

")


")















 physics
physicsSimilar presentations:
")







")

ЛЕКЦИЯ 3. Динамика системы материальных точек. Работа и энергия
1. ЛЕКЦИЯ № 3
I. Динамика системы материальных точек1.Система материальных точек. Центр масс (инерции).
Аддитивность массы в нерелятивистской механике.
2. Полный импульс системы материальных точек.
3. Закон сохранения импульса. Внутренние и внешние силы.
4. Теорема о движении центра масс. Система центра масс.
II. Работа и энергия
5. Механическая работа. Мощность.
6. Кинетическая энергия частицы и системы частиц.
7. Консервативные, неконсервативные и
гироскопические силы.
2. Система материальных точек
Рассмотрим систему, состоящую из n материальныхточек с заданными массами mi , где i 1,2,..., n - номер
частицы. Состояние системы материальных точек задаётся
путём определения состояния всех материальных точек,
входящих в данную систему:
ri t ,Vi t
Центром масс (или центром инерции) системы
материальных точек называется воображаемая точка С,
которая характеризует движение системы этих точек как
некого целого, и положение которой характеризуется
распределением массы этой системы.
n
n
Ее радиус-вектор равен:
mi ri mi ri
rc
i 1
n
mi
i 1
i 1
m
3. Центр масс ( инерции )
Воображаемую точку С с радиус-вектором1 n
rc mi ri
m i 1
где i - номер точки,
n - количество точек,
mi - масса i-ой точки и
m - масса всей системы
точек
называют центром масс
системы материальных
точек
Z
K
O
X
rc
Y
4. Аддитивность массы в нерелятивистской механике.
Полная масса системы материальных точек:m
n
m
i 1
i
в области малых скоростей c находится путём
сложения масс всех частиц систем (здесь
используется аддитивность массы в
нерелятивистской механики). В релятивистской
механике (v ~c) масса системы частиц зависит от
энергии взаимодействия между частицами, поэтому
последняя формула не справедлива.
5. Скорость центра масс системы материальных точек
Взяв производнуюпо времени, получим
rc
скорость центра масс:
1
rc mi ri
m i 1
n
где
n
n
drc 1
dri 1
c
mi
mi υi
dt m i 1
dt m i 1
dri - скорость i-ой материальной
i
dt
точки системы
Отметим, что из формулы в красной рамке следует
n
mi υi mυc
i 1
6. Полный импульс системы материальных точек (частиц)
В нерелятивистской механике полный импульссистемы материальных точек равен сумме
импульсов всех частиц системы:
n
p pi
i 1
где pi mi υi- импульс i–ой частицы.
n
Так как
, где
m m
m
υ
m
υ
ii
c
- скорость ц.м.
υ
c
i 1
n
i 1
i
то импульс системы частиц можно определить по
формуле:
p mυc
7.
npc m c mi i
- импульс центра масс
i 1
Импульс системы материальных точек
(импульс центра масс) равен произведению
массы системы на скорость ее центра масс.
Таким образом, связь импульса pc со
скоростью
υc
такая
же,
как
для
материальной точки с массой m
(масса
системы).
8.
9. Основное уравнение динамики поступательного движения произвольной системы частиц
Тела, не входящие в состав рассматриваемойсистемы, называют внешними телами, а силы,
действующие на систему со стороны этих тел –
внешними силами. Силы взаимодействия между
телами внутри системы, называют внутренними
силами.
Результирующая
всех
внутренних
сил
действующих на i-ое тело:
внутр. n
Fi
Fik Fi1 Fi 2 ... Fin ,
k i
где
k i , т.к.
i-ая точка не может действовать сама на себя.
10.
внеш.Обозначим Fi
– результирующая всех
внешних сил приложенных к i-ой точке
системы.
По второму закону Ньютона можно
записать систему уравнений:
внеш.
d
m1υ1 F1 F12 F13 ... F1n ,
dt
внеш.
d
m2υ2 F2 F21 F23 ... F2n ,
dt
...............................,
внеш.
d
mnυn Fn Fn1 ... Fn,n 1.
dt
11.
Сложимэти
уравнения и сгруппируем попарно
силы Fik и Fki:
n
d
внеш.
dt mi υi Fi F12 F21 ... Fn 1,n Fn,n 1 .
i 1
i 1
n
По третьему закону Ньютона Fik Fki
,
поэтому все выражения в скобках в правой части
уравнения равны нулю. Тогда получаем:
n
в неш.
d
dp
mi υi Fi .
dt
i 1 dt
i 1
n
n
в неш
в неш.
Fi
Вектор F
– суммарный(результирующий)
i 1
вектор всех внешних
сил, тогда:
в неш
dp
F
dt
12.
Скорость изменения импульса системыdp
F равна векторной сумме всех внешних
dt
сил, действующих на эту систему.
Это уравнение называют основным
уравнением динамики поступательного
движения системы
тел. Так как импульс
системы p mυc
то:
d
mυc F
dt
Наконец, можно записать основное уравнение
динамики поступательного движения
системы тел в виде:
где
ac
mac F
– ускорение центра масс.
13.
Центр масс механической системы движетсякак материальная точка, масса которой равна
массе всей системы, и на которую действует
сила, равная векторной сумме внешних сил,
приложенных к системе:
mac F
Это утверждение представляет собой теорему о
движении центра масс.
14. Закон сохранения импульса
Механическая система называется замкнутой(или изолированной), если на неё не действуют
внешние силы, т.е. она
неn взаимодействует с
внешними телами или F Fi в неш. 0.
i 1
Строго говоря, каждая реальная система тел
всегда не замкнута, т.к. подвержена, как минимум
воздействию гравитационных сил. Однако если
внутренние силы гораздо больше внешних, то
такую систему можно считать замкнутой
(например – Солнечная система).
Для замкнутой системы равнодействующий
вектор внешних сил тождественно равен нулю:
dp
F 0
dt
15.
nотсюда p mi vi mvc const.
i 1
Это есть закон сохранения импульса: импульс замкнутой
системы не изменяется во времени.
Так как импульс системы тел может быть представлен в виде
произведения суммарной массы тел на скорость центра инерции:
то :
p mυc
c
При любых процессах, происходящих в замкнутых
(изолированных)
системах,
скорость
центра
масс
сохраняется неизменной.
Закон сохранения импульса является одним из основных
законов природы. Он был получен как следствие законов
Ньютона, но он справедлив и для микрочастиц и для
релятивистских скоростей, когда
c.
mυ const
16. Система центра масс
Система отсчёта, движущаяся со скоростью центрамасс, называется системой центра масс(с.ц.м). В
этой системе отсчёта начало системы координат
помещается в центр масс, поэтому rc 0 ,
drc
следовательно,
c
dt
0
Это означает, что полный импульс системы частиц
равен нулю, и наблюдается только относительное
движение частиц, поэтому она удобна для анализа
столкновения частиц.
17.
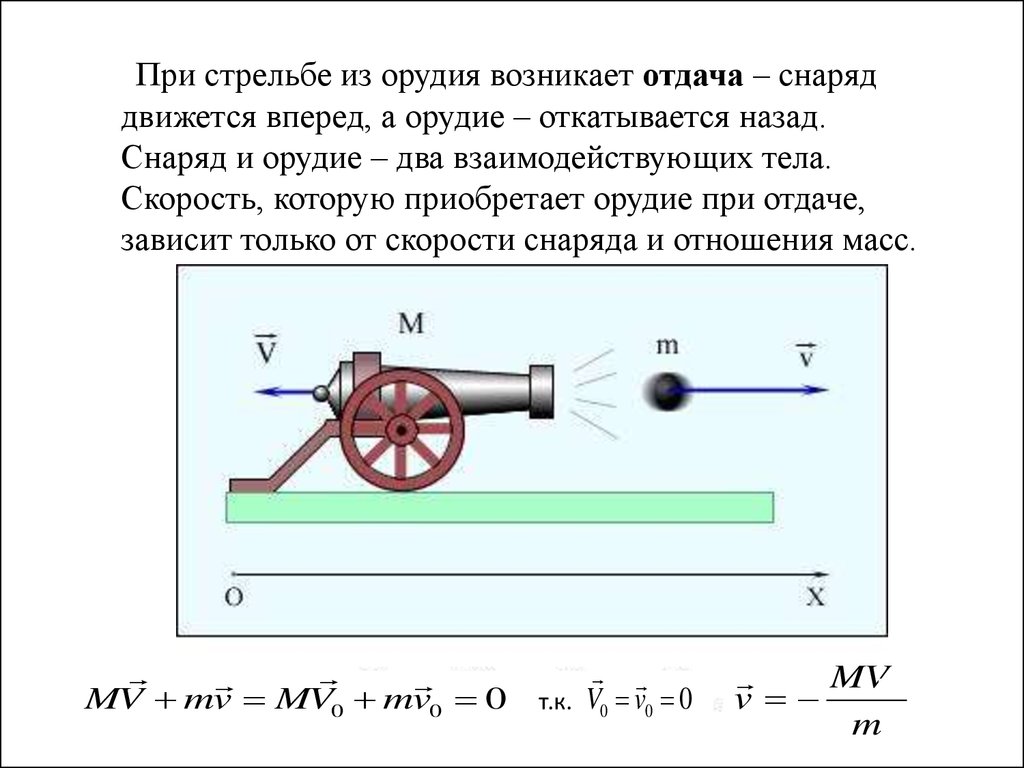
При стрельбе из орудия возникает отдача – снаряддвижется вперед, а орудие – откатывается назад.
Снаряд и орудие – два взаимодействующих тела.
Скорость, которую приобретает орудие при отдаче,
зависит только от скорости снаряда и отношения масс.
MV mv MV0 mv0 0
т.к. V0 v0 0
MV0
v
m
18. Механическая работа. Мощность.
Изменение механического движения тела вызываетсясилами, которые действуют на него со стороны других тел.
Чтобы количественно характеризовать процесс обмена
энергии между взаимодействующими телами, в механике
вводится понятие работы силы.
Если тело движется прямолинейно и на него действует
постоянная сила F , которая составляет некоторый угол
с направлением перемещения, то работа этой
силы равна произведению проекции силы Fs F F cos
s
на перемещение точки приложения силы
A Fs s Fs cos
19.
В общем случае сила может изменяться как по модулю,так и по направлению.
Если рассматривать
элементарное перемещение dr , то
силу F можно считать постоянной, а движение точки –
прямолинейным.
Элементарная работа силы F на перемещении dr равна
скалярному произведению:
dA Fdr F cos ds Fs ds
где
- угол между векторами
F и d r
ds dr -элементарный путь
Fs - проекция вектора
силы
на перемещение dr
20.
Работа силына участке траектории от
точки 1 до точки 2 равна алгебраической сумме
элементарных работ на отдельных бесконечно
малых участках пути.
Эта сумма равна определенному интегралу:
2
2
1
1
A F cos ds Fs ds
21.
Для вычисления этого интеграла надо знатьзависимость силы Fs от пути
вдоль
траектории 1-2.
Если такая зависимость представлена
графически, тогда искомая работа численно равна
площади фигуры между осью
и кривой Fs(S) .
s
s
22.
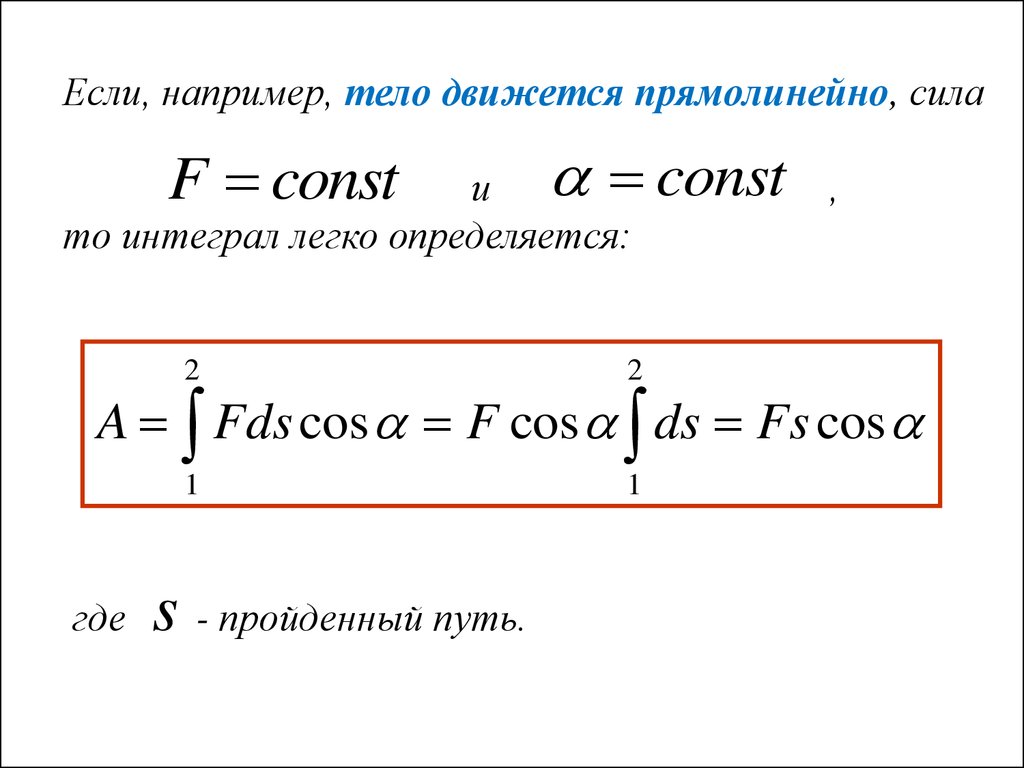
Если, например, тело движется прямолинейно, силаи
то интеграл легко определяется:
F const
2
2
1
1
const
,
A Fds cos F cos ds Fs cos
где
s - пройденный путь.
23.
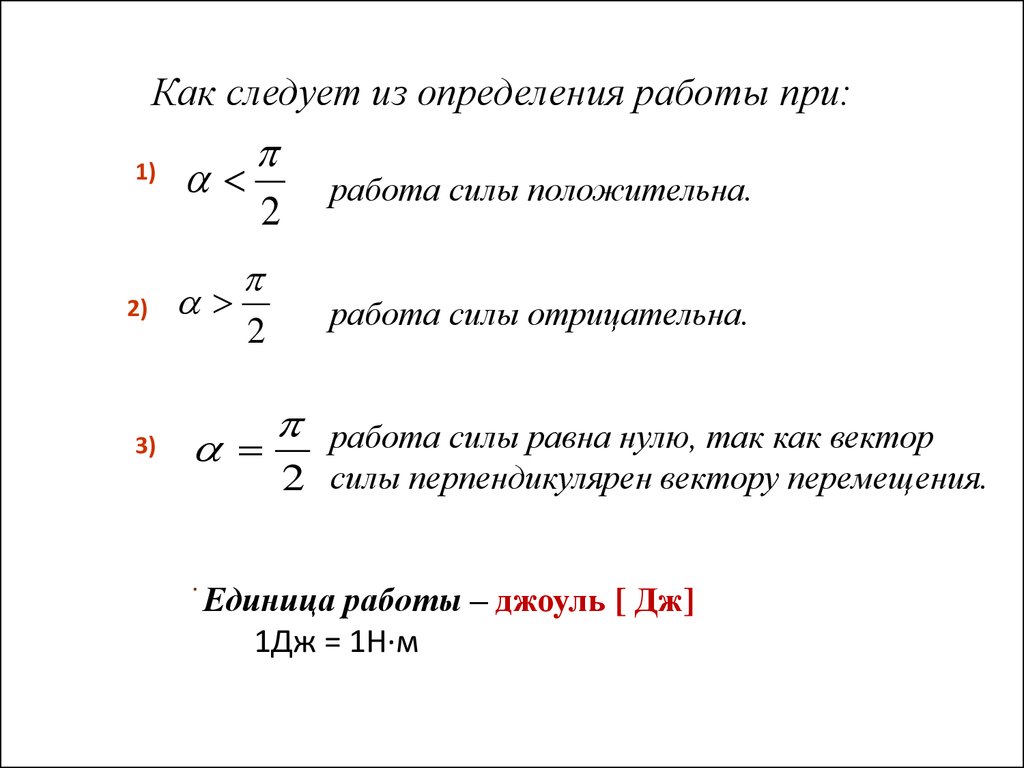
Как следует из определения работы при:1)
2)
3)
2
2
работа силы положительна.
работа силы отрицательна.
работа силы равна нулю, так как вектор
2 силы перпендикулярен вектору перемещения.
.
Единица работы – джоуль [ Дж]
1Дж = 1Н·м
24.
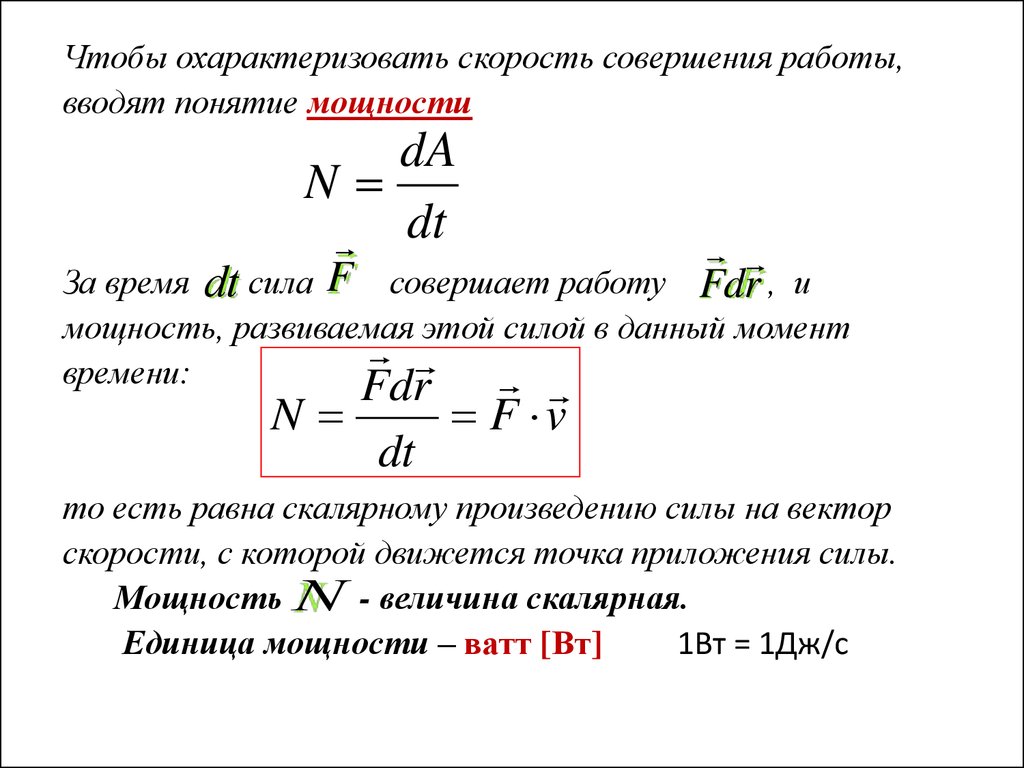
Чтобы охарактеризовать скорость совершения работы,вводят понятие мощности
dA
N
dt
Fdr ,
За время dt сила F совершает работу
и
мощность, развиваемая этой силой в данный момент
времени:
Fdr
N
dt
F v
то есть равна скалярному произведению силы на вектор
скорости, с которой движется точка приложения силы.
Мощность N - величина скалярная.
Единица мощности – ватт [Вт]
1Вт = 1Дж/с
25.
Математическая справкаНахождение определенного интеграла:
а
a
x
a
F kx dx k
k
0
n 1 0
n 1
0
n 1
a
n 1
n
где
k const
x
n
- степенная функция с показателем степени n
0 и а – пределы интегрирования
26. Примеры вычисления работы
Пример . Рассмотрим в качестве примера работу,совершаемую при деформации пружины.
В случае упругой деформации пружины
x
l0
0
где
x
F
F k x
F
приложенная сила,
x деформация пружины
Сила упругости пропорциональна деформации:
Fупр
F
x
Fупр F kx.
27.
гдеx
Fx
k
- проекция силы упругости на ось
;
- коэффициент упругости (для пружины –
жесткость), а знак минус указывает, что сила
направлена в сторону, противоположную деформации.
Элементарная работа dA , совершаемая силой при бесконечно малой деформации dx , равна:
dA Fx dx kxdx
Полная работа силы
Fx
x
равна:
2
kx
A kxdx
2
0
28. Кинетическая энергия частицы.
Кинетическая энергия механической системы – этоэнергия механического движения этой системы.
Имеем покоящееся тело. На него действует сила F , под
действием которой тело начинает двигаться.
При этом сила совершает работу, а энергия движущегося
тела возрастает на величину затраченной работы.
Работа dA силы F на пути, который тело прошло за
время возрастания скорости от 0 до V , идет на увеличение
кинетической энергии. Покажем это.
29.
Работа силы на конечном перемещении:2
2
A F dA FdS
1 2
1
1
Элементарная работа суммы сил F F1 F2 ... Fn :
dA F dA1 dA2 ... dAn
Работа суммы сил:
AF
1 2
A1 2
n
F A1 2 Fi ,
i 1
FdS
1
1
2
2
то есть:
dP .
Vdt
dt
30.
dP .A F FdS
Vdt
dt
1 2
1
1
dP
или
Здесь
dS Vdt F
2
2
dt
d d
dV
F
P mV m
dt
dt
dt
Полная работа определяется следующим выражением:
A1 2
V2
2
2
2
mV2 mV1
F m VdV m VdV
2
2
1
V1
Выражение
2
mV
K
2
кинетическая
энергия
31.
Полная работа связана с изменением кинетической энергииследующим образом:
A F K 2 K1
1 2
Работа всех сил, действующих на тело, равна приращению
кинетической энергии этой системы.
Полученную формулу можно записать компактно:
или dK dA.
A K
Последнее выражение можно озвучить так:
Изменение кинетической энергии dK равно работе
внешних сил dA.
Важно отметить, что приращение кинетической энергии
определяется работой не только внешних, но и внутренних
сил.
32.
Кинетическая энергия зависит от массы и скорости тела .Говорят : кинетическая энергия системы есть функция
состояния движения.
В разных инерциальных системах отсчета, движущихся
относительно друг друга, скорость тела, а ,следовательно,
и его кинетическая энергия будут неодинаковы.
Таким образом, кинетическая энергия зависит
от выбора системы отсчета.
33.
Из теоремы Кенинга следуетВ системе центра масс: V 0
c
2
0
MV
К К
2
Кинетическая энергия системы материальных точек
равна сумме кинетической энергии всей массы
системы, мысленно сосредоточенной в её центре масс
и движущейся вместе с ним, и кинетической энергии
той же системы в её относительном движении по
отношению к центру масс.
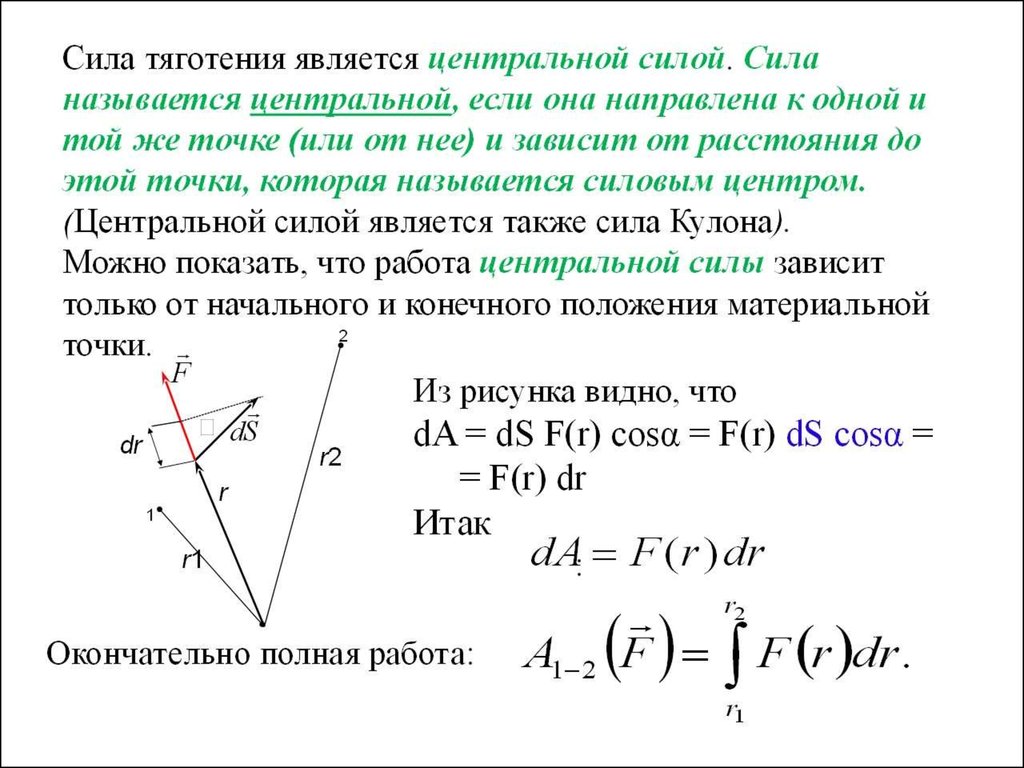
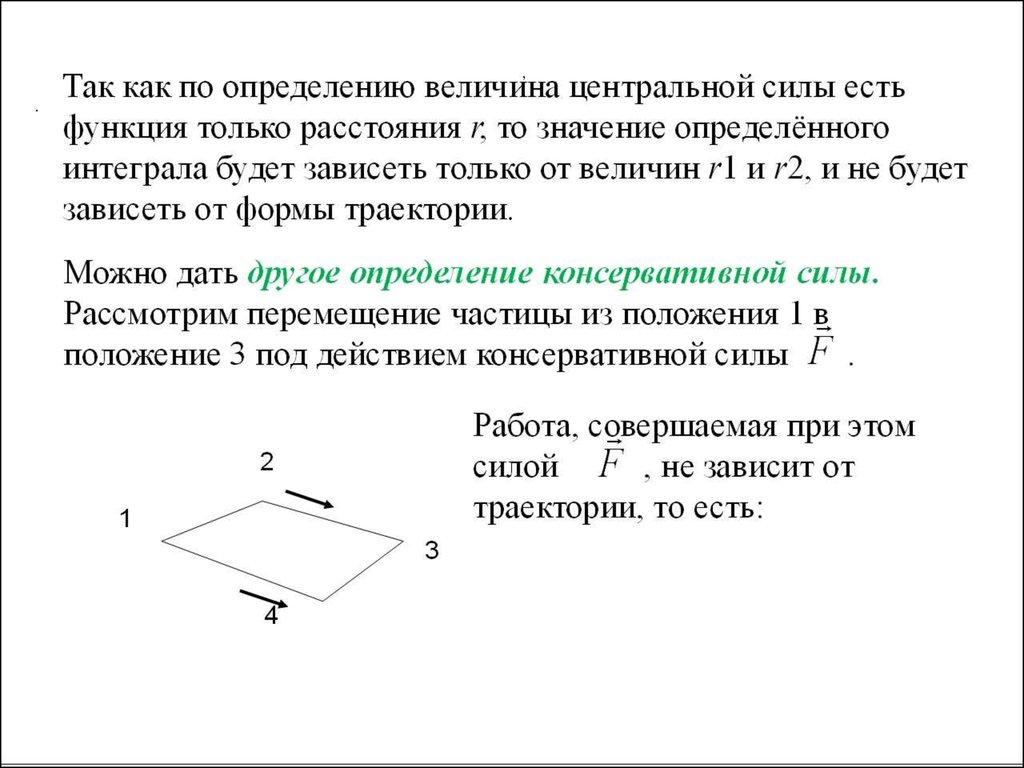
34. Консервативные и неконсервативные силы.
Консервативными называются силы, работа которыхне зависит от того, по какой траектории произошло
перемещение тела, а зависит только от его начального и
конечного положений. Примеры таких сил : упругие силы и
гравитационные силы. Работа упругих сил была рассмотрена
ранее.
Определим работу, совершаемую силой тяготения
при перемещении ею материальной точки массой m .
На расстоянии R на данное тело действует сила:
Mm
F G 2
R
35.
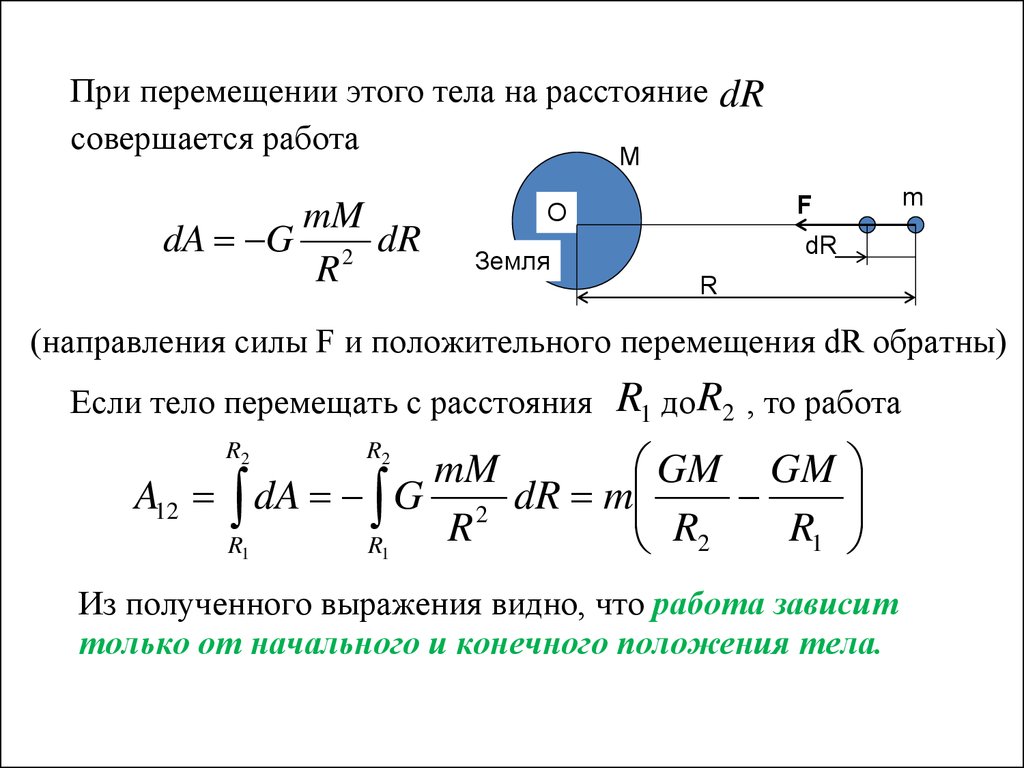
При перемещении этого тела на расстояние dRсовершается работа
M
mM
dA G 2 dR
R
F
О
m
dR
Земля
R
(направления силы F и положительного перемещения dR обратны)
Если тело перемещать с расстояния
R1 до R2 , то работа
GM GM
mM
A12 dA G 2 dR m
R
R1
R2
R1
R1
R2
R2
Из полученного выражения видно, что работа зависит
только от начального и конечного положения тела.
36.
37.
26.12.201638.
26.12.201639.
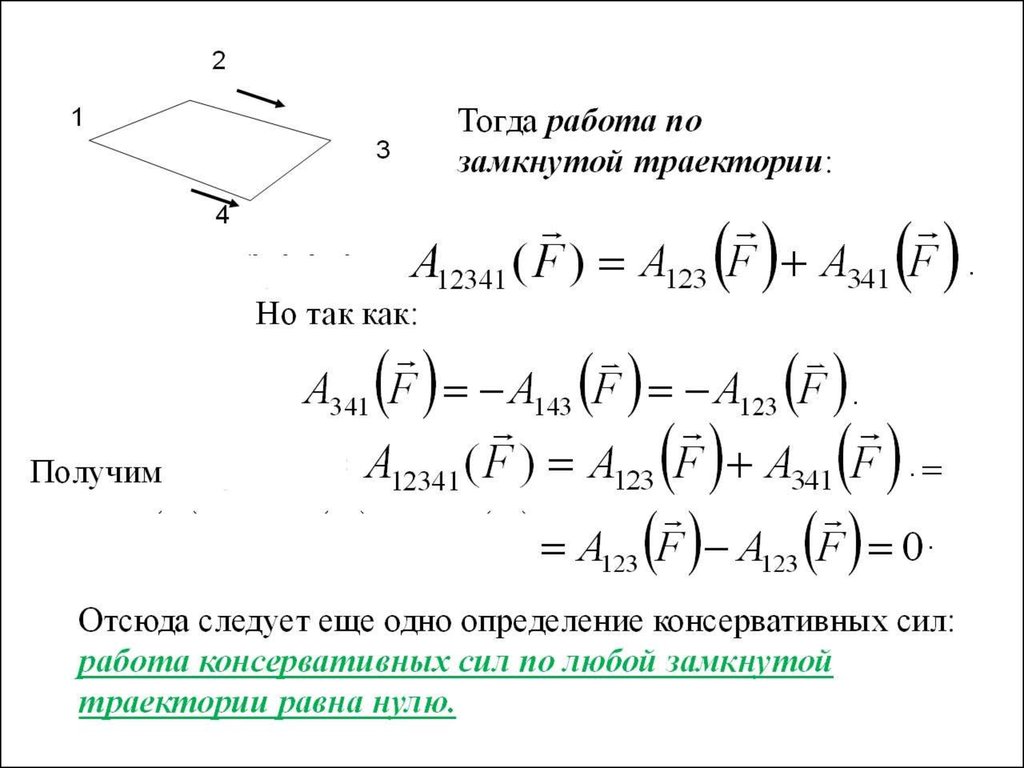
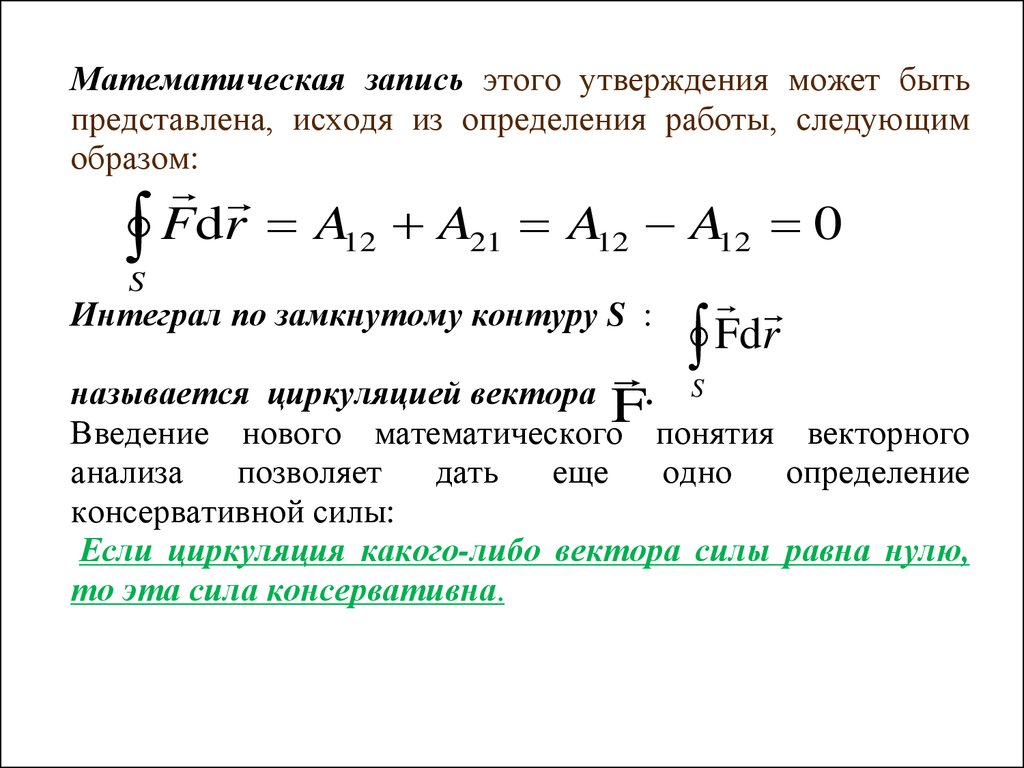
Математическая запись этого утверждения может бытьпредставлена, исходя из определения работы, следующим
образом:
F
d
r
A
A
A
A
0
12
21
12
12
S
Интеграл по замкнутому контуру S :
Fdr
называется циркуляцией вектора
. S
F
Введение нового математического понятия
векторного
определение
анализа
позволяет
дать
еще
одно
консервативной силы:
Если циркуляция какого-либо вектора силы равна нулю,
то эта сила консервативна.
40.
Неконсервативные силы. К ним относятся преждевсего, так называемые, диссипативные силы:
трение, сила вязкого сопротивления. Эти силы
зависят не только от конфигурации тел, но и от
относительных скоростей движения.
Сила трения направлена против скорости тела,
поэтому работа сил трения отрицательна.
Отсюда определение:
Диссипативными называются такие силы,
полная работа которых при любых движениях в
замкнутой системе всегда отрицательна.
41.
Еще один вид неконсервативных сил гироскопические силы.Эти силы зависят от скорости материальной точки и
перпендикулярны к этой скорости. Работа таких сил равна
Нулю. Примером таких сил является сила Кореолиса
По определению, элементарная работа dA силы Кориолиса Fк:
dA FК dS FК dS Cos 0
так как
, поскольку
Cos 0
.
2