
 electronics
electronicsSimilar presentations:










Электроприводы машин. Автоматическое регулирование угловой скорости и момента электроприводов
1.
7 Автоматическое регулирование угловой скорости имомента электроприводов
Для расширения диапазона регулирования и повышения точности
используются замкнутые системы регулирования.
Идея в следующем: в системе автоматически компенсируется
воздействие возмущающих факторов, и угловая скорость и момент
могут с большой точностью поддерживаться на требуемом уровне.
Система автоматического регулирования характеризуется наличием
обратных связей, которые делятся на жесткие и гибкие.
Жесткие связи действуют как в переходном,
так и в установившемся режимах работы,
гибкие только в переходном режиме.
2.
Различают положительные и отрицательные обратные связи.При увеличении регулируемой величины положительная связь еще
больше ее увеличивает, а отрицательная уменьшает.
Обратные связи могут передавать сигналы пропорциональные
значению напряжения, тока, момента, скорости, угла поворота и т.д.
Для осуществления автоматического регулирования необходимо
измерить сигнал обратной связи, затем результат сравнить с
заданным значением регулируемой величины и направить результат
регулируемому объекту. Для воздействия на регулирующий орган
применяется усилительное устройство.
Таким образом, система автоматического регулирования состоит из
регулируемого объекта и регулятора, реагирующего на изменение
регулируемой величины.
3.
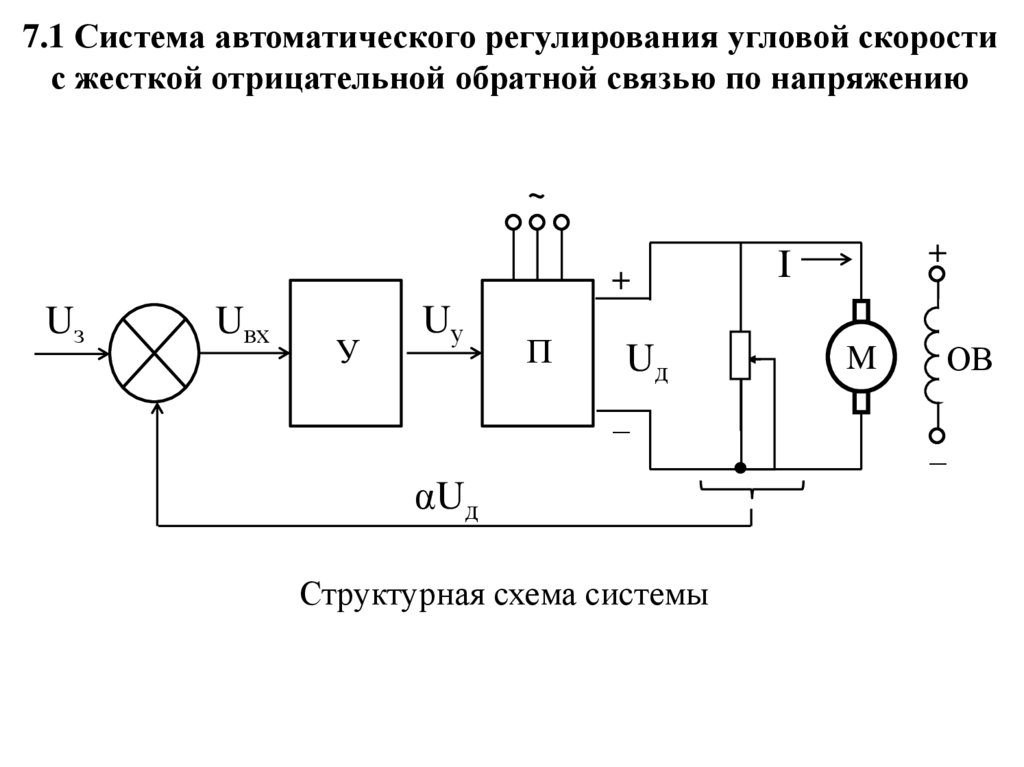
7.1 Система автоматического регулирования угловой скоростис жесткой отрицательной обратной связью по напряжению
~
+
Uз
Uвх
У
Uу
П
Uд
–
αUд
Структурная схема системы
+
I
M
ОВ
–
4.
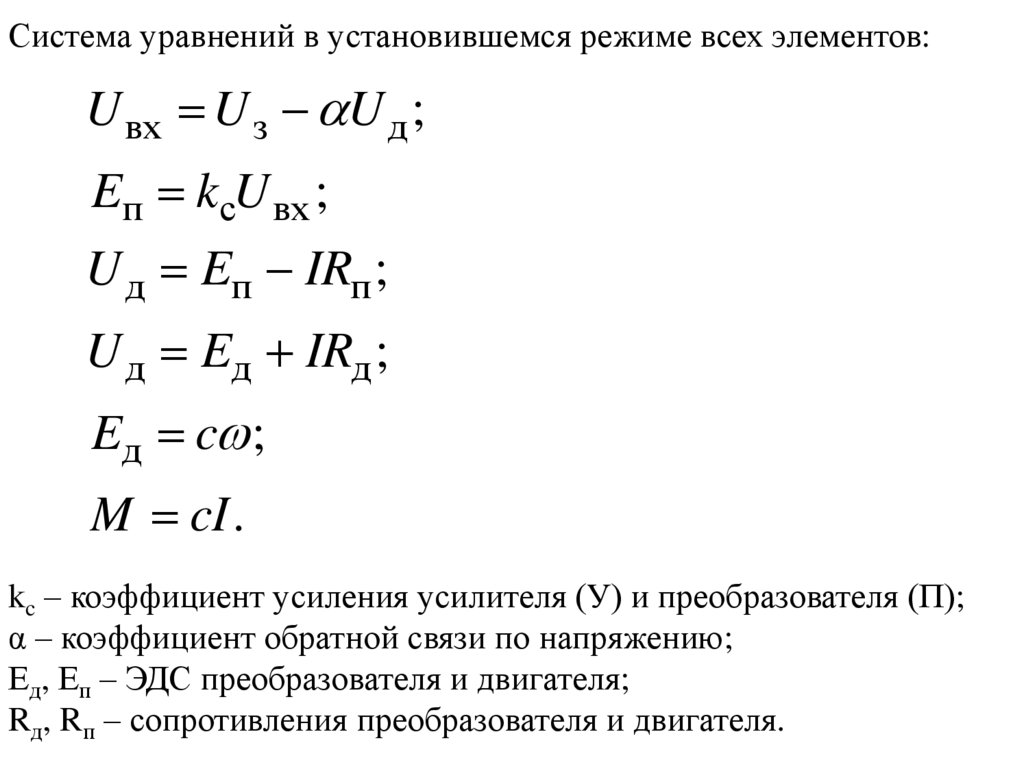
Система уравнений в установившемся режиме всех элементов:U вх U з U д ;
Eп kcU вх ;
U д Eп IRп ;
U д Eд IRд ;
Eд c ;
M cI .
kc – коэффициент усиления усилителя (У) и преобразователя (П);
α – коэффициент обратной связи по напряжению;
Ед, Еп – ЭДС преобразователя и двигателя;
Rд, Rп – сопротивления преобразователя и двигателя.
5.
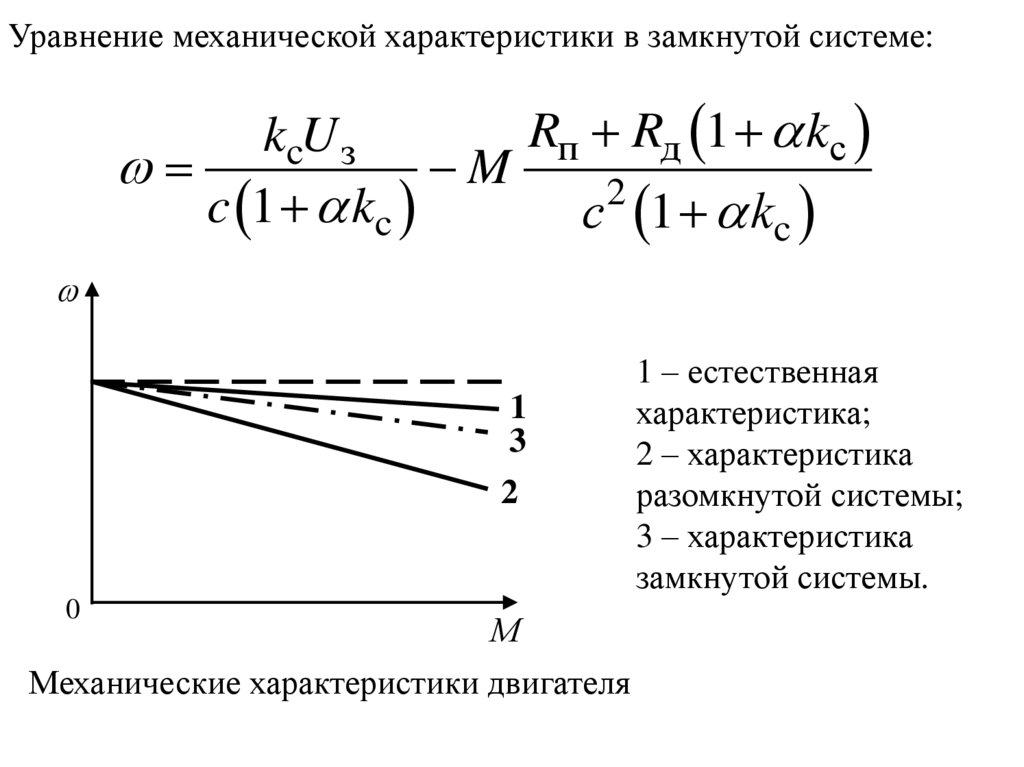
Уравнение механической характеристики в замкнутой системе:Rп Rд 1 kc
kcU з
M
2
c 1 kc
с 1 kc
1
3
2
0
М
Механические характеристики двигателя
1 – естественная
характеристика;
2 – характеристика
разомкнутой системы;
3 – характеристика
замкнутой системы.
6.
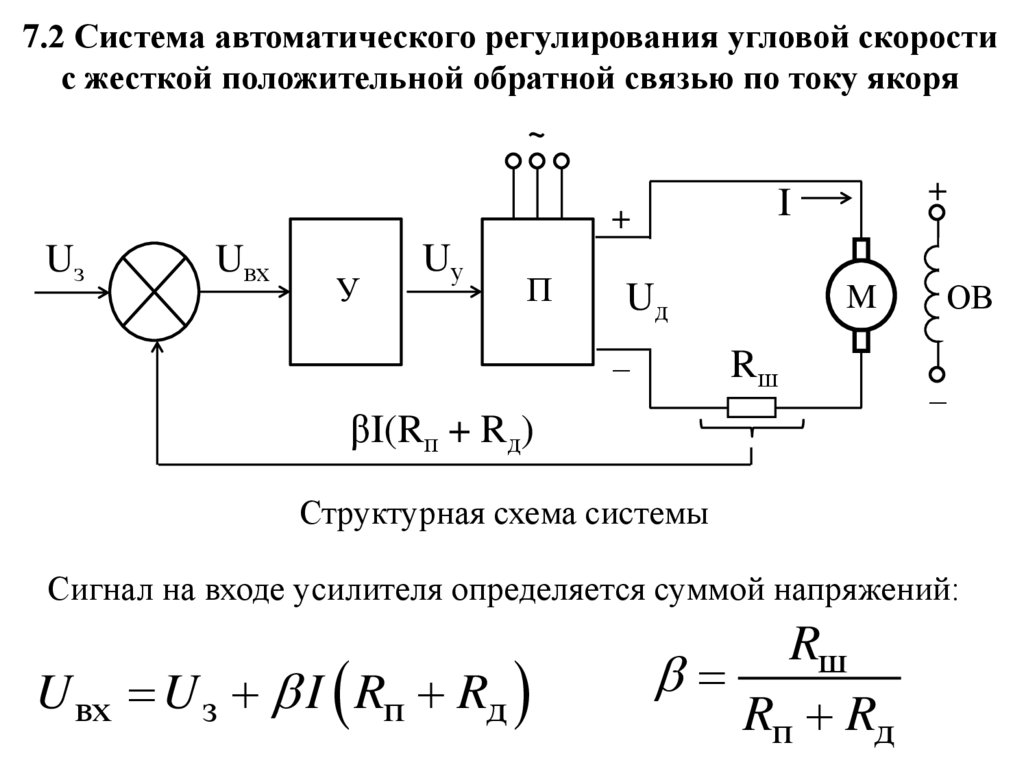
7.2 Система автоматического регулирования угловой скоростис жесткой положительной обратной связью по току якоря
~
+
Uз
Uвх
У
Uу
П
+
I
Uд
–
M
Rш
βI(Rп + Rд)
ОВ
–
Структурная схема системы
Сигнал на входе усилителя определяется суммой напряжений:
U вх U з I Rп Rд
Rш
Rп Rд
7.
Уравнение механической характеристики в замкнутой системе:Rп Rд 1 kc
kcU з
M
2
c
с
1
3
2
0
М
Механические характеристики двигателя
1 – естественная
характеристика;
2 – характеристика
разомкнутой системы;
3 – характеристика
замкнутой системы.
8.
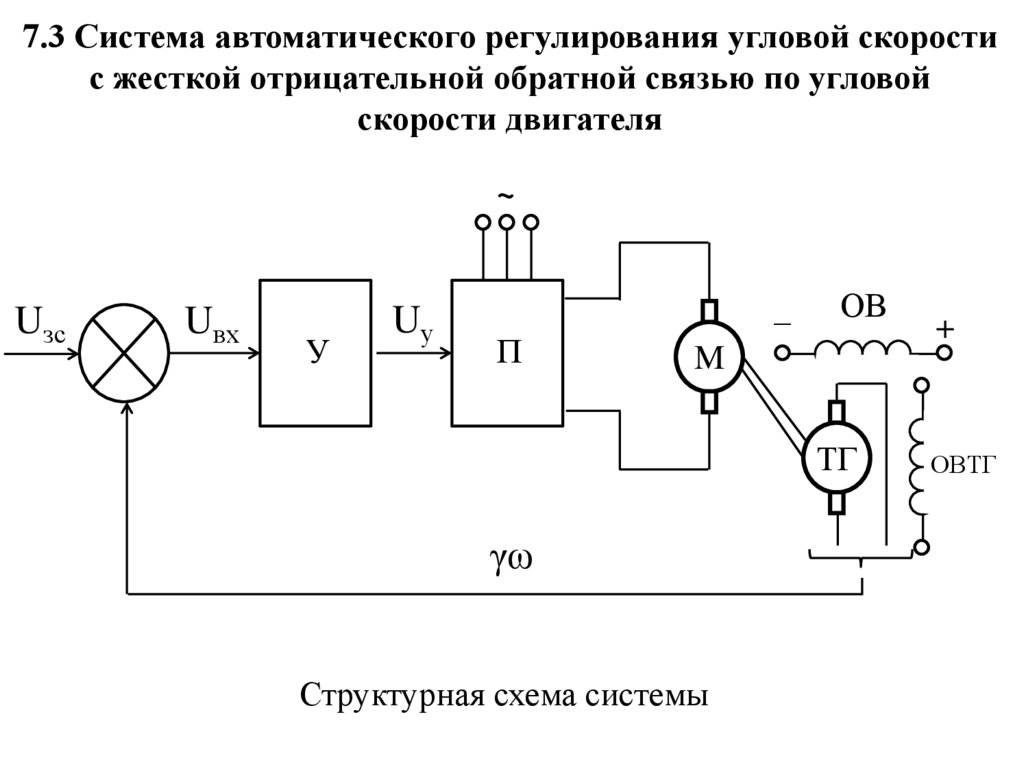
7.3 Система автоматического регулирования угловой скоростис жесткой отрицательной обратной связью по угловой
скорости двигателя
~
Uзс
Uвх
У
Uу
П
–
ОВ
+
M
ТГ
γω
Структурная схема системы
ОВТГ
9.
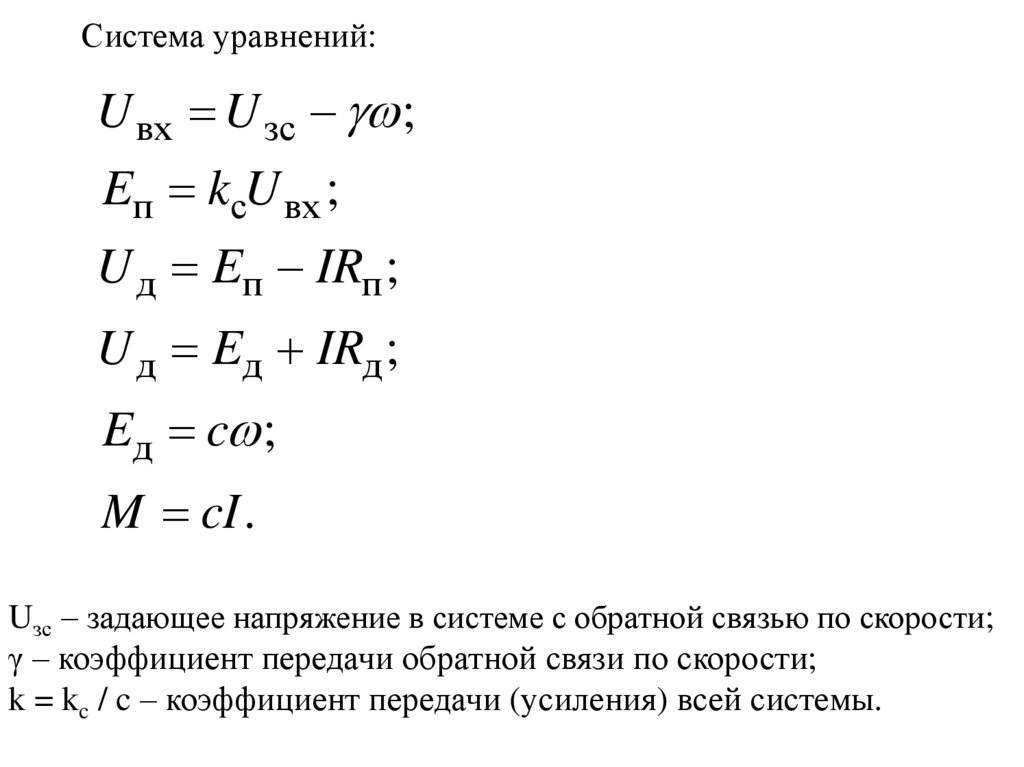
Система уравнений:U вх U зс ;
Eп kcU вх ;
U д Eп IRп ;
U д Eд IRд ;
Eд c ;
M cI .
Uзс – задающее напряжение в системе с обратной связью по скорости;
γ – коэффициент передачи обратной связи по скорости;
k = kc / c – коэффициент передачи (усиления) всей системы.
10.
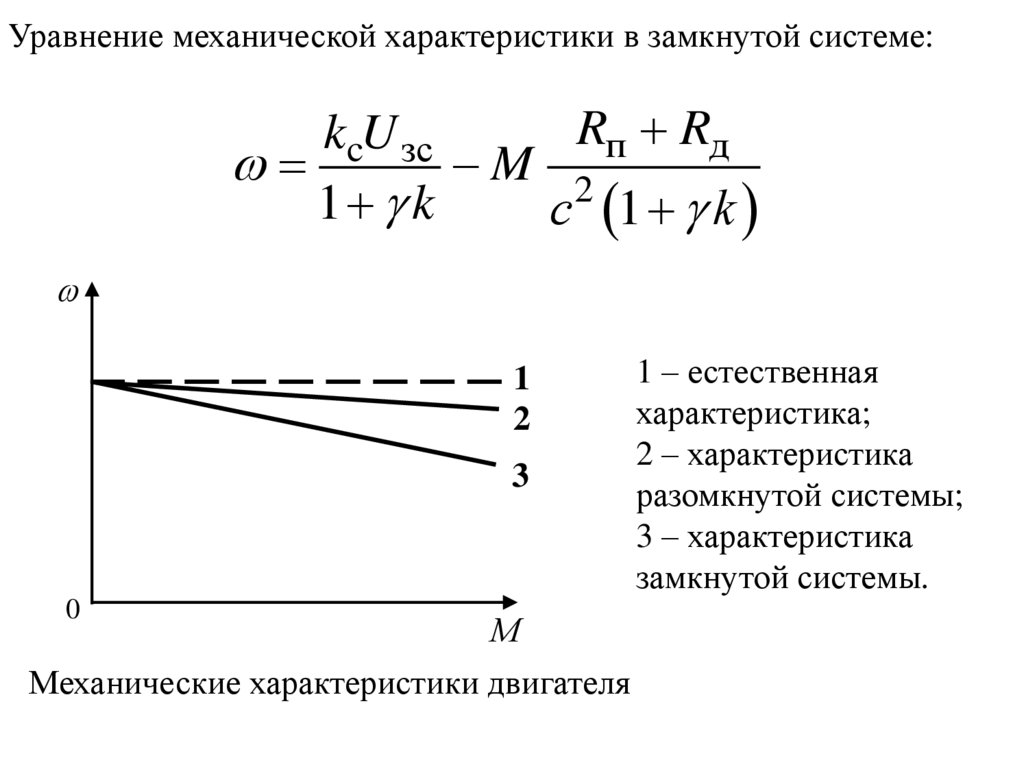
Уравнение механической характеристики в замкнутой системе:Rп Rд
kcU зс
M 2
1 k
с 1 k
1
2
3
0
М
Механические характеристики двигателя
1 – естественная
характеристика;
2 – характеристика
разомкнутой системы;
3 – характеристика
замкнутой системы.