













 physics
physicsSimilar presentations:










Механические колебания
1.
МЕХАНИЧЕСКИЕКОЛЕБАНИЯ
2.
План лекции:Колебательное
движение.
Гармоническое
колебание
2. Скорость и ускорение гармонического колебания
3.
Энергия
гармонического
колебательного
движения
4.
Свободные
колебания.
Гармонический
осциллятор
5. Пружинный, математический и физический
маятники
6.
Вынужденные
колебания.
Резонанс.
Автоколебания
7. Примеры проявления резонансных явлений в
живых организмах
8.
Сложение
гармонических
колебаний,
происходящих вдоль одной прямой. Сложение
взаимно перпендикулярных колебаний
1.
3.
КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ.ГАРМОНИЧЕСКОЕ КОЛЕБАНИЕ
4.
Нарядус
поступательными
и
вращательными движениями тел в механике
значительный интерес представляют и
колебательные движения.
Колебания широко распространены в
природе и технике. Колебательные процессы
лежат в основе таких отраслей техники как
электротехника, радиотехника и т.д.
5.
Колебаниями - называются процессы,отличающиеся той или иной степенью
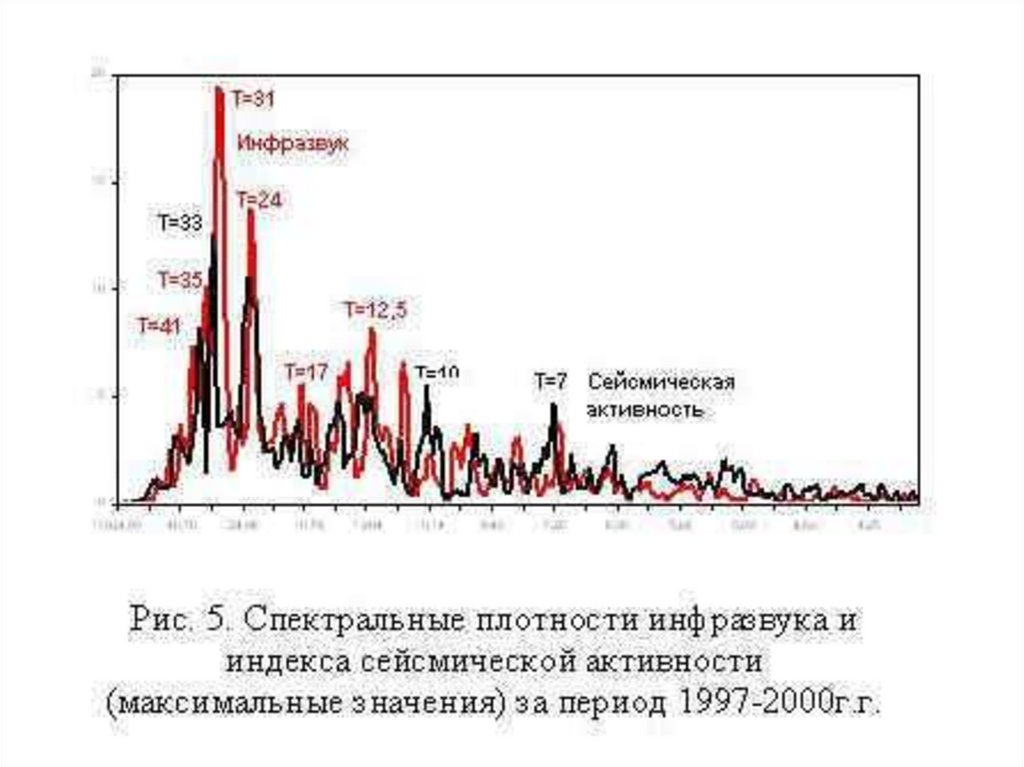
повторяемости (качели, ветка дерева,
фазы луны, морские приливы и отливы,
пульсовая волна, сердце, гортань…).
6.
В зависимости от физической природыколебания бывают
механические
электромагнитные
Механическими колебаниями называют
движения тел, повторяющиеся точно
(или приблизительно) через одинаковые
промежутки
времени
(смещения
скорости, ускорения, энергии и т.п.).
7. Примерами простых колебательных систем могут служить груз на пружине или математический маятник
8.
В зависимости от характера воздействия наколеблющуюся систему, различают:
1.Свободные
колебания, возникающие при
однократном воздействии внешней силы и при
последующем отсутствии внешних воздействий
на колебательную систему(колебания груза на
пружине или колебания маятника являются
свободными колебаниями).
2. Вынужденные – возникающие под действием
внешних, периодически изменяющихся сил
(колебание моста при прохождении солдат,
идущих в ногу).
9.
3.Автоколебания – возникающие под
действием внутренних периодических сил
(маятник часов получает толчки в момент
прохождения её через среднее положение).
4. Параметрические колебания - происходит
периодическое изменение, какого- либо
параметра системы за счет внешнего
воздействия (например, длины нити
математического маятника).
Колебательная система - это система тел,
совершающая колебания.
10.
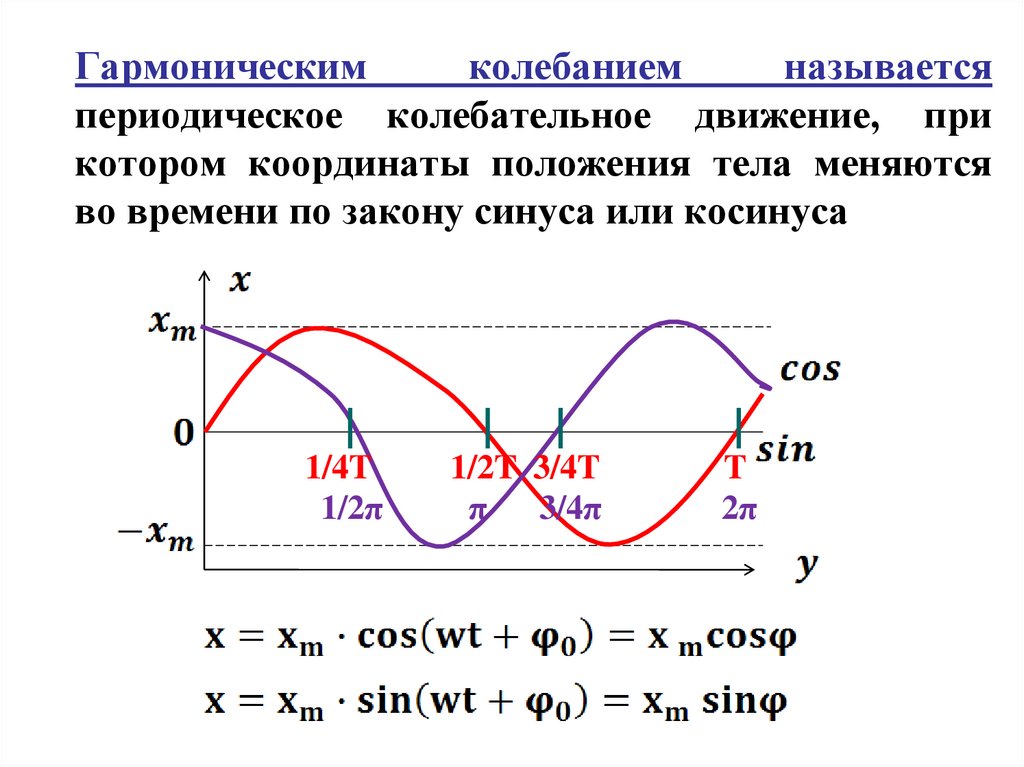
Гармоническимколебанием
называется
периодическое колебательное движение, при
котором координаты положения тела меняются
во времени по закону синуса или косинуса
1/4T
1/2π
1/2T 3/4T
π 3/4π
T
2π
11.
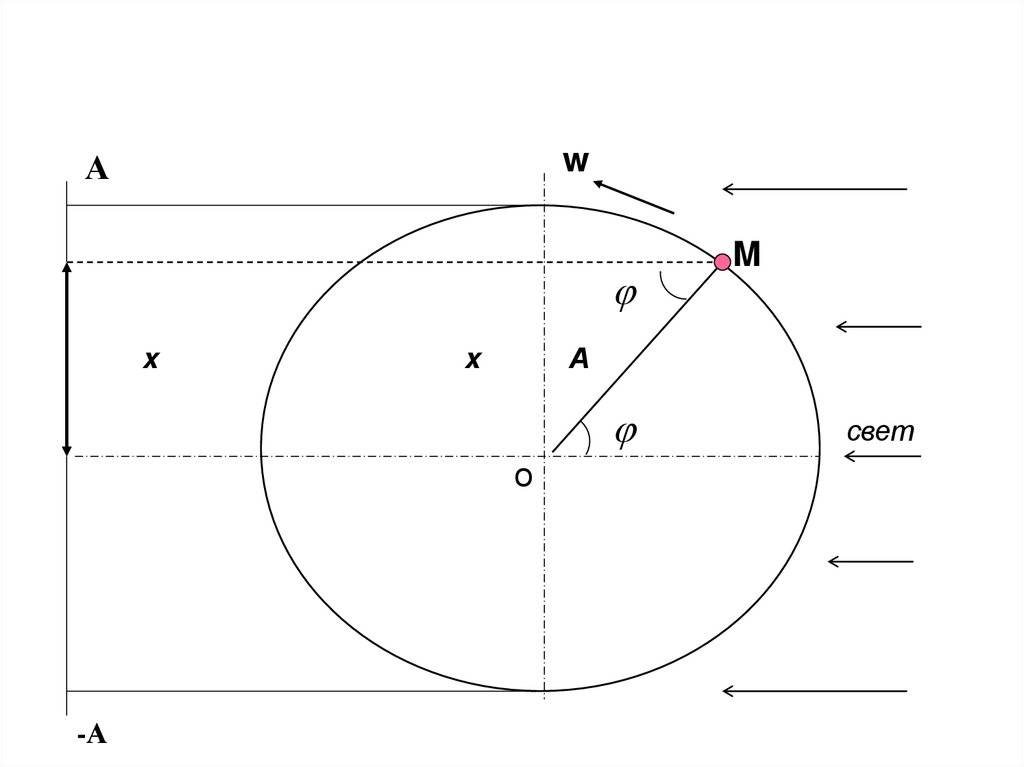
Выведем уравнение гармоническогоколебания при
помощи установки,
состоящей из экрана и вращающегося диска
с закреплённым на нём непрозрачным
шариком
12.
wА
x
А
x
о
-А
M
свет
13.
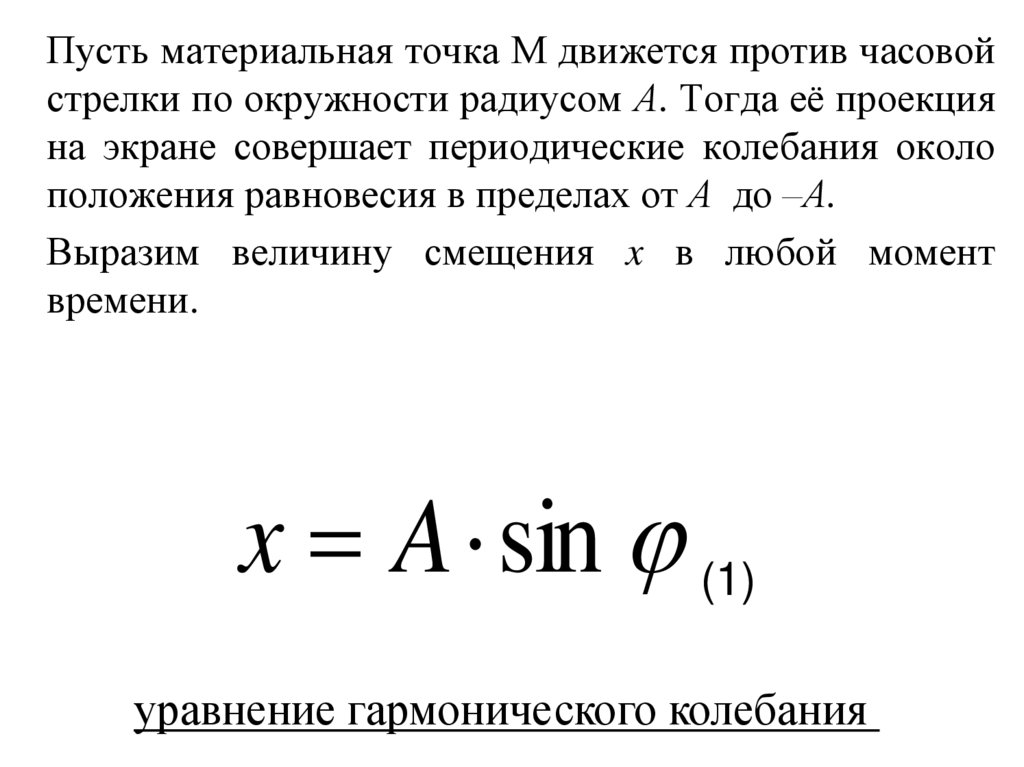
Пусть материальная точка М движется против часовойстрелки по окружности радиусом А. Тогда её проекция
на экране совершает периодические колебания около
положения равновесия в пределах от А до –А.
Выразим величину смещения x в любой момент
времени.
x A sin (1)
уравнение гармонического колебания
14.
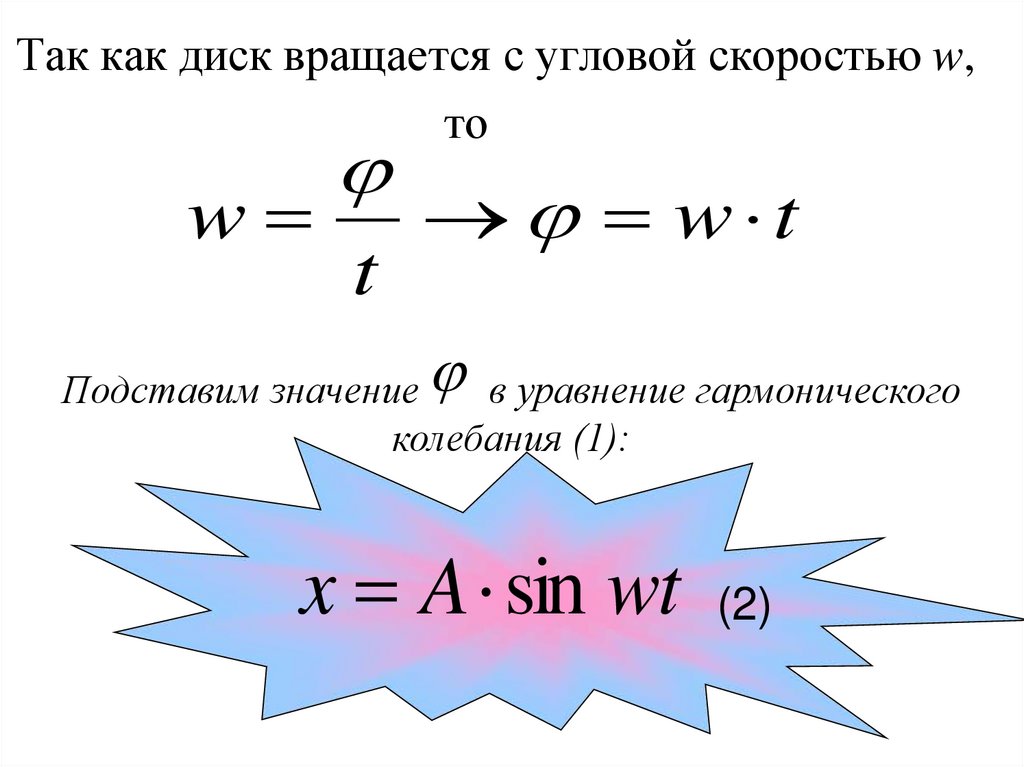
Так как диск вращается с угловой скоростью w,то
w
t
w t
Подставим значение в уравнение гармонического
колебания (1):
x A sin wt
(2)
15.
Если диск совершает полный оборот2
w
;
T
1
T ;
v
1
v ;
T
w 2 v
16.
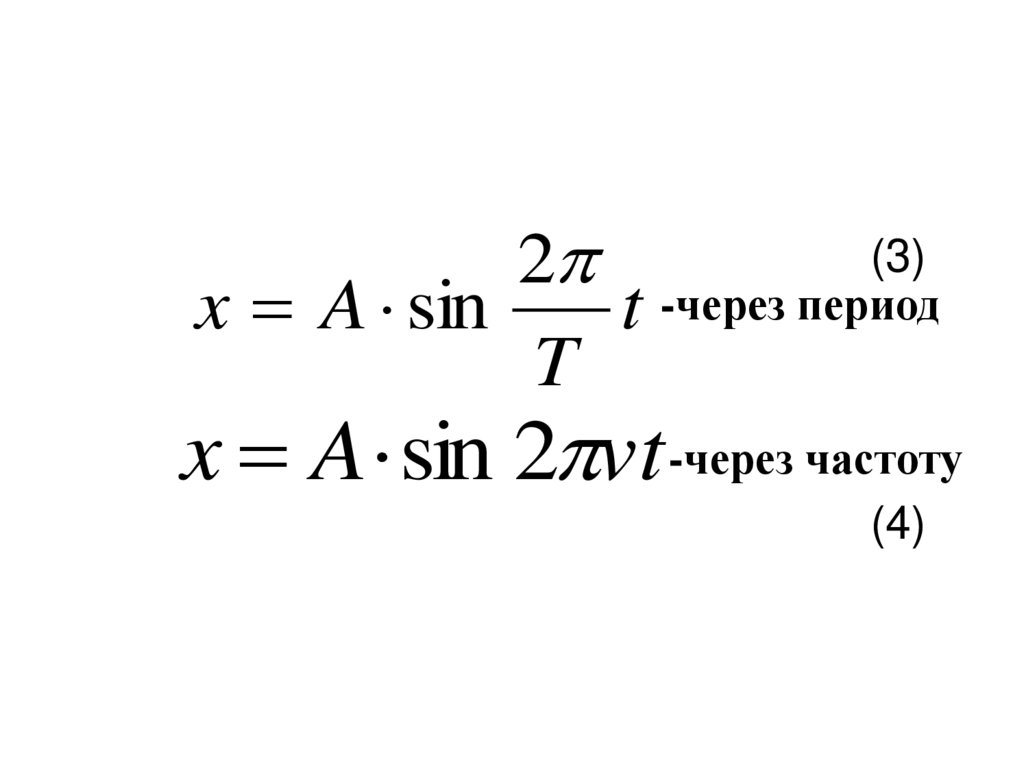
(3)2
x A sin
t -через период
T
x A sin 2 vt -через частоту
(4)
17.
Основные характеристикигармонического колебания:
1. x- смещение - отклонение от положения
равновесия в данный момент времени (может
быть >0 и <0), [м]
2. A – амплитуда - максимальное отклонение от
положения равновесия,[м]
3. T- период – время совершения одного полного
колебания,[с]
18.
4. w – циклическая частота - числополных колебаний за 2π сек,[рад/с]
5. wt- фаза колебания - характеризует
состояние колебательной системы в
любой заданный момент времени.
6.
v- частота- число колебаний в
единицу времени.
19.
Если к началу наблюдения фаза имела некоторое начальноезначение 0 , то уравнение запишется:
x A sin( 0 wt)(5)
гармоническое колебание с начальной фазой
7. φ- угловая физическая величина, показывающая
положение и направление движения колебательной
системы в данный момент времени,[рад]
8. φ0- начальная фаза,[рад]
20.
СКОРОСТЬ И УСКОРЕНИЕГАРМОНИЧЕСКОГО КОЛЕБАНИЯ
21.
Скорость - гармонических колебаний есть перваяпроизводная смещения по времени.
dS
V
Известно, что скорость
dt
для гармонического
колебания определяется следующим образом
dx d ( A sin wt )
v
A w cos wt
dt
dt
V A w cos wt (6)
скорость гармонического колебания
22.
dV d ( A w cos wt )2
a
A w sin wt
dt
dt
a A w sin wt
2
(7)
ускорение при гармоническом колебании
23.
Колебательноедвижение
выполняется
под
действием силы, которая может быть определена по
второму закону Ньютона:
, но
F m a
ускорение
при
гармонических
колебаниях
определяется
по
формуле
a A w 2 sin wt , подставим значение ускорения
во
второй
закон
Ньютона,
то
F m A w 2 sin wt , но A sin wt x , то
F m x w
2
(8)
сила действующая на колеблющееся тело
24.
Она пропорциональна смещению, знак «-» указываетна, то что сила направлена в противоположную
сторону относительно смещения k m 2
F k x
(9)
квазиупругая сила, вызывающая колебательные
движения
25.
Энергия гармоническогоколебательного движения
26.
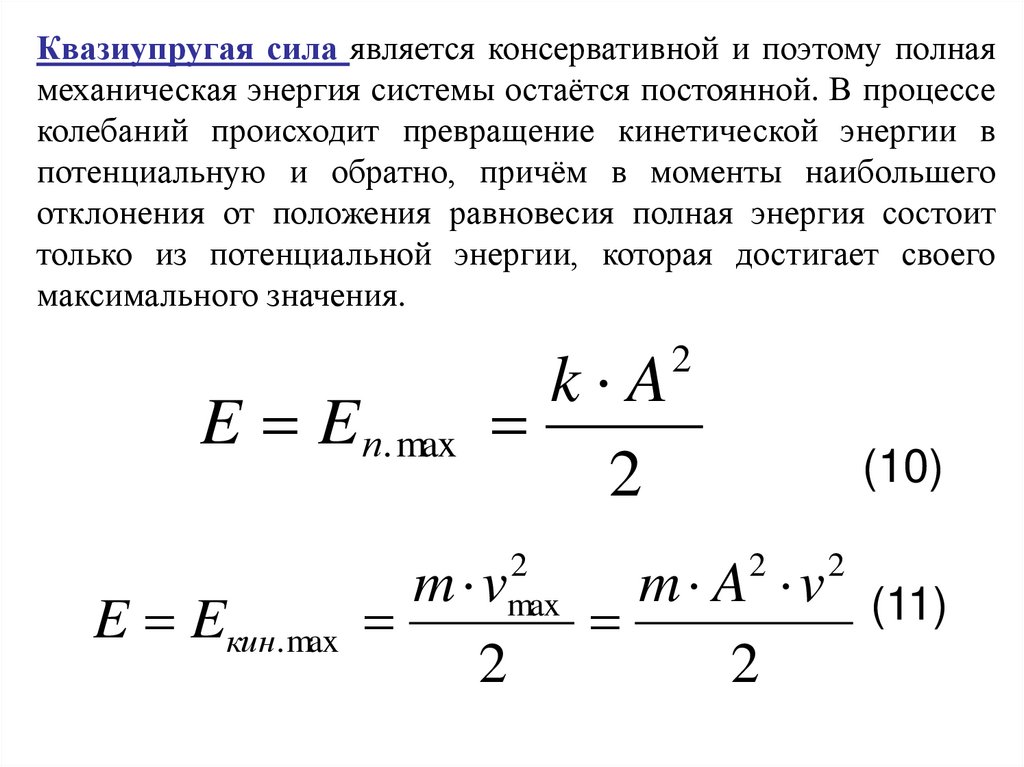
Квазиупругая сила является консервативной и поэтому полнаямеханическая энергия системы остаётся постоянной. В процессе
колебаний происходит превращение кинетической энергии в
потенциальную и обратно, причём в моменты наибольшего
отклонения от положения равновесия полная энергия состоит
только из потенциальной энергии, которая достигает своего
максимального значения.
E E п. max
E Eкин.max
k A
2
m v
2
2
max
2
(10)
m A v (11)
2
2
2
27.
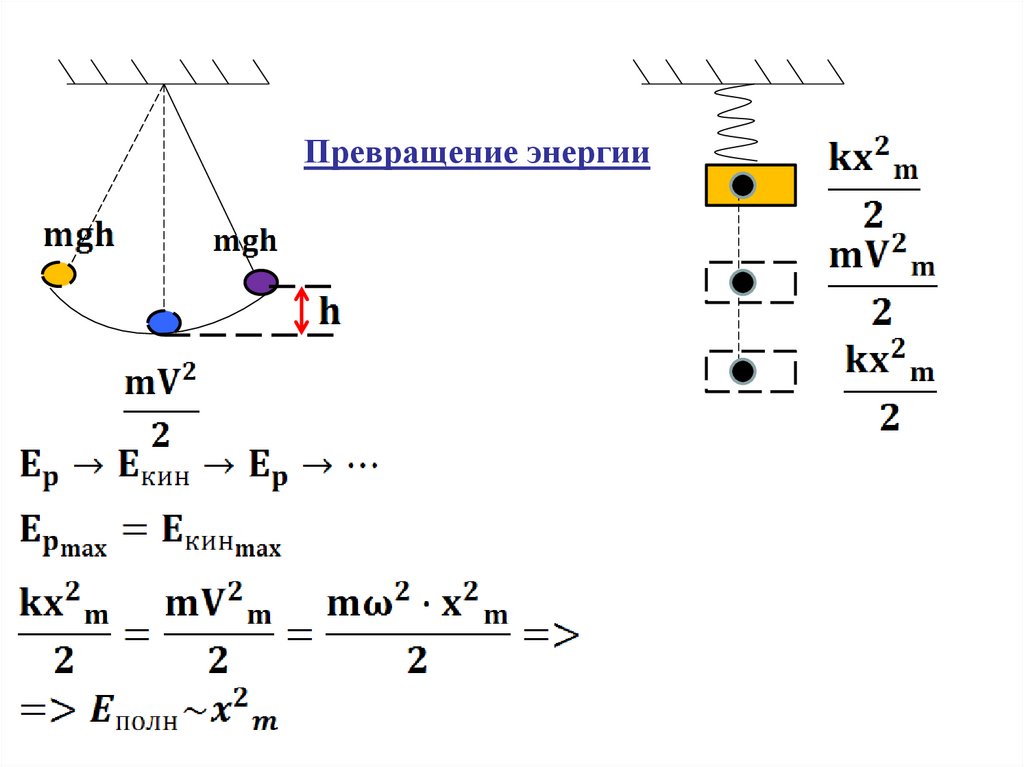
Превращение энергии28.
Свободные колебания.Гармонический осциллятор.
29.
Система, движущая под действием упругой средыназывается одномерным гармоническим
осциллятором.
Ускорение при гармоническом
следующим образом:
d 2x
a
,
dt
или
колебании
определяется
x A w sin wt;
//
x // A w 2 sin wt
2
,
но
A sin wt x
x x w ;
//
2
то,
30.
x w x 02
(12)
уравнение движение гармонического осциллятора
31.
Пружинный, математический ифизический маятники.
32.
Пружинный маятник- это груз массой mподвешенный на упругой пружине и
совершающий гармонические колебания.
Колебания маятника совершаются под действием упругой
силы
F k x
(13)
m
k- коэффициент упругости, а в случае с пружиной он
называется коэффициентом жёсткости.
33. Пружинный маятник
mg kx 0ma mg k x x 0
ma kx
kx0
k(x0+x)
x
mg
mg
k
m
2
0
x x 0
2
0
34.
Уравнение движения маятника записывается:m a k x
Ускорение- это вторая производная смещения по
времени:
m x k x
т.к
a x
Разделим обе части уравнения на m, то получим
k
x x 0
m
(14)
35.
Сравним между собой уравнения (12) и (14), очевидно, ,k
что w
m
2
2
k
;
, w
а w
m
T
2
T
w
период колебания
подставим в формулу периода колебания значение w,
2
то
T
k
m
,
m
T 2
k
m
T 2
k
(15)
период колебания пружинного маятника.
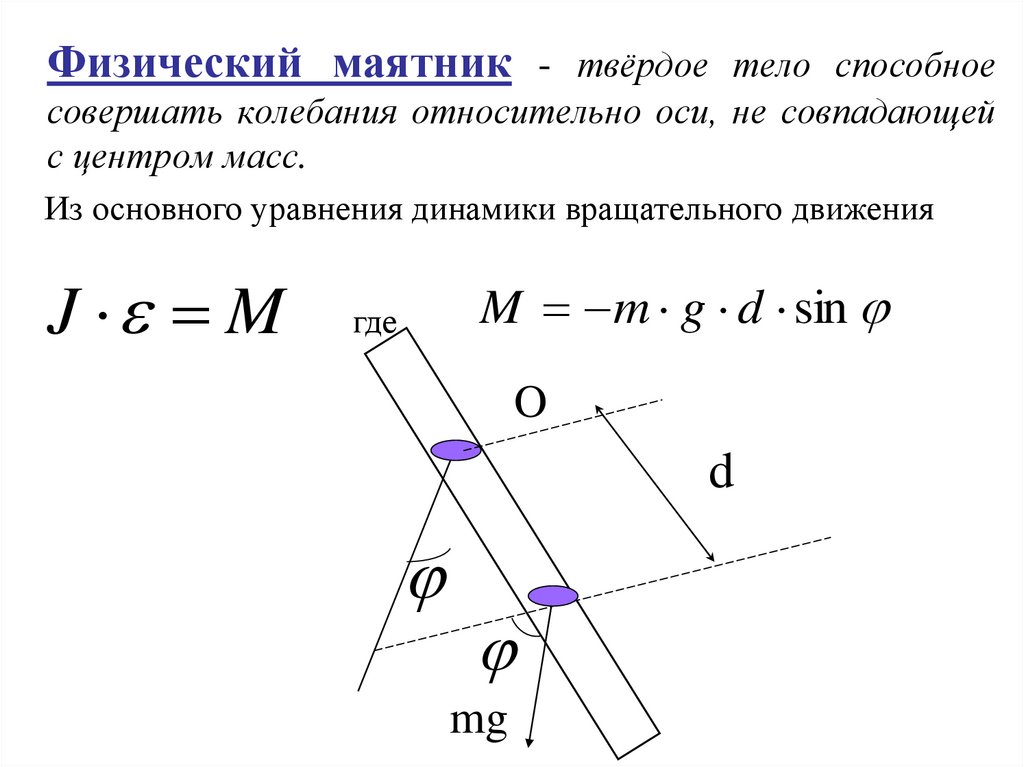
36.
Физический маятник - твёрдое тело способноесовершать колебания относительно оси, не совпадающей
с центром масс.
Из основного уравнения динамики вращательного движения
J M
M m g d sin
где
O
d
mg
37.
Для малых колебаний можно получитьJ M 0; J m g d 0
Разделим уравнение (16) на J
Введём обозначение
m g d
w
I
2
(16)
, получим уравнение
38.
w 02
,которое аналогично полученному ранее
2
T
w
2
,
m g d
I
I
T 2
m g d
(17)
Период колебания физического маятника
39.
Математический маятник- материальная точка
подвешенная на невесомой нерастяжимой нити.
Реальный маятник, у которого масса тела во много раз больше
массы нити, а размеры тела во много раз меньше длинны нити,
можно считать математическим.
40. Математический маятник
ma T mgma mg sin
x
sin
g
x x 0
2
0
x x 0
2
0
g
41.
Учитывая, что момент силы тяжестиM m g l sin
и момент инерции точки
из динамического
получим:
уравнения
J m l
2
вращательного
J M
движения
42.
m l m g l 02
Разделим уравнение на ml2, получим
m g l
0
2
m l
2
w 0,
0
g
0,
l
g
w
l
2
0
43.
Период колебания математического маятника2
T
2
w0
l
g (18)
Мы приходим к выводу, что во всех случаях колебания
описываются одним и тем же уравнением совпадающим с
уравнением движения гармонического осциллятора.
x w x 0,
2
0
44.
Вынужденные колебания.Резонанс. Автоколебания.
45.
Вынужденнымиколебаниями
называются
незатухающие колебания системы, которые вызываются
действием на неё внешних сил , периодически изменяющихся с
течением времени.
Сила, вызывающая вынужденные колебания,
возмущающей (вынуждающей) силой.
называется
Вынуждающая сила изменяется по закону:
F (t ) F0 cos w t
(19)
F0- амплитуда вынуждающей силы, w- циклическая частота. Под
действием этой силы в системе устанавливаются гармонические
колебания с циклической частотой w.
46.
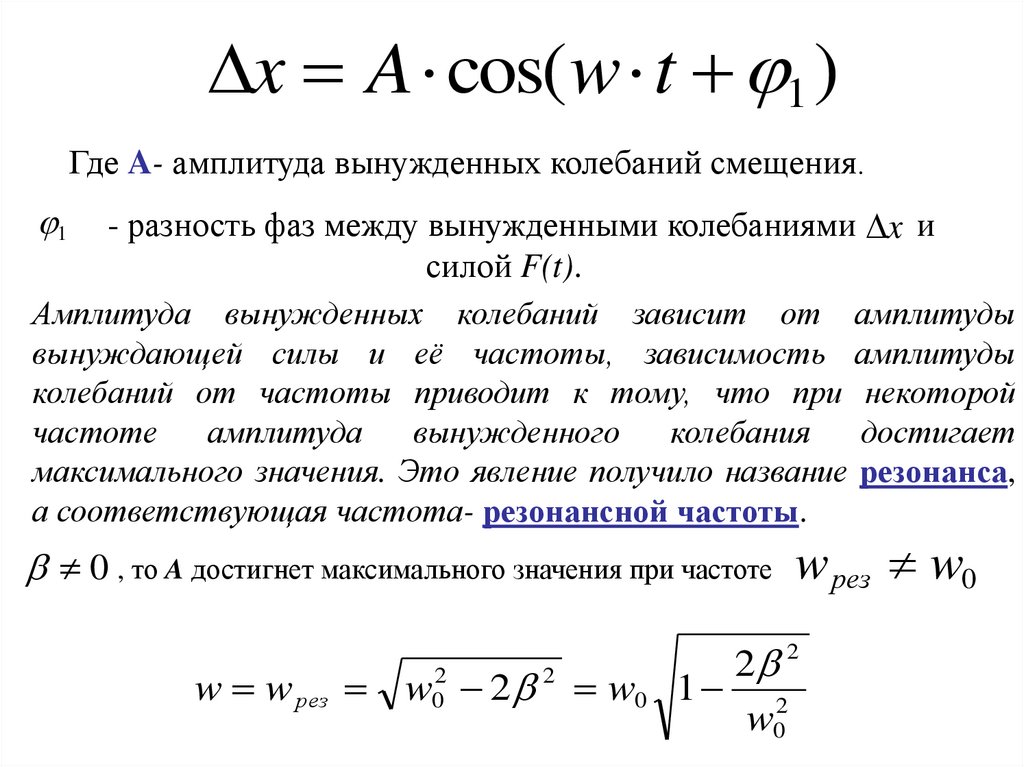
x A cos(w t 1 )Где A- амплитуда вынужденных колебаний смещения.
1
- разность фаз между вынужденными колебаниями x и
силой F(t).
Амплитуда вынужденных колебаний зависит от амплитуды
вынуждающей силы и её частоты, зависимость амплитуды
колебаний от частоты приводит к тому, что при некоторой
частоте
амплитуда
вынужденного
колебания
достигает
максимального значения. Это явление получило название резонанса,
а соответствующая частота- резонансной частоты.
0 , то A достигнет максимального значения при частоте
w w рез
w02 2 2 w0
w рез w0
2 2
1 2
w0
47. РЕЗОНАНС
Явление резкого возрастания амплитуды вынужденногоколебания называется резонансом.
Резонанс наблюдается в том случае, когда частота
вынуждающей
силы
равна
частоте
собственных
колебаний.
48.
Явление возрастания амплитуды вынужденных колебаний приприближении циклической частоты вынуждающей силы к
значению wрез – называется резонансом ,
wрез – резонансная циклическая частота.
Явление резонанса используется в акустике- для анализа звуков,
их усиления и.т.д.
Под действием периодически изменяющихся нагрузок в
машинах и различных сооружениях могут возникнуть явления
резонанса, которые могут быть опасны для эксплуатации машин.
49.
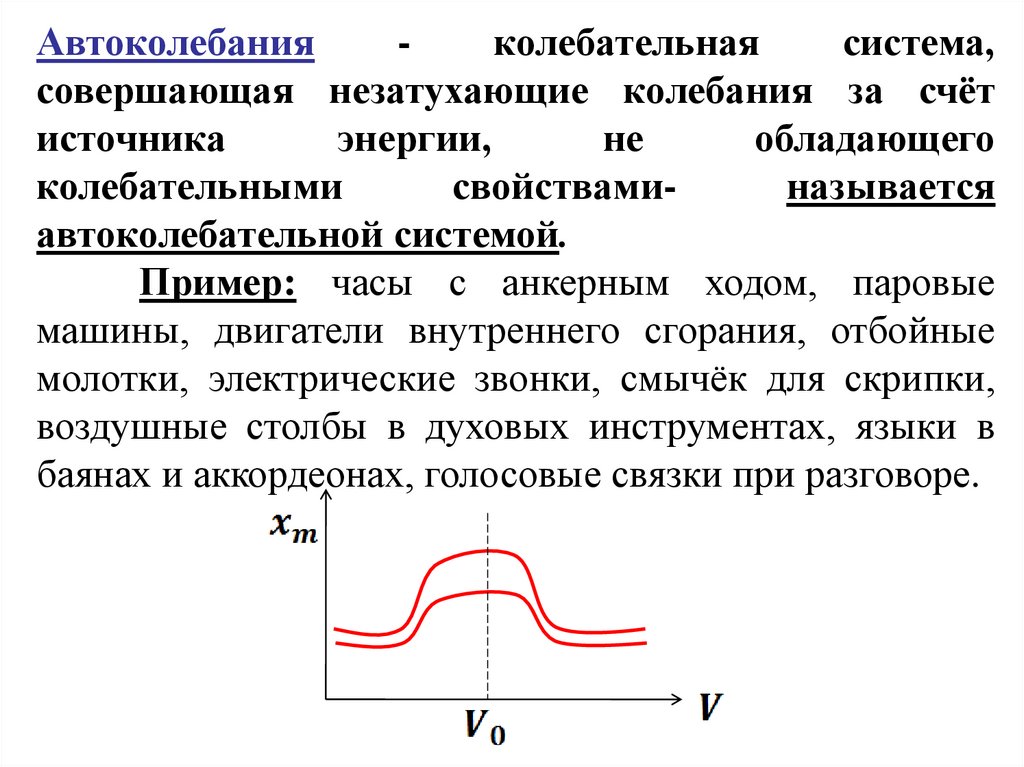
Автоколебанияколебательная
система,
совершающая незатухающие колебания за счёт
источника
энергии,
не
обладающего
колебательными
свойстваминазывается
автоколебательной системой.
Пример: часы с анкерным ходом, паровые
машины, двигатели внутреннего сгорания, отбойные
молотки, электрические звонки, смычёк для скрипки,
воздушные столбы в духовых инструментах, языки в
баянах и аккордеонах, голосовые связки при разговоре.
50. Логарифмический декремент затухания
x1e
xn
t
x1
x me
e
t
x n x me
1
1
t
xt
xm e
T
ln
ln
ln e T
t T
x t T
xm e
1
T
Q
N
e
T
51.
Примеры проявлениярезонансных явлений в живых
организмах.
52.
В лаборатории электроакустики в Марселеиспытывали генератор, создававший акустические
волны с частотой
7 Гц (инфразвук), люди
испытывали сильные внутренние боли, нарушение
координации движений и зрения. Оказалось, что
инфразвук действует на вестибулярный аппарат,
собственная частота которого 2…20 Гц; он
переходит в резонансные колебания, нарушающие
деятельность вестибулярного аппарата.
Инфразвук также вызывает вынужденные колебания
различных органов, каждый из которых обладает
собственной частотой.
53.
Некоторые из них, такие как печень, почки, сами посебе не совершают колебательных движений, но под
действием внешней периодической силы могут войти с
ней в резонанс.
Особенно вредны резонансные явления для сердца. Это
приводит к расширению кровеносных сосудов и
кровоизлияниям.
Если
резонансные
колебания
находятся в противофазе, то возможны торможение
кровообращения, остановка сердца.
54.
55.
56.
57.
Сложение гармоническихколебаний, происходящих вдоль
одной прямой. Сложение взаимно
перпендикулярных колебаний
58.
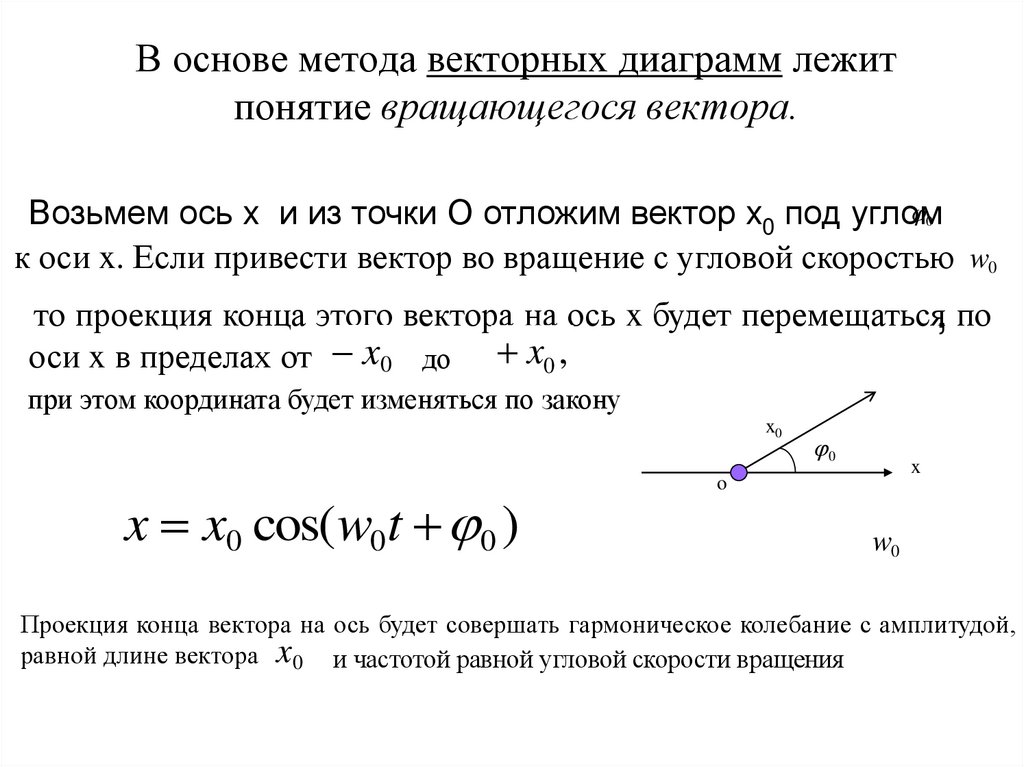
В основе метода векторных диаграмм лежитпонятие вращающегося вектора.
Возьмем ось x и из точки О отложим вектор x0 под углом
к оси x. Если привести вектор во вращение с угловой скоростью w0
0
то проекция конца этого вектора на ось x будет перемещаться, по
оси x в пределах от x0 до x0 ,
при этом координата будет изменяться по закону
x0
x x0 cos(w0t 0 )
0
x
o
w0
Проекция конца вектора на ось будет совершать гармоническое колебание с амплитудой,
равной длине вектора x 0 и частотой равной угловой скорости вращения
59.
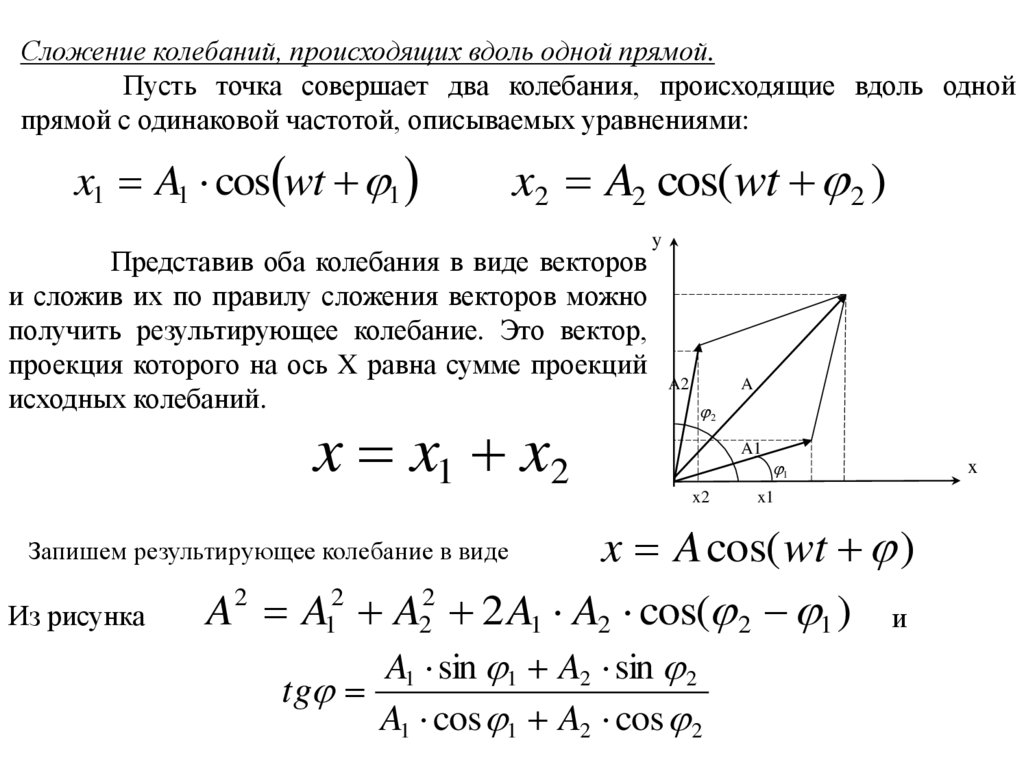
Сложение колебаний, происходящих вдоль одной прямой.Пусть точка совершает два колебания, происходящие вдоль одной
прямой с одинаковой частотой, описываемых уравнениями:
x1 A1 cos wt 1
x2 A2 cos(wt 2 )
Представив оба колебания в виде векторов
и сложив их по правилу сложения векторов можно
получить результирующее колебание. Это вектор,
проекция которого на ось X равна сумме проекций
исходных колебаний.
x x1 x2
y
A2
A
2
A1
x2
x1
x A cos( wt )
A 2 A12 A22 2 A1 A2 cos( 2 1 ) и
Запишем результирующее колебание в виде
Из рисунка
1
A1 sin 1 A2 sin 2
tg
A1 cos 1 A2 cos 2
x
60.
Сложение взаимно перпендикулярных колебанийДопустим, что материальная точка будет совершать
колебания в двух взаимно перпендикулярных направлениях. Если
возбудить оба эти колебания, то точка будет двигаться по
некоторой траектории, вид которой зависит от разности фаз
складываемых колебаний. Пусть колебания заданы уравнениями:
x a cos wt
,
y b cos( wt ) (2)
которые являются координатами движущейся точки,
заданными в параметрической форме. Исключив из этих
уравнений параметр t, получим уравнение траектории
точки. Сделаем некоторые математические
преобразования:
61.
xcos wt
a
,
sin wt 1 (cos wt )
2
,
x2
sin wt 1 2
a
,
y
cos( wt )
b
Развернём cos в уравнение (2) по формуле для косинуса суммы:
y
cos( wt ) cos wt cos sin wt sin
b
подставим вместо cos wt и sin wt
их значения, получим
y x
x2
cos sin 1 2
b a
a
после преобразования получим :
x 2 y 2 2 xy
2
2
cos sin
2
ab
a
b
Это уравнение эллипса.
Это уравнение представляет собой общее уравнение траектории
материальной точки, совершающей два взаимно перпендикулярных колебания.