


 industry
industrySimilar presentations:









")
Система стабилизации и ориентации спутников не требующая разгрузки
1.
Система стабилизации иориентации спутников не
требующая разгрузки
Санкт-Петербург
2021
2.
ОпределенияКубсат (англ. CubeSat) — формат малых (сверхмалых) искусственных спутников Земли для
исследования космоса, имеющих габариты 10х10х10 см при массе не более 1,33 кг.
Спецификации CubeSat были разработаны в 1999 году Калифорнийским политехническим и
Стэнфордским университетами, чтобы упростить создание сверхмалых спутников.
Система ориентации космического аппарата — одна из бортовых систем космического
аппарата, обеспечивающая определённое положение осей аппарата относительно
некоторых заданных направлений. Необходимость данной системы обусловлена
следующими задачами:
- ориентирование солнечных батарей на Солнце;
- для навигационных измерений;
- для проведения различных исследований;
- при передаче информации с помощью остронаправленной антенны;
- перед включением тормозного или разгонного двигателя с целью изменения траектории
полёта.
Разгрузка — процесс приведения исполнительных механизмов системы ориентации
(гиродинов, маховиков), достигших насыщения, в исходное состояние. Производится,
обычно, при помощи вспомогательных реактивных двигателей.
3.
Типы систем ориентации и стабилизацииЗадачи, выполняемые аппаратом, могут требовать как постоянной ориентации, так и
кратковременной. Системы ориентации делятся на активные и пассивные.
К активным системам относят: реактивные двигатели ориентации, гиродины, маховики,
соленоиды и т. д., они требуют затрат энергии, запасаемой на борту аппарата.
Системы ориентации, не требующие затрат энергии, называют пассивными, к ним
относятся: гравитационная, инерционная, аэродинамическая и др. Недостаток пассивных
систем заключается в том, что они создают очень малый момент и, как следствие, результат
достигается за очень большое время (до недель), поэтому в дальнейшем рассматриваются
только активные системы.
4.
Реактивные двигателиГазовые сопла или микроракетные двигатели малой тяги способны создавать большие
управляющие усилия и таким образом парировать практически любые возмущения. Это
свойство сделало этот способ управления ориентацией аппарата весьма распространённым
как в задачах активной ориентации, так и стабилизации. Для создания тяги может быть
использована энергия сжатого газа (обычно азот или гелий), разложения вещества, горения
жидкого или твёрдого топлива.
Недостаток данных систем – необходимость иметь (и пополнять) запас топлива, что
применительно к кубсатам нереально.
5.
ГироскопыДля ориентации и стабилизации массивных космических аппаратов на стационарных
орбитах используются инерционные маховики и гиродины. Вращение маховика обычно
обеспечивается электродвигателем. Система на базе инерционных маховиков особенно
эффективна при знакопеременных возмущениях, если же возмущения однонаправлены, то
через некоторое время достигается предел управляемости и необходимо вмешательство с
помощью какой-либо ещё системы стабилизации, например, включение ракетного
двигателя («разгрузка»), что является большим недостатком подобных систем.
Применительно к кубсатам, разгрузка гиродинов или маховиков невозможна из-за
отсутствия на борту возобновляемого запаса топлива для реактивных двигателей.
6.
Система стабилизации и ориентации кубсатовЗАДАЧА ПРОЕКТА:
Создание системы, позволяющей, за короткое время (секунды) ориентировать объекты в нужном
направлении по трём осям как в кратковременном, так и в непрерывном режиме и не требующей
«разгрузки». Данная система особенно может быть востребована кубсатами, так как проблема
ориентации стоит остро, а их физические возможности малы.
ПРИНЦИП ДЕЙСТВИЯ:
Система представляет собой электромеханическое устройство, по сложности схожа с гиродинами
и мотор-маховиками, однако применение многофазного метода дало возможность уйти от их
недостатков, связанных с наличием высокооборотных маховиков и ограниченным временем
непрерывного действия. Управляется микроконтроллером.
ВОЗМОЖНОСТИ СИСТЕМЫ::
-
Создание вращательного момента по любой из трёх осей или одновременно по нескольким.
Для работы системы не требуется реакция окружающей среды (воды, воздуха), возможно
исполнение в герметичном корпусе без внешних элементов.
Система может создавать как кратковременный так и непрерывный вращательный момент,
по времени ограниченный источником питания и не требующий «разгрузки».
Система может использоваться для стабилизации и ориентации не только кубсатов, но и
других объектов – подводных аппаратов, аэростатов и т.д.
При увеличении массогабаритных параметров возможно усиление вращательного момента
для управления крупными объектами.
7.
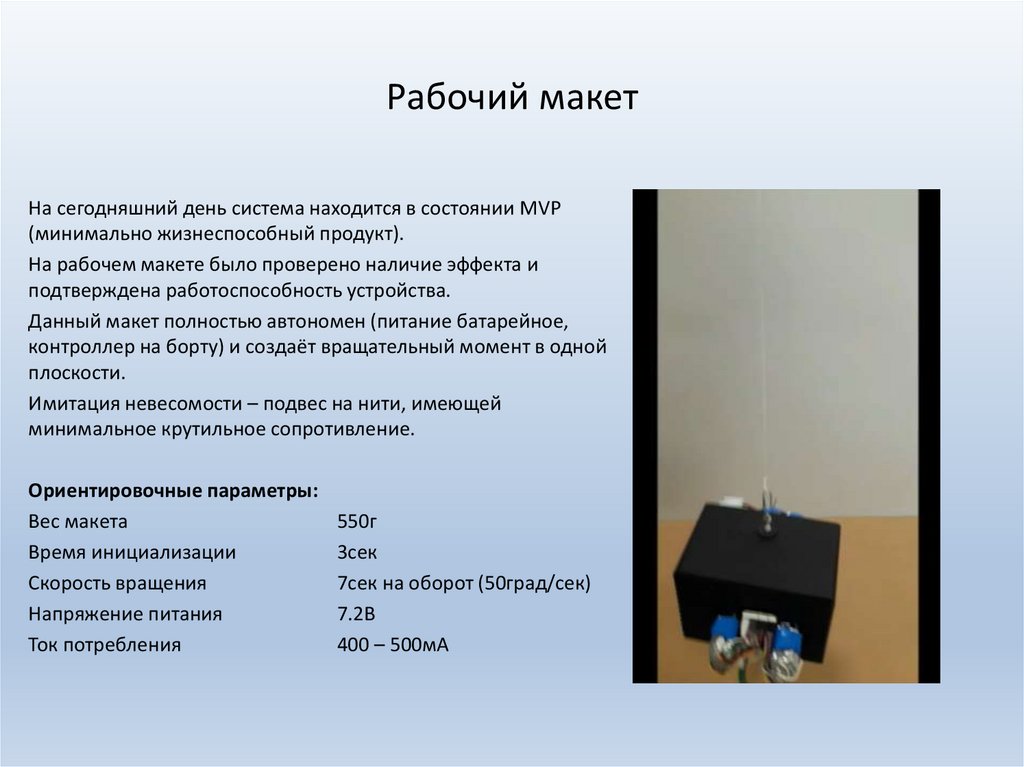
Рабочий макетНа сегодняшний день система находится в состоянии MVP
(минимально жизнеспособный продукт).
На рабочем макете было проверено наличие эффекта и
подтверждена работоспособность устройства.
Данный макет полностью автономен (питание батарейное,
контроллер на борту) и создаёт вращательный момент в одной
плоскости.
Имитация невесомости – подвес на нити, имеющей
минимальное крутильное сопротивление.
Ориентировочные параметры:
Вес макета
Время инициализации
Скорость вращения
Напряжение питания
Ток потребления
550г
3сек
7сек на оборот (50град/сек)
7.2В
400 – 500мА
8.
ФИНАНСОВЫЕ ПОКАЗАТЕЛИ ПРОЕКТАСтоимость блока маховиков, выполняющего
аналогичную функцию (но со всеми
присущими ему недостатками) составляет
около 1млн рублей.
Предварительная стоимость
предлагаемого устройства существенно
ниже, при лучшем функционале.
Количество наноспутников, запускаемых ежегодно, исчисляется сотнями и непрерывно
растёт. Применение данного устройства может дать существенный экономический эффект.