















 physics
physicsSimilar presentations:







")


Динамика вращательного движения. Работа при вращательном движении
1.
Работа при вращательном движенииЭлементарная
работа
dA = Ft ds
ds = rdj
dA = Ft rdj
2.
dA = M z djПолная работа
A=
j2
ò
M z dj
j1
Если Mz = const., то
A = M z Dj
3.
Кинетическая энергия вращенияДля каждой МТ
dm 2
dWk =
v
2
dm × r w
dWk =
2
2
w
Wk = ò dWk =
2
2
r
dm
ò
2
2
Iw
Wk =
2
2
4.
Для катящегося телаmv
ICw
Wk =
+
2
2
2
C
С
r
vC
W
2
пост .
k
W
вр
k
5.
Основной закон динамикивращательного движения
Тангенциальная сила Ft , совершая
работу dA = Mzdφ увеличивает
кинетическую энергию тела на dWk.
M z dj = dWk
6.
Справа распишемIw
dWk = d (
) = Iw dw
2
2
Возьмем производную по времени
dj
dw
dj
Mz
= Iw
=I
e
dt
dt
dt
7.
Сократив на dj /dt, получимосновной закон динамики
вращательного движения:
M z = Ie
8.
r rЕсли F = Ft , то справедлива
векторная форма:
r
r
M = Ie
Этот закон вращательного
движения аналогичен II-му
закону Ньютона для
поступательного движения.
9.
Физический смысл моментаинерции: если на тела, обладающие
разными моментами инерции
подействовать одним и тем же
моментом силы, то тело, обладающее
большим моментом инерции, получит
меньшее угловое ускорение.
Момент инерции есть мера инертности
тела для вращательного движения.
10.
Уравнение моментовМомент импульса твердого тела
Lz = I zw
Возьмем производную по времени:
dLz
dw
= Iz
= I ze = M z
dt
dt
11.
dLz= Mz
dt
&
или Lz = M z
В векторной форме:
r
dL r
=M
dt
12.
Закон сохранения момента импульсаРассмотрим замкнутую систему тел.
Сумма моментов внешних сил равна нулю.
r
f 21
r
p2
1
2
r
f12
r
p1
r
r
f12 и f 21 - силы взаимодействия
13.
rr
r
r
r
dL1
dL2 r
M 12 =
, M 21 =
, M 12 = - M 21
dt
dt
Полный момент импульса системы тел
r r r
L = L1 + L2
r
r r
r
dL d ( L1 + L2 ) r
=
= M 12 + M 21 = 0
dt
dt
14.
В замкнутой системе тел полныймомент импульса сохраняется.
r
r
dL
= 0 или L = const .
dt
15.
Свободные и главные оси вращенияОсь вращения, положение которой в
пространстве остается неизменным в
отсутствие внешних сил, называется
свободной осью тела.
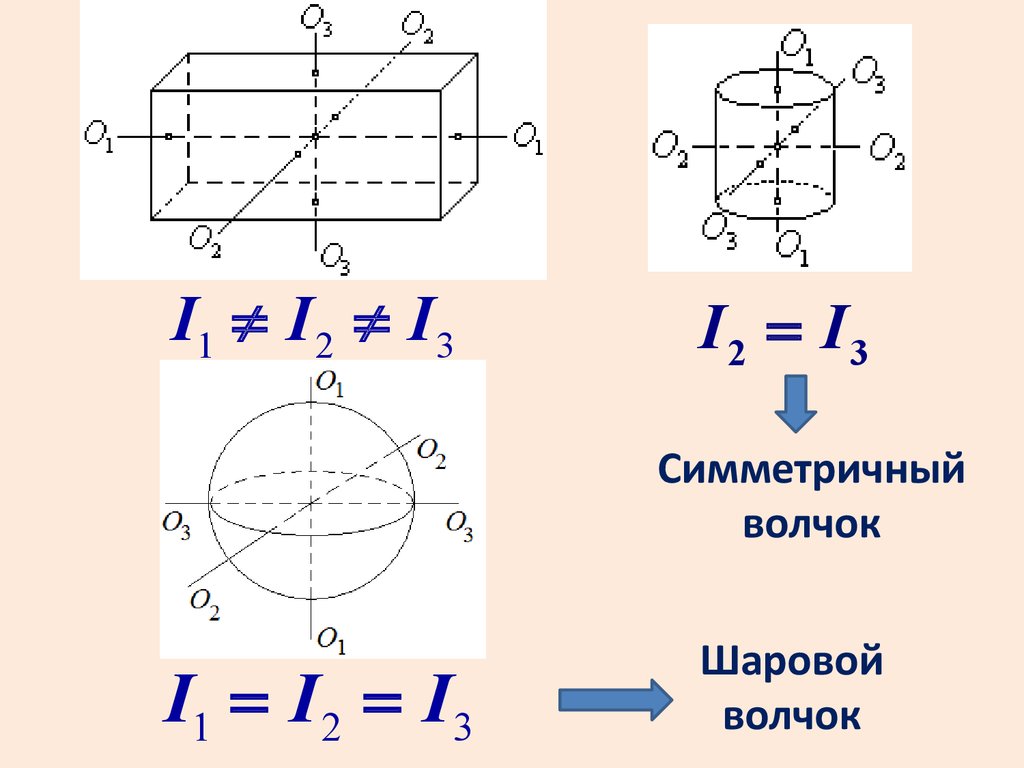
16.
Для любого тела существуют тривзаимно перпендикулярные,
проходящие через центр инерции оси,
которые могут служить свободными
осями. Их называют
главными осями инерции.
Моменты инерции относительно
главных осей называют
главными моментами инерции .
17.
I1 ¹ I 2 ¹ I 3I2 = I3
Симметричный
волчок
I1 = I 2 = I 3
Шаровой
волчок
18.
ГироскопыГироскоп - это
массивное
симметричное тело,
вращающееся с
большой угловой
скоростью вокруг оси
симметрии.
19.
Гироскопический эффектr
r
L = Iw
r
r dL
M=
dt
r r
dL = Mdt
20.
Движение оси, вдоль которойнаправлен момент импульса
гироскопа, под действием
внешних сил, называют
прецессией.
21.
Прецессия гироскопа под действиемсилы тяжести.
r
dL
dj =
L
r
dL = Mdt
Mdt
dj =
L
dj M
w =
=
dt
L
w - угловая скорость прецессии гироскопа
22.
rr r
M = w , L
M = w L sin
M = mg l = mg l sin
w L sin = mg l sin
mg l
w =
L