










 physics
physicsSimilar presentations:

")


")





Динамика. Законы Ньютона
1.
МЕХАНИКАДИНАМИКА
Кинематика дает описание движения тел, не
затрагивая вопроса о том, почему тело движется
именно так, а не иначе.
Динамика изучает движение тел в связи с теми
причинами, которые обуславливают тот или иной
характер движения.
В основе классической механики лежат три
закона динамики, сформулированные Ньютоном в
1687 году. Задача законов Ньютона – выяснить
причины движения.
2.
Законы НьютонаПервый закон Ньютона называют законом
инерции.
Под инерцией понимают явление, при котором
тело
сохраняет
состояние
равномерного
прямолинейного
движения
или
покоя,
если
отсутствуют действия на него других тел.
Первый закон Ньютона формулируется так:
всякое тело сохраняет состояние относительного покоя или равномерного прямолинейного
движения до тех пор, пока внешние воздействия не
изменят этого состояния.
3. В динамике вводятся 2 новые физические величины:
• масса – является количественной характеристикойинертных свойств тела. Она показывает, как тело
реагирует на внешнее воздействие;
• сила – это векторная физическая величина,
являющаяся мерой механического воздействия на тело
со стороны других тел или полей, в результате которого
тело приобретает ускорение или изменяет свою форму
и размеры.
Сила, как и любая векторная величина, считается
заданной, если известны её численное значение,
направление и точка приложения силы.
4.
Второй закон Ньютона, устанавливающийсвязь между динамическими и кинематическими
величинами, формулируется так:
ускорение a, приобретаемое телом под
действием силы F, пропорционально этой силе,
и обратно пропорционально массе m этого
тела, а направление его совпадает с вектором
силы, т.е.
F
a
m
5.
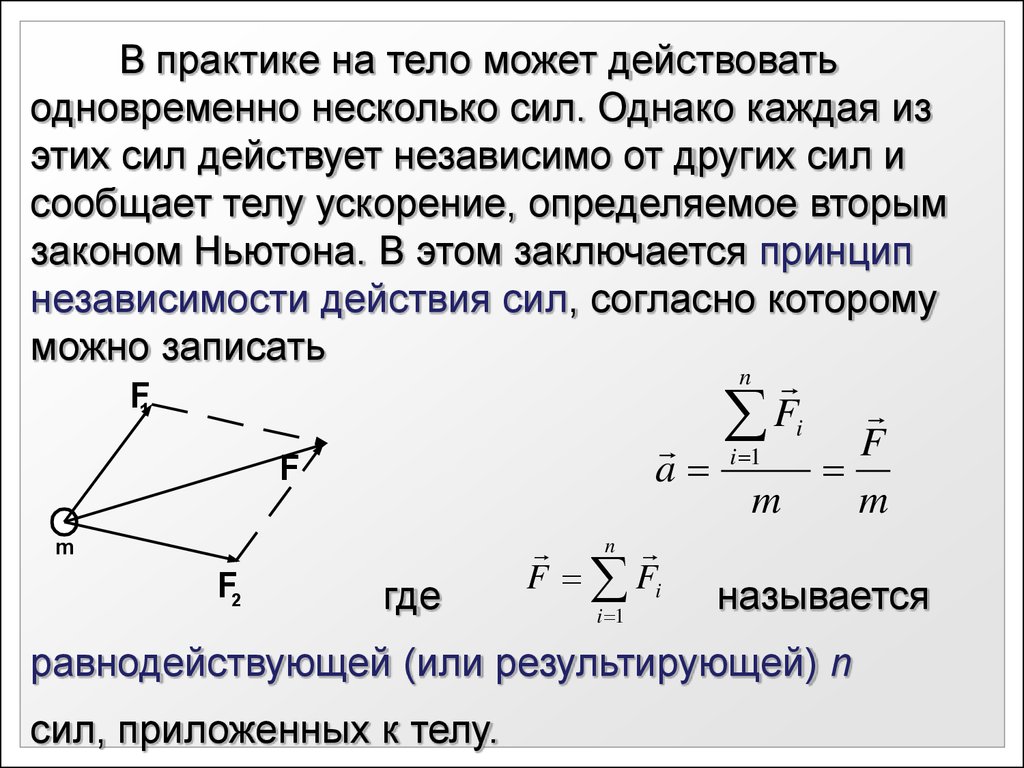
В практике на тело может действоватьодновременно несколько сил. Однако каждая из
этих сил действует независимо от других сил и
сообщает телу ускорение, определяемое вторым
законом Ньютона. В этом заключается принцип
независимости действия сил, согласно которому
можно записать
n
F1
Fi
i 1
F
F
a
m
m
m
F2
где
n
F Fi
i 1
называется
равнодействующей (или результирующей) n
сил, приложенных к телу.
6.
В скалярной форме второй закон можнозаписать так:
F ma
т.е. сила численно равна произведению массы
тела на ускорение, вызываемое этой силой.
Второй закон Ньютона можно записать и в
другой форме.
d
v
Так как
, можно записать
a
dt
dv
F m
dt
7.
Если масса является постоянной величиной,то ее можно внести под знак дифференциала,
d
получим
F
mv
dt
Вектор p ( mv ) называется импульсом или
количеством движения тела и совпадает по
направлению с вектором скорости v, а d ( mv )
выражает изменение вектора импульса.
Это уравнение преобразуем к следующему
виду:
F dt d (mv )
Fdt называют импульсом силы,
Произведение
действующей в течение малого промежутка
времени , и имеет с силой одно направление.
8.
Из предыдущего уравнения, также являющимсявыражением основного закона динамики
(второго закона Ньютона) следует:
изменение
импульса
тела
(количества
движения) равно импульсу действующей на
него силы.
При действии на тело массы m постоянной
силы F тело приобретает постоянное
ускорение , т.е. тело движется
равнопеременно:
d (mv )
const
dt
9.
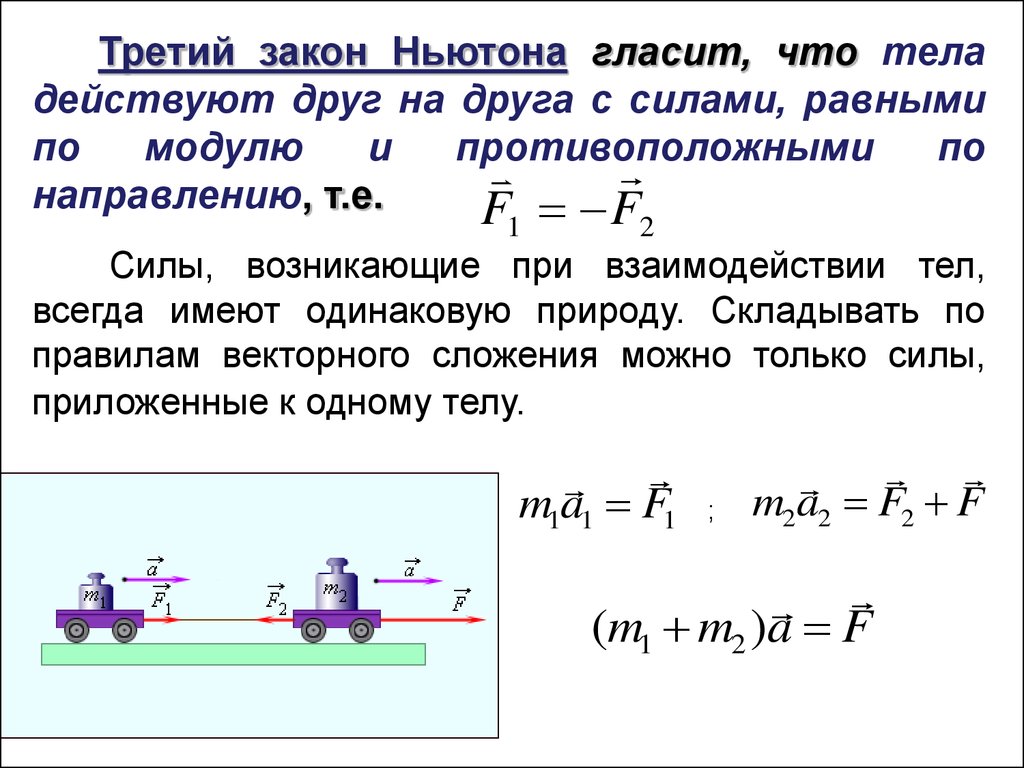
Третий закон Ньютона гласит, что теладействуют друг на друга с силами, равными
по
модулю
и
противоположными
по
направлению, т.е.
F F
1
2
Силы, возникающие при взаимодействии тел,
всегда имеют одинаковую природу. Складывать по
правилам векторного сложения можно только силы,
приложенные к одному телу.
m1a1 F1
;
m2a2 F2 F
(m1 m2 )a F
10.
Закон сохранения импульсаПри взаимодействии тел импульс одного тела
может частично или полностью передаваться
другому телу.
Если на систему тел не действуют внешние
силы со стороны других тел, то такая система
называется замкнутой.
Внешние силы - это силы, действующие на
тела системы со стороны тел, не входящих в неё.
Внутренние силы - это силы, возникающие в
результате взаимодействия тел, входящих в
систему.
11.
Закон сохранения импульсаВ замкнутой системе векторная сумма
импульсов всех тел, входящих в систему,
остается
постоянной
при
любых
взаимодействиях тел этой системы между
собой.
12.
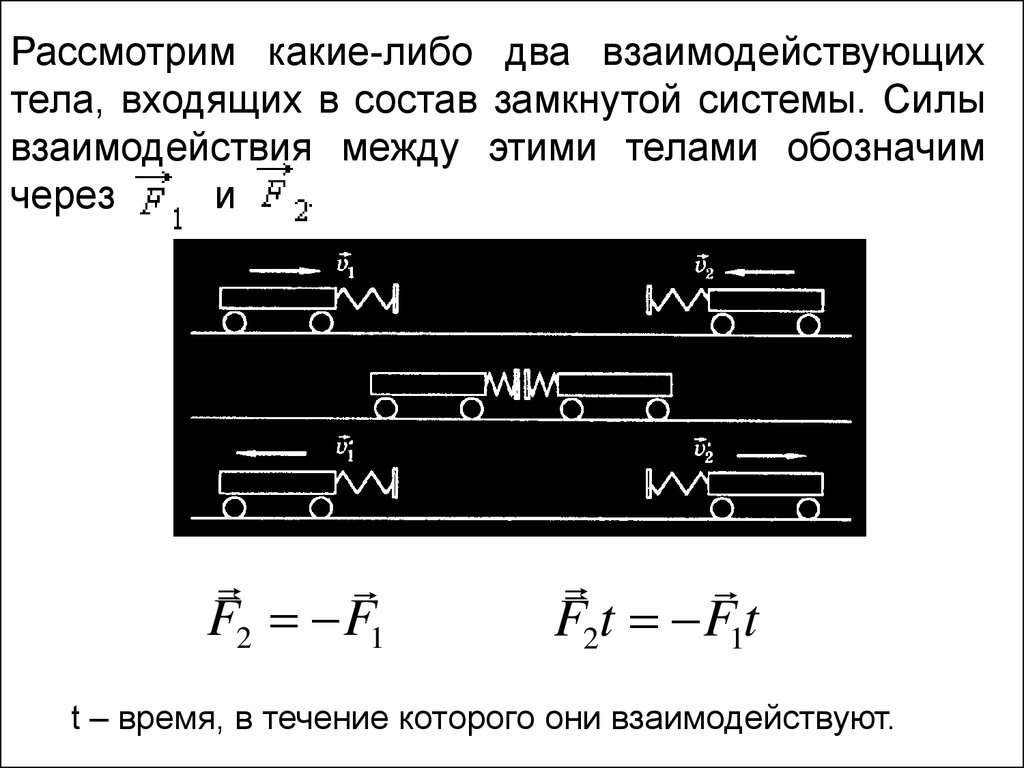
Рассмотрим какие-либо два взаимодействующихтела, входящих в состав замкнутой системы. Силы
взаимодействия между этими телами обозначим
через
и
F2 F1
F2t F1t
t – время, в течение которого они взаимодействуют.
13.
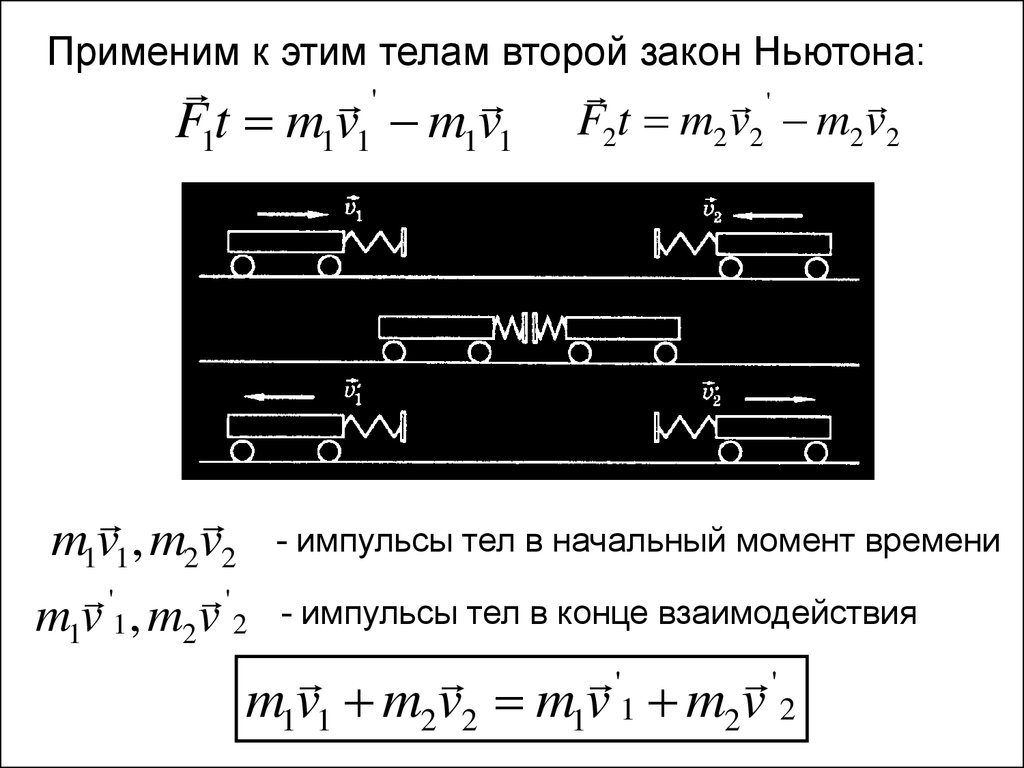
Применим к этим телам второй закон Ньютона:'
F1t m1v1 m1v1
'
F1t m1v1 m1v1
'
F2t m2 v2 m2 v2
'
F2t m2 v2 m2 v2
и
m1v1, m2v2
'
'
m1v 1 , m2v 2
- импульсы тел в начальный момент времени
- импульсы тел в конце взаимодействия
'
'
m1v1 m2v2 m1v 1 m2v 2
14.
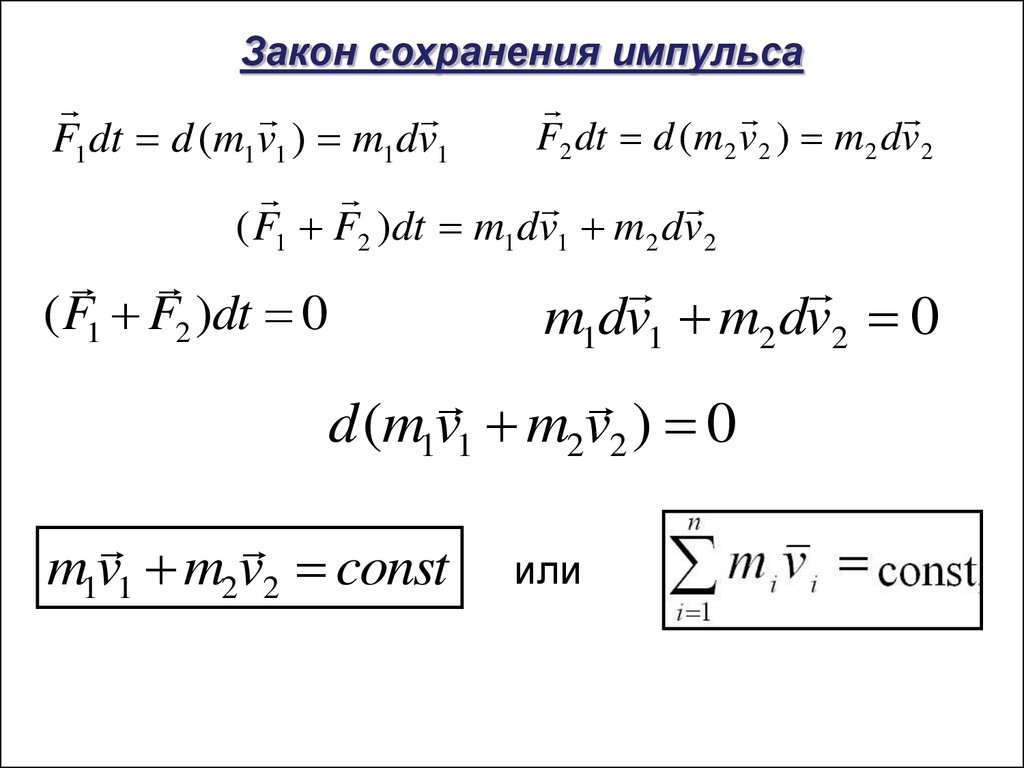
Закон сохранения импульсаF2 dt d (m2 v 2 ) m2 dv 2
F1 dt d (m1v1 ) m1 dv1
( F1 F2 )dt m1 dv1 m2 dv 2
( F1 F2 )dt 0
m1dv1 m2 dv2 0
d (m1v1 m2v2 ) 0
m1v1 m2v2 const
или
15.
Различные виды сил в динамике16.
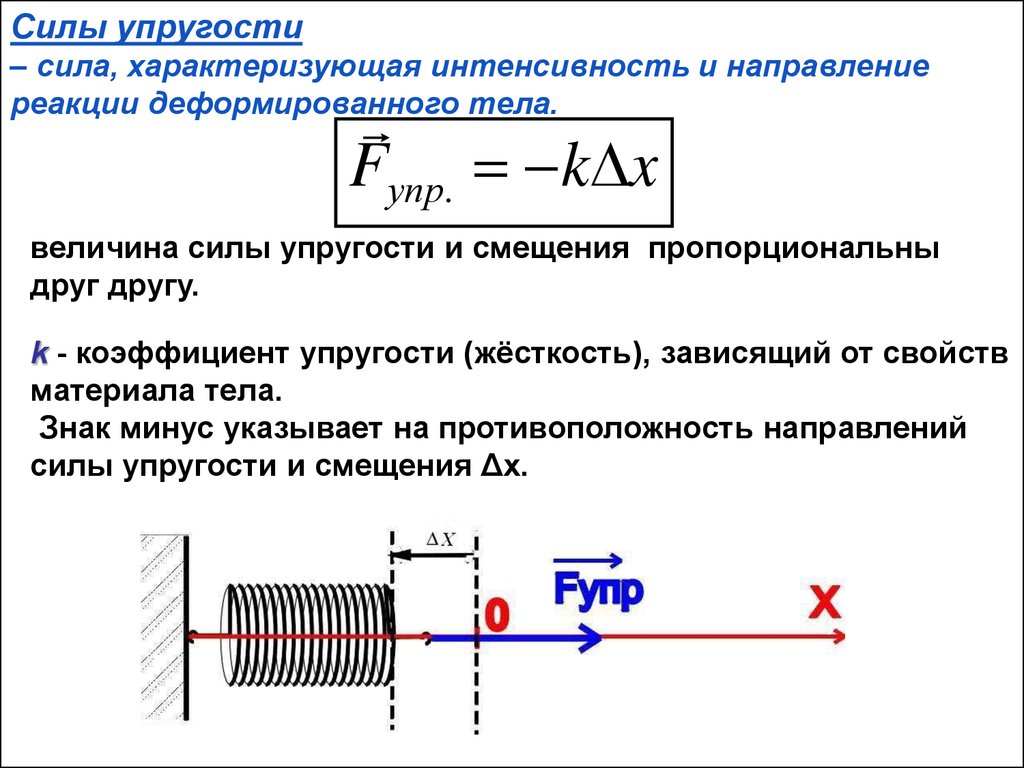
Силы упругости– сила, характеризующая интенсивность и направление
реакции деформированного тела.
Fупр. k x
величина силы упругости и смещения пропорциональны
друг другу.
k - коэффициент упругости (жёсткость), зависящий от свойств
материала тела.
Знак минус указывает на противоположность направлений
силы упругости и смещения Δx.
17.
Сила тяготения- сила, с которой все тела, вследствие обладания массой,
притягиваются друг к другу.
m1m2
F G 2
r
G = 6,67·10–11 Н·м2/кг2
Закон всемирного тяготения формулируется
следующим образом:
Любые две материальные точки взаимодействуют с
силой, пропорциональной произведению их масс и
обратно пропорционально квадрату расстояния
между ними.
18.
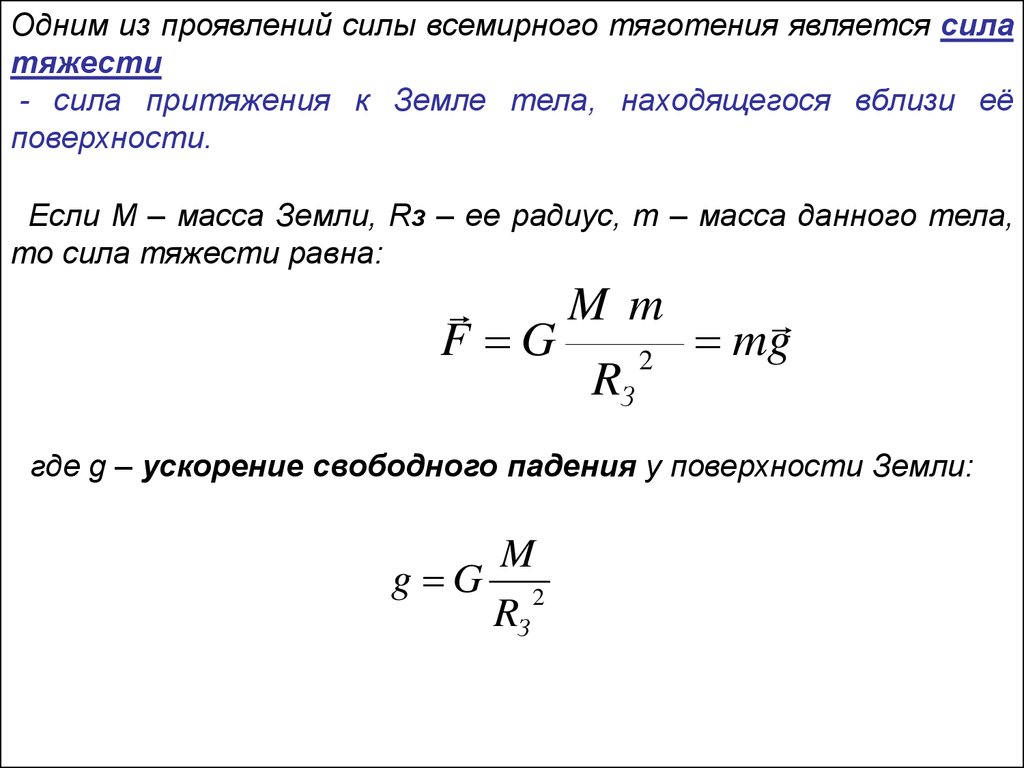
Одним из проявлений силы всемирного тяготения является силатяжести
- сила притяжения к Земле тела, находящегося вблизи её
поверхности.
Если M – масса Земли, RЗ – ее радиус, m – масса данного тела,
то сила тяжести равна:
M m
F G
mg
2
RЗ
где g – ускорение свободного падения у поверхности Земли:
M
g G 2
RЗ
19.
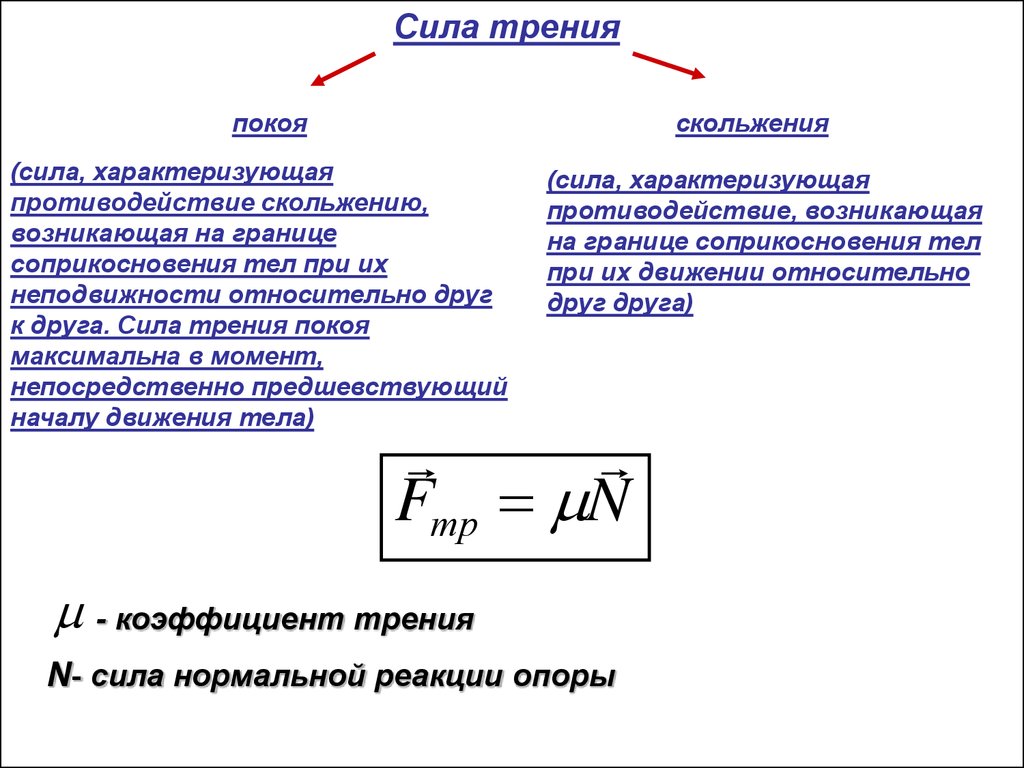
Сила тренияпокоя
скольжения
(сила, характеризующая
противодействие скольжению,
возникающая на границе
соприкосновения тел при их
неподвижности относительно друг
к друга. Сила трения покоя
максимальна в момент,
непосредственно предшевствующий
началу движения тела)
(сила, характеризующая
противодействие, возникающая
на границе соприкосновения тел
при их движении относительно
друг друга)
Fтр N
- коэффициент трения
N- сила нормальной реакции опоры
20.
Проекции силВ большинстве задач по динамике на тело действует больше чем одна сила. Для того
чтобы найти равнодействующую всех сил в этом случае можно пользоваться следующим
алгоритмом:
-Найдем проекции всех сил на ось ОХ и просуммируем их с учетом их знаков. Так получим
проекцию равнодействующей силы на ось ОХ.
- Найдем проекции всех сил на ось OY и просуммируем их с учетом их знаков. Так получим
проекцию равнодействующей силы на ось OY.
Следует обратить внимание на то, что:
Если сила перпендикулярна одной из осей, то проекция именно на эту ось будет
равна нулю.
Если при проецировании силы на одну из осей «всплывает» синус угла, то при
проецировании этой же силы на другую ось всегда будет косинус (того же угла).
Запомнить при проецировании на какую ось будет синус или косинус легко. Если
угол прилежит к проекции, то при проецировании силы на эту ось будет косинус.
Если сила направлена в ту же сторону что и ось, то ее проекция на эту ось будет
положительной, а если сила направлена в противоположную оси сторону, то ее
проекция на эту ось будет отрицательной.
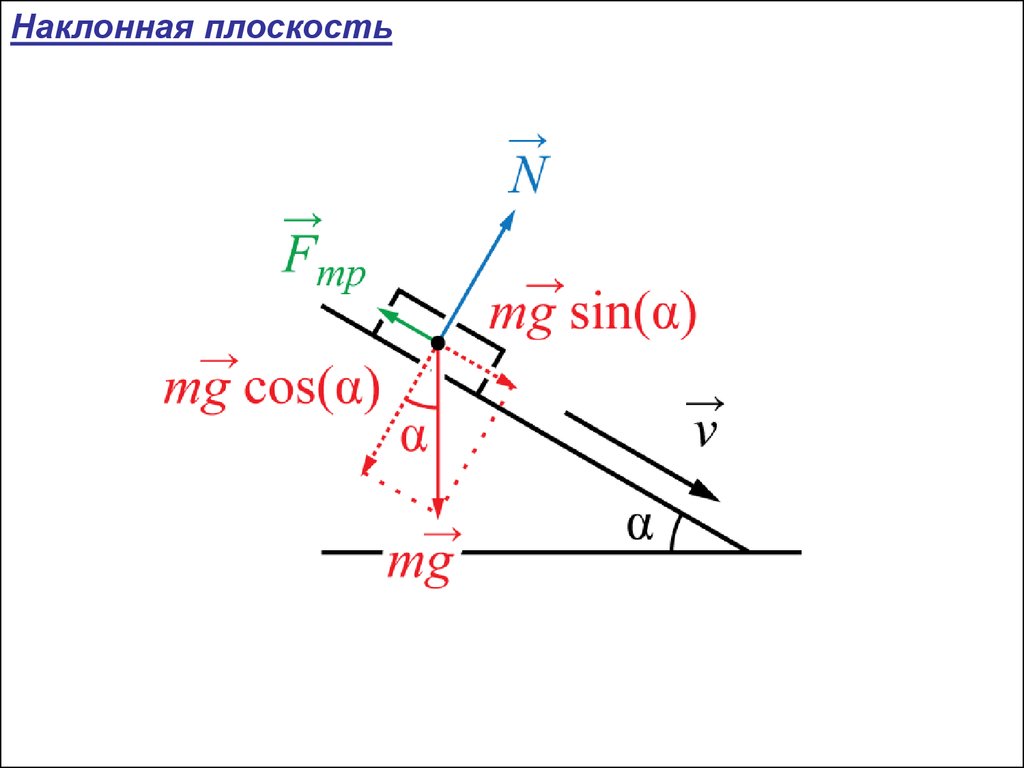
21.
Наклонная плоскость22.
Работа и мощностьЕсли мы прикладываем к телу силу и перемещаем его
на определённое расстояние, то говорят, что совершается
работа.
Работа, совершаемая постоянной (как по величине, так
и по направлению) силой при перемещении тела
определяется
A FS cos F S
где F - постоянная сила, S - результирующее
перемещение, ά - угол между направлениями
силы и перемещения
Работа – это скалярная величина.
Единицей измерения работы является джоуль (Дж).
Джоуль представляет собой, работу движущей силы в 1
ньютон на отрезке пути в 1 метр: 1Дж = 1Н·1м
23.
Во многих случаях в процессе движения сила меняется повеличине или направлению.
Если сила не постоянна, то производимое при движении
приращение работы на бесконечно малом отрезке пути dr
запишется в виде
dA F dr
D
С
Полная работа, производимая
при перемещении тела из точки
C в точку D, равна:
24.
Полезно заметить, что в отличие от 2 закона Ньютона вформулах для вычисления работы под F совсем не
обязательно понимать равнодействующую всех сил; это
может быть одна из многих сил или равнодействующая
нескольких сил.
Знак работы зависит от угла ά!
25.
Для характеристики скорости выполненияработы вводят понятие мощности.
Мощность – это физическая величина численно
равная работе, совершенной в единицу времени:
dA
N
Fv cos
dt
Единица мощности – 1ватт (Вт). 1Вт = 1 Дж/с.