


")




 electronics
electronicsSimilar presentations:
")

")







Реостатное и импульсное регулирование угловой скорости двигателей
1. ЭЛЕКТРОМЕХАНИКА
ИТТСУ кафедра «Управление и защита информации»ЭЛЕКТРОМЕХАНИКА
Реостатное и импульсное
регулирование угловой скорости
двигателей
1
2.
По книге:• Чиликин М. Г., Сандлер А. С. Общий курс
электропривода: Учебник для вузов
2
3. двигатель постоянного тока независимого возбуждения
ДВИГАТЕЛЬ ПОСТОЯННОГОТОКА НЕЗАВИСИМОГО
ВОЗБУЖДЕНИЯ
3
4.
• Реостатное регулирование угловой скоростипроизводится с помощью контакторов,
замыкающих отдельные ступени резисторов, т. е.
скорость привода изменяется дискретно, поэтому
данный способ при контакторном управлении не
обеспечивает плавного регулирования.
Применение жидкостного (при малой мощности
двигателя) или ползункового реостата позволяет
достигнуть плавного регулирования.
• При реостатном регулировании значительная
часть мощности теряется на реостатах
• Практически невозможно автоматическое
регулирование
4
5.
• Другим способом достижения плавногорегулирования при введении резисторов в цепь
якоря является использование (при небольшой
мощности двигателя) импульсного
параметрического регулирования угловой
скорости, применяемого также в
автоматизированном электроприводе для
стабилизации (поддержания) заданного значения
угловой скорости при изменении момента
нагрузки или для предварительного снижения
скорости перед остановкой привода.
5
6.
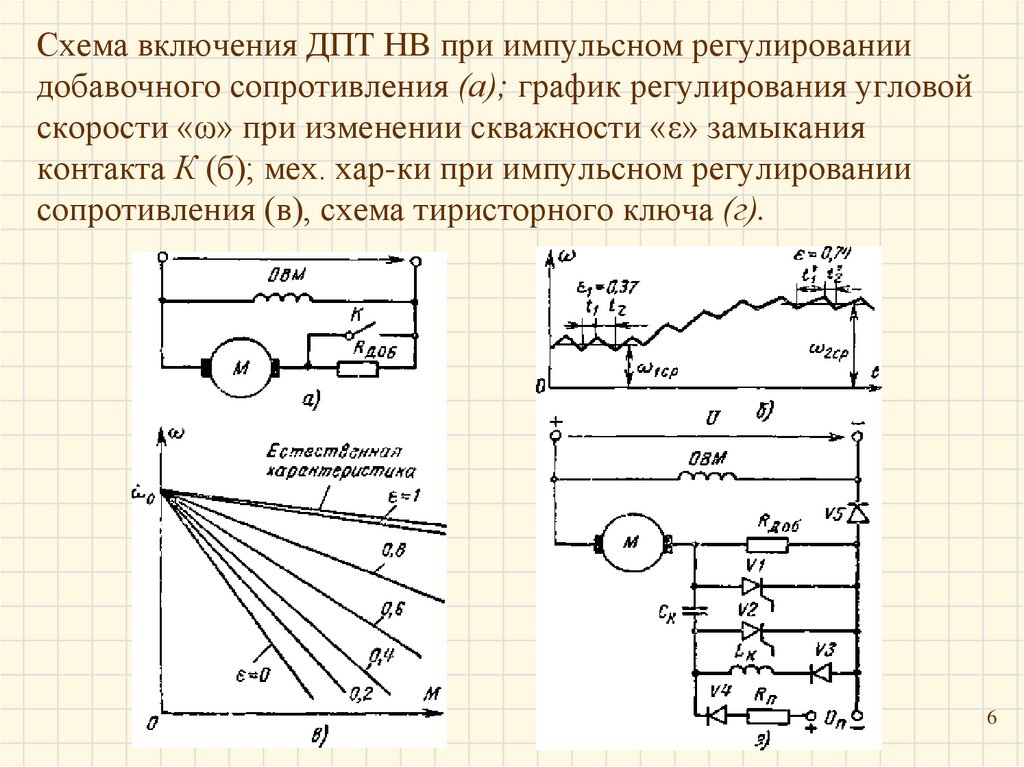
Схема включения ДПТ НВ при импульсном регулированиидобавочного сопротивления (а); график регулирования угловой
скорости «ω» при изменении скважности «ε» замыкания
контакта К (б); мех. хар-ки при импульсном регулировании
сопротивления (в), схема тиристорного ключа (г).
6
7.
78.
89.
910.
• Так, если момент нагрузки постоянен (следовательно,постоянна потребляемая мощность) и угловая скорость
двигателя уменьшается вдвое, то примерно половина
мощности, потребляемой из сети, будет рассеиваться в виде
теплоты, выделяемой в реостате, т. е. данные способы
регулирования (реостатный и импульсный параметрический)
являются неэкономичными.
• При импульсном регулировании сопротивления
энергетические показатели несколько хуже, чем при
ступенчатом его изменении. Это обусловлено наличием в
кривой тока якоря переменной составляющей, вызванной
коммутациями ключа, что приводит к увеличению потерь
энергии.
10
11. Регулирование угловой скорости ДПТ НВ изменением напряжения якоря с помощью управляемых тиристорных выпрямителей
1112.
1213. Регулирование угловой скорости ДПТ НВ изменением напряжения якоря посредством импульсных регуляторов напряжения (ШИП)
1314.
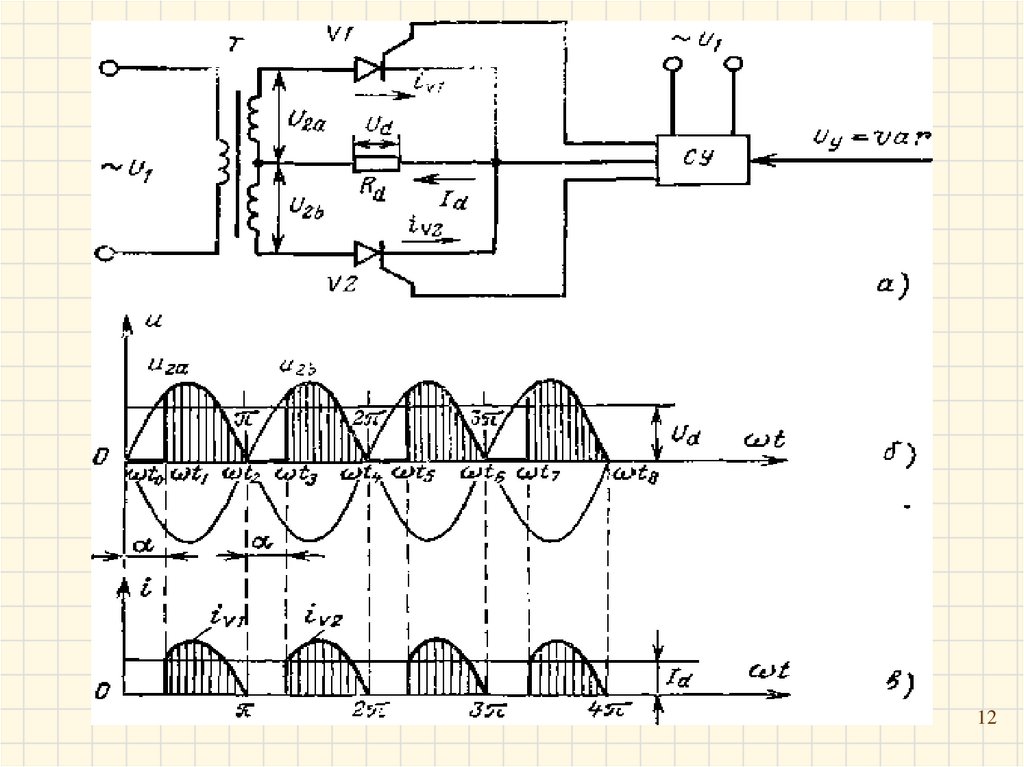
• Регулирование напряжения на якоре двигателяможно осуществить импульсным методом, когда
двигатель периодически подключается к
источнику питания и отключается от него. В
период отключения электропривод продолжает
работать за счет запасенной кинетической и
электромагнитной энергии.
14
15.
1516.
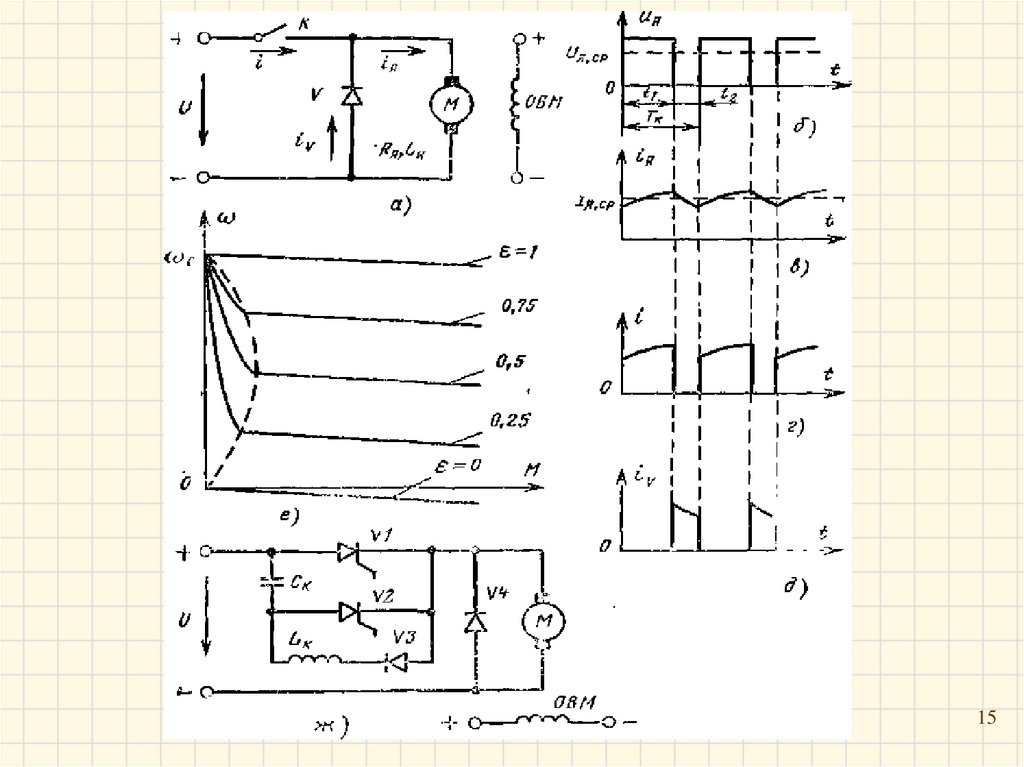
• Схема включения двигателя постоянного токанезависимого возбуждения при импульсном
регулировании напряжения показана на рис а).
Диод V, шунтирующий якорь двигателя, создает
цепь для протекания тока якоря под действием
ЭДС самоиндукции, возникающей в
индуктивности обмотки якоря в период
разомкнутого состояния ключа К.
• Это создает условия для непрерывного
протекания тока якоря, что существенно
уменьшает его пульсации и устраняет
коммутационные перенапряжения на ключе К и
обмотке якоря.
16
17.
1718.
1819.
• Основным средством сужения зоны прерывистыхтоков, уменьшения пульсаций тока якоря (момента)
и угловой скорости относительно среднего значения
и, следовательно, дополнительных потерь в
обмотках якоря является увеличение частоты
коммутации ключа К.
• Обычно частота коммутации: 800-1200 Гц.
• Увеличению ее препятствует рост потерь в ключе
(транзисторе, тиристоре) и его предельные
динамические параметры.
• Для реализации рассмотренного способа
регулирования напряжения могут быть
использованы либо транзисторы, работающие в
режиме ключа, либо тиристоры.
19
20.
• Электроприводы с ШИР напряжения на якоредвигателя вследствие их относительной простоты и
высокого быстродействия широко используются в
различных отраслях промышленности и техники, в
транспортных установках и т. д. Они особенно
удобны при наличии сети постоянного тока или в
автономных установках при питании привода от
аккумуляторов.
• В случае сети переменного тока питание привода с
ШИР производится через неуправляемый
выпрямитель. При этом возникают большие
трудности с организацией тормозных режимов и
реверса двигателя по цепи якоря, вследствие чего
область применения такого привода ограничивается 20
установками малой мощности.
21. Регулирование угловой скорости электроприводов переменного тока
РЕГУЛИРОВАНИЕ УГЛОВОЙСКОРОСТИ
ЭЛЕКТРОПРИВОДОВ
ПЕРЕМЕННОГО ТОКА
21
22.
• Для плавного и глубокого регулированияугловой скорости различных производственных
механизмов в настоящее время широко
применяются разнообразные электроприводы с
двигателями постоянного тока.
• Однако наряду с использованием
электроприводов постоянного тока в последние
годы с развитием полупроводниковой техники
все большее внимание уделяется применению
различных систем регулируемых
электроприводов переменного тока с
асинхронными двигателями с короткозамкнутым
ротором или двигателями с фазным ротором.
22
23.
• Применение двигателей переменного токаобусловлено их простотой, дешевизной,
повышенной надежностью, существенно (в 2—3
раза) меньшими габаритами и массой по сравнению
с двигателями постоянного тока.
• Некоторые способы регулирования угловой
скорости не требуют специальных
преобразовательных устройств.
• К недостаткам относятся небольшая плавность и
невысокие энергетические показатели.
• Более эффективные способы регулирования
осуществляются при помощи сравнительно сложных
преобразовательных устройств и средств
управления.
23
24. Реостатное и импульсное параметрическое регулирование
РЕОСТАТНОЕ И ИМПУЛЬСНОЕПАРАМЕТРИЧЕСКОЕ РЕГУЛИРОВАНИЕ
24
25.
• Введение резисторов в цепь ротора (реостатноерегулирование) позволяет, как и для двигателей
постоянного тока, регулировать угловую
скорость двигателя. Плавность регулирования
зависит от числа ступеней включаемых
резисторов. Регулирование осуществляется вниз
от основной угловой скорости.
• Реостатные характеристики асинхронного
двигателя отличаются невысокой жесткостью,
уменьшающейся с ростом сопротивления
резисторов в роторной цепи.
25
26.
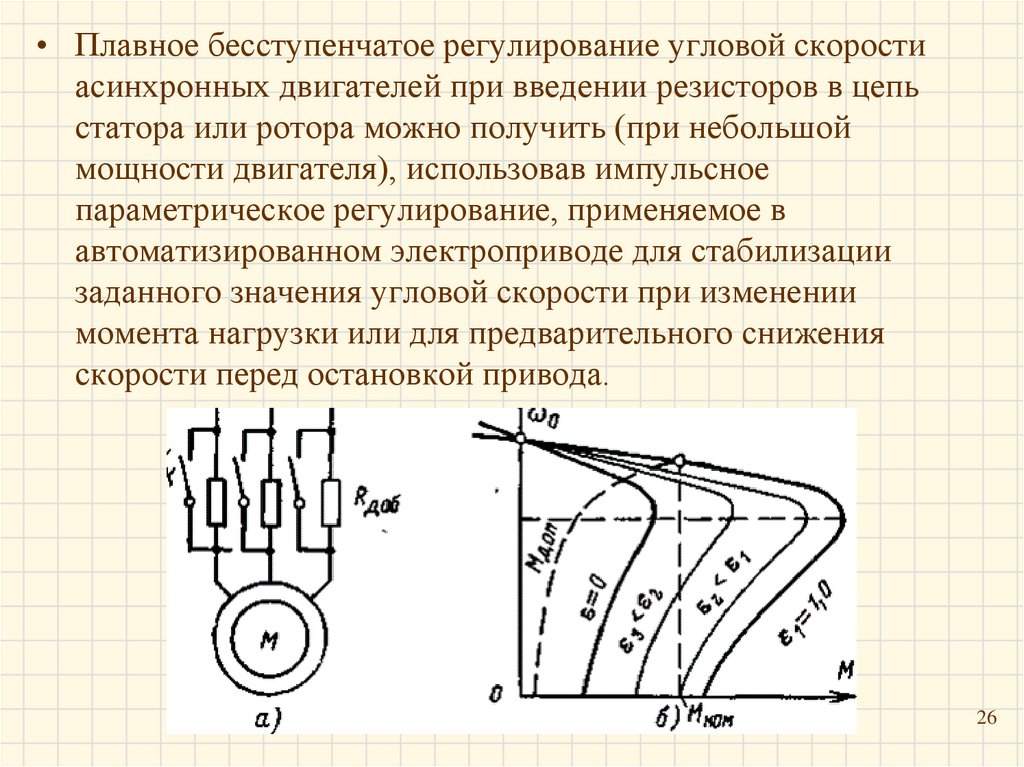
• Плавное бесступенчатое регулирование угловой скоростиасинхронных двигателей при введении резисторов в цепь
статора или ротора можно получить (при небольшой
мощности двигателя), использовав импульсное
параметрическое регулирование, применяемое в
автоматизированном электроприводе для стабилизации
заданного значения угловой скорости при изменении
момента нагрузки или для предварительного снижения
скорости перед остановкой привода.
26
27.
• При ε = 1 двигатель будет работать на естественнойхарактеристике (ключи К двусторонней
проводимости — полупроводниковые или
контактные — постоянно замкнуты).
• При ε = 0 двигатель будет работать на реостатной
характеристике, соответствующей постоянно
включенному резистору Rд (ключи К разомкнуты).
• При увеличении активного сопротивления цепи
статора уменьшаются максимальный момент и
критическое скольжение, модуль жесткости
механической характеристики и стабильность
угловой скорости уменьшаются.
27
28.
2829.
• Поэтому схема, показанная на рис. а), можетбыть использована в приводах малой мощности и
в кратковременном режиме работы. Диапазон
регулирования обычно не превышает
(1,15—1,2) : 1 при продолжительном режиме
работы.
• В кратковременном режиме работы
регулирование угловой скорости в более
широких пределах может производиться лишь
при осуществлении замкнутых систем
управления, в которых используются обратные
связи для автоматического поддержания угловой
скорости двигателя на заданном уровне.
29
30.
• Лучшее использование двигателя приимпульсном параметрическом регулировании
угловой скорости асинхронного двигателя
достигается, когда применяется двигатель с
фазным ротором. В этом случае дополнительные
потери мощности, обусловленные
регулированием угловой скорости, в основном
выделяются в добавочных резисторах вне
машины, поэтому допустимый момент для
двигателя с независимой вентиляцией
оказывается примерно равным номинальному.
30
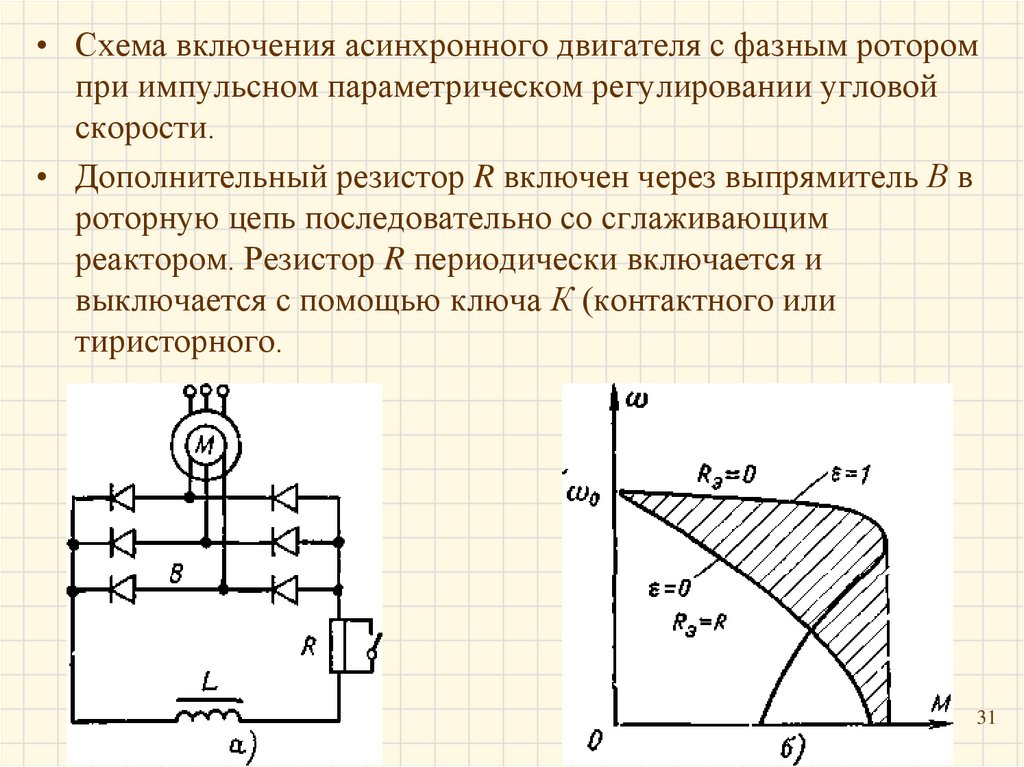
31.
• Схема включения асинхронного двигателя с фазным роторомпри импульсном параметрическом регулировании угловой
скорости.
• Дополнительный резистор R включен через выпрямитель В в
роторную цепь последовательно со сглаживающим
реактором. Резистор R периодически включается и
выключается с помощью ключа К (контактного или
тиристорного.
31
32.
• Когда ключ К замкнут (ε = 1), двигатель работаетна характеристике, соответствующей Rэ = 0 (рис.
б); если ключ разомкнут (ε = 0) и Rэ = R, то
двигатель работает на реостатной
характеристике.
• Рабочая зона при импульсном параметрическом
регулировании располагается между двумя
крайними характеристиками.
• Энергетические показатели при импульсном
регулировании сопротивления несколько хуже,
чем при ступенчатом его изменении из-за
пульсаций выпрямленного тока (или
действующего значения тока).
32
33. Регулирование изменением напряжения
РЕГУЛИРОВАНИЕ ИЗМЕНЕНИЕМНАПРЯЖЕНИЯ
33
34.
• Если регулировать напряжение, подводимое ктрем фазам статора асинхронного двигателя, то
можно, отвлекаясь от влияния параметров
регулирующего устройства на характеристики
двигателя, изменять максимальный момент, не
изменяя критического скольжения. Устройством
для регулирования напряжения может быть,
например, тиристорный регулятор; при этом в
каждой фазе статора двигателя находятся два
встречно-параллельно включенных тиристора.
Управляя углом включения тиристоров (фазовое
управление), можно плавно менять действующее
значение напряжения.
34
35.
3536.
• Регулирование угловой скорости двигателя приэтом способе происходит за счет уменьшения
модуля жесткости механических характеристик и
осуществляется вниз от номинальной угловой
скорости.
• Плавность регулирования определяется
плавностью изменения напряжения; при
применении тиристорного регулятора
напряжения угловая скорость регулируется
бесступенчато.
36
37.
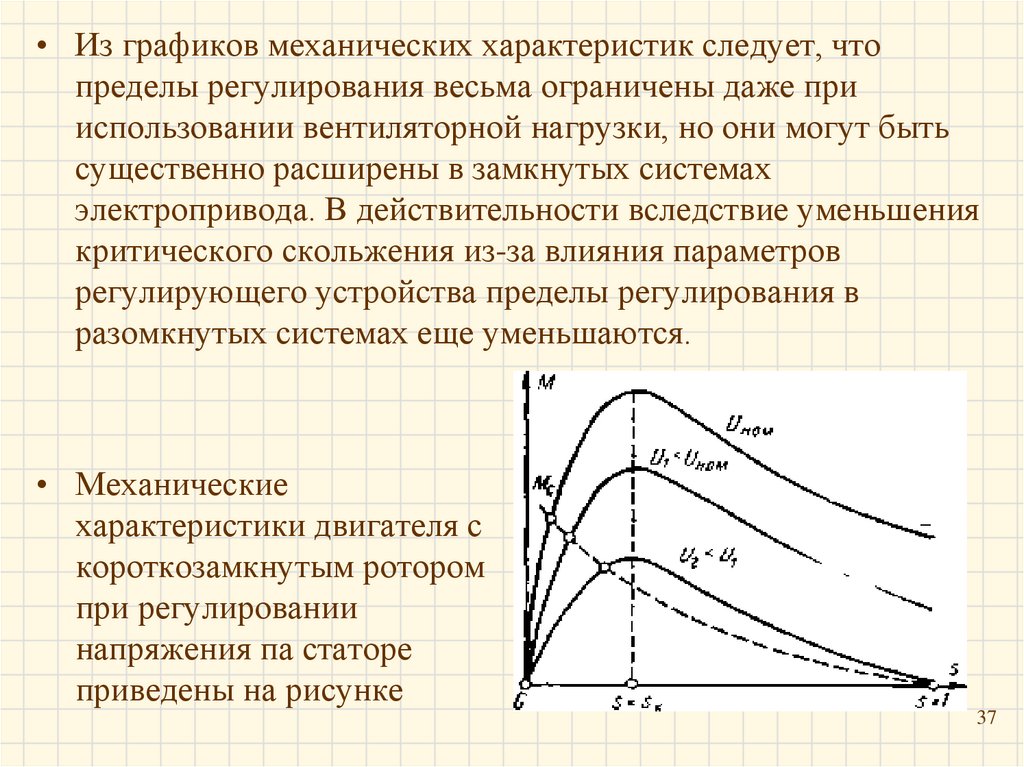
• Из графиков механических характеристик следует, чтопределы регулирования весьма ограничены даже при
использовании вентиляторной нагрузки, но они могут быть
существенно расширены в замкнутых системах
электропривода. В действительности вследствие уменьшения
критического скольжения из-за влияния параметров
регулирующего устройства пределы регулирования в
разомкнутых системах еще уменьшаются.
• Механические
характеристики двигателя с
короткозамкнутым ротором
при регулировании
напряжения па статоре
приведены на рисунке
37
38.
• Так как большие потери мощности скольжения вдвигателе с короткозамкнутым ротором
выделяются в самом роторе, то допустимый
момент резко уменьшается по мере роста
скольжения, поэтому такой неэкономичный
способ регулирования угловой скорости
асинхронного двигателя с короткозамкнутым
ротором можно использовать только при малой
мощности двигателя и в кратковременном
режиме работы.
38
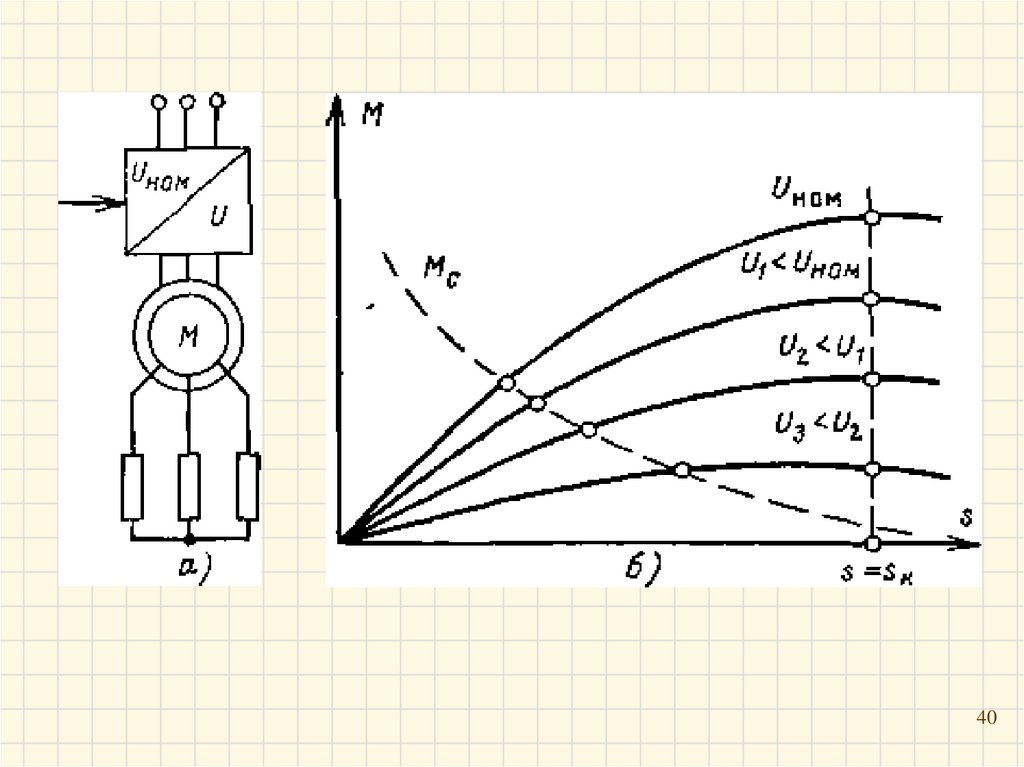
39.
• Лучшее использование двигателя и болееблагоприятные характеристики могут быть
получены, если применить двигатель с фазным
ротором, в роторную цепь его включить
дополнительный нерегулируемый резистор и
регулировать напряжение на статоре (рис. а).
Механические характеристики для
рассматриваемого способа приведены на рис. б.
• Преимущество этого способа по сравнению с
реостатным заключается в том, что управление
двигателем осуществляется плавно и
исключается контактная аппаратура в роторной
цепи.
39
40.
4041.
• Потери энергии в приводе получаются примернотакими же или несколько больше, как и при
реостатном регулировании; потери мощности
скольжения в основном выносятся из двигателя
и выделяются в дополнительном резисторе, что
увеличивает допустимый момент. Этот способ
может быть использован при вентиляторной
нагрузке для продолжительного режима, а при
Мс = const для кратковременного режима
работы.
• Очевидно, что регулирование изменением
напряжения может быть осуществлено только
вниз от основной угловой скорости.
41
42.
• Механические характеристики (рис. б) по мереснижения напряжения становятся мягкими и не
обеспечивают стабильности угловой скорости
при возможном отклонении нагрузки.
• Наличие постоянно включенного резистора
приводит к недоиспользованию двигателя по
скорости (угловая скорость всегда меньше
номинальной) и по мощности. Повышение
стабильности угловой скорости и расширение
диапазона регулирования до (5 — 10) : 1
достигается в замкнутых системах.
42
43.
• Для регулирования напряжения используютсякак тиристорные регуляторы напряжения с
фазовым управлением, так и
автотрансформаторы и импульсные, например
тиристорные или контактные регулирующие
устройства.
43
44.
4445.
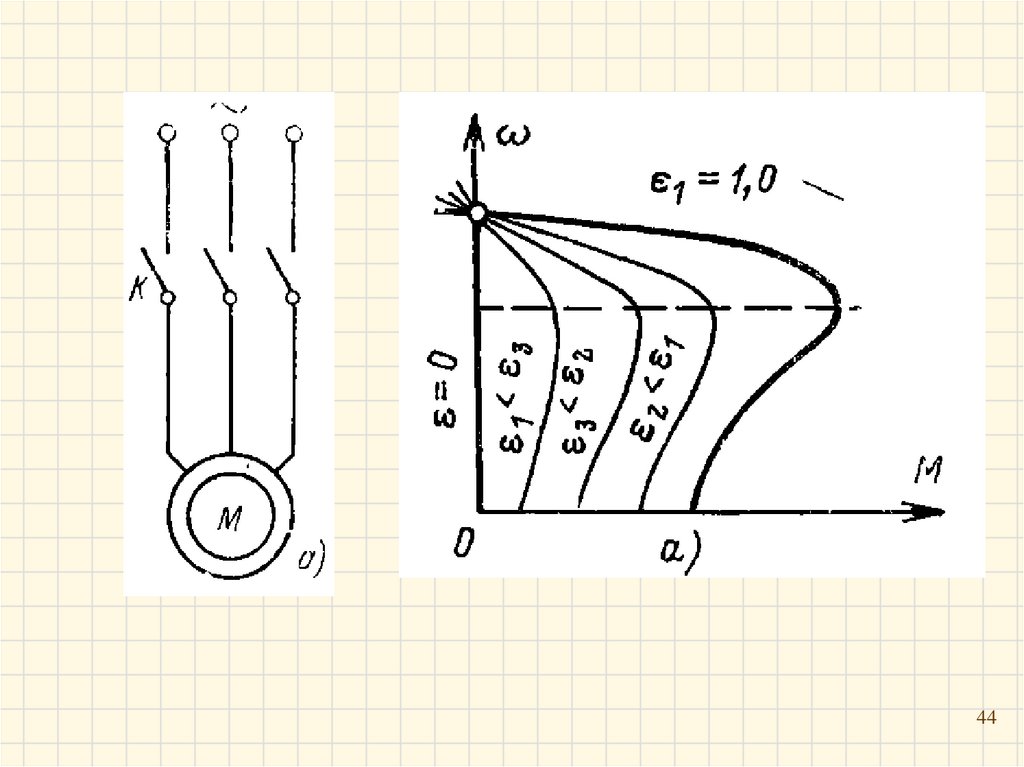
• Простейшая схема включения АД с КЗР приимпульсном регулировании напряжения
приведена на рис. (слева);
• Механические характеристики двигателя,
включенного по этой схеме, для различных
значений скважности ε включенного состояния
ключей К — на рис. (справа). При ε = 1 двигатель
работает на естественной характеристике (ключи
К постоянно замкнуты); при ε = 0 двигатель
отключен от сети. Характеристики двигателя и
его свойствапри эюм способе регулирования
такие же, как и при непрерывном регулировании
напряжения.
45
46.
• Энергетические показатели при импульсномрегулнровании напряжения хуже из-за больших
пульсаций напряжения и угловой скорости, а
также из-за переходных электромагнитных
процессов, вызванных включением и
отключением обмоток статора двигателя
• Частота коммутаций здесь может быть
небольшая, ограниченная целым числом
полупериодов для включенного состояния
тиристорных или симисторных ключей К-
46
47.
4748.
4849.
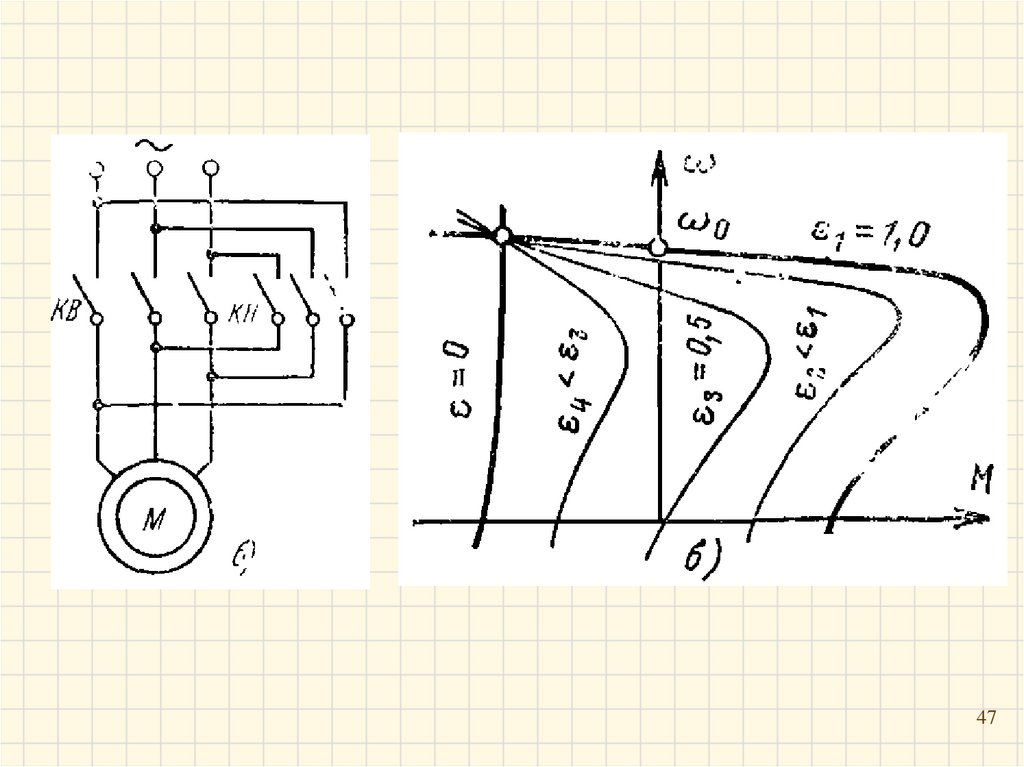
• Наложение двигательного и тормозного режимоввызывает почти непрерывные электромагнитные
переходные процессы, обусловливающие
увеличение потерь мощности. Основное
достоинство этого способа импульсного
регулирования — повышенная жесткость
механических характеристик в области
генераторного режима, что может быть полезным
при некоторых применениях этого способа.
• Импульсное регулирование переменного
напряжения применяется редко, оно уступило
место фазовому и другим видам непрерывного
регулирования.
49
50. Частотное регулирование
ЧАСТОТНОЕРЕГУЛИРОВАНИЕ
50
51.
5152.
• При уменьшении частоты поток возрастет и этоприведет к насыщению стали машины и как
следствие к резкому увеличению тока и
превышению температуры двигателя; при
увеличении частоты поток будет уменьшаться и
как следствие будет уменьшаться допустимый
момент.
52
53.
• Для наилучшего использования асинхронногодвигателя при регулировании угловой
скорости изменением частоты необходимо
регулировать напряжение одновременно в
функции частоты и нагрузки, что
реализуемо только в замкнутых системах
электропривода.
• В разомкнутых системах напряжение
регулируется лишь в функции частоты по
некоторому закону, зависящему от вида
нагрузки.
53
54.
• Экономические выгоды частотногорегулирования особенно существенны для
приводов, работающих в повторнократковременном режиме, где имеет место
частое изменение направления вращения с
интенсивным торможением.
54
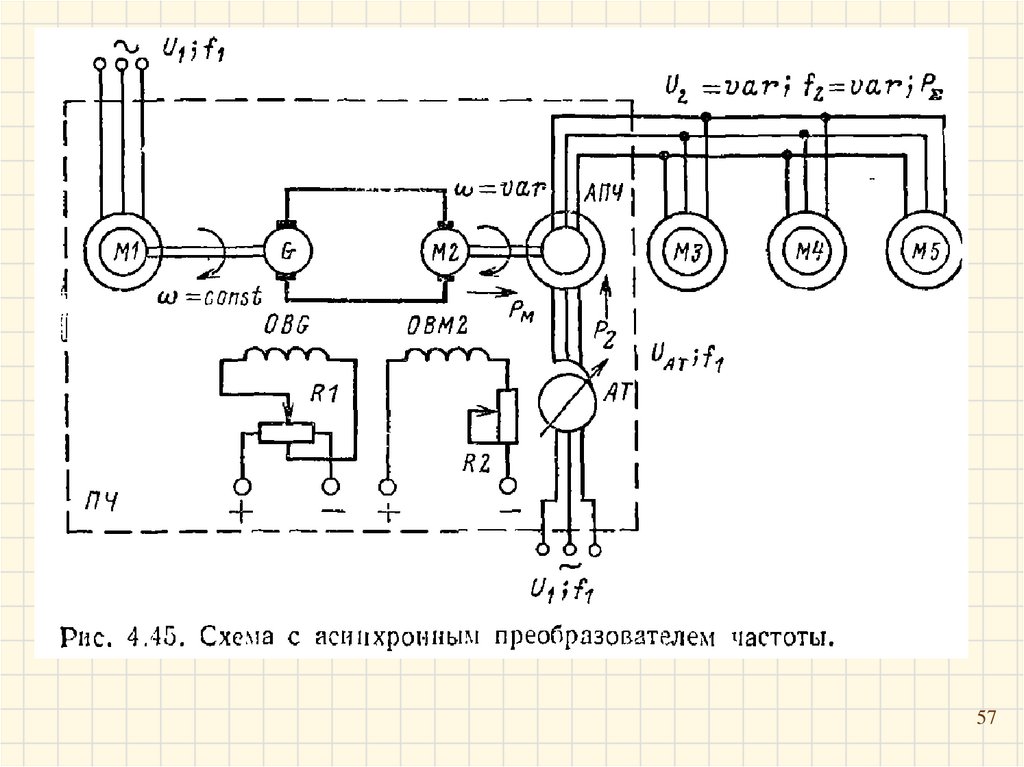
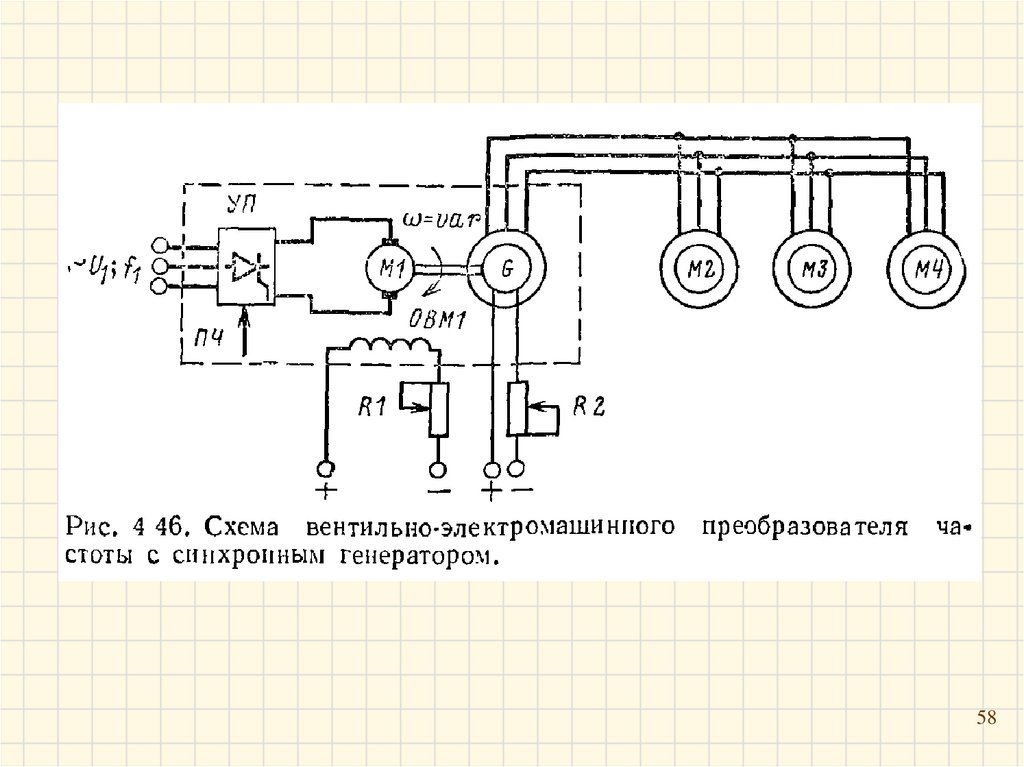
55.
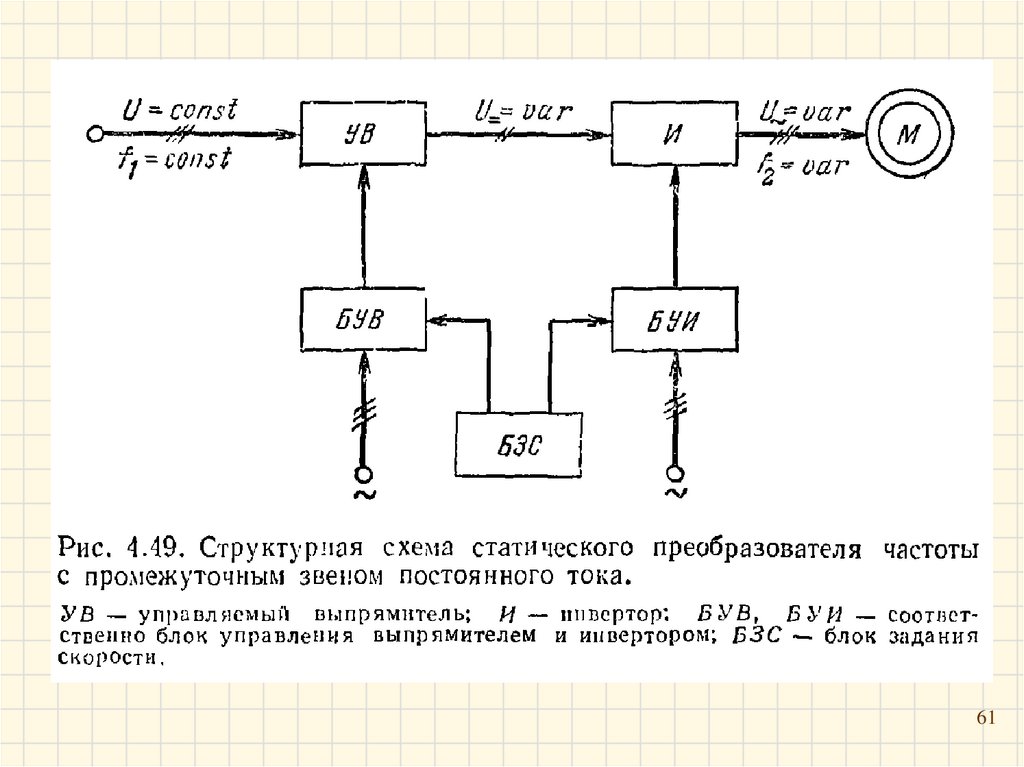
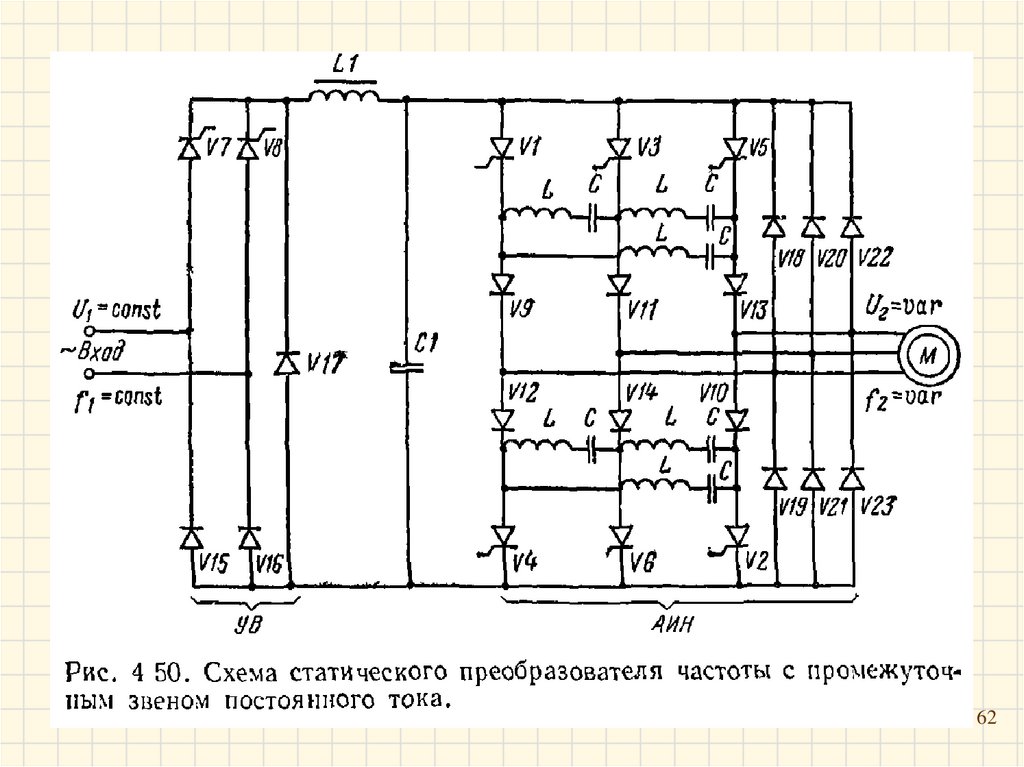
• Для осуществления частотного регулированияугловой скорости находят применение
преобразователи, на выходе которых по
требуемому соотношению или независимо
меняется как частота, так и амплитуда
напряжения.
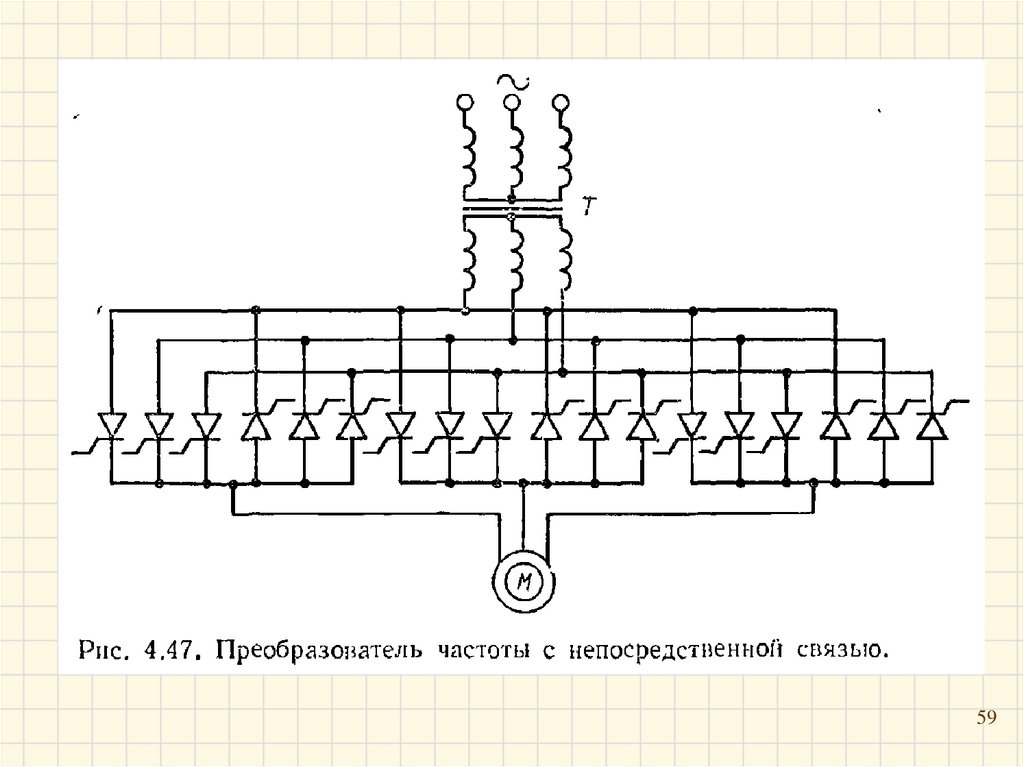
• Преобразователи частоты можно разделить на
электромашинные и вентильные.
55