

 electronics
electronicsSimilar presentations:
")







")

Принципы построения спутниковых радионавигационных систем
1. Лекция 1 Принципы построения спутниковых радионавигационных систем
1.1. Физические основы построения спутниковыхрадионавигационных систем
Основное назначение спутниковой радионавигационной системы (СРНС) состоит в обеспечении
возможности
определения
координат
и
скорости
потребителя с использованием радиосигналов. Реализация
такой
возможности
основана
на
использовании
радиомаячного способа определения координат, при
котором несколько маяков, расположенных в пространственных точках с известными координатами, излучают
радиосигналы, а потребитель, принимая и обрабатывая эти
сигналы, определяет собственные координаты и скорость.
2.
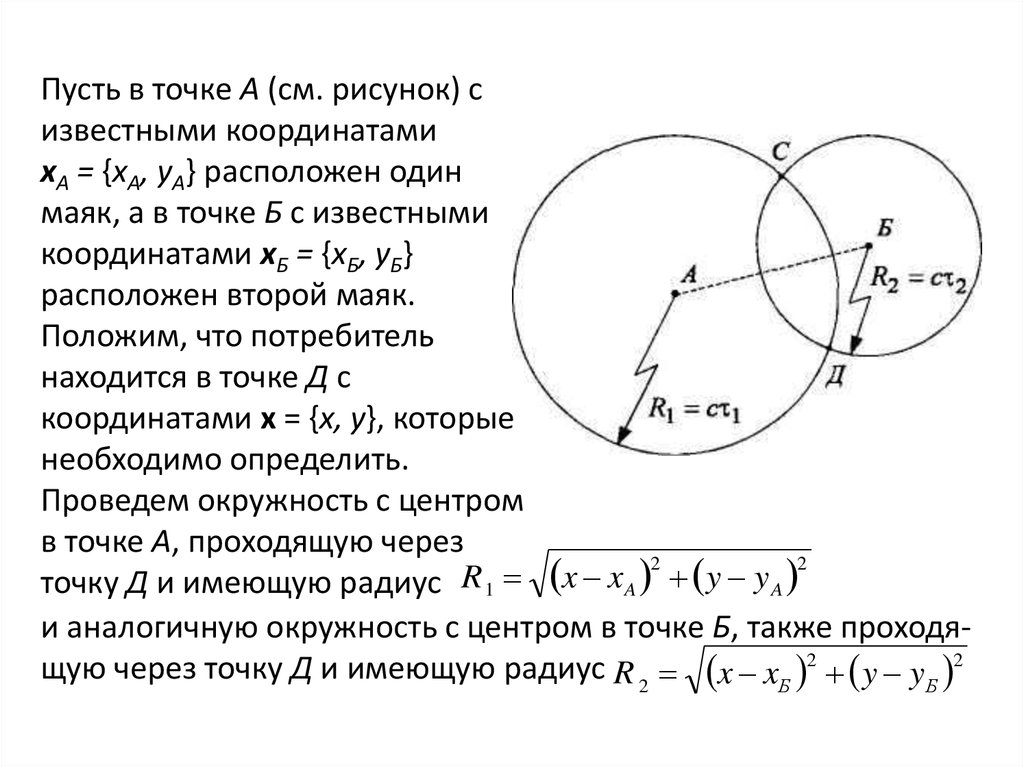
Пусть в точке А (см. рисунок) сизвестными координатами
хA = {хА, уА} расположен один
маяк, а в точке Б с известными
координатами хБ = {хБ, уБ}
расположен второй маяк.
Положим, что потребитель
находится в точке Д с
координатами х = {х, у}, которые
необходимо определить.
Проведем окружность с центром
в точке А, проходящую через
2
2
R
x
x
y
y
точку Д и имеющую радиус 1
A
A
и аналогичную окружность с центром в точке Б, также проходящую через точку Д и имеющую радиус R 2 x xБ 2 y yБ 2
3.
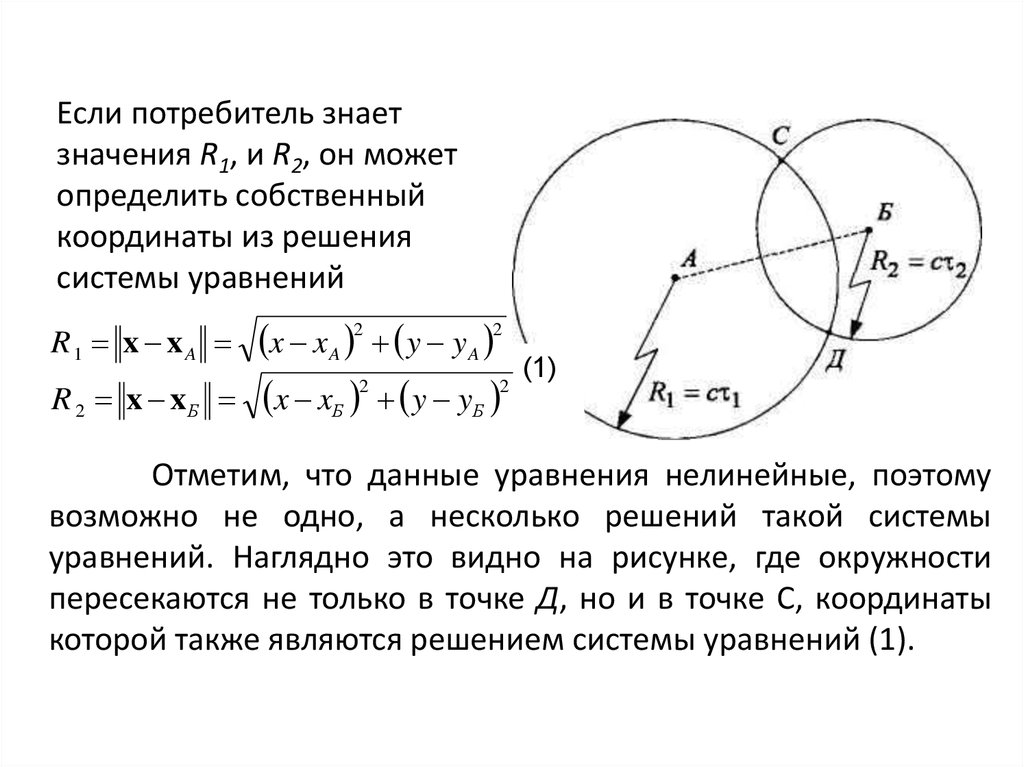
Если потребитель знаетзначения R1, и R2, он может
определить собственный
координаты из решения
системы уравнений
R1 x xA
R 2 x xБ
x xA 2 y y A 2
x xБ 2 y yБ 2
(1)
Отметим, что данные уравнения нелинейные, поэтому
возможно не одно, а несколько решений такой системы
уравнений. Наглядно это видно на рисунке, где окружности
пересекаются не только в точке Д, но и в точке С, координаты
которой также являются решением системы уравнений (1).
4.
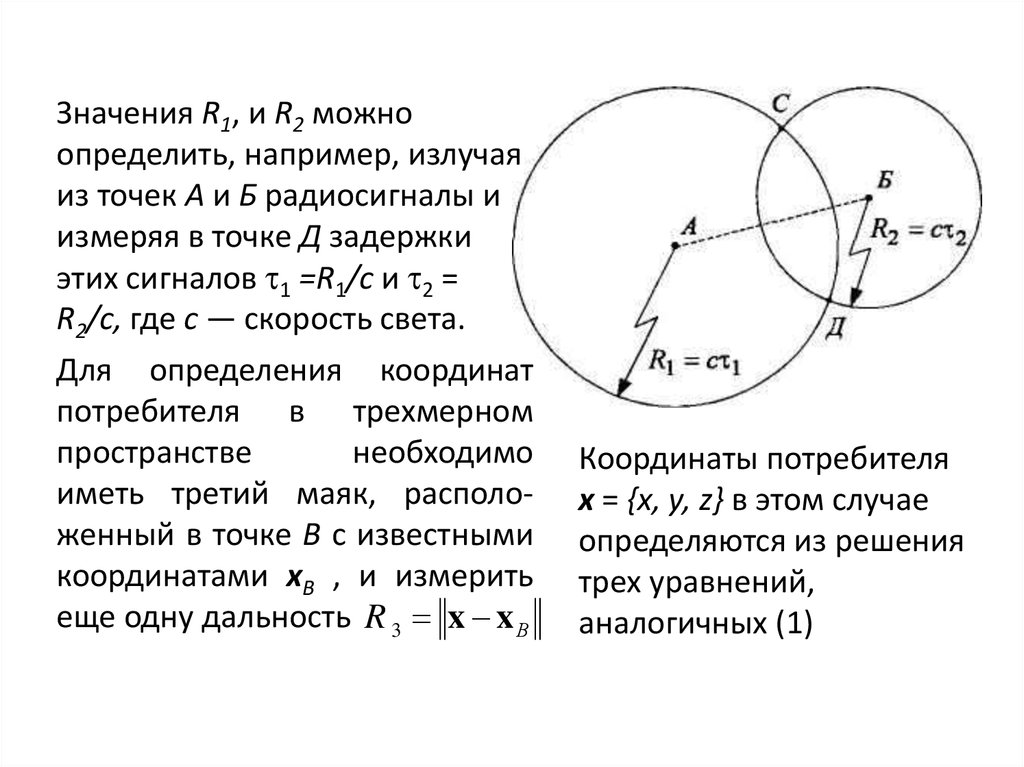
Значения R1, и R2 можноопределить, например, излучая
из точек А и Б радиосигналы и
измеряя в точке Д задержки
этих сигналов 1 =R1/c и 2 =
R2/c, где с — скорость света.
Для определения координат
потребителя в трехмерном
пространстве
необходимо
иметь третий маяк, расположенный в точке В с известными
координатами хВ , и измерить
еще одну дальность R 3 x x В
Координаты потребителя
х = {х, у, z} в этом случае
определяются из решения
трех уравнений,
аналогичных (1)
5.
В СРНС в качестве маяковвыступают навигационные
спутники (НС), с которых
излучаются радиосигналы.
Особенностью таких маяков
является то, что они
движутся. Тем не менее,
если координаты маяков
известны в любой момент
времени, то радиомаячный
способ также может быть
использован для определения координат потребителя. Однако при этом
возникает еще одна особен-
ность, связанная с тем, что
в момент излучения сигнала tи НС находится в одной
точке пространства, а в
момент приема сигнала tп и
измерения его задержки у
потребителя tп НС находится в другой точке пространства. Поэтому соотношения (1) изменяются и
должны быть записаны,
например, для определения дальности R1, в виде
R 1 tП x tП x tИ,A
(2)
6.
,Положим, что потребитель
измеряет все необходимые
дальности в один момент
времени tп , R 1 tП R 2 tП R 3 tП
Так как разные НС находятся
на разных расстояниях от
потребителя, соотношения
для R 2 tП R 3 tП
аналогичные (2), должны
быть записаны в виде
R 2 tП x tП x tИ,Б
(3)
R 3 tП x tП x tИ,В
где tИБ, tИB - время излучения сигналов из точек Б к В
соответственно,
причем такие, что в точку Д
расположения потребителя
эти сигналы приходят одновременно.
Из формул (2), (3)
следует, что для определения собственных координат потребитель должен не
только измерить дальности
R1, R2 и R3, но и знать
моменты излучения tИА, tИБ,
tИB с НС принятых сигналов,
а также координаты НС в
данные моменты времени.
7.
,В приведенных рассуждениях неявно полагалось, что
есть абсолютное время t,
которое «доступно» как
потребителю, так и на всех
НС. Однако такого абсолютного времени нет в природе. Для задания времени,
так же как и для задания
пространственных координат, необходимо вводить ту
или иную систему отсчета.
Если для задания пространственных
координат
потребителя и НС может
использоваться единая
система отсчета (пространственная система координат), то для определения
времени у потребителя и на
каждом НС вводится своя
система отсчета времени,
что
порождает
новую
проблему — согласование
(синхронизация)
данных
систем отсчета времени.
8.
Для построения СРНС необходимо:- задать систему (системы) пространственных координат;
- задать системы отсчета времени;
- задать радиосигнал, обеспечивающий возможность
определения задержки между моментом излучения и
моментом его приема;
- измерить у потребителя задержки сигналов, излученных с
разных НС, а также доплеровские смещения частот принятых
сигналов (для определения скорости потребителя);
- обеспечить у потребителя знание координат НС
x tИ,А x tИ,Б
x tИ,В
на моменты излучения сигналов tИА, tИБ, tИB (определенные в
единой системе отсчета времени);
- обеспечить синхронизацию всех используемых систем
отсчета времени.
9.
Наряду с перечисленными выше задачами, которыенеобходимо решать при построении СРНС, к ней
предъявляются дополнительные требования:
- глобальность навигационного обеспечения потребителей,
т.е. потребитель, находящийся в любой точке околоземного
пространства, должен иметь возможность определения
своих координат;
-непрерывность навигационного обеспечения, т.е. возможность определять координаты потребителя в любое время;
-неограниченность числа потребителей системы;
- высокая точность навигационно-временных определений
(НВО), под которыми понимают вычисление трех
пространственных
координат
потребителя,
трех
составляющих его вектора скорости и текущего времени.
10.
,Удовлетворение
первого
требования
обеспечивается
выбором параметров орбит
навигационных спутников и их
расположением на орбитах.
Для решения проблемы
неограниченности числа потребителей системы выбрана концепция независимой навигации, предусматривающая выполнение НВО непосредственно в аппаратуре потребителя, а
в рамках этой концепции
использован метод пассивных
(беззапросных) дальномерных
и доплеровских измерений по
сигналам нескольких НС.
Концепция независимой
навигации и пассивные измерения, дополненные непрерывным излучением сигналов с НС, решают задачу
непрерывности навигационно-временного обеспечения
потребителей.
Высокая точность НВО
достигается за счет: 1) использования сложных радиосигналов, излучаемых с НС;
2) правильного выбора рабочего созвездия НС, т.е. тех НС,
сигналы которых принимаются в обработку при НВО;
11.
,3) излучения сигналов с НС с достаточной мощностью;
4) использования высокоточной информации о параметрах
движения НС;
6) оптимизации алгоритмов обработки сигналов в аппаратуре
потребителей и рядом других факторов.
12. 1.2 Обобщенная структура спутниковой радионавигационной системы
13.
Реализация перечисленных задач и требований возможна всетевой структуре СРНС, включающей три основные
подсистемы (см. рисунок):
- подсистема космических аппаратов (ПКА), состоящая из
навигационных спутников (космический сегмент);
- подсистема контроля и управления (ПКУ) (наземный
командно-измерительный комплекс или сегмент управления);
- подсистема навигационной аппаратуры потребителей (НАП)
СРНС (сегмент потребителей).
В последнее время в структуру СРНС часто включают еще одну
подсистему, которую называют функциональным дополнением
СРНС (см. рисунок). Данная подсистема позволяет расширить
функциональные возможности СРНС и улучшить ее
потребительские характеристики.
14.
Подсистема космических аппаратовПодсистема космических аппаратов СРНС состоит из
определенного числа навигационных спутников (штатно 24 НС),
движущихся каждый по заданной орбите.
Основная функция НС — формирование и излучение радиосигналов, необходимых для навигационных определений
потребителями СРНС.
В состав аппаратуры НС включают:
-радиотехническое оборудование (передатчики навигационных
сигналов и телеметрической информации, приемники данных и
команд от ПКУ, антенны, блоки ориентации),
-ЭВМ,
-бортовой эталон времени и частоты (БЭВЧ),
-солнечные батареи и т. д.
15.
Подсистема контроля и управленияНаземная подсистема контроля и управления выполняет
следующие основные задачи:
- высокоточное измерение и прогноз параметров орбитального
движения НС;
- частотно-временное обеспечение НС, включая задачи
синхронизации систем отсчета времени;
- мониторинг радионавигационного поля (радионавигационных
сигналов всех НС);
- радиотелеметрический мониторинг НС (контроль состояния
бортовой аппаратуры);
- командное и программное радиоуправление
функционированием НС.
16.
,Процедуру определения и
прогноза параметров движения всех НС с помощью
наземных средств и передачу
этой информации («закладка»)
на НС с целью ее последующей
передачи потребителям принято называть эфемеридным
обеспечением.
Частотно-временное обеспечение означает определение
и прогноз отклонений бортовых шкал времени НС от системной шкалы времени и «закладка» на борт НС частотновременных поправок (ЧВП) с
целью
последующей
их
передачи потребителям.
Излучаемые с НС непрерывные радиосигналы образуют в околоземном пространстве радионавигационное
поле. Мониторинг радионавигационного поля в ПКУ осуществляется с целью обеспечения потребителей навигационными радиосигналами гарантированного качества, реализующими требуемую точность НВО. При выявлении сигналов НС, не удовлетворяющих заданным требованиям, принимаются меры по выявлению и устранению возникших дефектов
или
исключению
этих
17.
Навигационная аппаратура потребителейНавигационная аппаратура потребителей предназначена для
приема и обработки радиосигналов НС с целью определения
необходимой потребителям информации (пространственновременные координаты, направление и скорость,
пространственная ориентация и т. п.).
В состав НАП входят:
-антенна с равномерной диаграммой направленности в
верхнюю полусферу;
- высокочастотный приемник, осуществляющий фильтрацию
навигационных сигналов,
- вычислитель, решающий задачу НВО.
18.
Обычно используют двухэтапное решение задачиНВО.
На первом этапе формируют
оценки параметров
радиосигнала - задержки и
доплеровского смешения
частоты, и извлекают из
сигнала навигационные
данные, содержащие, в том
числе информацию о
параметрах движения НС.
На втором этапе
рассчитывают координаты
потребителя и составляющие
его вектора скорости.
В зависимости от типа НАП
(носимая человеком,
авиационная, морская,
автомобильная, геодезическая
и т.д.) в ней реализуются
дополнительные сервисные
функции, например, привязка
к карте местности, движение
по заданному маршруту,
определение положения
потребителя относительно
заданной точки и др.