





















")










 electronics
electronicsSimilar presentations:










Радионавигационные системы
1. 7 Радионавигационные системы
12.
Бортовые радионавигационные системы:- радиотехнические системы ближней навигации (РСБН);
- комплексная радионавигационная система, включающая в себя
всенаправленный азимутальный радиомаяк (VOR) и
всенаправленный дальномерный маяк (DME);
- автоматический радиокомпас (АРК);
- курсо-глиссадные системы или инструментальные системы захода
на посадку (ILS, ПРМГ);
- радиотехнические системы дальней навигации (РСДН);
- радиовысотомеры малых и больших высот (РВ);
- доплеровские измерители скорости и угла сноса (ДИСС).
2
3. Радиосистемы ближней навигации
34.
Назначение радиосистем ближней навигации –определение местоположения самолета на расстояниях до
400 километров от радионавигационных точек. Основаны
на угломерных и дальномерных измерениях.
4
5. Назначение радиосистем ближней навигации
Определение азимута ЛА относительнорадиомаяка.
Определение наклонной дальности от ЛА
до радиомаяка.
Определение местоположения самолета по
азимуту и наклонной дальности –
пересечение линии равных азимутов (прямая)
и линии равных дальностей (окружность).
Навигационные параметры:
D = (x2 + y2 + z2)1/2
A = arctg( z/x ), при 0<x, 0<z
Здесь
Ox – ось координат, направленная на север
Oy –ось координат, направленная вверх
Oz – ось координат, направленная на восток
5
6. Радиосистемы ближней навигации
Отечественная система РСБН – определение местоположения самолета, приводсамолета в заданную точку в пределах зоны действия системы, наземное
наблюдение воздушной обстановки.
VOR/DME (VHF Omnidirectional Radiobeacon/Distance Measuring Equipment) –
определение местоположения самолета, привод самолета в заданную точку в
пределах зоны действия системы. Стандартное средство ближней навигации на
зарубежных воздушных линиях. Азимутальный (VOR) и дальномерный (DME)
радиомаяки используются и как самостоятельные средства навигации, образуя
соответственно угломерные или дальномерные системы.
6
7.
Радиосистема РСБН7
8.
Радиосистема VOR/DME8
9. Принцип действия дальномерного канала РСБН
1 – запрос дальности,2 – прием запроса дальности,
3 – ответ дальности,
4 – прием ответа дальности, tа.з. – аппаратурная задержка сигнала в радиомаяке,
tD – измеряемое время.
9
10. Принцип действия азимутального канала РСБН
Диаграмма направленности азимутальной антенны в горизонтальной плоскости10
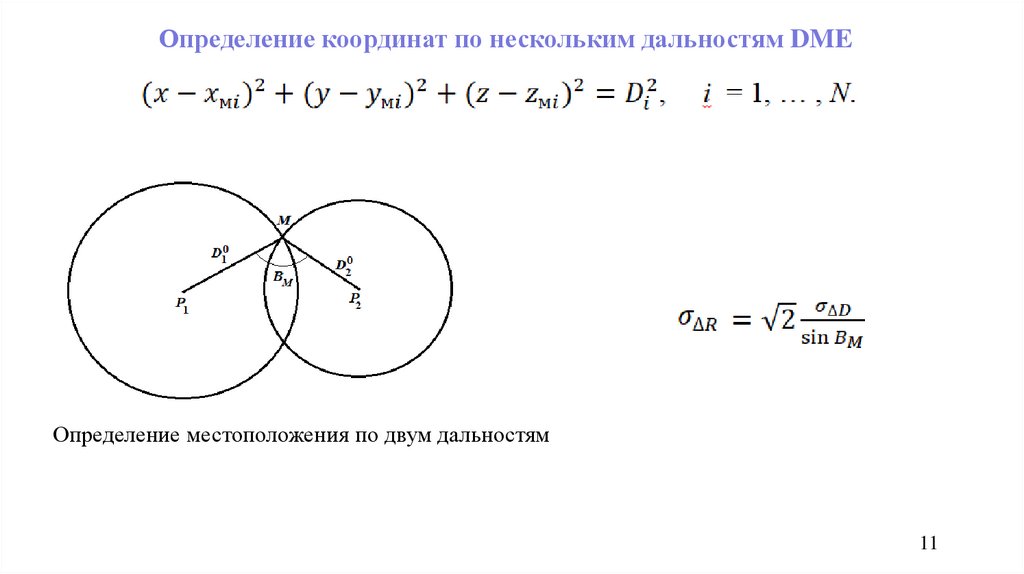
11.
Определение координат по нескольким дальностям DMEОпределение местоположения по двум дальностям
11
12. Основные причины погрешностей радиосистем ближней навигации
1. Помехи, поступающие на вход бортового приемника Случайные погрешности,вызванные внешними помехами.
2. Погрешности, вызванные дестабилизирующими факторами Отражения
радиосигналов от местных объектов, попадающих одновременно с самолетом в пределы
области диаграммы направленности азимутального канала. Изменение принимаемого
сигнала при отражении от земной поверхности.
3. Аппаратурные погрешности измерителя времени Наибольшее влияние оказывают на
точность определения дальности.
12
13.
Оценивание РСБН в летных испытанияхПример оценивания погрешности А азимута РСБН
13
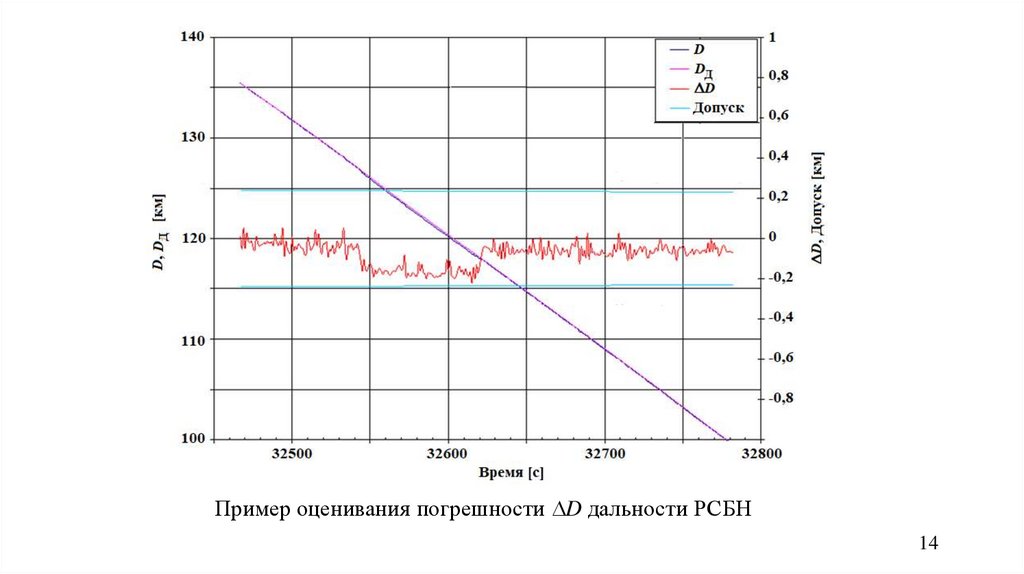
14.
Пример оценивания погрешности D дальности РСБН14
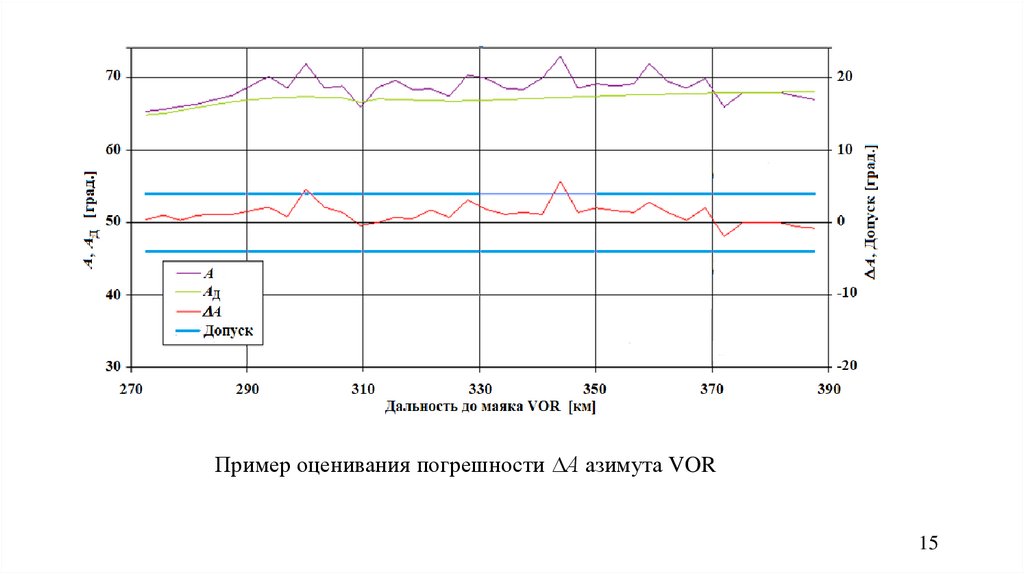
15.
Пример оценивания погрешности А азимута VOR15
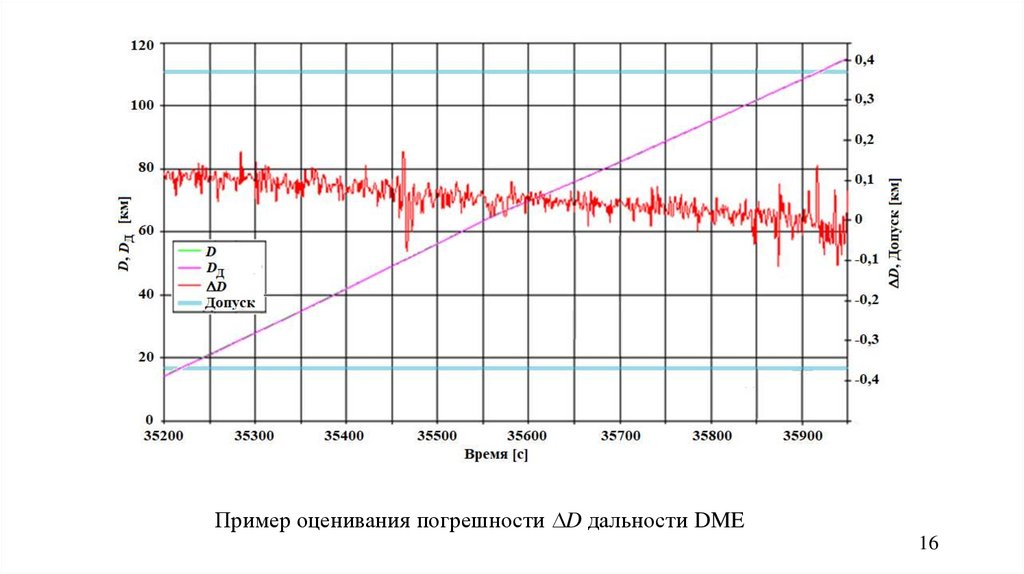
16.
Пример оценивания погрешности D дальности DME16
17. Радиотехнические системы посадки
1718.
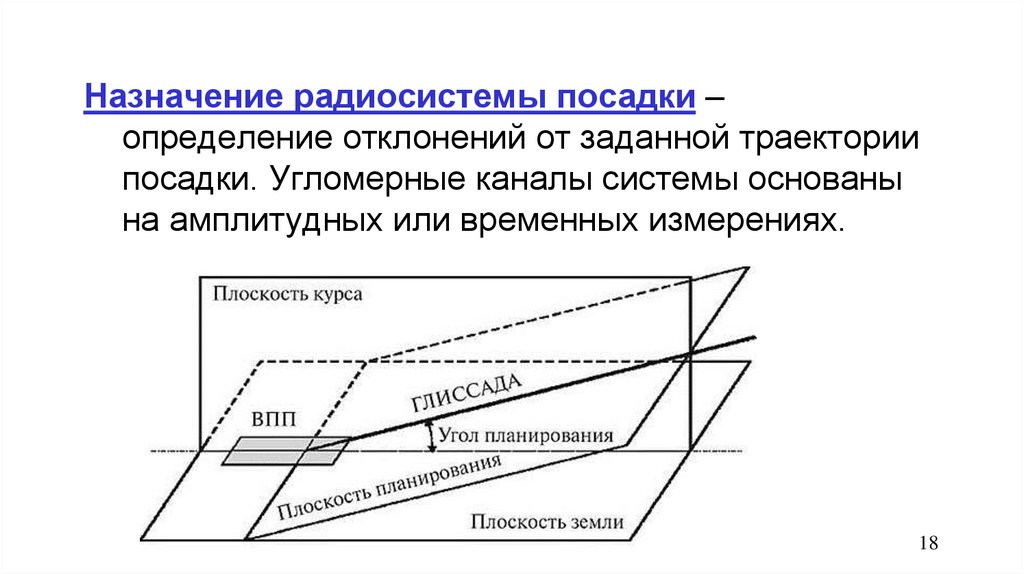
Назначение радиосистемы посадки –определение отклонений от заданной траектории
посадки. Угломерные каналы системы основаны
на амплитудных или временных измерениях.
18
19. Типы радиомаячных систем посадки
-Метрового диапазона ILS (Instrument Landing System),
Метрового диапазона СП-50
Дециметрового диапазона ПРМГ (посадочная радиомаячная группа)
Сантиметрового диапазона MLS (Microwave Landing System)
19
20. Курсовой радиомаяк ILS
2021. Глиссадный радиомаяк ILS
2122.
Схема функционирования курсового и глиссадного радиомаяков ILS22
23.
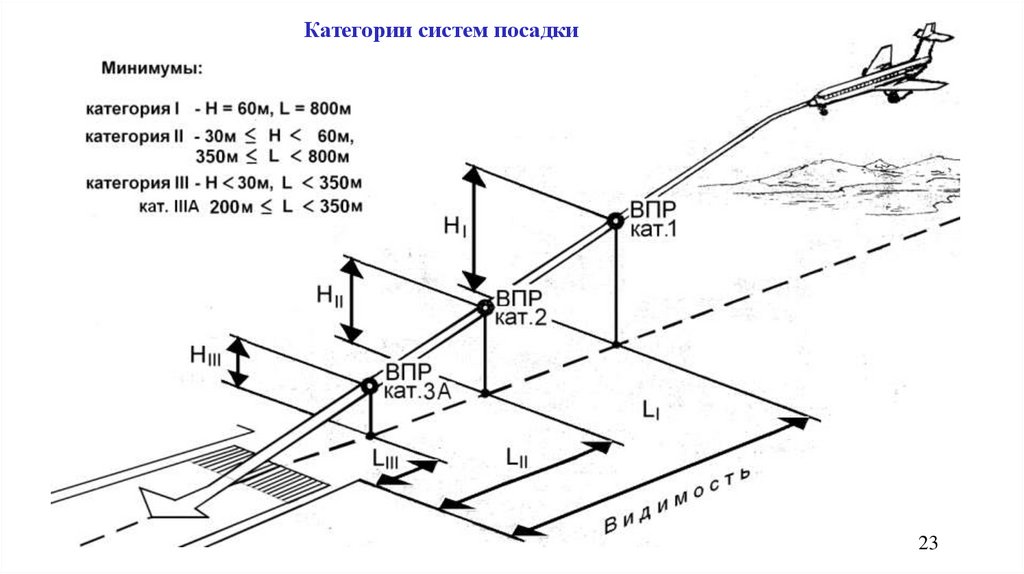
Категории систем посадки23
24.
2425.
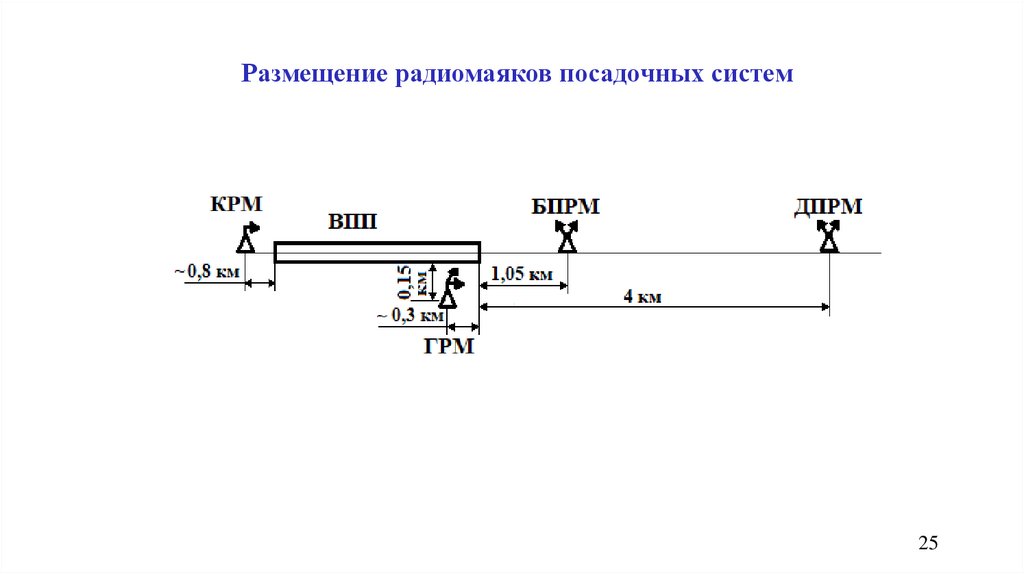
Размещение радиомаяков посадочных систем25
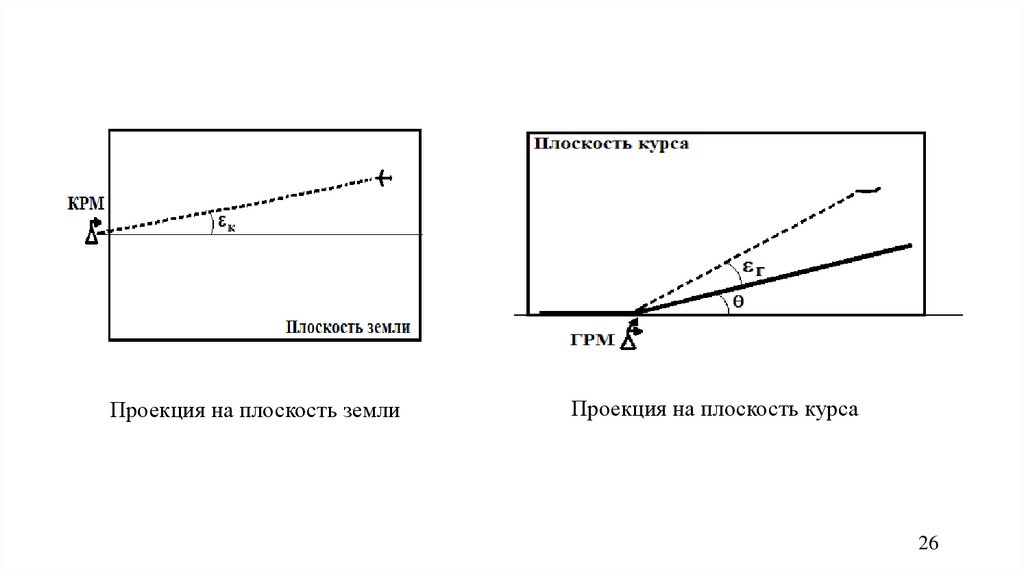
26.
Проекция на плоскость землиПроекция на плоскость курса
26
27.
РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ ПОСАДКИВ комплекс ПНК могут входить приемники систем ILS/СП-50 и РСБН, работающие в
режиме «посадка» для обеспечения посадки самолетов в сложных метеоусловиях по
наземным радиотехническим маякам инструментальных средств: метрового диапазона ILS,
СП-50 или дециметрового диапазона ПРМГ, работающих в диапазонах радиоволн
- ILS/СП-50 - 108,10…..111,9 МГц для курсового канала, 328,6…335,4 МГц для глиссадного
канала, 75 МГц для маркерного канала;
- ПРМГ – 905.1…932.4 МГц для курсового канала, 939.6…966.9 МГц для глиссадного канала
и 939.6…966.9 для дальномерного канала.
Системы ILS и СП-50 состоят из курсовых (КРМ), глиссадных (ГРМ) и маркерных (МРМ)
радиомаяков и соответствующих им бортовых приемников с каналами курса, глиссады и
маркера.
•Курсовые и глиссадные радиомаяки ILS работают на 40 частотных каналах, СП-50 на 20
частотных каналах
•Маркерные радиомаяки размещаются вдоль продолжения оси ВПП со стороны захода на
посадку и служат источником информации экипажу о расстоянии до ВПП.
Система ПРМГ состоит из курсовых (КРМ), глиссадных (ГРМ) и дальномерных (РД)
радиомаяков и соответствующих им бортовых приемников с каналами курса, глиссады и
дальности.
•Курсовые и глиссадные радиомаяки ПРМГ работают на 40 частотных каналах
27
•Информация о дальности приводится к посадочному порогу ВПП.
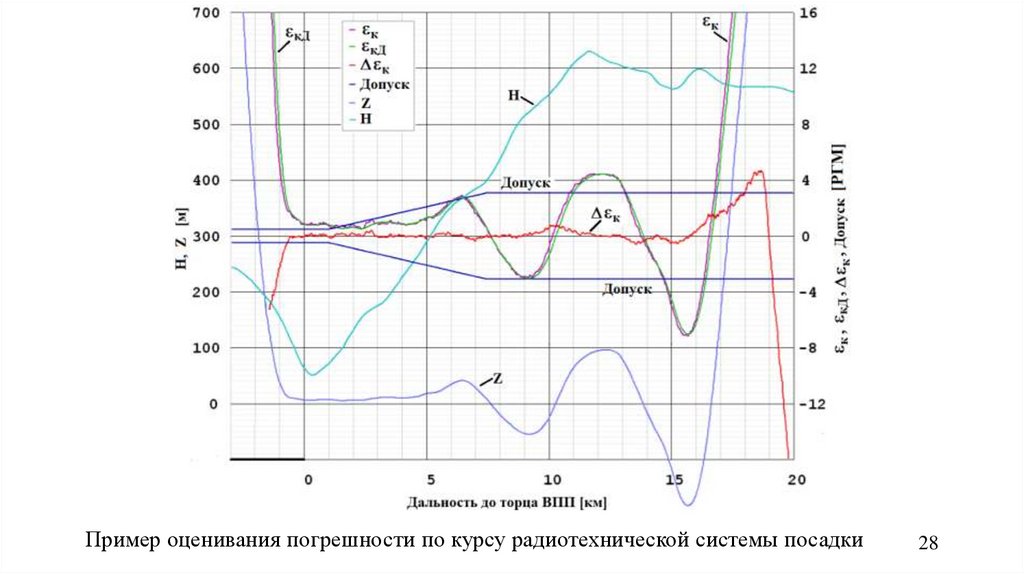
28.
Пример оценивания погрешности по курсу радиотехнической системы посадки28
29.
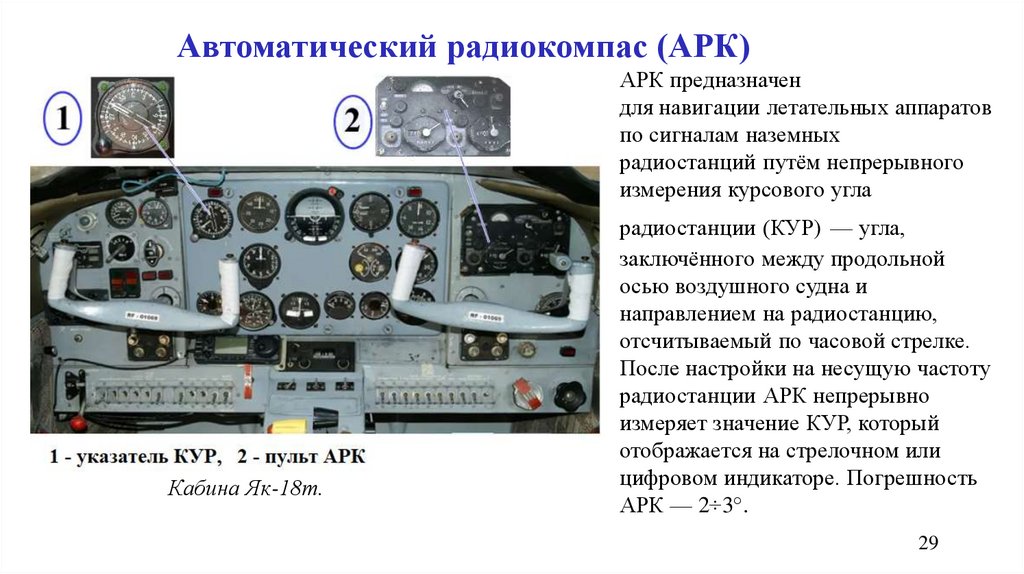
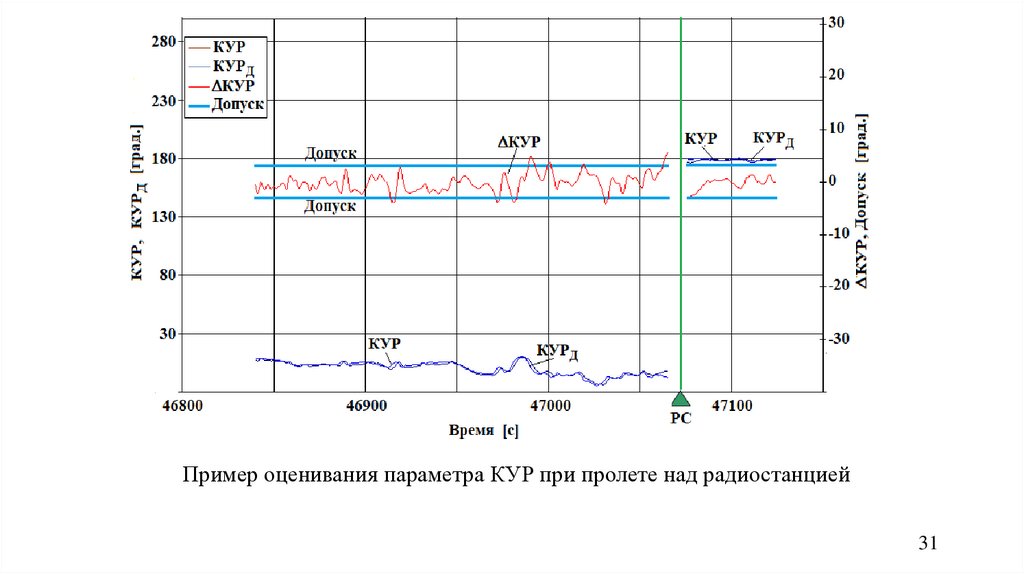
Автоматический радиокомпас (АРК)АРК предназначен
для навигации летательных аппаратов
по сигналам наземных
радиостанций путём непрерывного
измерения курсового угла
Кабина Як-18т.
радиостанции (КУР) — угла,
заключённого между продольной
осью воздушного судна и
направлением на радиостанцию,
отсчитываемый по часовой стрелке.
После настройки на несущую частоту
радиостанции АРК непрерывно
измеряет значение КУР, который
отображается на стрелочном или
цифровом индикаторе. Погрешность
АРК — 2÷3°.
29
30. Автоматический радиокомпас
3031.
Пример оценивания параметра КУР при пролете над радиостанцией31
32.
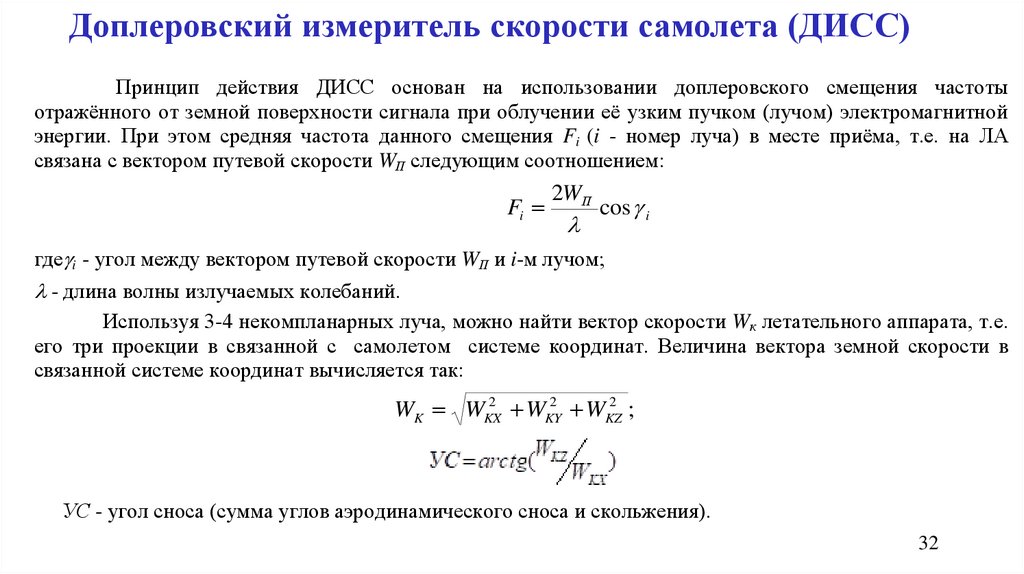
Доплеровский измеритель скорости самолета (ДИСС)Принцип действия ДИСС основан на использовании доплеровского смещения частоты
отражённого от земной поверхности сигнала при облучении её узким пучком (лучом) электромагнитной
энергии. При этом средняя частота данного смещения Fi (i - номер луча) в месте приёма, т.е. на ЛА
связана с вектором путевой скорости WП следующим соотношением:
Fi
2WП
cos i
где i - угол между вектором путевой скорости WП и i-м лучом;
- длина волны излучаемых колебаний.
Используя 3-4 некомпланарных луча, можно найти вектор скорости Wк летательного аппарата, т.е.
его три проекции в связанной с самолетом системе координат. Величина вектора земной скорости в
связанной системе координат вычисляется так:
2
2
2
WK WKX
WKY
WKZ
;
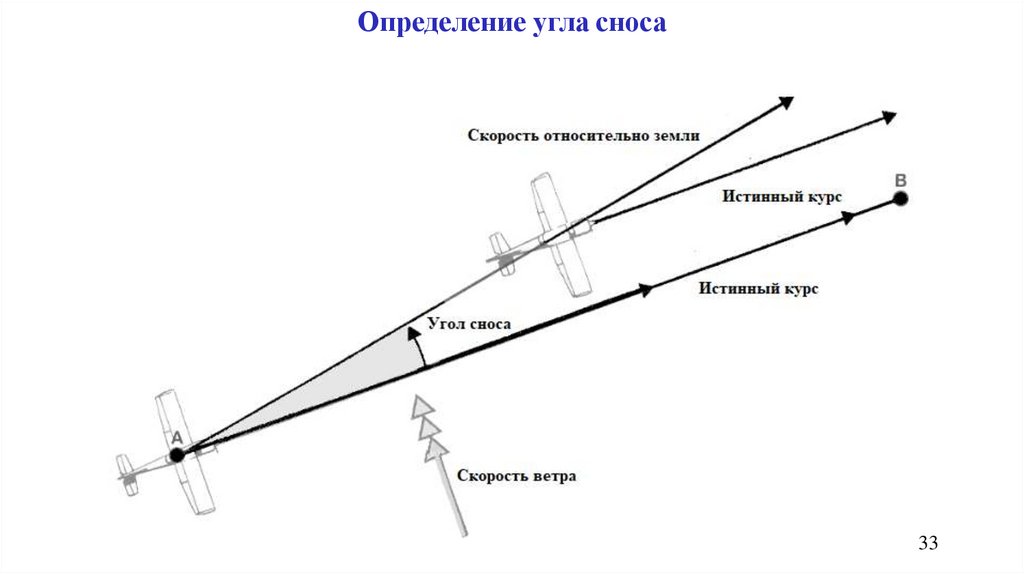
УС - угол сноса (сумма углов аэродинамического сноса и скольжения).
32
33.
Определение угла сноса33
34.
Погрешности параметров ДИСС на участке полета34
35.
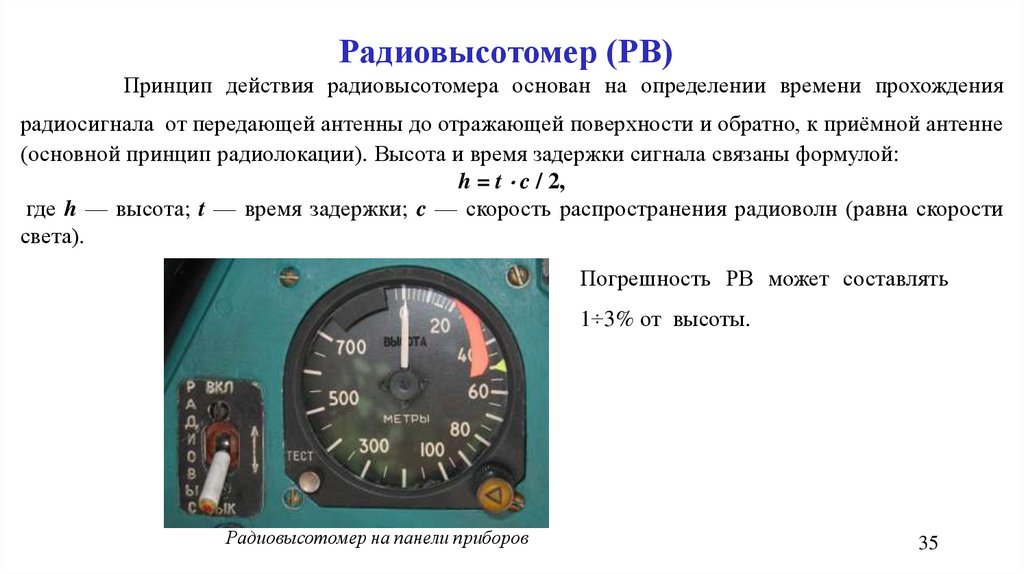
Радиовысотомер (РВ)Принцип действия радиовысотомера основан на определении времени прохождения
радиосигнала от передающей антенны до отражающей поверхности и обратно, к приёмной антенне
(основной принцип радиолокации). Высота и время задержки сигнала связаны формулой:
h = t ⋅ c / 2,
где h — высота; t — время задержки; c — скорость распространения радиоволн (равна скорости
света).
Погрешность РВ может составлять
1÷3% от высоты.
Радиовысотомер на панели приборов
35
36.
Погрешности высоты радиовысотомера36
37. Радиотехнические системы дальней навигации
Определение положения ЛА с помощью станций РСДН37
38. Примеры радиотехнических систем дальней навигации
OMEGA – фазовая радионавигационная система (США).АЛЬФА (Маршрут) – фазовая радионавигационная система (Россия).
LORAN-С (long range navigation) – импульсно-фазовая разностно-дальномерная
система (США).
«ЧАЙКА» – импульсно-фазовая разностно-дальномерная система (Россия).
38
39. Фазовая радионавигационная система АЛЬФА (Маршрут)
Состоит из 4 станций: Комсомольск-на-Амуре, Новосибирск, Краснодар, пос. Ревда(Мурманская область)
Формат сигналов, излучаемых
станциями
Рабочие частоты:
F =11,9 кГц,
F1=12,6 кГц,
F2=14,9 кГц
3
Длительности излучаемых посылок
одинаковы и равны 0,4 с, период
повторения сигналов 3,6 с
39
40. Расположение наземных станций и зона покрытия системы АЛЬФА
4041. Расположение наземных станций и зона покрытия системы OMEGA
4142. Импульсно-фазовые радионавигационные системы
Станции работают группами, каждая из групп образует цепь станций. Цепь включает в себя однуведущую и 2 – 5 ведомых станций.
Длина баз пар станций (ведущая – ведомая) 550 – 1500 км.
Рабочая частота 100 кГц.
Погрешность определения координат 200 – 600 м, зависит от геометрического расположения наземных
станций и приемника в рабочей зоне цепи.
Геометрический фактор:
sin 2
Г
12
2
2 2 sin
sin 2
12
2
23
sin
2
sin 2
23
2
sin
31
2
31
2
При удалении потребителя от ведущей станции 3 за
линию 1-2, геометрический фактор возрастает и точность
координат уменьшаться. Наименьший геометрический
фактор имеет место в центре треугольника 1-2-3 и равен
1,22. На краю рабочей зоны геометрический фактор
максимален и равняется 4..5.
42
43. Устранение фазовой неоднозначности в системах LORAN-C и «Чайка»
Измерения производится импульсно-фазовым методом: грубое измерение разности дальностей основанона оценке интервала времени между приходом импульсов ведущей и ведомых станций, а точное - на
оценке разности фаз несущих колебаний тех же импульсов.
Последовательности пакетов радио- импульсов станций
цепи
Ведущая станция А излучает 9 импульсов,
восемь из которых отстоят друг от друга на
1000 мкс, а девятый, отстоит от восьмого 1800
мкс . Этот сигнал распространяется как к
потребителю, так и к приемным устройствам
ведомых станций. Принятые на ведомых
станциях сигал задерживается на
определенное для этой станции время
(кодовая задержка) и затем излучается в эфир.
43
44. Зона покрытия систем LORAN-С и «Чайка»
4445. Основные характеристики радиосистем дальней навигации
ПараметрLORAN-C
«Чайка»
OMEGA
АЛЬФА
Дальность, км
до 2600
до 12000
Погрешность, км
0,2 ÷ 0,6
3,7
Диапазон частот
100 кГц
10 ÷ 14 кГц
45
46. Основные причины погрешностей радиосистем дальней навигации
1. Помехи, поступающие на вход бортового приемника. Наибольшая погрешность связана сатмосферными помехами.
2. Отражение радиоволн систем дальней навигации от верхнего слоя ионосферы.
Радиоволны распространяются не только вдоль поверхности Земли (поверхностная волна),
но и отражаются от нижнего слоя ионосферы (пространственная волна). Интерференция
поверхностной и пространственной радиоволн приводит к искажению принимаемых
сигналов.
3. Непостоянство фазовой скорости распространения поверхностной волны. Изменение
скорости связано с разной проводимостью и диэлектрической проницаемостью
подстилающей поверхности.
46
47.
Оценка сигналов отклонений от глиссады ILS в летных испытаниях0.8
150
0.6
Ег; Ег эт.; erЕг, Допуски, [град]
n=190
m=0.023
б=0.017
m+2б=0.057
Ег, гр.
Ег эт, гр.
Допуск
Допуск
erЕг, гр
Z, м
Высота [м]
0.5
0.4
0.3
100
Допуск 0.14 град
0.2
0.1
0
0
-0.1 ГРМ
-0.2
50
Допуск 0.065 град ( II и III категори)
0
0
0
м
БПРС
Допуск -0.14град
ДПРС
-50
-0.3
Высота, Z, [м]; Время, с
0.7
Sкг=0,27 РГМ/град. -крутизна
характеристики линии глиссады
-0.4
-0.5
-100
-0.6
с
-0.7
-0.8
4000
6000
8000
10000
12000
14000
16000
-150
18000
20000
Дальность до КРМ [м]
Рис. . ИЛ-96-300. 28.06.05г. Погрешность линии глиссады ILS -85 с ГРМ СП-90. Раменское
47
48.
Оценка азимута VIM в летных испытаниях10
Азимут
n=2248
m=-0.088град
б=0.73град
|m|+2б=1.55град
Н=6000...678м
8
6
220
Допуск 2,7 град
4
2
170
0
-2
120
Допуск -2,7 град
-4
Погрешность Аз, допуск Аз[град]
Азимут, азимут эт. [град., удаление., км.
270
Азимут1
Азимут эт
Дальность
errAz1
Допуск Az
Допуск Az
-6
70
-8
20
70000
70500
71000
71500
72000
-10
72500
Время [с]
48
49.
Оценка измерений высоты РВ в летных испытаниях800
600
РВ1
n=13
m=13,77 м
б=3,04м
|m|+2б=19м
Допуск
Допуск
80
60
40
500
20
Допуск 2%Н
400
0
300
-20
200
Допуск -10%Н
100
Допуск -2%Н
Погр., м; Танг., Крен [град], допуски, Z, м
Высота РВ; Нэт, [м]
700
Нрв
Нэт
Z
Танг
Крен
erHрв1
РВ1
n=64
m=-1,77 м
б=3,44м
|m|+2б=8,5м
-40
ВПП
0
2000
-60
4000
Рис.
6000
8000
10000
12000
14000
. Ту-234. 10.09.04. Погрешности измерения высоты РВ-85. Реж. 1.
16000
18000
Дальность [м]
49
50.
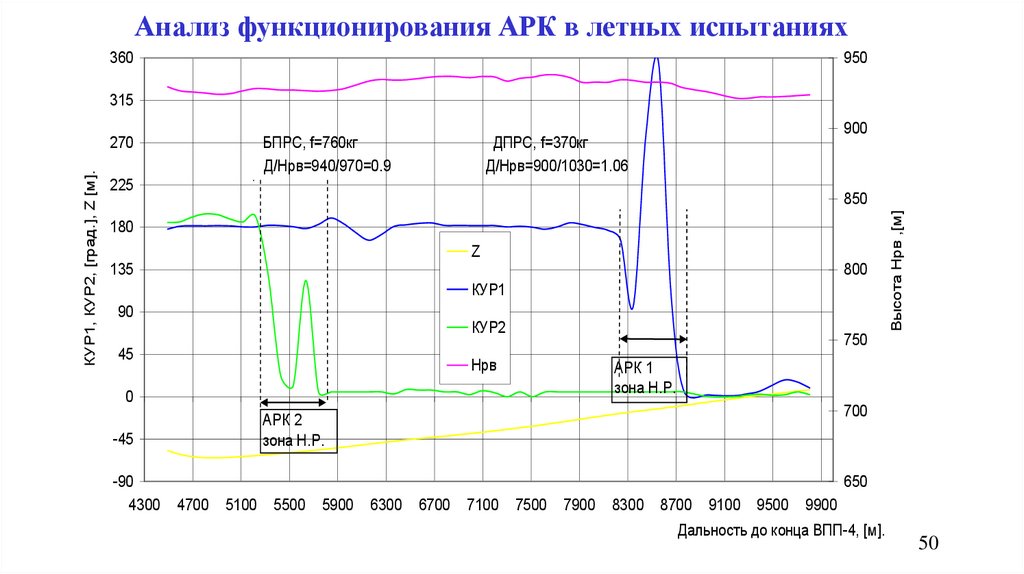
Анализ функционирования АРК в летных испытаниях360
950
315
БПРС, f=760кг
Д/Нрв=940/970=0.9
900
ДПРС, f=370кг
Д/Нрв=900/1030=1.06
225
850
180
Z
135
800
КУР1
90
КУР2
45
750
Hрв
АРК 1
зона Н.Р.
0
-90
4300
700
АРК 2
зона Н.Р.
-45
Высота Hрв ,[м]
КУР1, КУР2, [град.], Z [м].
270
650
4700
5100
5500
5900
6300
6700
7100
7500
7900
8300
8700
9100
9500
9900
Дальность до конца ВПП-4, [м].
Рис. . Ту-334. 19.03.03г. Зона неустойчивой работы АРК-25. Раменское.
50