


































































 industry
industrySimilar presentations:



")






Автоматичне керування зварюванням
1. Автоматичне керування зварюванням
Презентація Бариги2. Основні поняття
МЕХАНІЗАЦІЯ – напрямок технічногопрогресу, спрямований на заміну фізичної
роботи людини роботою механізмів і машин.
3.
Основні поняттяАВТОМАТИЗАЦІЯ
— напрямок технічного
прогресу, спрямований на
заміну розумової і
фізичної праці людини
роботою самодіючих
систем (автоматів)
4.
Часто під терміном АВТОМАТИЗАЦІЯ розуміютьтакож сам процес впровадження у виробництво
автоматів і автоматичних систем.
Часто під терміном
АВТОМАТИЗАЦІЯ розуміють
також сам процес впровадження у
виробництво автоматів і
автоматичних систем.
5.
Часто під терміном МЕХАНІЗАЦІЯ розуміють такожсам процес впровадження у виробництво машин і
механізмів.
6.
Основні поняттяАВТОМАТ – пристрій, що виконує
деякий процес без безпосередньої участі
людини.
7.
Основні поняттяТеорія автоматичного керування —
розділ технічної кібернетики, що вивчає
системи автоматичного керування різної
природи та складності
8.
Основні поняттяТеорія автоматичного керування замість
реальних об’єктів розглядає адекватні їм
математичні моделі
G(s) b0 s m b1 s m 1 ... bm 1 s bm
W ( s)
H (s) a 0 s n a1 s n 1 ... a n 1 s a n
9.
Основні поняттяМатематична модель — система
математичних співвідношень, яка описує
суттєві властивості системи або процесу,
що вивчається.
mv
F
r
2
10.
Основні поняттяАвтоматичне керування — сукупність
дій, які спрямовані на здійснення
технологічного процесу або операції за
певним законом без безпосередньої участі
людини
11.
Основні поняттяСистема автоматичного керування
— сукупність об'єкта керування і
технічних керуючих пристроїв, які
взаємодіють з об'єктом відповідно до
закону керування
12.
Основні поняттяСистема автоматичного керування (регулювання)
Керуючі
(регулюючі) дії
Xi(t)
Вхідні дії
КП
Xрk(t)
Збурення
Zn(t)
О
Yj(t)
Керовані
величини
13.
Основні поняттяКеровані величини — сукупність
вихідних фізичних величин які в наслідок
керування мають набути заданих значень
14.
Основні поняттяВхідні дії — дії, що надають інформацію
про задачі керування
15.
Основні поняттяКеруючі дії — дії, що безпосередньо
діють на об'єкт керування
16.
Основні поняттяЗбурення — зовнішні дії на систему АК,
які порушують встановлений зв'язок між
вхідними діями і керованими величинами
17.
Принципи автоматичногокерування
Принцип автоматичного керування
визначає, як і на основі якої інформації
формуються керуючі дії в системі
18.
Принципи автоматичногокерування
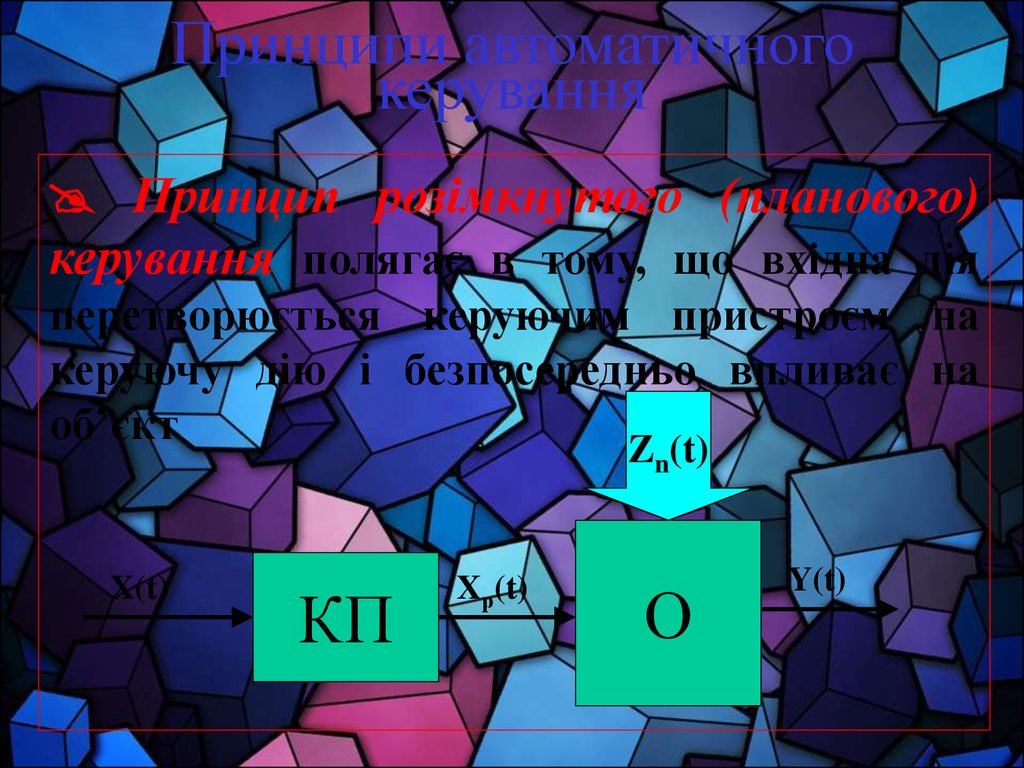
Принцип розімкнутого (планового)
керування полягає в тому, що вхідна дія
перетворюється керуючим пристроєм на
керуючу дію і безпосередньо впливає на
об’єкт
Zn(t)
X(t)
КП
Xр(t)
О
Y(t)
19.
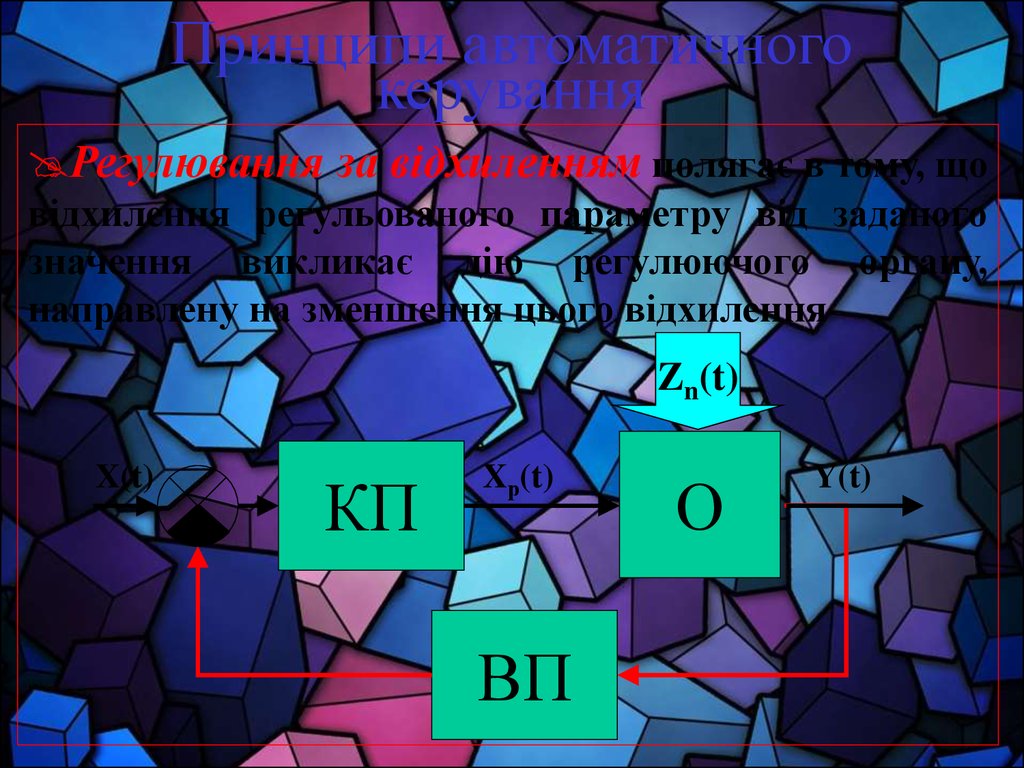
Принципи автоматичногокерування
Регулювання за відхиленням полягає в тому, що
відхилення регульованого параметру від заданого
значення викликає дію регулюючого органу,
направлену на зменшення цього відхилення
Zn(t)
X(t)
КП
Xр(t)
ВП
О
Y(t)
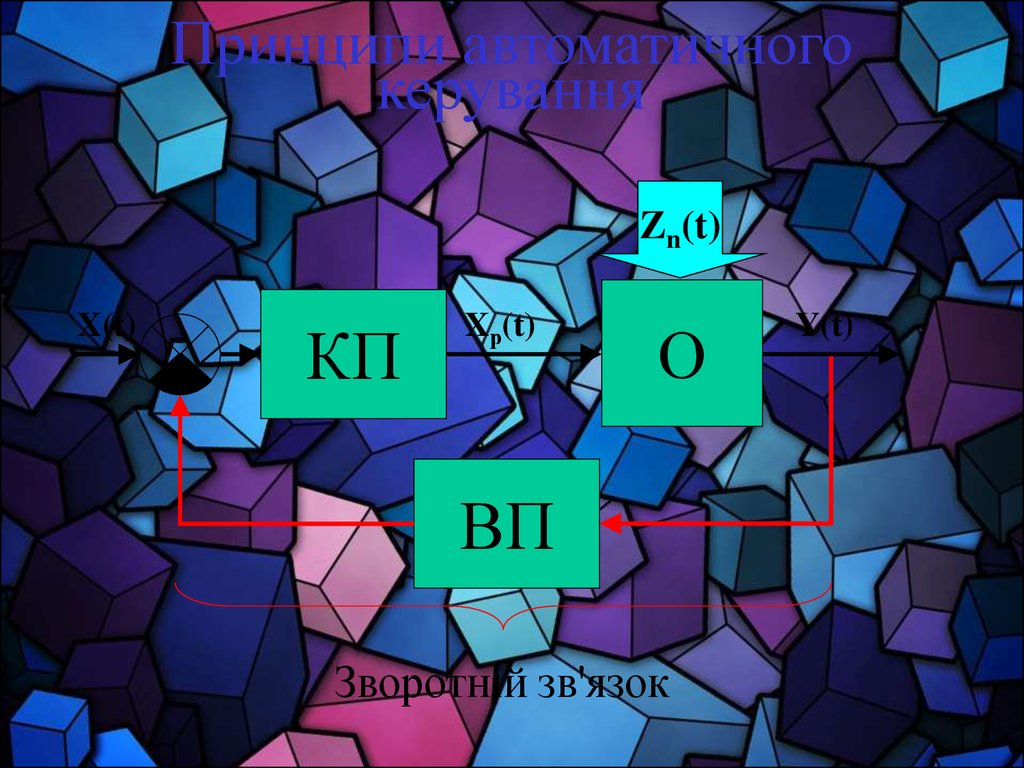
20.
Принципи автоматичногокерування
Zn(t)
X(t)
КП
Xр(t)
О
ВП
Зворотній зв'язок
Y(t)
21.
Принципи автоматичногокерування
Від'ємний (негативний) зворотній зв’язок —
зв'язок, при якому вихідний сигнал ( або його
частина) віднімається від вхідного сигналу
Додатній (позитивний) зворотній зв’язок —
зв'язок, при якому вихідний сигнал (або його
частина) додається до вхідного сигналу.
22.
Принципи автоматичногокерування
Регулювання за збуренням полягає в тому, що в
результаті вимірювання одного або кількох збурень
формується дія, яка коректує керуючу дію для компенсації
впливу цих збурень на керовану величину
ВП
X(t)
КП
Xр(t)
Zn(t)
О
Y(t)
23.
Принципи автоматичногокерування
Комбіноване
керування
є поєднанням принципів
керування за відхиленням і збуренням в одній системі
автоматичного керування
Zm(t)
ВП2
X(t)
КП
Xр(t)
ВП1
Zn(t)
О
Y(t)
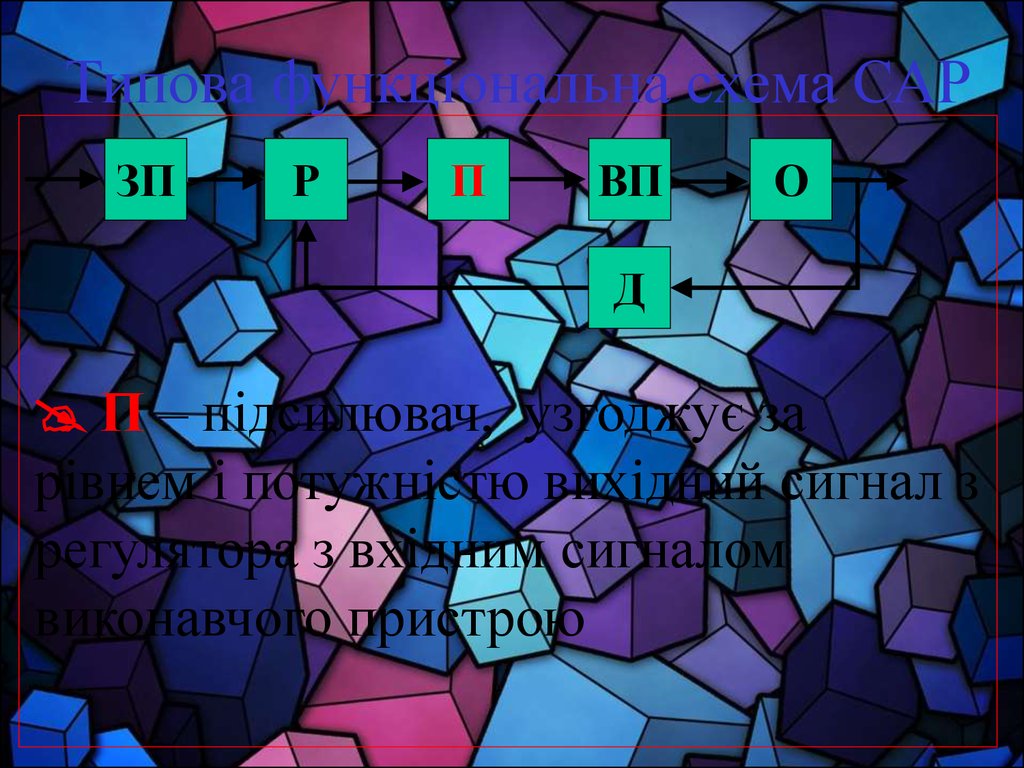
24.
Типова функціональна схема САРТипова функціональна схема САР, що реалізує принцип
регулювання за відхиленням відображає взаємодію
об'єкту регулювання ОР і регулятора Р, поданого у
розгорнутому вигляді.
ЗП
Р
П
ВП
Д
О
25.
Типова функціональна схема САРЗП
Р
П
ВП
Д
О – об’єкт регулювання
О
26.
Типова функціональна схема САРЗП
Р
П
ВП
О
Д
ЗП - задавальний пристрій,
служить для перетворення задавальної
дії в сигнал, придатний для подальшої
роботи системи
27.
Типова функціональна схема САРЗП
Р
П
ВП
О
Д
Р – регулятор, пристрій, який
служить для реалізації необхідного
закону керування
28.
Типова функціональна схема САРЗП
Р
П
ВП
О
Д
П – підсилювач, узгоджує за
рівнем і потужністю вихідний сигнал з
регулятора з вхідним сигналом
виконавчого пристрою
29.
Типова функціональна схема САРЗП
Р
П
ВП
О
Д
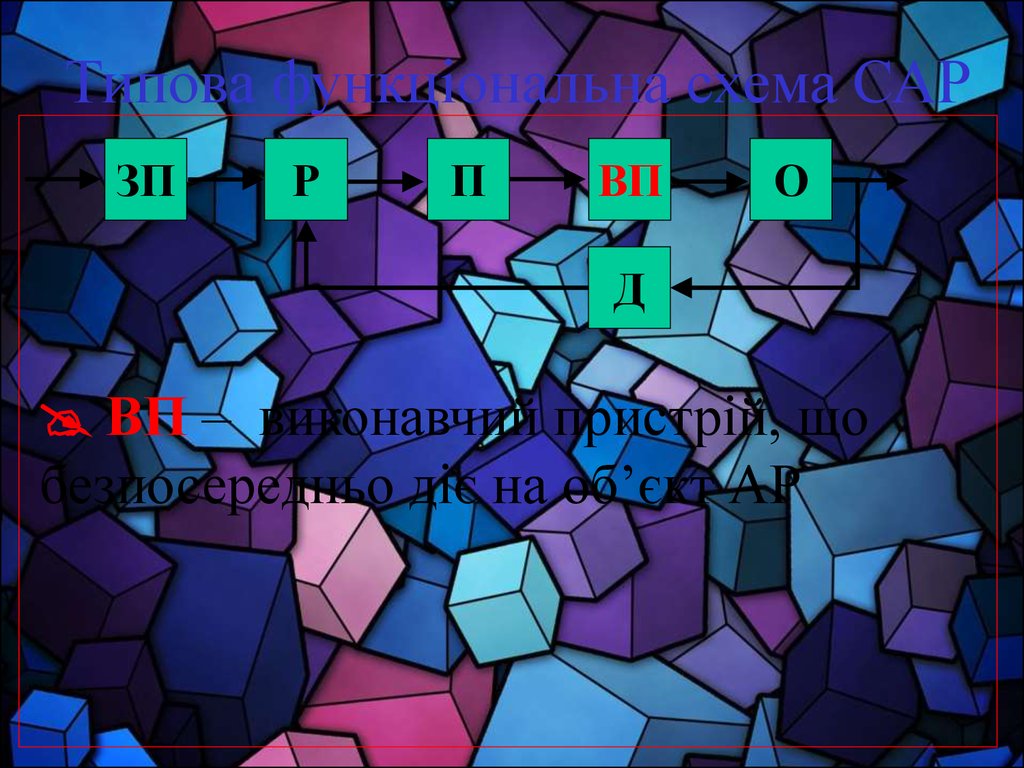
ВП – виконавчий пристрій, що
безпосередньо діє на об’єкт АР
30.
Типова функціональна схема САРЗП
Р
П
ВП
О
Д
Д – датчик, елемент системи, що
перетворює інформацію про фізичну
величину в сигнал, зручний для
використання в САР
31.
Типова функціональна схема САРРеальні системи автоматичного регулювання можуть
містити складні елементи, які в свою чергу, можуть
розглядатись як системи автоматичного керування.
Наведена система керування за відхиленням містить
виконавчий пристрій, який є окремою системою
автоматичного регулювання і працює за збуренням і
відхиленням одночасно
ВП
ВП2
ЗП
Р
П
Zn(t)
Р1 П1 ВП1
Д1
Д
О
32.
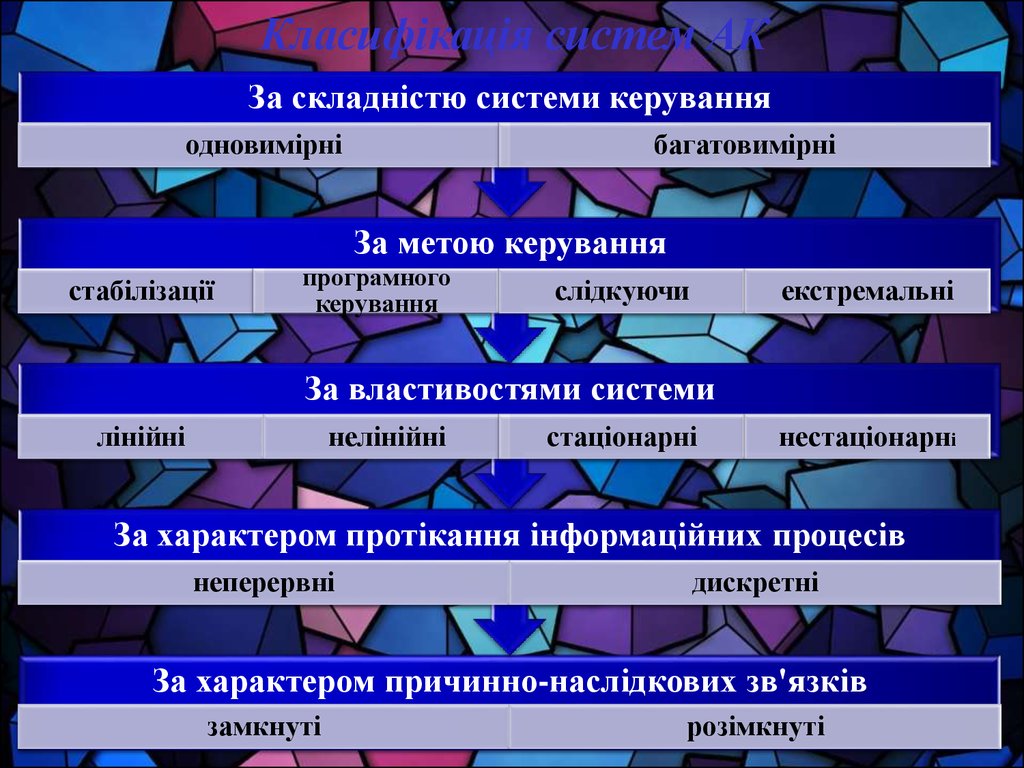
Класифікація систем АКЗа складністю системи керування
одновимірні
багатовимірні
За метою керування
стабілізації
програмного
керування
слідкуючи
екстремальні
За властивостями системи
лінійні
нелінійні
стаціонарні
нестаціонарні
За характером протікання інформаційних процесів
неперервні
дискретні
За характером причинно-наслідкових зв'язків
замкнуті
розімкнуті
33.
Класифікація систем автоматичногокерування за ступенем складності
За складністю керованого об’єкту системи
автоматичного керування поділяють на:
одновимірні системи
багатовимірні системи:
•багатоконтурні
•незв’язні системи
•зв’язні системи
•складні системи
34.
Класифікація систем автоматичногокерування за ступінню складності
Одномірні системи — це системи, стан
яких визначається одним вихідним
параметром і однією вхідною дією
X(t)
САР
Y(t)
35.
Класифікація систем автоматичногокерування за ступенем складності
Багатовимірні системи — це системи,
стан яких визначається багатьма вихідними
параметрами і (або) багатьма вхідними діями
X1(t)
X2(t)
САР
Y(t)
Y1(t)
X (t)
САР
Y2(t)
36.
Класифікація систем автоматичногокерування за ступенем складності
Багатоконтурні системи — це
системи, які мають два і більше замкнутих
контурів передачі дії
Подавання
електродного дроту
(контур 1)
Подавання захисного
газу (контур 2)
Джерело живлення
(контур 3)
Обертання виробу
(контур 4)
37.
Класифікація систем автоматичногокерування за ступінню складності
Незв'язана система або система
незв'язаного керування — це система, яка
містить кілька самостійних керуючих
пристроїв, кожний з яких керує однією,
незалежною від інших регульованих
параметрів, величиною
С1
С2
38.
Класифікація систем автоматичногокерування за ступінню складності
Зв'язна система або система
зв'язаного керування — система, яка
містить внутрішні зв'язки між керованими
величинами
С1
С2
39.
Класифікація систем автоматичногокерування за ступінню складності
Складні системи керування — це
узагальнююча назва систем
які неможливо описати коректно математично
які містять велику кількість елементів,
пов'язаних між собою невідомим чином
в яких невідома природа явищ, що відбуваються
40.
Класифікація систем автоматичногокерування за метою керування
За метою керування САР поділяють на
такі групи:
• системи автоматичної стабілізації
• системи програмного керування
• слідкуючи системи
• екстремальні системи
41.
Класифікація систем автоматичногокерування за метою керування
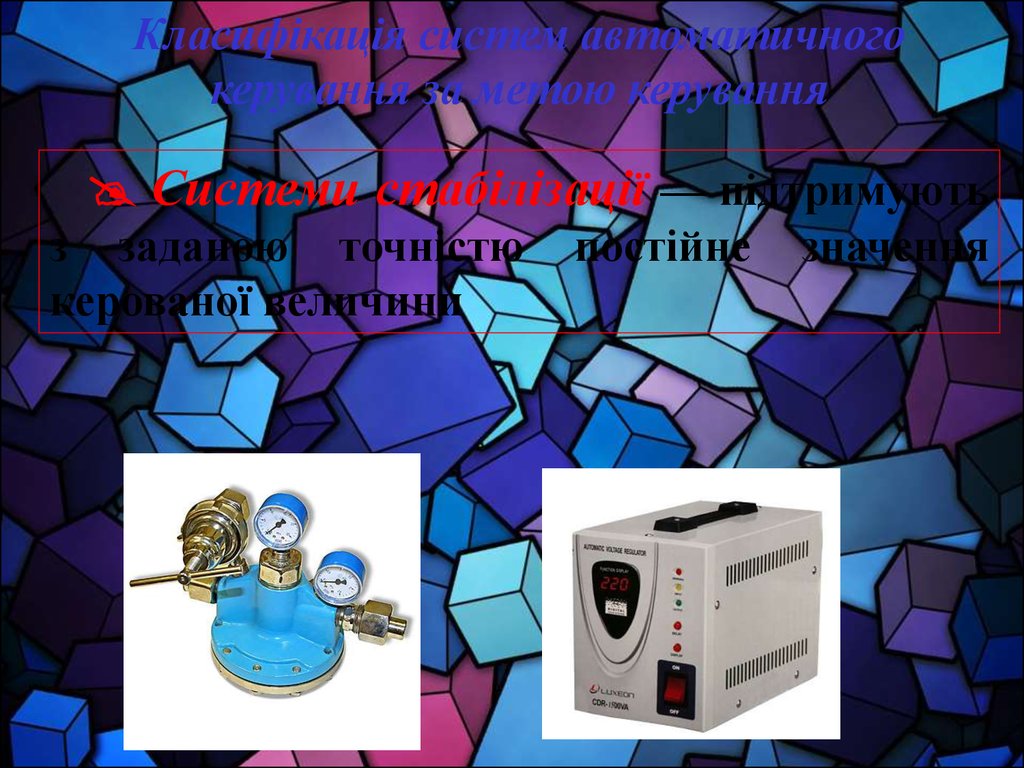
Системи стабілізації — підтримують
з заданою точністю
керованої величини
постійне
значення
42.
Класифікація систем автоматичногокерування за метою керування
Системи програмного керування
— автоматично змінюють з заданою
точністю керовану величину за наперед
заданим законом в функції часу або
координат
43.
Система програмного керуванняСВ
ПП
КП
О
К
44.
Класифікація систем автоматичногокерування метою керування
Слідкуючи системи — автоматично
змінюють з заданою точністю керовану
величину у відповідності з наперед невідомою
функцією часу, що визначається вхідною дією
45.
Класифікація систем автоматичногокерування за метою керування
Екстремальні системи — системи, в
яких
автоматично
визначається
і
підтримується
режим
роботи,
що
характеризується екстремальним значенням
показника якості
46.
Класифікація систем САР за властивостямиЛінійні системи – системи, властивості
яких не залежать від величини вхідної дії.
Для лінійних систем справедливий принцип
суперпозиції і гомогенності
Нелінійні системи – системи,
властивості яких залежать від величини
вхідної дії. Для не лінійних систем принципи
суперпозиції і гомогенності не виконуються
47.
Класифікація систем САР за властивостямиЛінеарізація системи автоматичного керування
y (t ) g[ x(t )]
dg
y g ( x) g ( x0 )
dx
y y0 m( x x0 )
x x0
x x0 d 2 g
1!
dx 2
x x0
2
x x0
...
2!
( y y0 ) m( x x0 )
y m x
f
f0
f=y2
df
dy
y y0
y
48.
Класифікація систем САР за властивостямиСтаціонарні
системи — це системи які не
змінюють свої властивості з часом
Нестаціонарні
системи (інша назва — зі
змінними коефіцієнтами) — це системи, що
змінюють свої властивості з плином часу
49.
Класифікація систем САР за характеромпротікання інформаційних процесів
За характером протікання інформаційних
процесів САР поділяють на
• системи неперервної дії
• дискретної дії:
релейні
імпульсні:
амплітудно-імпульсні
широтно-імпульсні
частотно-імпульсні
цифрові
50.
Класифікація систем САР за характеромпротікання інформаційних процесів
Неперервні системи — це системи, в
яких зміна регульованої величини веде до
неперервної передачі дії по всьому
замкнутому колу. Неперервні системи
мають також назву аналогових систем.
51.
Класифікація систем САР за характеромпротікання інформаційних процесів
Дискретні системи — це системи, в
яких передається та перетворюється
сигнал, квантований за рівнем або/і за
часом.
52.
Класифікація систем САР за характеромпротікання інформаційних процесів
Залежно від виду квантування розрізняють
системи:
•релейні;
•імпульсні;
•цифрові.
53.
Класифікація систем САР за характеромпротікання інформаційних процесів
Релейні системи - такі, до складу
яких входить релейний елемент,
завдяки якому регулююча дія на виході
регулятора може приймати два або три
постійних значення.
54.
Класифікація систем САР за характеромпротікання інформаційних процесів
Імпульсні системи - системи, в яких
сигнал квантується за часом (сигнал
дискретний за часом) і керуюча дія
видається у визначені моменти часу і
відсутня в проміжках між ними.
55.
Класифікація систем САР за характеромпротікання інформаційних процесів
Амплітудно-імпульсні системи
(A = var, T=const, f=const, =const)
A
T
t
56.
Класифікація систем САР за характеромпротікання інформаційних процесів
Широтноно-імпульсні системи
(A = const, T= const, f=const, = var)
T
ti
A
T
tі
T
tі
T
tі
T
tі
T
tі
T
tі
t
57.
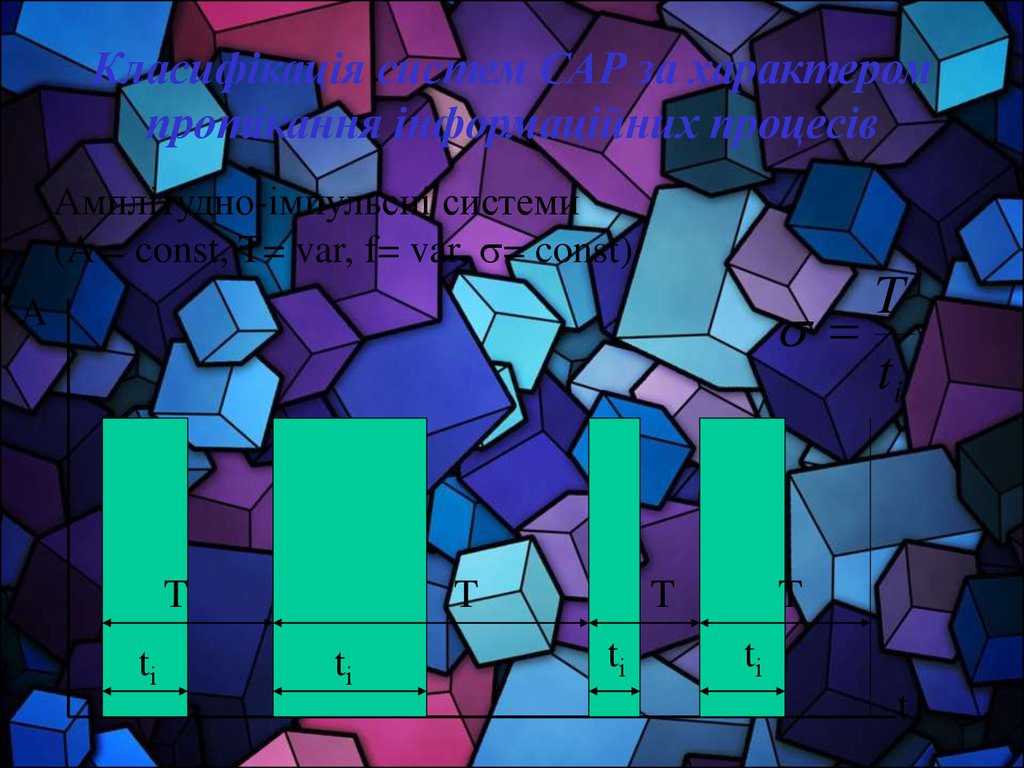
Класифікація систем САР за характеромпротікання інформаційних процесів
Амплітудно-імпульсні системи
(A = const, T= var, f= var, = const)
T
ti
A
T
tі
T
tі
T
tі
T
tі
t
58.
Цифрова система керуванняЦифрові системи керування —
системи в яких керуюча дія (сигнал)
квантований за часом і за амплітудою,
відображається у вигляді коду
59.
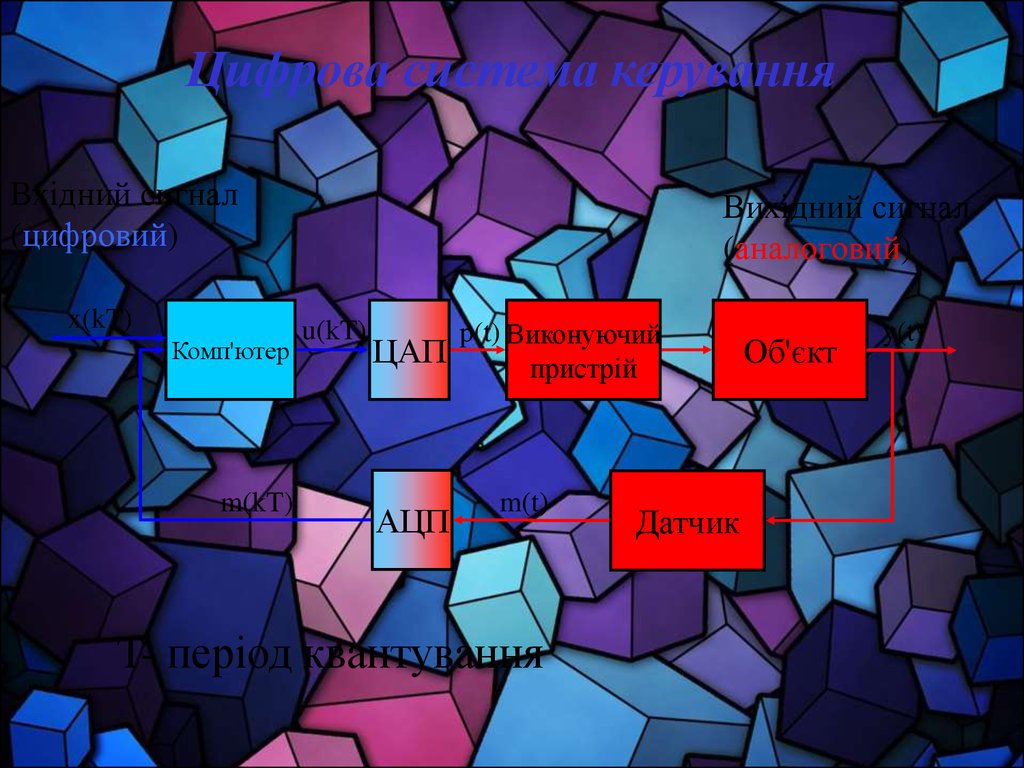
Цифрова система керуванняВхідний сигнал
(цифровий)
x(kT)
Комп'ютер
m(kT)
Вихідний сигнал
(аналоговий)
u(kT)
p(t) Виконуючий
ЦАП
пристрій
АЦП
m(t)
T- період квантування
Датчик
Об'єкт
y(t)
60.
Цифрова система керуванняЦифро-аналоговий перетворювач (ЦАП,
DAC) - пристрій для перетворення цифрового
коду в аналоговий сигнал.
Цифро-аналогові перетворювачі є інтерфейсом
між дискретним цифровими і аналоговими
сигналами.
61.
Цифрова система керуванняАналого-цифровий перетворювач (АЦП,
ADC) - пристрій, що перетворить вхідний
аналоговий сигнал у цифровий сигнал.
Аналогово-цифрові перетворювачі є
інтерфейсом між аналоговими і дискретним
цифровими сигналами.
62.
Класифікація систем автоматичногокерування за характером причиннонаслідкових зв'язків
Замкнуті системи — це системи
автоматичного керування, в яких керуюча
дія виробляється з урахуванням значення
керованої величини, яке досягається в
результаті керування
63.
Класифікація систем автоматичногокерування за характером причиннонаслідкових зв'язків
Розімкнуті системи — системи, в яких
керуюча дія виробляється без урахування
значення
керованої
величини,
яке
досягається в результаті керування
64.
Аналіз систем автоматичного керуванняАналіз системи — дослідження САР з
метою визначення ступеня їх відповідності
вимогам, що висуваються
65.
Аналіз систем автоматичного керуванняЯкість процесів регулювання
це
узагальнена характеристика динамічних
властивостей автоматичних систем, яка
визначається поведінкою системи як в
перехідних процесах, так і в усталеному
режимі.
—
66.
Аналіз систем автоматичного керуванняСтатичний аналіз — дослідження умов
забезпечення
станів, тобто
системи
рівноважних
(усталених)
статичної характеристики
U
I
67.
Аналіз систем автоматичного керуванняДинамічний аналіз — дослідження
поведінки САР при порушенні рівноважного
стану процесу.
U
t
68.
Аналіз систем автоматичного керуванняЗадачі динамічного аналізу роботи САР:
•оцінка стійкості системи;
•визначення показників якості перехідного процесу;
•визначення впливу параметрів елементів, які
складають САР, на якісні показники перехідного
процесу.
69.
Аналіз систем автоматичного керуванняТипові дії — пробні вхідні дії, близькі
до найбільш несприятливих зі всієї
різноманітності можливих реальних дій
для конкретної системи.
70.
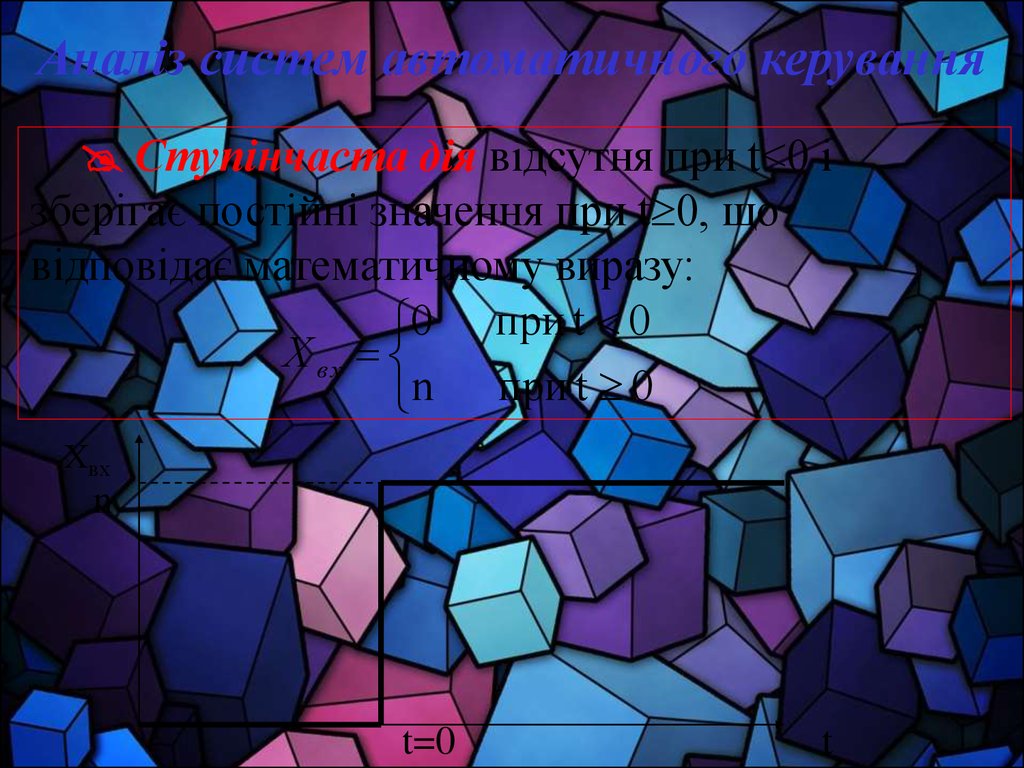
Аналіз систем автоматичного керуванняСтупінчаста дія відсутня при t<0 і
зберігає постійні значення при t 0, що
відповідає математичному виразу:
0 при t 0
X вх
n при t 0
Хвх
n
t=0
t
71.
Аналіз систем автоматичного керування-функція – імпульс нескінченно малої
протяжності і нескінченно великої амплітуди
a
(
t
)
dt
1
a
72.
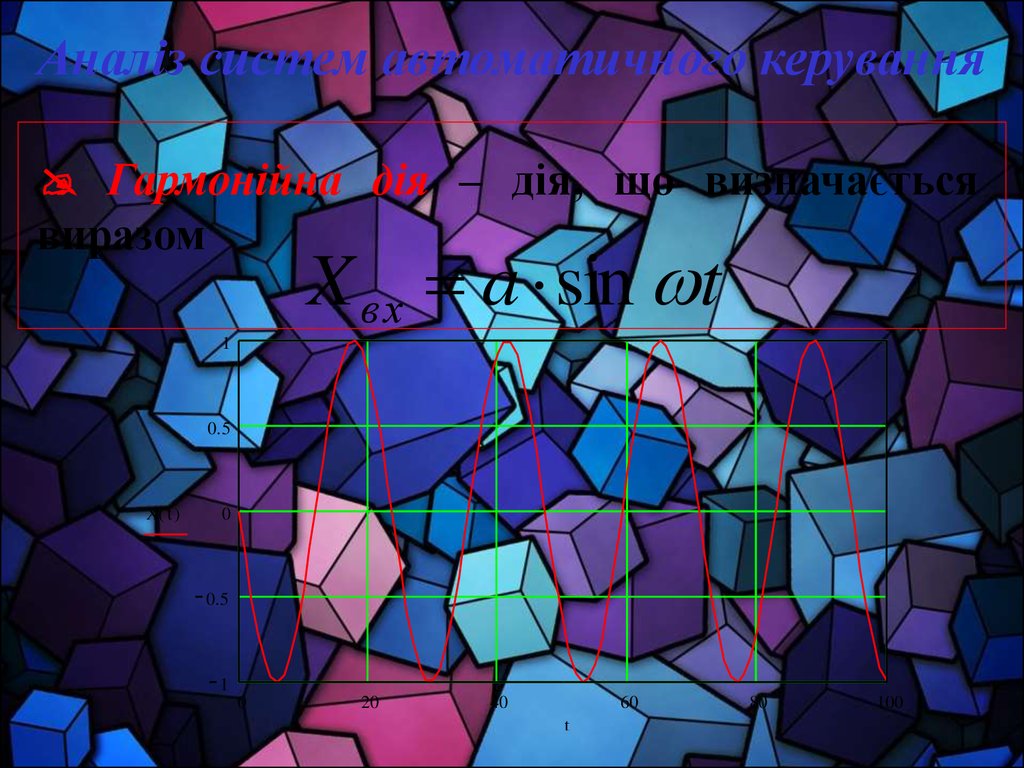
Аналіз систем автоматичного керуванняГармонійна дія – дія, що визначається
виразом
X вх a sin t
1
0.5
X( t )
0
0.5
1
0
20
40
60
t
80
100
73.
Показники якості статичних ідинамічних властивостей систем
Стійкість системи керування
це
обмежена реакція системи на обмежену
вхідну дію
—
74.
Показники якості статичних ідинамічних властивостей систем
7
6.609
6
5
4
Y( t )
3
2
1
0
0
0
0
1
5
2
3
t
4
5
5
Наведено графік перехідного процесу стійкої системи.
З плином часу перехідний процес завершується.
75.
Показники якості статичних ідинамічних властивостей систем
2500
1500
2142.86
1000
1785.71
500
0
1428.57
Y( t )
Y( t )
1071.43
500
714.29
1000
357.14
1500
0
2000
0
1
2
3
t
4
5
0
1
2
3
4
5
t
Наведено графіки перехідних процесів не стійких
систем. З плином часу перехідні процеси не
завершуються. Зміна вихідної величини при цьому
може відбуватись як аперіодично, так і коливально.
76.
Показники якості статичних ідинамічних властивостей систем
4.5
4
3.5
2
3
Y
2.5
Y(t)
Y( t )
2
1.5
1
0.5
0
0
1
2
3
t
4
t
tп – час перехідного процесу
5
77.
Показники якості статичних ідинамічних властивостей систем
Гармонійний коливальний процес характеризується
•швидкодією
•часом перехідного процесу
•перерегулюванням
•величиною періоду коливань T = 2 / ,
•логарифмічним декрементом затухання
D=ln(An/An+1)
78.
Показники якості статичних ідинамічних властивостей систем
7
6
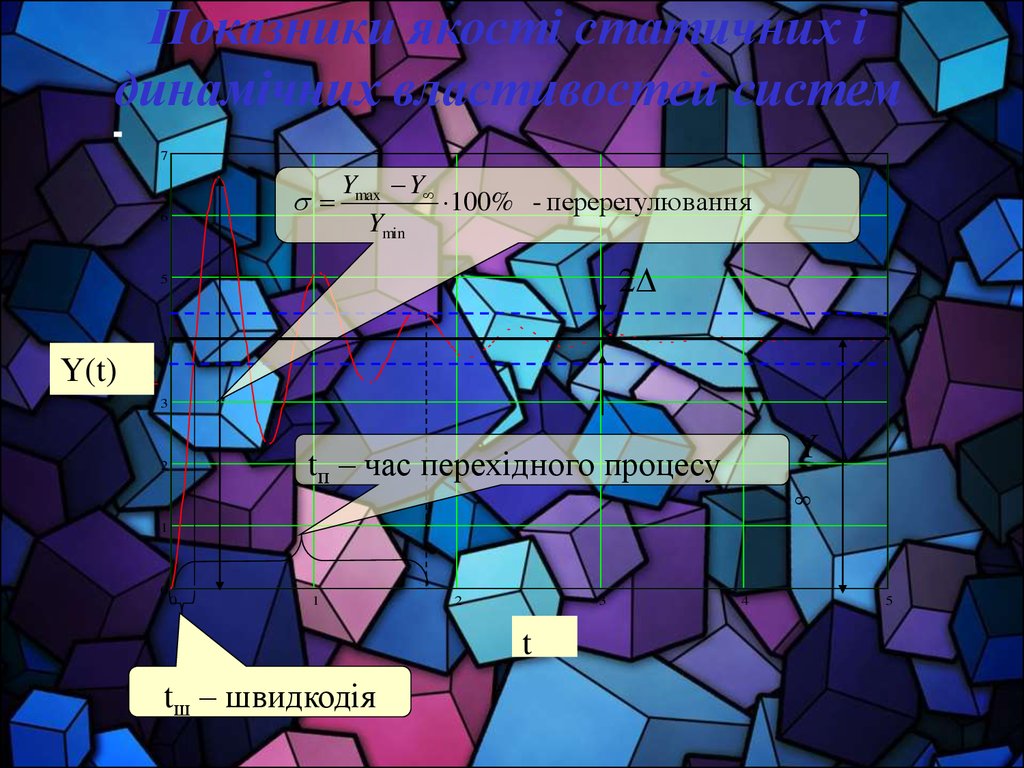
Ymax Y
100% - перерегулювання
Ymin
2
5
4
Y(t)
Y( t )
3
Y
tп – час перехідного процесу
2
1
0
0
1
2
3
t
t
tш – швидкодія
4
5
79.
Показники якості статичних ідинамічних властивостей систем
Точність відпрацювання задавальної дії
визначається як різниця між заданим
значенням регульованої величини і
отриманим в процесі регулювання.
(t)=Y(t)-X(t)
80.
Показники якості статичних ідинамічних властивостей систем
Точність роботи в умовах дії збурень
визначається як різниця між значенням
регульованої величини при відсутності
збурень і значенням регульованої величини
при наявності збурень.
(t)=Y(t)-Y(0)
81.
Показники якості статичних ідинамічних властивостей систем
Статична похибка системи — відхилення
керованої величини в сталому стані
Динамічна похибка — відхилення керованої
величини в перехідному процесі від заданого
(номінального) значення
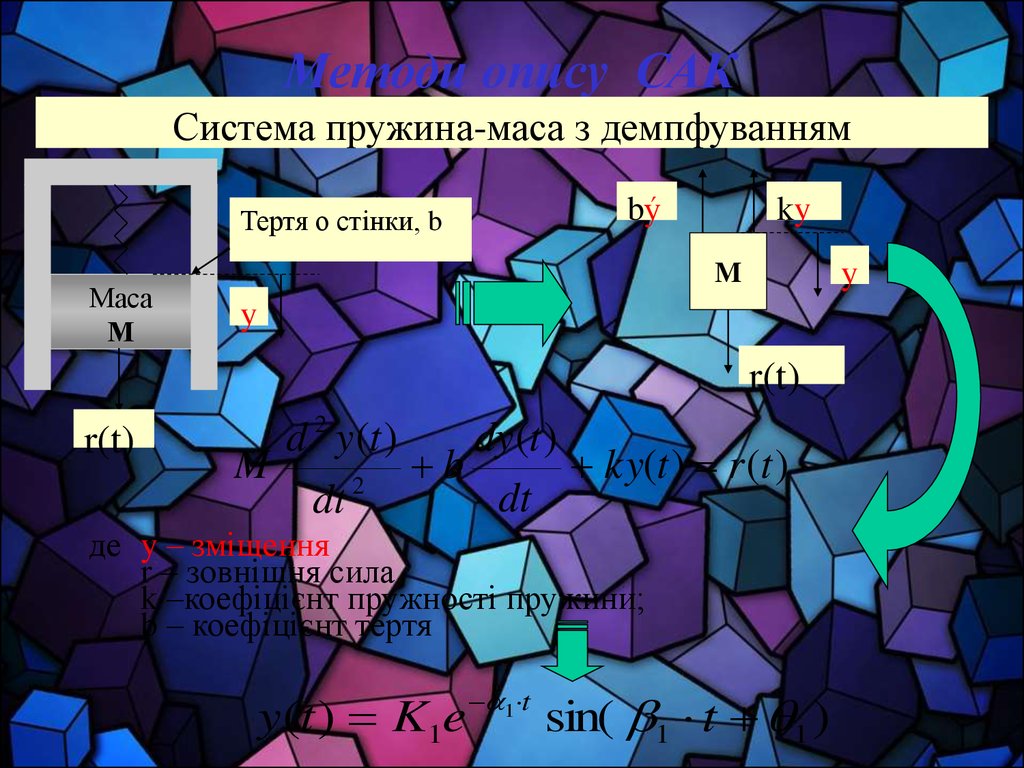
82.
Методи опису САКСистема пружина-маса з демпфуванням
bý
Тертя о стінки, b
Маса
М
ky
y
M
y
r(t)
r(t)
2
d y (t )
dy (t )
M
b
ky(t ) r (t )
2
dt
dt
де y – зміщення
r – зовнішня сила
k –коефіцієнт пружності пружини;
b – коефіцієнт тертя
y(t ) K1e
1 t
sin( 1 t 1 )
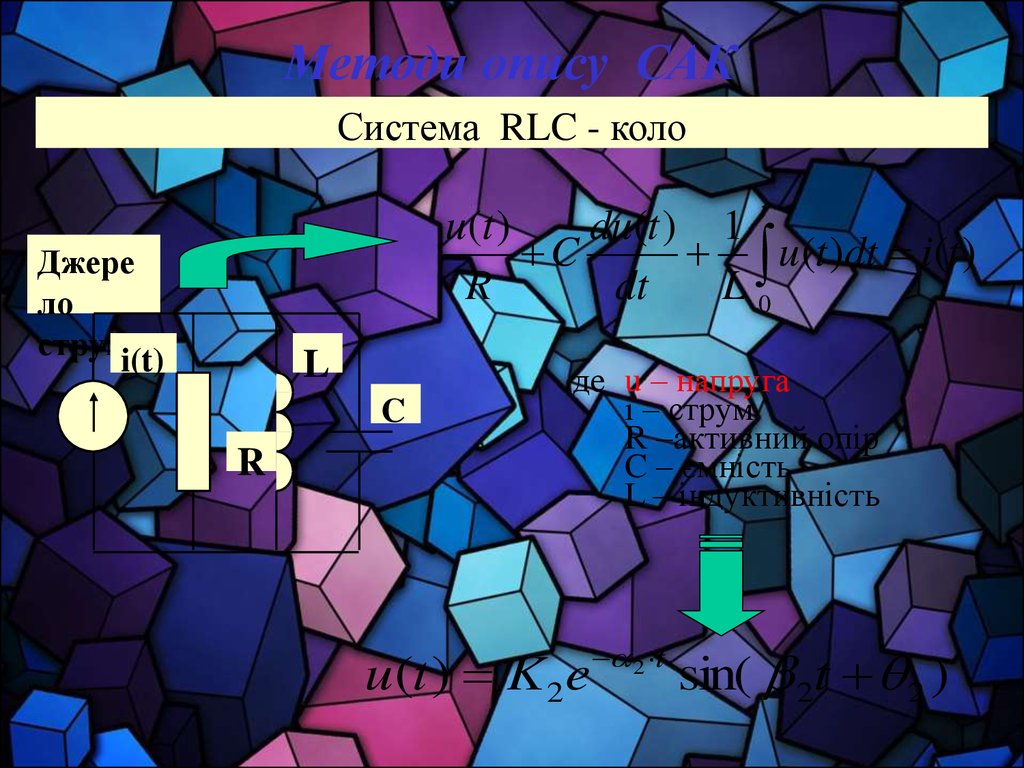
83.
Методи опису САКСистема RLC - коло
t
u (t )
du (t ) 1
C
u (t )dt i(t )
R
dt
L0
Джере
ло
струму
i(t)
L
C
R
де u – напруга
i – струм
R –активний опір
C – ємність
L – індуктивність
u (t ) K 2e
2 t
sin( 2t 2 )
84.
Методи опису САКОпераційна форма рівнянь САК
Пряме перетворення Лапласа
Для функцій, що відповідають умові
при t 0
0
f (t )
0 при t 0
можливо перетворення Лапласа
F ( s) f (t ) e
s t
dt ,
0
або в символічному записі
F(s) f(t).
s 0 j
85.
Методи опису САКОпераційна форма рівнянь САК
Зворотне перетворення Лапласа
0 j
1
st
x(t )
F
(
s
)
e
ds
2 j 0 j
n
F1 (s)
F ( s)
F2 (s)
F1 (sk ) sk t
f (t )
e
k 1 F2 ( s k )
F1 (s)
F ( s)
sF2 (s)
F1 (0) n F1 ( s k ) sk t
f (t )
e
F2 (0) k 2 F2 ( s k )
86.
Методи опису САКОпераційна форма рівнянь САК
Передавальна функція системи
автоматичного
регулювання
–
це
відношення вихідної величини динамічної
системи до вхідної, записаних у операційній
формі при нульових початкових умовах:
X вих ( s)
W ( s)
X в х ( s)
87.
Методи опису САКЛанка
САК
- елемент САК, що
розглядається з точки зору його динамічних
властивостей і відбиває фізичні властивості
реальних
органів
перетворювати
або
передавати в прямому напрямку сигнал.
88.
Методи опису САКПропорційна ланка
Пропорційною називають ланку, в якій в
кожний момент часу існує пропорційність
між вихідною та вхідною величинами:
хвих(t)=kхвх(t)
де k - коефіцієнт пропорційності (підсилення)
Передавальна функція пропорційної ланки:
W (s) k
89.
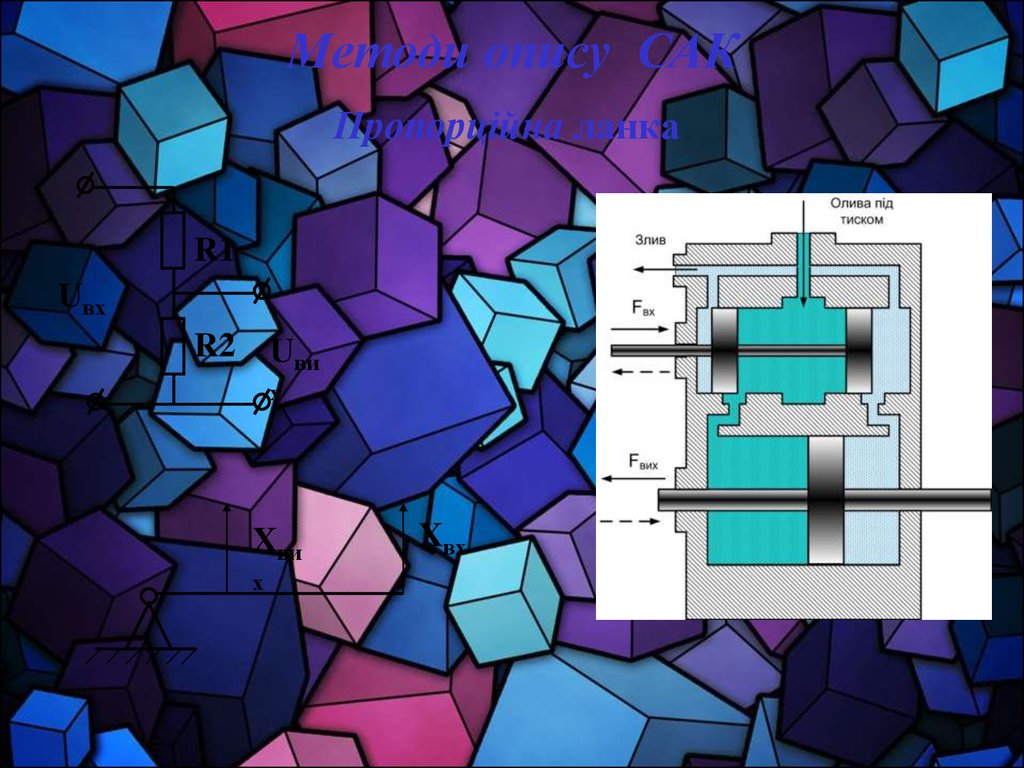
Методи опису САКПропорційна ланка
R1
Uвх
R2 Uви
х
Xви
х
Xвх
90.
Методи опису САКАперіодична ланка
Аперіодичною (інерційною) називають ланку,
в якій при подачі на вхід ступінчастої дії
вихідна величина аперіодично прямує до
нового усталеного значення. Передавальна
функція аперіодичної ланки:
k
W ( s)
Ts 1
де:
Т - постійна часу
k - коефіцієнт передачі
91.
Методи опису САКАперіодична ланка
R1
Uвх
T C
С1
Uви
х
V
92.
Методи опису САКАперіодична ланка
Диференціальне рівняння:
dxâèõ (t )
T
xâèõ (t ) kxâõ (t )
dt
4.5
4.5
4
3.5
3
2.5
Y( t )
t
T
xâèõ (t ) k xâõ(t ) (1 e )
2
1.5
1
0.5
0
0
0
0
1
2
3
t
4
5
5
93.
Методи опису САККоливальна ланка
Коливальною називають ланку, в якій при
одержанні на вході ступінчастої дії вихідна
величина прямує до нового сталого значення,
здійснюючі
згасаючі
коливання.
Передавальна функція коливальної ланки:
де:
k
W (s) 2 2
T s 2 Ts 1
Т - постійна часу
k - коефіцієнт передачі
- коефіцієнт коливальності
94.
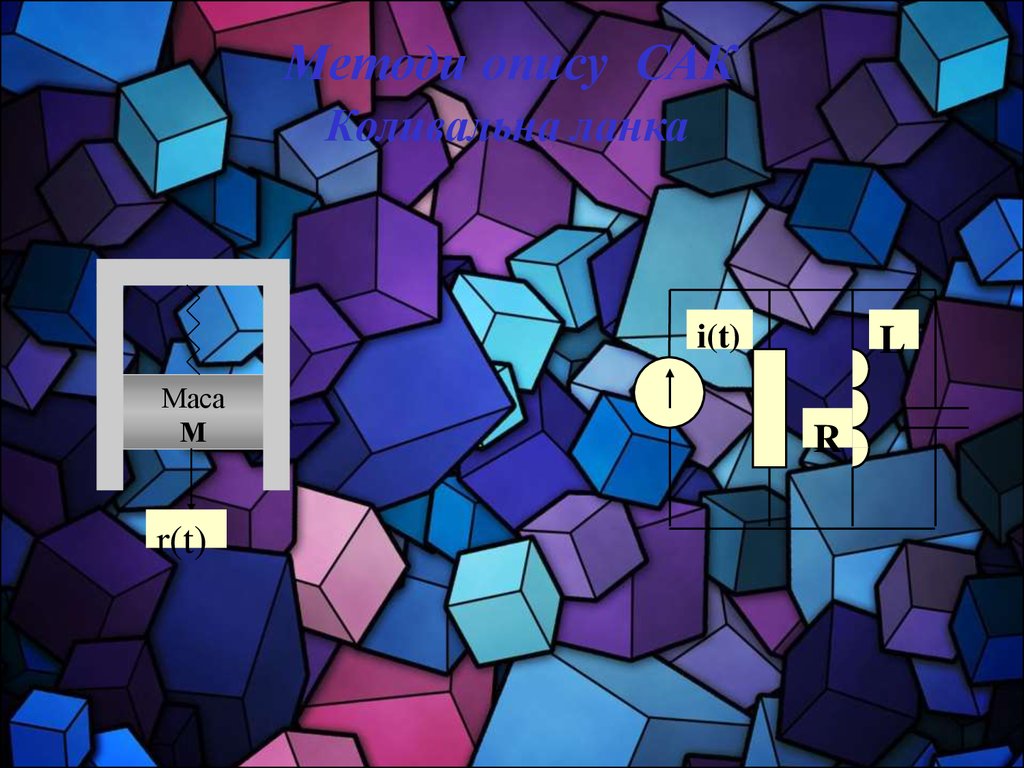
Методи опису САККоливальна ланка
i(t)
Маса
М
r(t)
L
R
95.
Методи опису САККоливальна ланка
Диференціальне рівняння:
2
d
xâèõ (t )
dxâèõ (t )
2
T
2 T
xâèõ (t ) kxâõ (t )
2
dt
dt
7
6
5
4
Y( t )
3
2
xâèõ (t ) k{1 e
1
0
0
1
t
T
1 2
1 2
[cos(
t)
sin(
t )]}
T
T
1
2
3
t
4
5
96.
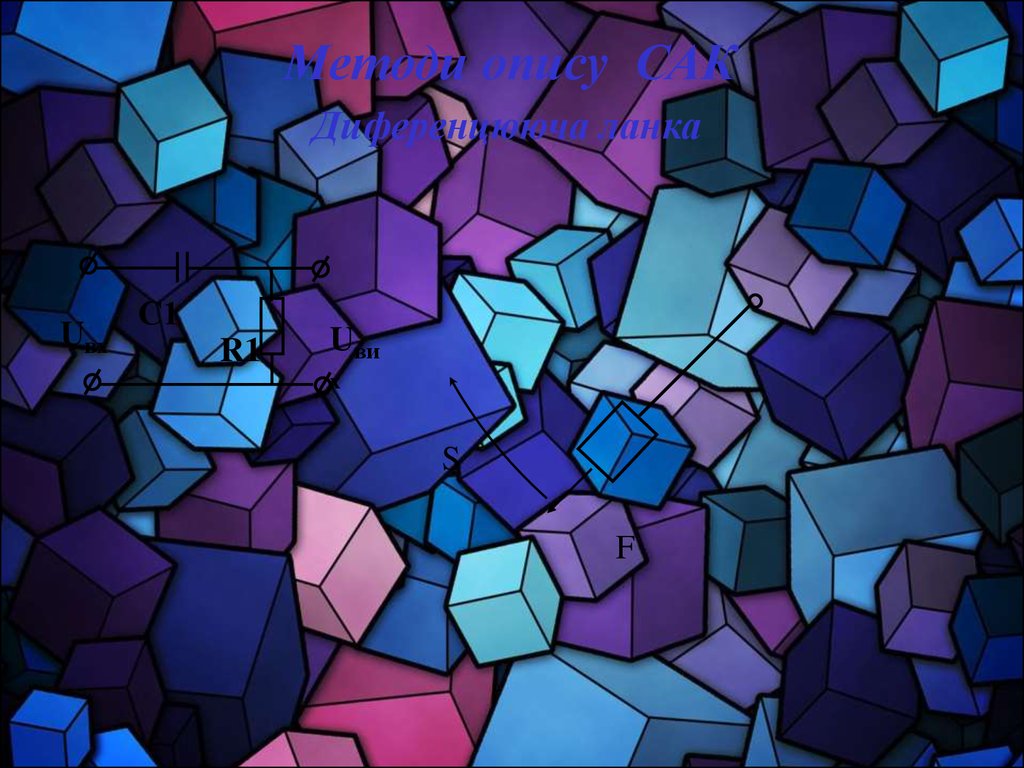
Методи опису САКДиференцююча ланка
Диференцюючею називають ланку, в якій
вихідна величина пропорційна швидкості
зміни вхідної.
Передавальна
функція
диференцюючої
ланки:
W ( s) k s
97.
Методи опису САКДиференцююча ланка
Uвх
С1
R1
Uви
х
S
F
98.
Передавальнафункція
Структурні
схемисхеми
САР САР
Вузол
Суматор
W1(s)
m 1
W2(s)
Y (s) b0 s b1 s ... bm 1 s bm
Wåêâ (s)
n
n 1
X (s) a0 s a1 s ... an 1 s an
m
W3(s)
Зв'язок
Ланка
99.
Основні задачі, що вирішуються приавтоматизації зварювальних процесів
МЕТОЮ АВТОМАТИЗАЦІЇ
ЗВАРЮВАЛЬНИХ ПРОЦЕСІВ Є
ОДЕРЖАННЯ ЗВАРНИХ З’ЄДНАНЬ З
НЕОБХІДНИМИ ВЛАСТИВОСТЯМИ ПРИ
НАЙВИЩИХ ТЕХНІКО-ЕКОНОМІЧНИХ
ПОКАЗНИКАХ БЕЗ БЕЗПОСЕРЕДНЬОЇ
УЧАСТІ ЛЮДИНИ.
100.
Мета і завдання автоматизаціїзварювальних процесів
Забезпечення заданої якості
зварних з’єднань і її стабілізація в
межах усієї партії однотипних
виробів
101.
Мета і завдання автоматизаціїзварювальних процесів
Впровадження у виробництво
високоефективних технологічних
процесів зварювання, керувати
якими людина неспроможна
фізіологічно
102.
Мета і завдання автоматизаціїзварювальних процесів
Підвищення продуктивності
зварювальних робіт, економія
робочого часу, трудових,
енергетичних і матеріальних
ресурсів
103.
Мета і завдання автоматизаціїзварювальних процесів
Звільнення людини від
безпосереднього виконання функцій
керування зварювальними процесами
104.
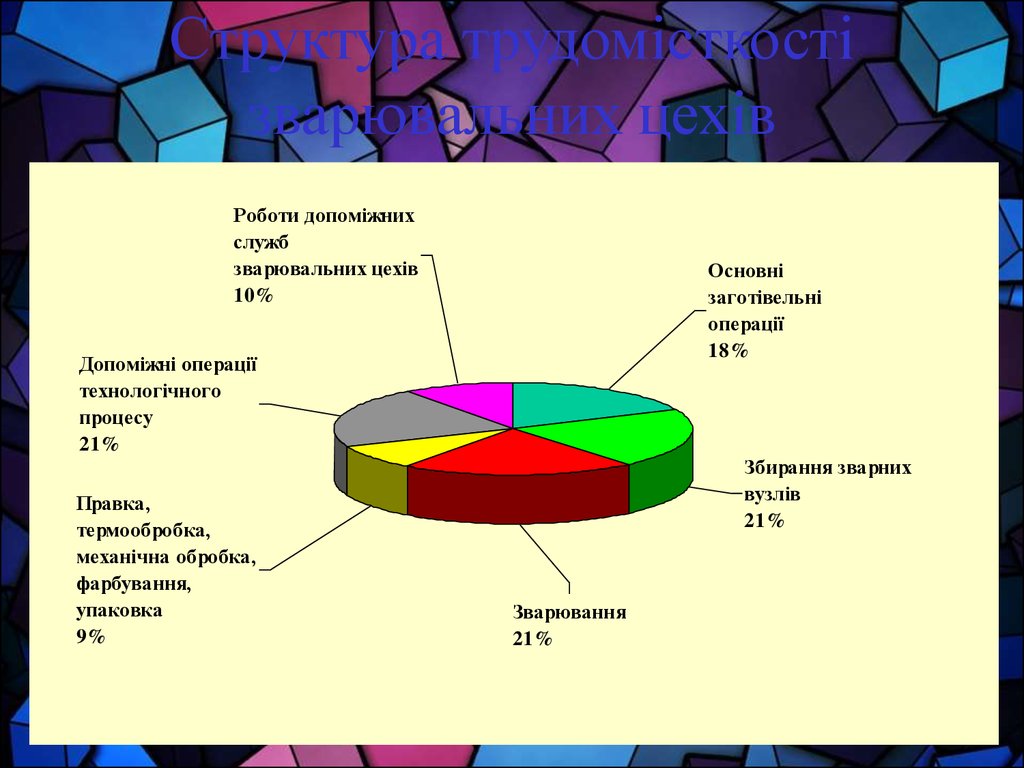
Структура трудомісткостізварювальних цехів
Роботи допоміжних
служб
зварювальних цехів
10%
Основні
заготівельні
операції
18%
Допоміжні операції
технологічного
процесу
21%
Правка,
термообробка,
механічна обробка,
фарбування,
упаковка
9%
Збирання зварних
вузлів
21%
Зварювання
21%
105. ОБ’ЄКТИ АВТОМАТИЧНОГО КЕРУВАННЯ ПРИ ЗВАРЮВАННІ
Об'єкт автоматичного керування призварюванні — процес формування зварного
з'єднання.
106. ОБ’ЄКТИ АВТОМАТИЧНОГО КЕРУВАННЯ ПРИ ЗВАРЮВАННІ
Джерелоенергії
Трансформатор
енергії
Джерело
нагріву
Виріб
107.
Узагальнена функціональна схема ТПЗПараметри
з'єднання
Виріб
Збурення
Джерело
нагріву
Збурення
Трансформат
ор енергії
Збурення
Параметри
режиму
Збурення
Пристрої дозування
тепла
108. ОБ’ЄКТИ АВТОМАТИЧНОГО КЕРУВАННЯ
Енергетичні параметрихарактеризують внесок енергії в
процес утворення зварного
з'єднання
109. ОБ’ЄКТИ АВТОМАТИЧНОГО КЕРУВАННЯ
Кінематичні і геометричніпараметри характеризують
просторове переміщення або
положення джерела нагрівання
відносно виробу
110. ОБ’ЄКТИ АВТОМАТИЧНОГО КЕРУВАННЯ
Технологічні параметрихарактеризують умови формування
і кристалізації зварних швів,
перенесення електродного металу
111. ОБ’ЄКТИ АВТОМАТИЧНОГО КЕРУВАННЯ
Джерелами енергетичних ікінематичних збурень є промислова
мережа і власне зварювальне
устаткування: джерела живлення,
апаратура керування, приводи
подавання електрода, переміщення та
інше
112. ОБ’ЄКТИ АВТОМАТИЧНОГО КЕРУВАННЯ
Джерелами технологічнихзбурень є недосконалість технології
підготовки заготівок та їх
складання, технологія зварювання,
зовнішні впливи
113. ОБ’ЄКТИ АВТОМАТИЧНОГО КЕРУВАННЯ
ВХІДНІ ПАРАМЕТРИ ПРОЦЕСУ ЗВАРЮВАННЯПараметри режиму
Збурення
ЕНЕРГЕТИЧНІ
Напруга, струм, питома потужність джерела
нагрівання; температура виробу; зусилля
осадки; тривалість окремих операцій процесу
та ін.
Коливання напруги в мережі; зусилля на
електродах; зміни опору зварювального кола;
умов
підведення,
відведення
тепла;
нестабільність тривалості окремих операцій
зварювального процесу та ін.
КІНЕМАТИЧНІ та ГЕОМЕТРИЧНІ
Швидкість подавання електрода; швидкість
оплавлення і осадки; амплітуда і частота
поперечних коливань електрода; швидкість
переміщення виробу відносно джерела
нагрівання; виліт і кут нахилу електрода та ін.
Відхилення електроду від осі стику; "магнітне
дуття",
коливання
довжини
дуги;
нестабільність
швидкостей
подавання
електрода та зварювання; зміни вильоту
електрода та ін.
ТЕХНОЛОГІЧНІ
Діаметр електрода; форма і розміри
підготовки
кромок;
проміжок
між
зварюваними деталями; виліт і кут нахилу
електрода; розташування шва у просторі;
спосіб захисту розплавленого металу та ін.
Зміна проміжку в стику; перевищення кромок;
шунтування
зварювального
струму
за
точкового
зварювання;
нестабільність
контактних опорів та ін.