

 industry
industrySimilar presentations:







")


Выбор и моделирование двигателя постоянного тока для скоростного следящего электропривода
1.
Лабораторная работа 1ВЫБОР И МОДЕЛИРОВАНИЕ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
ДЛЯ СКОРОСТНОГО СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА
2.
Выбор и расчёт электродвигателяВ качестве электромеханического преобразователя силового канала следящего
скоростного ЭП применен ЭД постоянного тока с управлением по цепи якоря. К
достоинствам ЭД постоянного тока следует отнести большой диапазон мощностей,
линейность регулировочных и механических характеристик. Основным недостатком ЭД
постоянного тока является наличие щеточно-коллекторного узла, создающего
дополнительный момент трения и снижающего надежность его работы.
Анализ технических данных показывает, что ЭД различных типов с равными значениями
номинальной мощности РНОМ имеют различные значения частоты вращения nНОМ,
напряжения питания UНОМ, тока якоря IЯ, сопротивления обмотки якоря RЯ, номинального
момента МНОМ и момента инерции JДВ. Поэтому при выборе ЭД необходимо принимать
инженерные решения, исходя из условий эксплуатации и технической целесообразности.
Так, например, для обеспечения конструктивных требований необходимо выбирать
быстроходные ЭД с малым значением момента инерции JДВ, несмотря на увеличение
передаточного числа редуктора. Вместе с тем, для выполнения требований по моменту
необходимо выбирать менее быстроходный ЭД (с большими габаритами и массой) с
большим значением номинального момента МНОМ.
3.
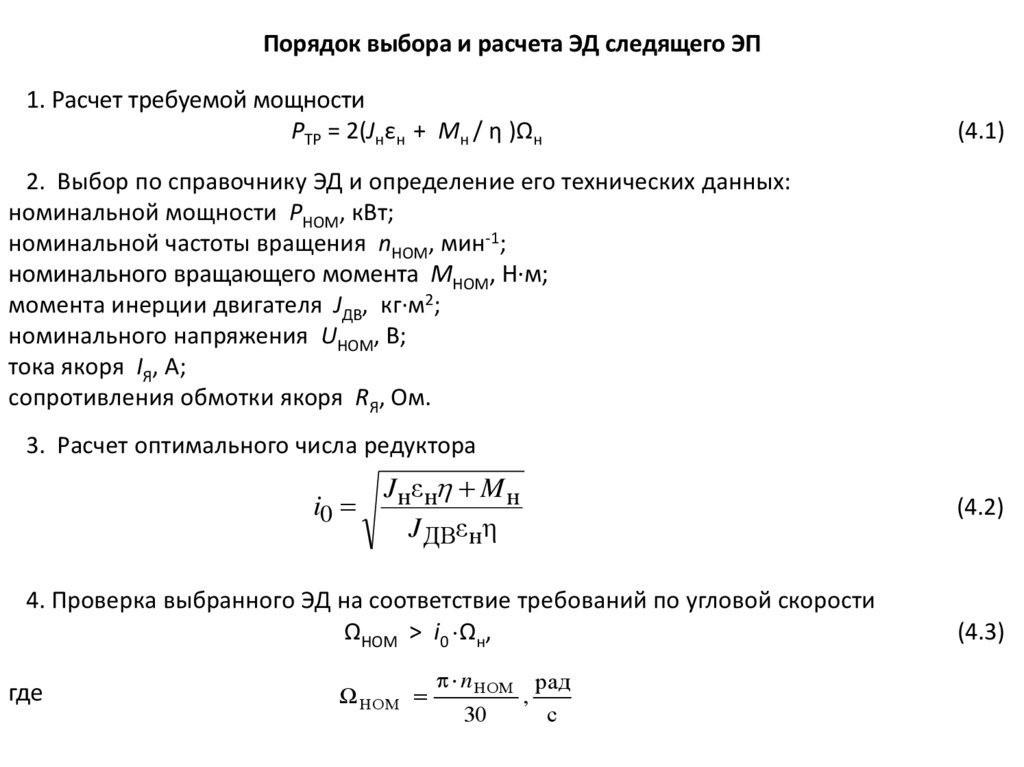
Порядок выбора и расчета ЭД следящего ЭП1. Расчет требуемой мощности
РТР = 2(Jнεн + Мн / η )Ωн
(4.1)
2. Выбор по справочнику ЭД и определение его технических данных:
номинальной мощности РНОМ, кВт;
номинальной частоты вращения nНОМ, мин-1;
номинального вращающего момента МНОМ, Н∙м;
момента инерции двигателя JДВ, кг∙м2;
номинального напряжения UНОМ, В;
тока якоря IЯ, А;
сопротивления обмотки якоря RЯ, Ом.
3. Расчет оптимального числа редуктора
i0
J нεн M н
J ДВεнη
4. Проверка выбранного ЭД на соответствие требований по угловой скорости
ΩНОМ > i0 Ωн,
где
Ω НОМ
n НОМ рад
,
30
с
(4.2)
(4.3)
4.
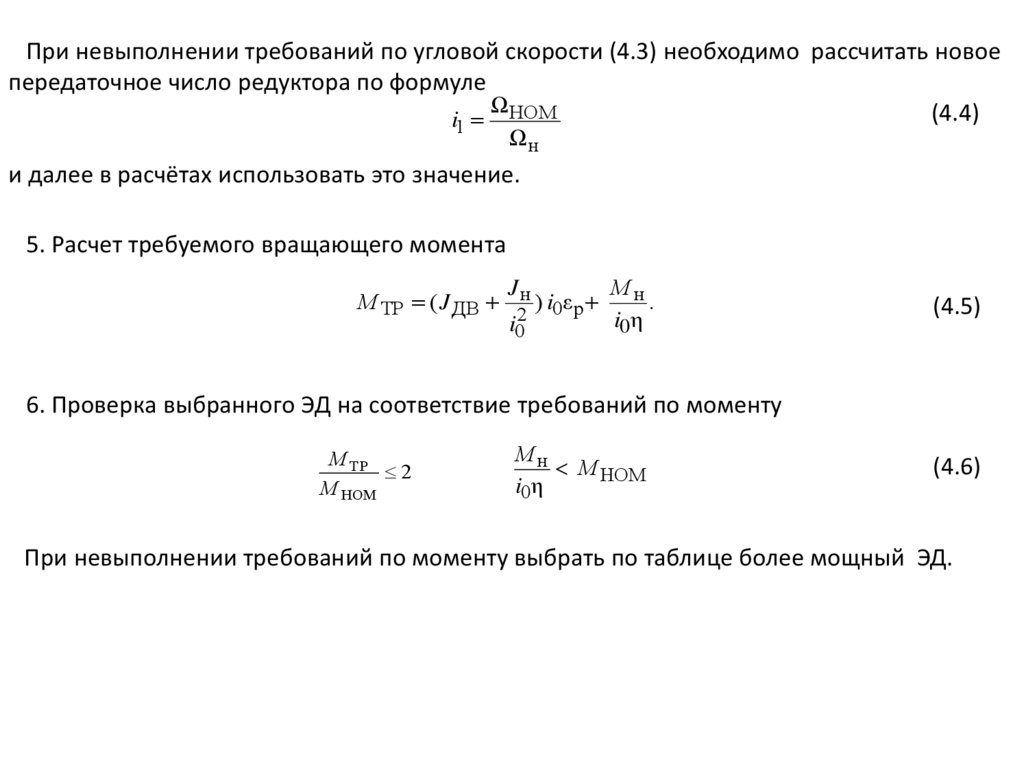
При невыполнении требований по угловой скорости (4.3) необходимо рассчитать новоепередаточное число редуктора по формуле
Ω
(4.4)
i1 НОМ
Ωн
и далее в расчётах использовать это значение.
5. Расчет требуемого вращающего момента
J
Мн
М ТР ( J ДВ н ) i0ε р
.
2
i
η
i0
0
(4.5)
6. Проверка выбранного ЭД на соответствие требований по моменту
М ТР
2
М НОМ
Мн
М НОМ
i0η
(4.6)
При невыполнении требований по моменту выбрать по таблице более мощный ЭД.
5.
Расчет параметров динамической модели электродвигателя1. Определение коэффициента противо-ЭДС КЕ, В∙с/рад
КЕ
U НОМ I Я RЯ
Ω НОМ
(4.7)
2. Определение коэффициента момента КМ, Н∙ м/А
КМ
М НОМ
IЯ
3. Определение электромеханической постоянной времени ЭД ТМ, с
J
( J ДВ н ) RЯ
i02
ТМ
КE КМ
(4.8)
(4.9)
4. Определение электромагнитной постоянной времени ЭД ТЭ, с
Т Э
LЯ
RЯ
(4.10)
6.
Исходные данныеΩн = 50 град/с;
εн = 10 град/с2;
Jн = 50 кг∙м2
Мн = 180 Н∙ м.
η 0,9.
7.
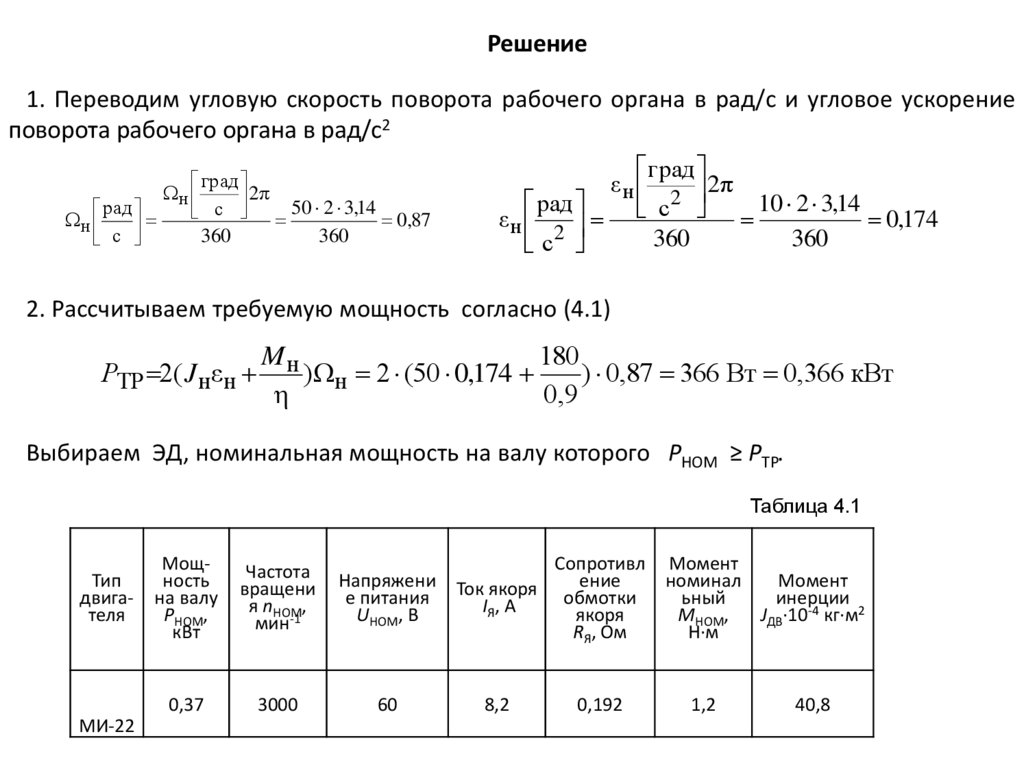
Решение1. Переводим угловую скорость поворота рабочего органа в рад/с и угловое ускорение
поворота рабочего органа в рад/с2
град
н
2π
50 2 3,14
с
рад
н
0,87
360
360
с
град
εн
2π
2
рад
с 10 2 3,14 0,174
εн
360
360
с2
2. Рассчитываем требуемую мощность согласно (4.1)
РТР 2( J нεн
Mн
180
)Ωн 2 (50 0,174
) 0,87 366 Вт 0,366 кВт
η
0,9
Выбираем ЭД, номинальная мощность на валу которого РНОМ ≥ РТР.
Таблица 4.1
Тип
двигателя
МИ-22
Мощность
на валу
РНОМ,
кВт
Частота
вращени
я nНОМ,
мин-1
Напряжени
е питания
UНОМ, В
0,37
3000
60
Сопротивл Момент
ение
номинал
Момент
Ток якоря обмотки
ьный
инерции
IЯ, А
якоря
МНОМ,
JДВ∙10-4 кг∙м2
RЯ, Ом
Н∙м
8,2
0,192
1,2
40,8
8.
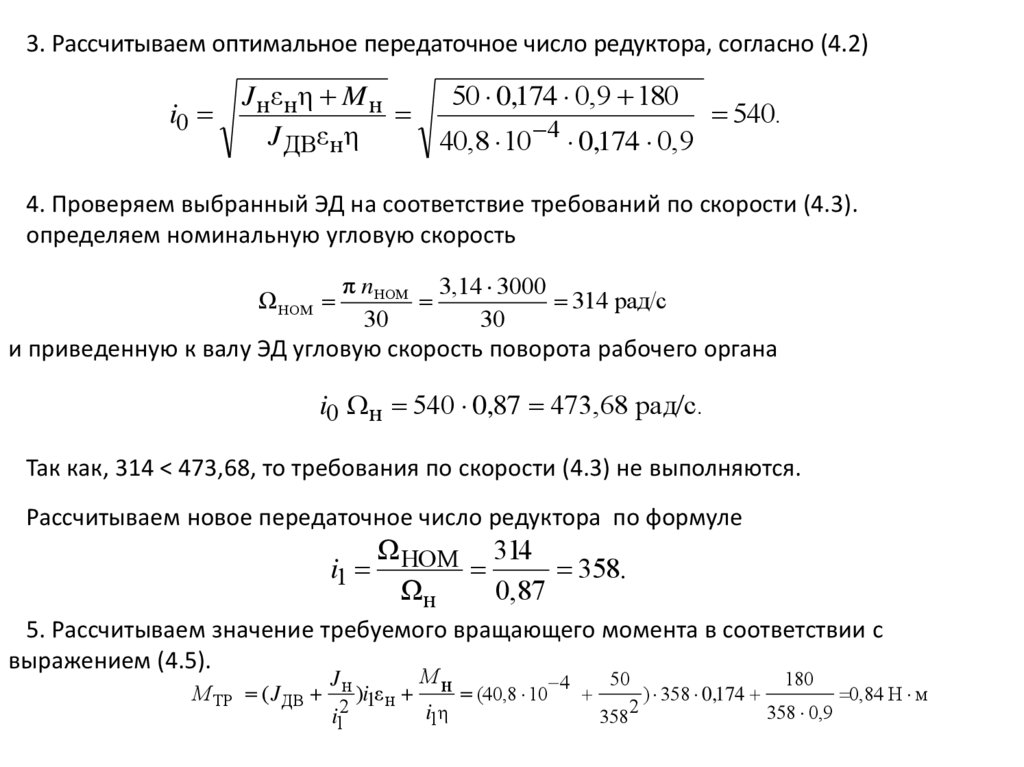
3. Рассчитываем оптимальное передаточное число редуктора, согласно (4.2)i0
J нε н η M н
50 0,174 0,9 180
540.
4
J ДВε нη
40,8 10 0,174 0,9
4. Проверяем выбранный ЭД на соответствие требований по скорости (4.3).
определяем номинальную угловую скорость
Ω НОМ
π nНОМ 3,14 3000
314 рад/с
30
30
и приведенную к валу ЭД угловую скорость поворота рабочего органа
i0 Ωн 540 0,87 473,68 рад/с.
Так как, 314 < 473,68, то требования по скорости (4.3) не выполняются.
Рассчитываем новое передаточное число редуктора по формуле
i1
Ω НОМ 314
358.
Ωн
0,87
5. Рассчитываем значение требуемого вращающего момента в соответствии с
выражением (4.5).
М
J
50
180
4
М ТР ( J ДВ н )i1ε н н (40,8 10
) 358 0,174
0,84 Н м
2
2
i1η
358 0,9
i1
358
9.
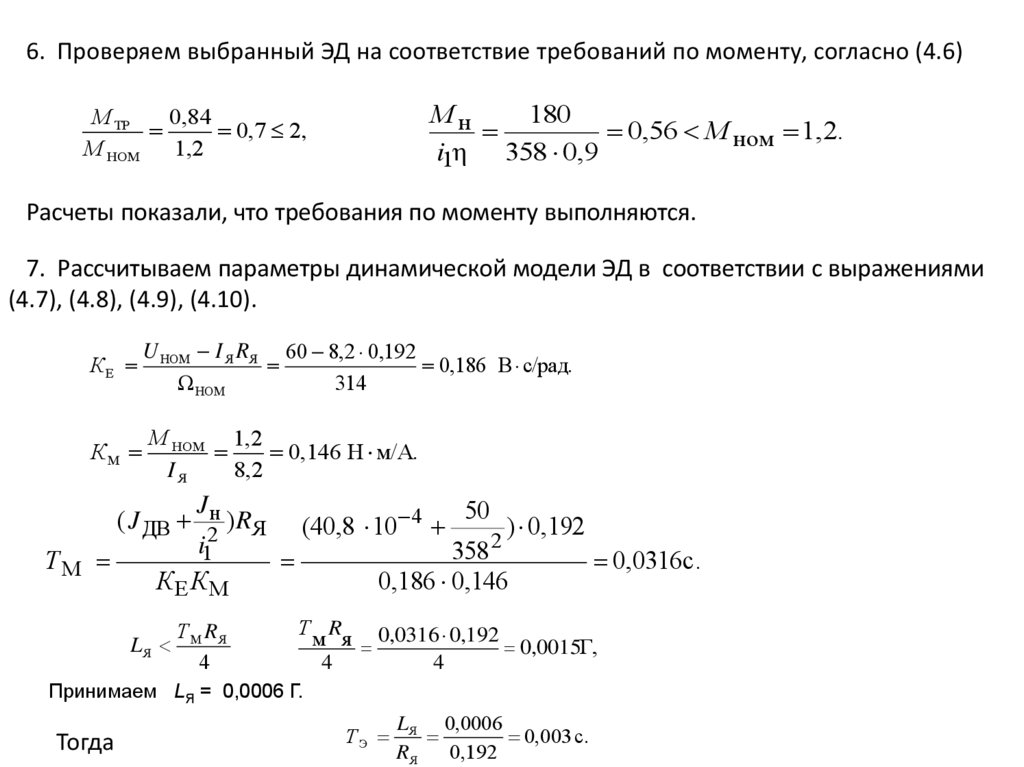
6. Проверяем выбранный ЭД на соответствие требований по моменту, согласно (4.6)Мн
180
0,56 М ном 1,2.
i1η 358 0,9
М ТР
0,84
0,7 2,
М НОМ
1,2
Расчеты показали, что требования по моменту выполняются.
7. Рассчитываем параметры динамической модели ЭД в соответствии с выражениями
(4.7), (4.8), (4.9), (4.10).
КЕ
КМ
U НОМ I Я RЯ 60 8,2 0,192
0,186 В с/рад.
Ω НОМ
314
М НОМ 1,2
0,146 Н м/А.
IЯ
8,2
J
( J ДВ н ) RЯ (40,8 10 4 50 ) 0,192
2
i12
358
ТМ
0,0316с.
КЕ КМ
0,186 0,146
Т R
м я 0,0316 0,192 0,0015Г,
4
4
Принимаем LЯ = 0,0006 Г.
LЯ
Тогда
Т М RЯ
4
ТЭ
LЯ 0,0006
0,003 с.
RЯ
0,192
10.
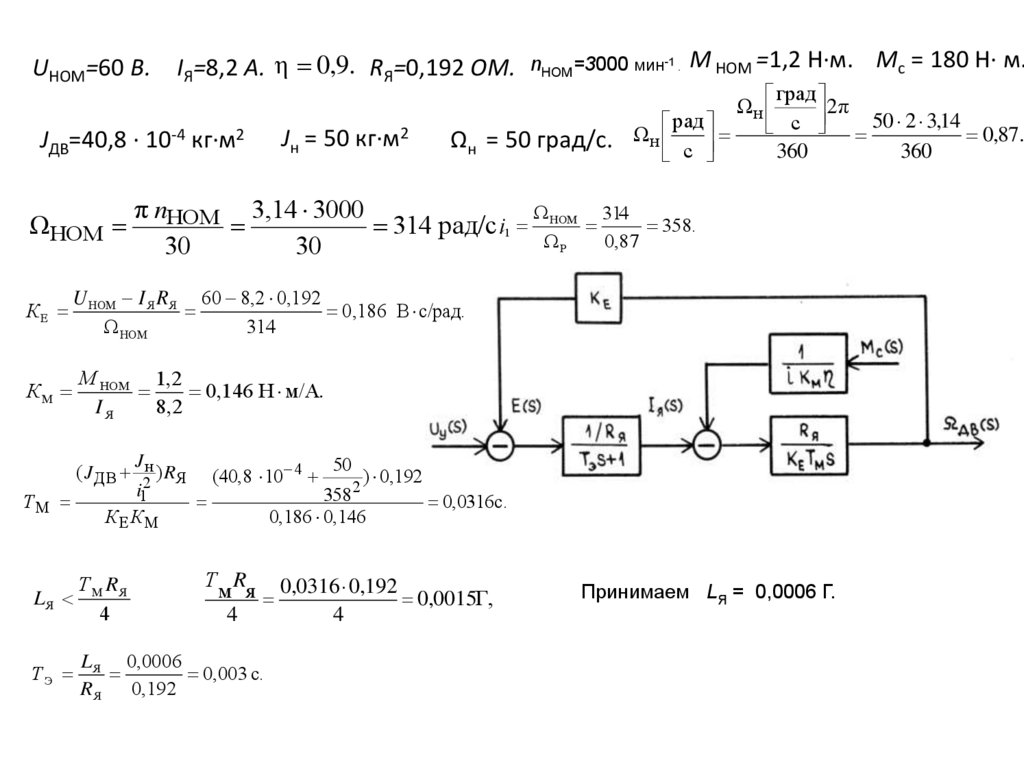
UНОМ=60 В.IЯ=8,2 А. η 0,9. RЯ=0,192 ОМ.
JДВ=40,8 ∙ 10-4 кг∙м2
ΩНОМ
КЕ
Jн = 50 кг∙м2
nНОМ=3000 мин-1 .
Ωн = 50 град/с.
π nНОМ 3,14 3000
Ω
314 рад/с.i1 НОМ
ΩР
30
30
М НОМ =1,2 Н∙м. Мc = 180 Н∙ м.
град
Ωн
2π
50 2 3,14
с
рад
Ωн
0,87.
360
360
с
314
358.
0,87
U НОМ I Я RЯ 60 8,2 0,192
0,186 В с/рад.
Ω НОМ
314
КМ
М НОМ 1,2
0,146 Н м/А.
IЯ
8,2
J
( J ДВ н ) RЯ (40,8 10 4 50 ) 0,192
i12
358 2
ТМ
0,0316с.
КЕ КМ
0,186 0,146
Т R
м я 0,0316 0,192 0,0015Г,
4
4
LЯ
Т М RЯ
4
ТЭ
LЯ 0,0006
0,003 с.
RЯ
0,192
Принимаем LЯ = 0,0006 Г.
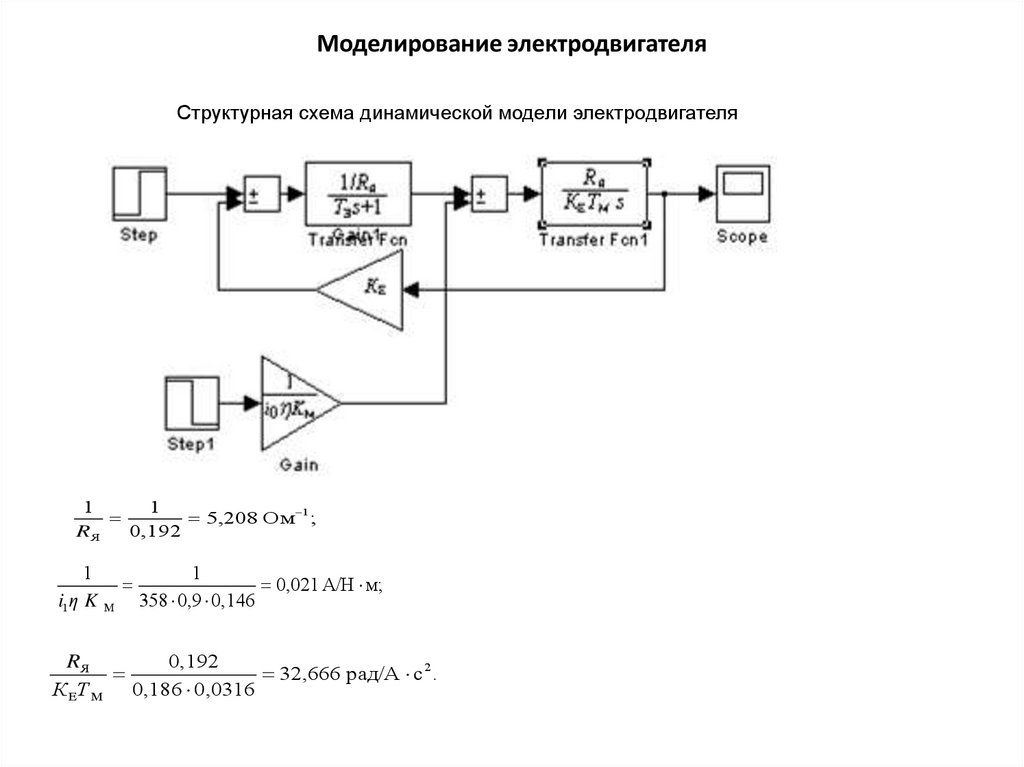
11.
Моделирование электродвигателяСтруктурная схема динамической модели электродвигателя
1
1
5,208 Ом 1 ;
RЯ
0,192
1
i1η K
М
1
0,021 А/Н м;
358 0,9 0,146
RЯ
0,192
32,666 рад/А с 2 .
К ЕТ М 0,186 0,0316
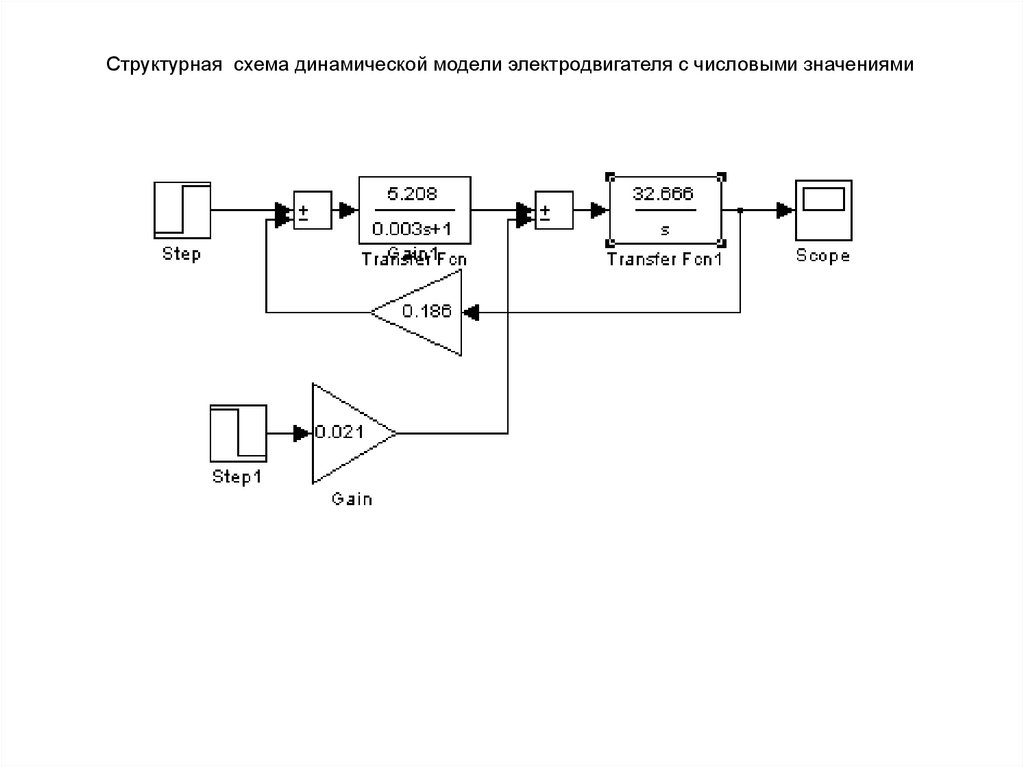
12.
Структурная схема динамической модели электродвигателя с числовыми значениями13.
Переходная характеристика двигателя по управляющему воздействиюΩ уст
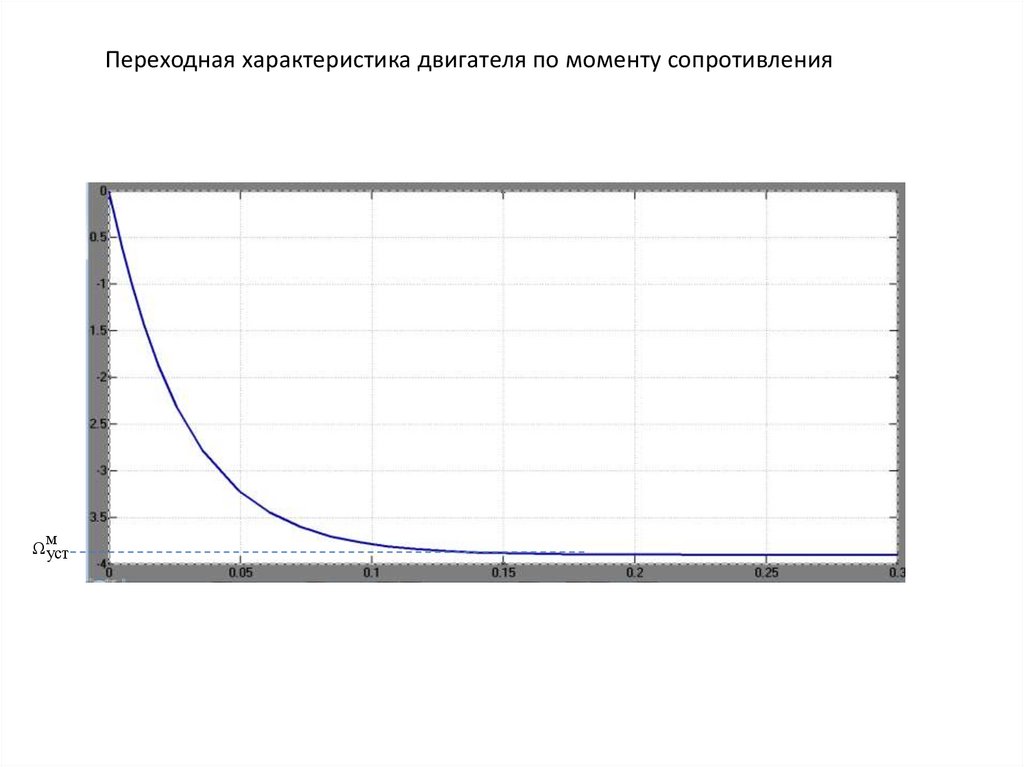
14.
Переходная характеристика двигателя по моменту сопротивлениям
Ω уст
15.
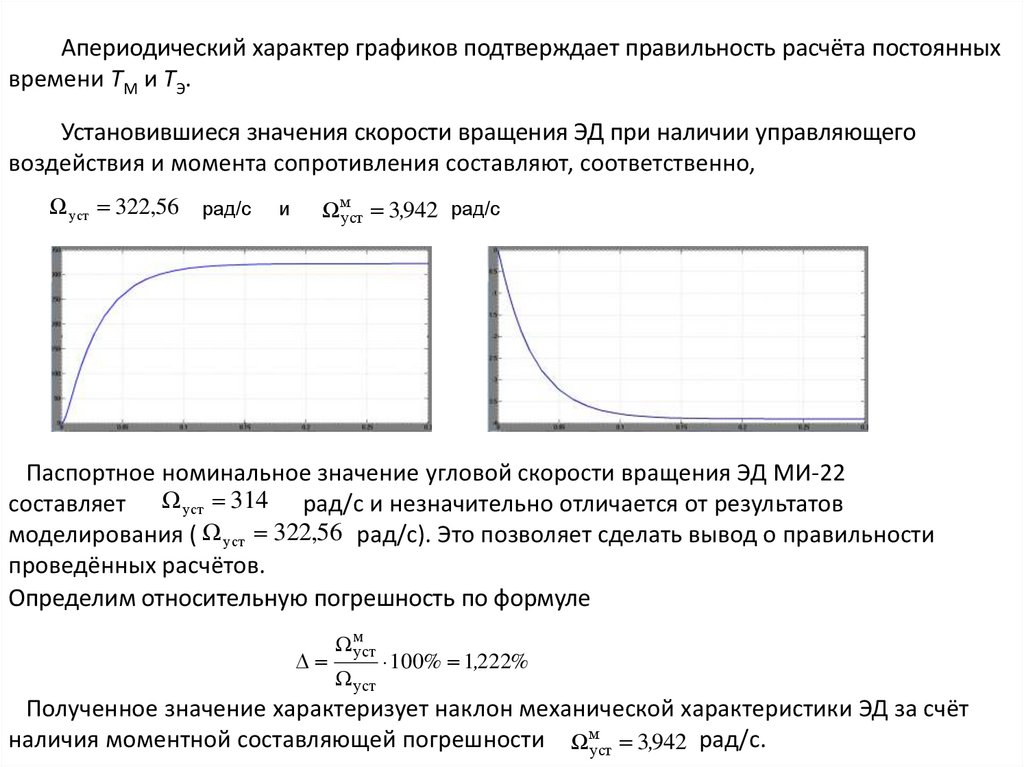
Апериодический характер графиков подтверждает правильность расчёта постоянныхвремени ТМ и ТЭ.
Установившиеся значения скорости вращения ЭД при наличии управляющего
воздействия и момента сопротивления составляют, соответственно,
Ω уст 322,56 рад/с
и
Ωмуст 3,942 рад/с
Паспортное номинальное значение угловой скорости вращения ЭД МИ-22
составляет Ω уст 314 рад/с и незначительно отличается от результатов
моделирования ( Ω уст 322,56 рад/с). Это позволяет сделать вывод о правильности
проведённых расчётов.
Определим относительную погрешность по формуле
Ω муст
Ω уст
100% 1,222%
Полученное значение характеризует наклон механической характеристики ЭД за счёт
наличия моментной составляющей погрешности Ωмуст 3,942 рад/с.
16.
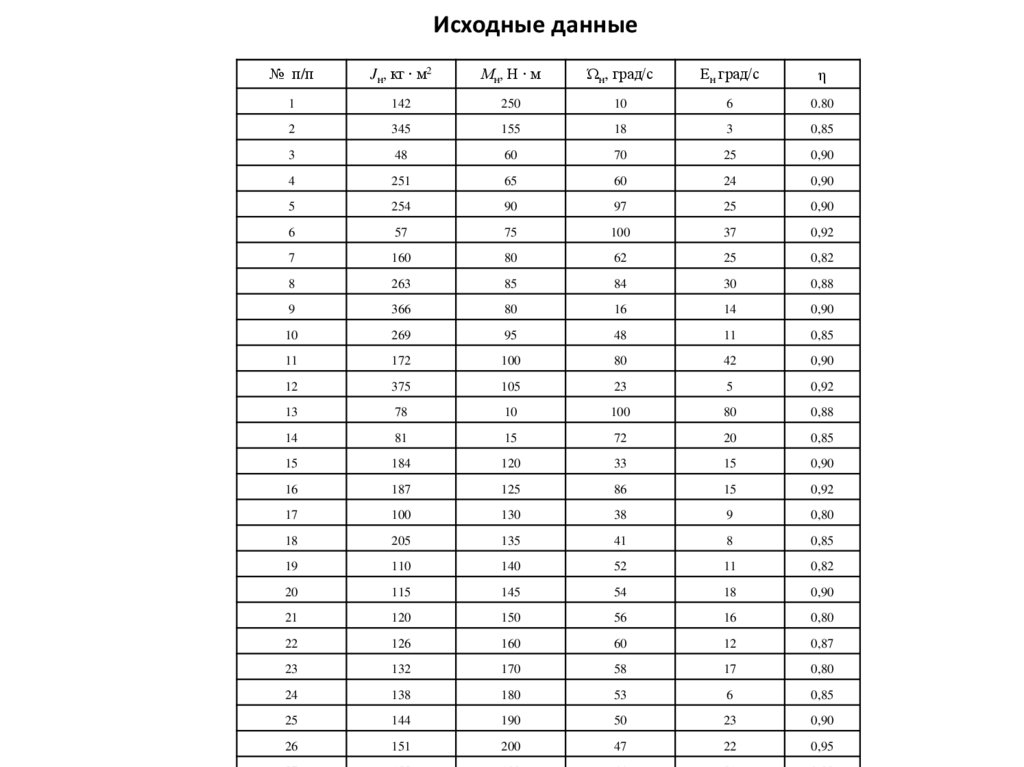
Исходные данные№ п/п
Jн, кг ∙ м2
Мн, Н ∙ м
Ώн, град/с
Εн град/с
η
1
142
250
10
6
0.80
2
345
155
18
3
0,85
3
48
60
70
25
0,90
4
251
65
60
24
0,90
5
254
90
97
25
0,90
6
57
75
100
37
0,92
7
160
80
62
25
0,82
8
263
85
84
30
0,88
9
366
80
16
14
0,90
10
269
95
48
11
0,85
11
172
100
80
42
0,90
12
375
105
23
5
0,92
13
78
10
100
80
0,88
14
81
15
72
20
0,85
15
184
120
33
15
0,90
16
187
125
86
15
0,92
17
100
130
38
9
0,80
18
205
135
41
8
0,85
19
110
140
52
11
0,82
20
115
145
54
18
0,90
21
120
150
56
16
0,80
22
126
160
60
12
0,87
23
132
170
58
17
0,80
24
138
180
53
6
0,85
25
144
190
50
23
0,90
26
151
200
47
22
0,95