и Y.
6.
Колебания вращающегося вала7.
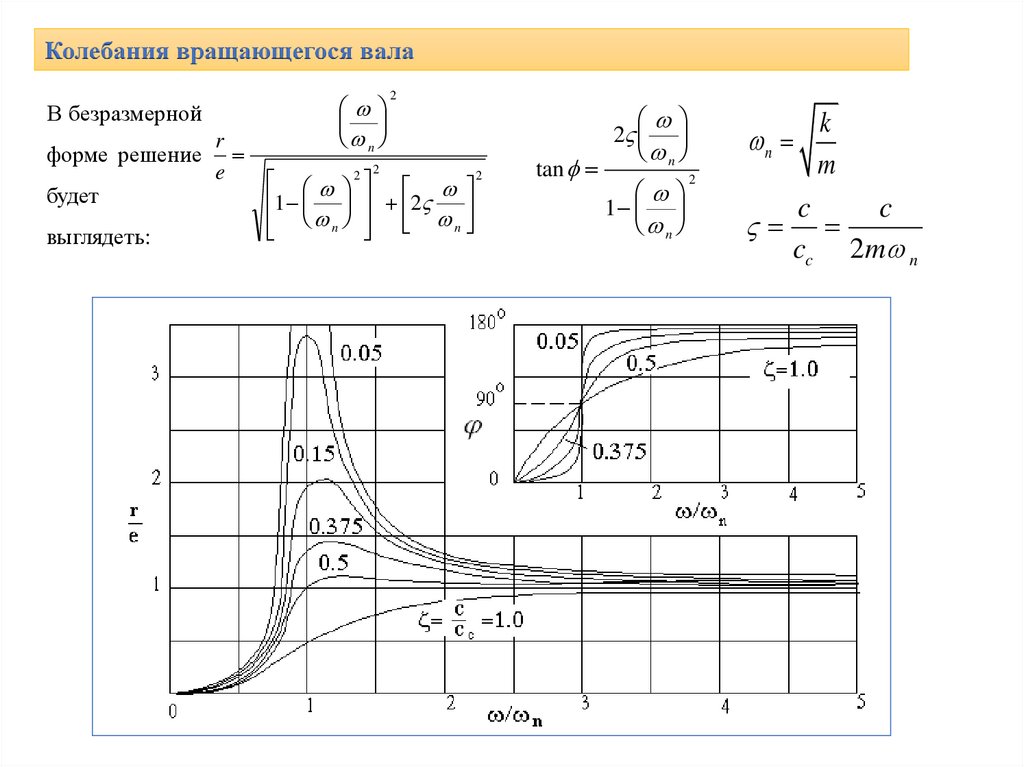
Колебания вращающегося валаВ безразмерной
r
форме решение
e
будет
выглядеть:
w
wn
2
2
w 2 w 2
1 2
w n w n
tan
w
2
wn
w
1
wn
wn
2
k
m
c
c
cc 2mw n
8.
Колебания вращающегося вала9.
Колебания вращающегося вала10.
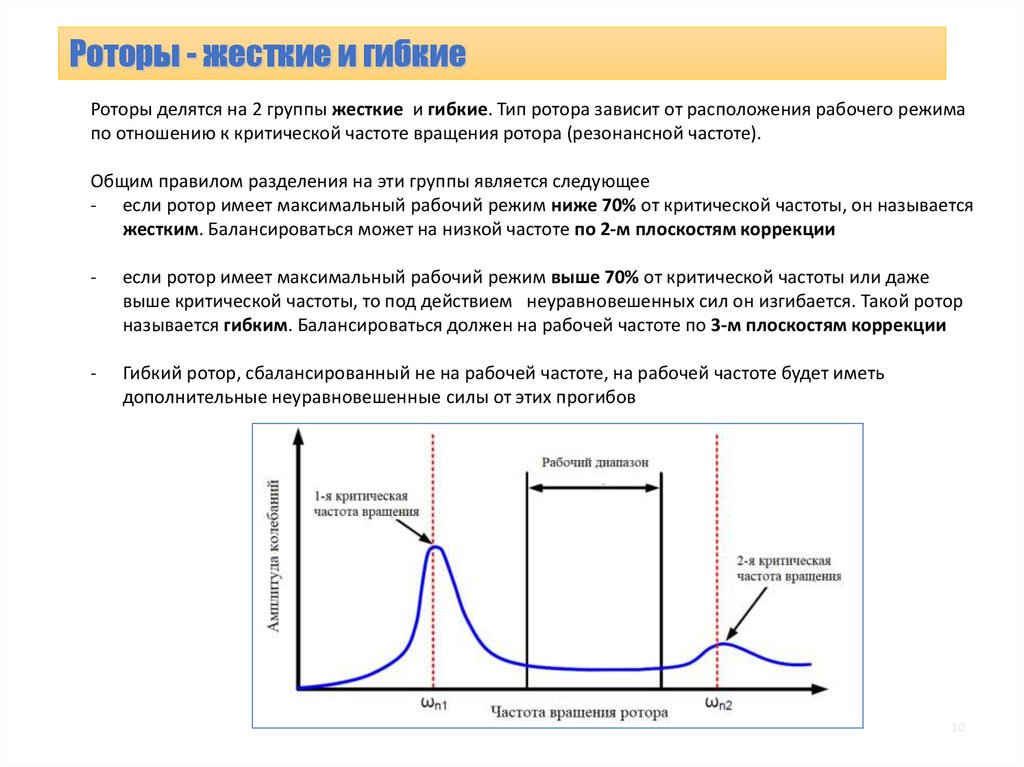
Роторы - жесткие и гибкиеРоторы делятся на 2 группы жесткие и гибкие. Тип ротора зависит от расположения рабочего режима
по отношению к критической частоте вращения ротора (резонансной частоте).
Общим правилом разделения на эти группы является следующее
- если ротор имеет максимальный рабочий режим ниже 70% от критической частоты, он называется
жестким. Балансироваться может на низкой частоте по 2-м плоскостям коррекции
-
если ротор имеет максимальный рабочий режим выше 70% от критической частоты или даже
выше критической частоты, то под действием неуравновешенных сил он изгибается. Такой ротор
называется гибким. Балансироваться должен на рабочей частоте по 3-м плоскостям коррекции
-
Гибкий ротор, сбалансированный не на рабочей частоте, на рабочей частоте будет иметь
дополнительные неуравновешенные силы от этих прогибов
10
11.
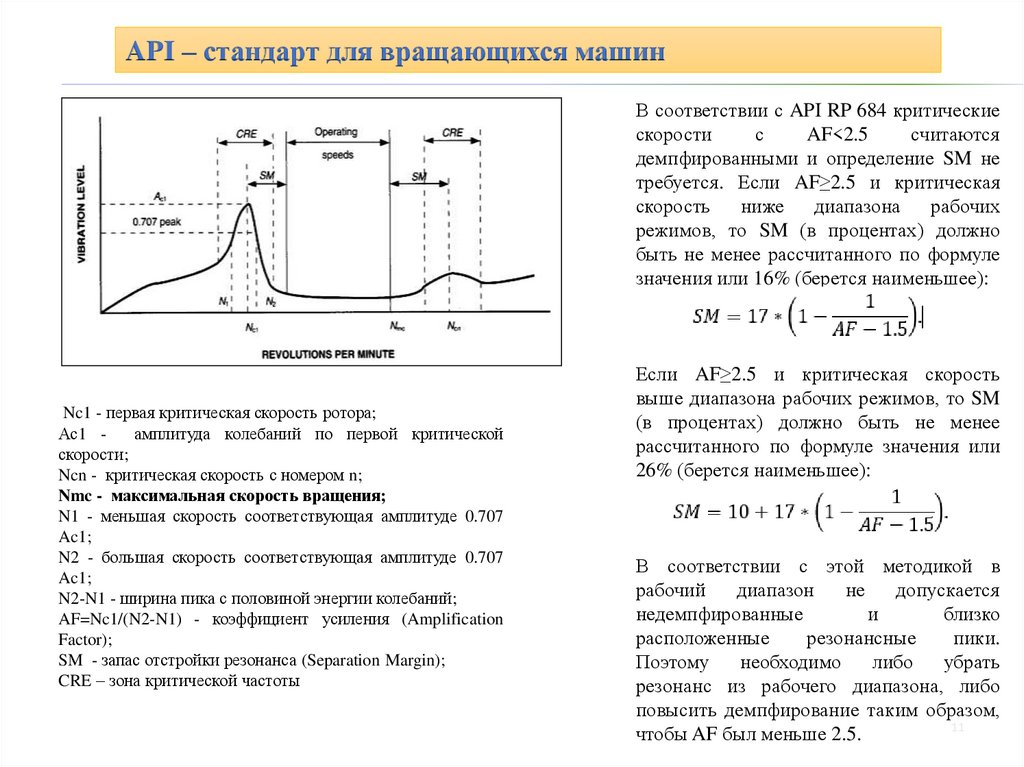
API – стандарт для вращающихся машинВ соответствии с API RP 684 критические
скорости
с
AF<2.5
считаются
демпфированными и определение SM не
требуется. Если AF≥2.5 и критическая
скорость ниже диапазона
рабочих
режимов, то SM (в процентах) должно
быть не менее рассчитанного по формуле
значения или 16% (берется наименьшее):
Nc1 - первая критическая скорость ротора;
Ас1 амплитуда колебаний по первой критической
скорости;
Ncn - критическая скорость с номером n;
Nmc - максимальная скорость вращения;
N1 - меньшая скорость соответствующая амплитуде 0.707
Ac1;
N2 - большая скорость соответствующая амплитуде 0.707
Ac1;
N2-N1 - ширина пика с половиной энергии колебаний;
AF=Nc1/(N2-N1) - коэффициент усиления (Amplification
Factor);
SM - запас отстройки резонанса (Separation Margin);
CRE – зона критической частоты
Если AF≥2.5 и критическая скорость
выше диапазона рабочих режимов, то SM
(в процентах) должно быть не менее
рассчитанного по формуле значения или
26% (берется наименьшее):
В соответствии с этой методикой в
рабочий
диапазон
не
допускается
недемпфированные
и
близко
расположенные
резонансные
пики.
Поэтому
необходимо
либо
убрать
резонанс из рабочего диапазона, либо
повысить демпфирование таким образом,
11
чтобы AF был меньше 2.5.
12.
Частотная диаграмма – диаграмма Кэмпбелла,
12
13.
Колебания ротора с одним диском,
13
14.
Колебания ротора с одним диском,
14
15.
Виды прецессий упругой оси ротора,
15
16.
Колебания ротора с одним диском,
16
17.
Колебания ротора с одним диском,
17
18.
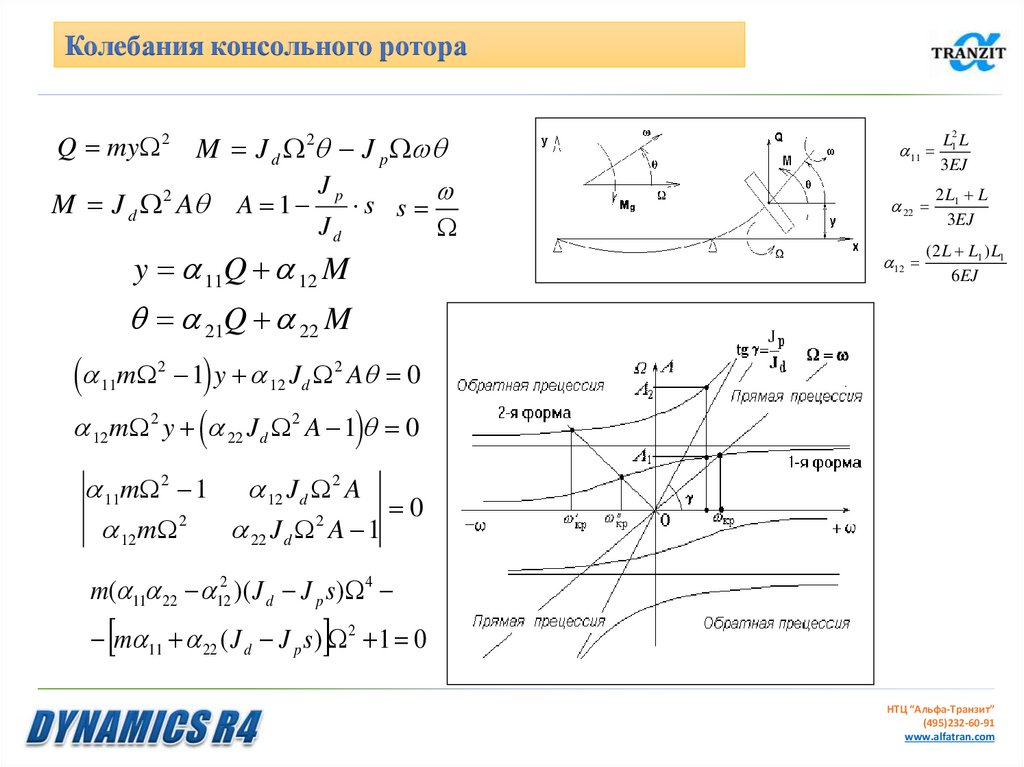
Колебания консольного ротораQ my 2 M J d 2 J p w
J
M J d 2 A A 1 p s s w
Jd
y 11Q 12 M
11
22
12
L12 L
3EJ
2 L1 L
3EJ
( 2 L L1 ) L1
6 EJ
21Q 22 M
m y
m 2 1 y 12 J d 2 A 0
11
12
2
22
Jd 2 A 1 0
11m 2 1 12 J d 2 A
0
2
2
12 m
22 J d A 1
m( 11 22 122 )( J d J p s ) 4
m 11 22 ( J d J p s ) 2 1 0
НТЦ “Альфа-Транзит”
(495)232-60-91
www.alfatran.com
19.
Формы потери устойчивостивращающегося вала
19
20.
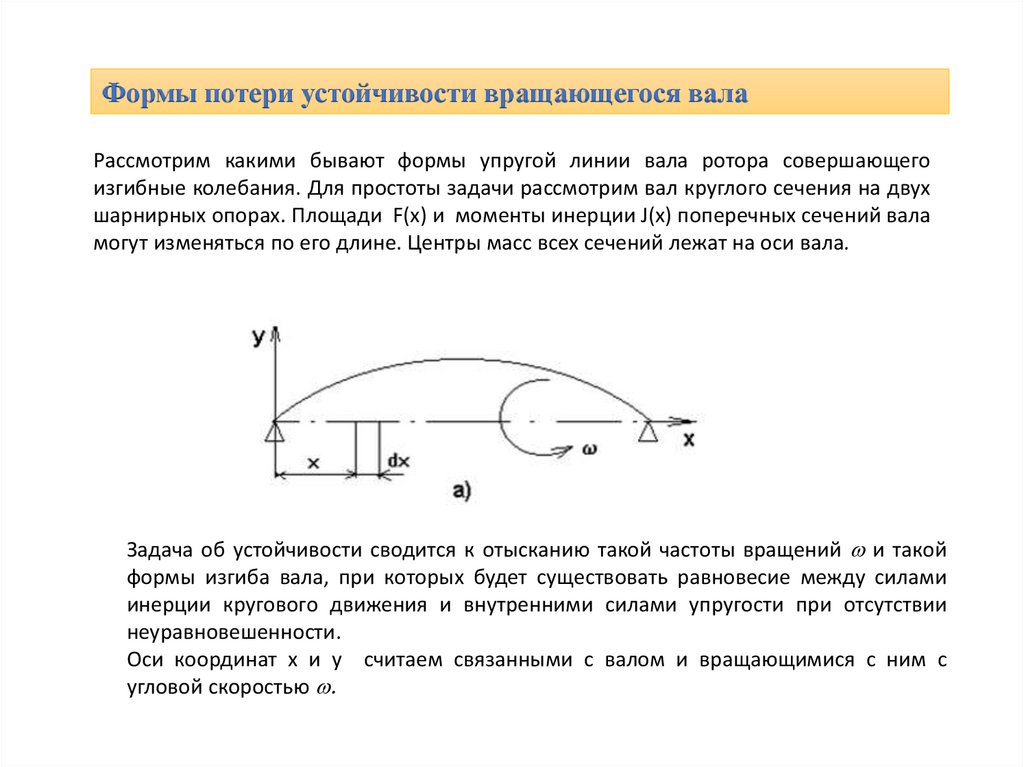
Формы потери устойчивости вращающегося валаРассмотрим какими бывают формы упругой линии вала ротора совершающего
изгибные колебания. Для простоты задачи рассмотрим вал круглого сечения на двух
шарнирных опорах. Площади F(x) и моменты инерции J(x) поперечных сечений вала
могут изменяться по его длине. Центры масс всех сечений лежат на оси вала.
Задача об устойчивости сводится к отысканию такой частоты вращений w и такой
формы изгиба вала, при которых будет существовать равновесие между силами
инерции кругового движения и внутренними силами упругости при отсутствии
неуравновешенности.
Оси координат x и y считаем связанными с валом и вращающимися с ним с
угловой скоростью w.
20
21.
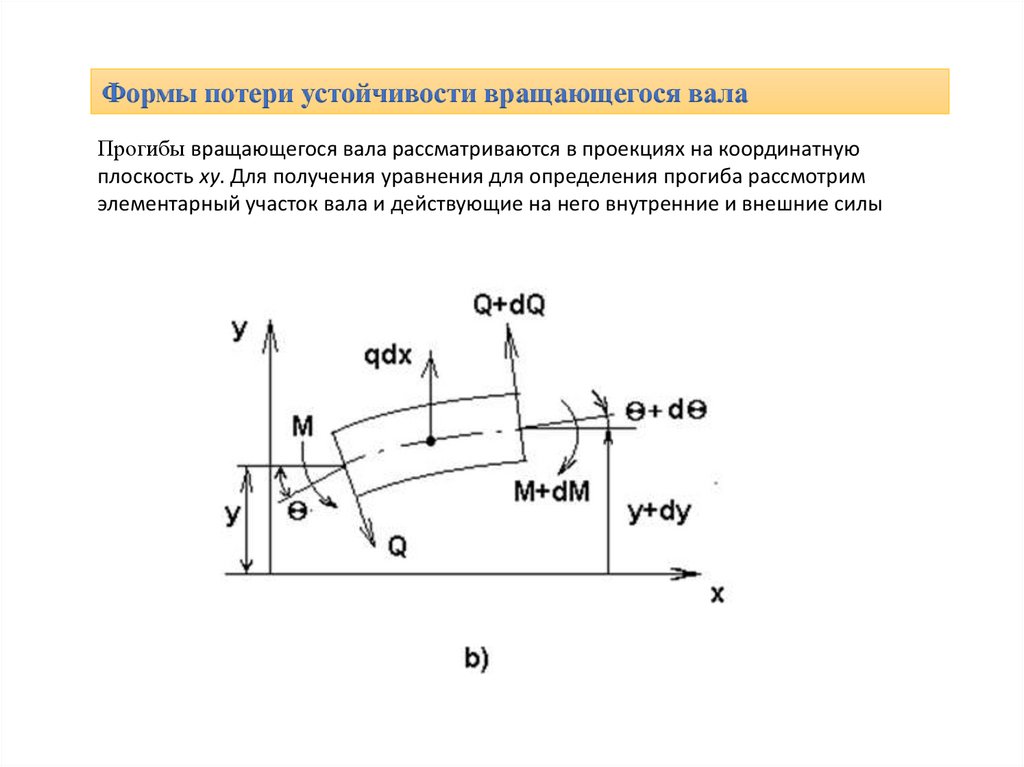
Формы потери устойчивости вращающегося валаПрогибы вращающегося вала рассматриваются в проекциях на координатную
плоскость xy. Для получения уравнения для определения прогиба рассмотрим
элементарный участок вала и действующие на него внутренние и внешние силы
,
21
22.
Формы потери устойчивости вращающегося вала,
22
23.
Формы потери устойчивости вращающегося вала,
23
24.
Формы потери устойчивости вращающегося вала,
24
25.
Формы потери устойчивости вращающегося вала,
25