








 mathematics
mathematicsSimilar presentations:










Линейная алгебра. Ранг матрицы. (Тема 2)
1. Ранг матрицы
В матрице размера m x n вычеркиванием каких-либо строк и столбцов можновыделить квадратные подматрицы k-го порядка, где k≤min(m; n). Определители
таких подматриц называются минорами k-го порядка матрицы А.
Рангом матрицы А называется наивысший порядок отличных от нуля миноров
этой матрицы.
• Ранг матрицы А обозначается rang A или r(A).
Из определения следует:
• ранг матрицы размера m x n не превосходит меньшего из её размеров, т.е.
r(A) ≤ min (m; n).
• r(A)=0 тогда и только тогда, когда все элементы матрицы равны нулю, т.е.
А=0.
• Для квадратной матрицы n-го порядка r(A) = n тогда и только тогда, когда
матрица А – невырожденная.
2.
В общем случае определение ранга матрицыперебором всех миноров достаточно трудоемко. Для
облегчения этой задачи используются элементарные
преобразования, сохраняющие ранг матрицы:
• Отбрасывание нулевой строки (столбца).
• Умножение всех элементов строки (столбца) матрицы на число, не
равное нулю.
• Изменение порядка строк (столбцов) матрицы.
• Прибавление к каждому элементу одной строки (столбца)
соответствующих элементов другой строки (столбца), умноженных на
любое число.
• Транспонирование матрицы.
Теорема. Ранг матрицы не изменится
элементарных преобразованиях матрицы.
при
3.
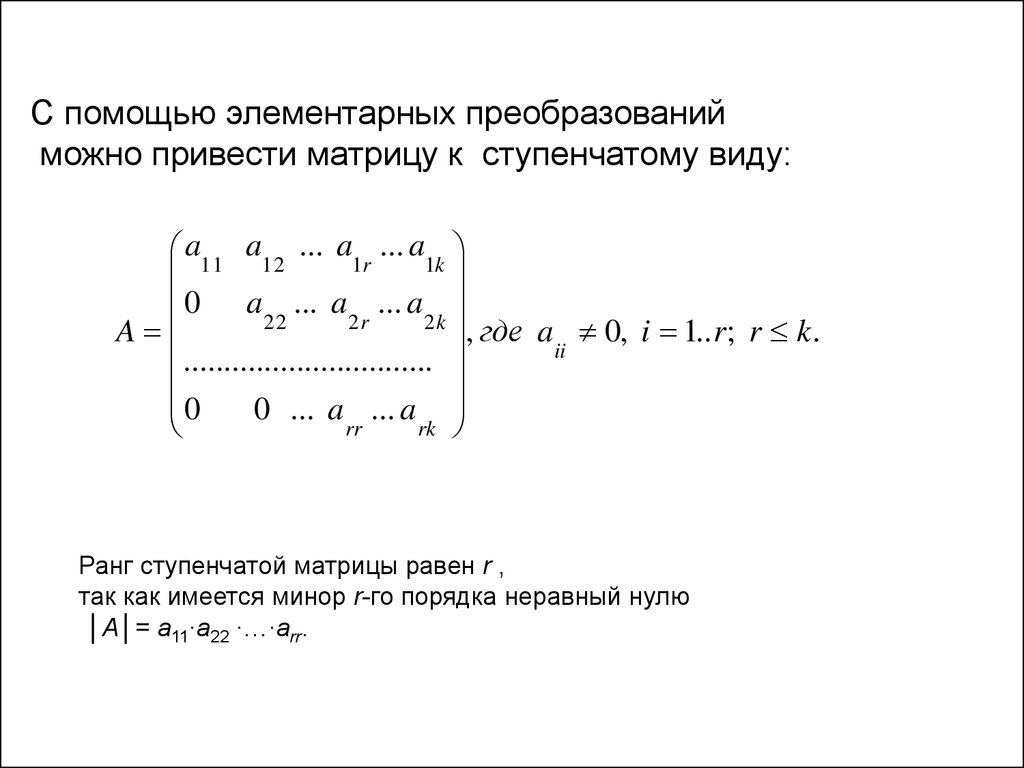
С помощью элементарных преобразованийможно привести матрицу к ступенчатому виду:
a11 a12 ... a1r ... a1k
0 a ... a ... a
22
2r
2k
A
, где aii 0, i 1..r; r k .
...............................
0
0 ... a ... a
rr
rk
Ранг ступенчатой матрицы равен r ,
так как имеется минор r-го порядка неравный нулю
│А│= а11∙а22 ∙…∙аrr.
4. Система линейных уравнений
Система m линейных уравнений с nпеременными имеет вид:
a11 x1 a12 x 2 .... a1 j x j ... a1n x n b1 ;
a 21 x1 a 22 x 2 .... a 2 j x j ... a 2 n x n b2 ;
...
ai1 x1 a i 2 x 2 ... aij x j .... ain x n bi ;
...
a m1 x1 a m 2 x 2 ... a mj x j ... a mn x n bm
1
5.
где aij, bi (i =1..m; j =1..n) – произвольные числа, называемыесоответственно коэффициентами при переменных и
свободными членами уравнений.
Решением системы (1) называется такая совокупность n
чисел (x1=k1, x2=k2, … xn=kn), при подстановке которых в (1)
каждое уравнение системы обращается в верное равенство.
Система уравнений называется совместной, если она имеет
хотя бы одно решение, и несовместной, если она не имеет
решений.
Совместная система, называется определенной, если она
имеет единственное решение, и неопределенной, если она
имеет более одного решения.
6.
a ... aa
x
b
12
1n
11
1
1
a
x
b
a ... a
21
22
2
n
2
A
; X
; B 2 ,
.......... .......... .......
...
...
x
a ... a
b
a
m2
mn
n
n
m1
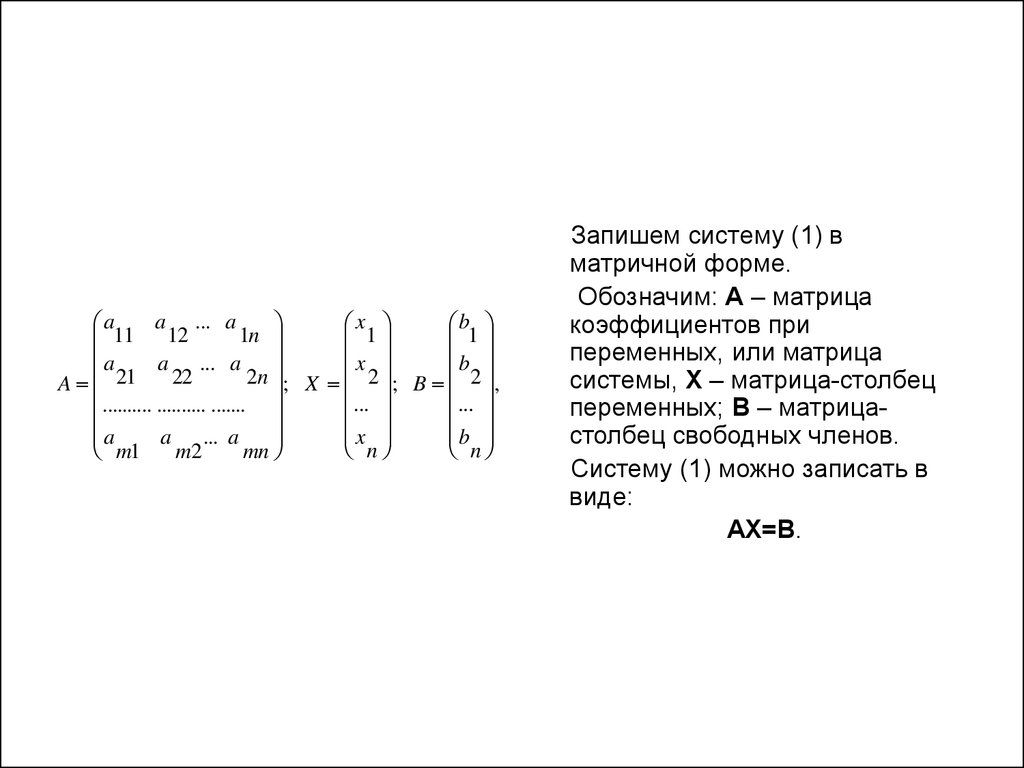
Запишем систему (1) в
матричной форме.
Обозначим: А – матрица
коэффициентов при
переменных, или матрица
системы, Х – матрица-столбец
переменных; В – матрицастолбец свободных членов.
Систему (1) можно записать в
виде:
АХ=В.
7. Системы n линейных уравнений с n переменными
Пусть число уравнений системы (1) равно числу переменных, т.е.m=n. Тогда матрица системы является квадратной, а её определитель
Δ=│А│называется определителем системы.
Предположим, что │А│не равен нулю, тогда существует обратная
матрица А-1.
Умножая слева обе части матричного равенства на обратную матрицу
А-1 получим:
А-1 (АХ)= А-1 В.
(А-1 А)Х =ЕХ =Х
Решением системы уравнений методом обратной матрицы будет
матрица-столбец:
Х= А-1В.
8. Метод Крамера
Теорема Крамера. Пусть Δ – определитель матрицы системы А,а Δj – определитель матрицы, полученный из матрицы заменой j-го
столбца столбцом свободных членов. Тогда если Δ не равен нулю,
то система имеет единственное решение, определённое по
формулам Крамера:
xj
j
, j 1,2,..., n
9. Метод Гаусса
Метод Гаусса – метод последовательного исключения переменных –заключается в том, что с помощью элементарных преобразований
система уравнений приводится к равносильной системе ступенчатого или
треугольного вида.
a
a ... a
b
Рассмотрим матрицу:
1n 1
11 12
a
a ... a
b
21 22
2n 2
........................... .....
b
a
a ... a
m1 m 2
mn m
эта матрица называется расширенной матрицей системы (1), так как в
нее кроме матрицы системы А, дополнительно включен столбец
свободных членов.
10.
П р и м е р 1. Методом Гаусса решить систему:3x x 5 x 2,
3
1 2
x1 3x2 4 x3 3,
2 x1 4 x2 3x3 1.
Р е ш е н и е.
Прямой ход метода Гаусса.
Запишем расширенную матрицу системы
и с помощью элементарных преобразований приведём
матрицу к треугольному виду:
1. Поменяем местами 1-ю и 2-ю строки.
2. 1-ю строку умножим на (-3) и прибавим ко 2-й,
потом 1-ю умножим на (-2) и прибавим к 3-й.
3. 3-ю строку умножим на (-4) и прибавим ко 2-й, получим
эквивалентную матрицу.
4. 3-ю строку разделим на 13
11.
3 -1 5 2 1 - 3 4 3 1 - 3 4 31 - 3 4 3 3 -1 5 2 0 8 - 7 - 7
2 - 4 3 1 2 - 4 3 1 0 2 -5 -5
1 - 3 4 3 1 - 3 4 3
0 8 - 7 - 7 0 8 - 7 - 7 .
0 0 13 13 0 0 1 1
12. Обратный ход метода Гаусса.
х 1,3
8 х 2 7 х3 7,
х1 3 х 2 4 х3 3.
х 1, х 0, х 1.
3
2
1
13.
ТеоремаКронекераКапелли.
• Система линейных уравнений совместна тогда и только тогда, когда ранг
матрицы системы равен рангу расширенной матрицы этой системы.
• Если ранг матрицы совместной системы равен числу переменных, т.е. r = n, то
система (1) определенная и имеет единственное решение;
1.
2.
• Если ранг матрицы совместной системы меньше числа переменных, т.е. r < n, то
система (1) - неопределённая и имеет бесконечное множество решений.
• Пусть r<n, тогда r переменных называются основными (или базисными), если
определитель матрицы из коэффициентов при них (т.е. базисный минор) отличен от
нуля. Остальные n-r переменных называются неосновными (или свободными).
• Для построения общего решения, содержащего все возможные решения системы
уравнений, необходимо базисные переменные выразить через свободные.
• Решение системы (1), в котором все n- r неосновных переменных равны нулю,
называется базисным.
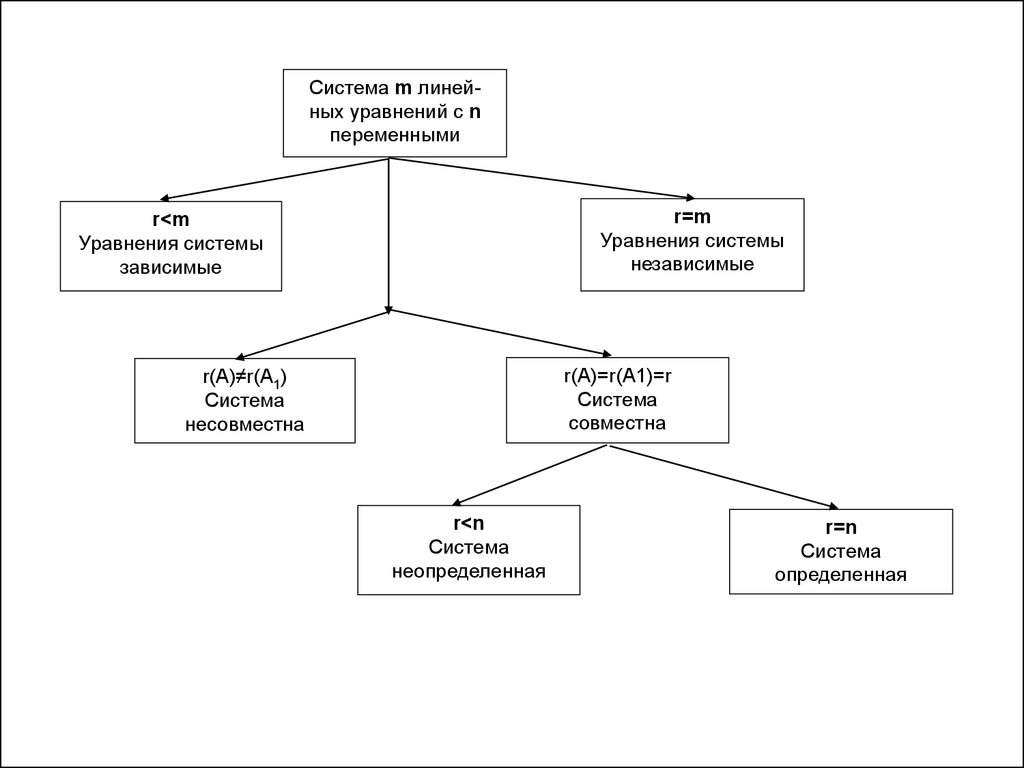
14.
Система m линейных уравнений с nпеременными
r=m
Уравнения системы
независимые
r<m
Уравнения системы
зависимые
r(A)=r(A1)=r
Система
совместна
r(A)≠r(A1)
Система
несовместна
r<n
Система
неопределенная
r=n
Система
определенная