
 electronics
electronicsSimilar presentations:





")
")



Общие сведения о спутниковых радионавигационных системах
1.
«Системы позиционирования подвижных объектов»Тема №5. Принципы построения и функционирования спутниковых радионавигационных систем.
Занятие №1. Общие сведения о спутниковых радионавигационных системах.
1
2.
ВОПРОСЫ ЗАНЯТИЯ:1. Краткая характеристика спутниковых радионавигационных систем первого поколения.
2. Классификация и структура СРНС.
3. Общие особенности построения современных СРНС.
ЛИТЕРАТУРА:
1. Радиотехнические системы. Под ред. Ю.М. Казаринова. М.: Высшая школа, 1990.
2. Яценков В. С. Основы спутниковой навигации. Системы GPS NAVSTAR и ГЛОНАСС. - М: Горячая
линия-Телеком, 2005. - 272 с.: ил.
3. ГЛОНАСС. Принципы noстроения и функционирования / Под ред. А.И. Перова. В.Н. Харисова.
Изд. 4-е, перераб. и доп. - М.: Радиотехника, 2010.
4. https://glonass-iac.ru/guide/glonass.php
3.
Спутниковые радионавигационные системы (СРНС) предназначены для глобальной оперативной навигацииприземных подвижных объектов (наземных, воздушных, морских и низкорбитальных космических). Их работа
базируется на использовании координированной по движению и излучению сигналов сети навигационных
искусственных спутников Земли (НС, НКА), являющихся движущимися радиомаяками с известными на момент
измерения координатами.
Основные навигационные задачи, решаемые с помощью современных РНС:
• непрерывное и мгновенное определение местоположения ПО и составляющих вектора скорости его движения в
заданной системе координат;
определение ориентации ПО в пространстве;
взаимная синхронизация эталонов частоты (времени), установленных на удаленных объектах;
взаимная высокоточная геодезическая привязка удаленных объектов;
сбор и передача информации для спасения терпящих бедствие объектов;
другие задачи (в горном деле, строительстве, сельском хозяйстве, логистике, военном деле и др.).
СРНС принято разделять на два поколения: первое - СРНС, развернутые в 1960-1970 годы и 2-е, развернутые в 1980-90-е годы.
3
4.
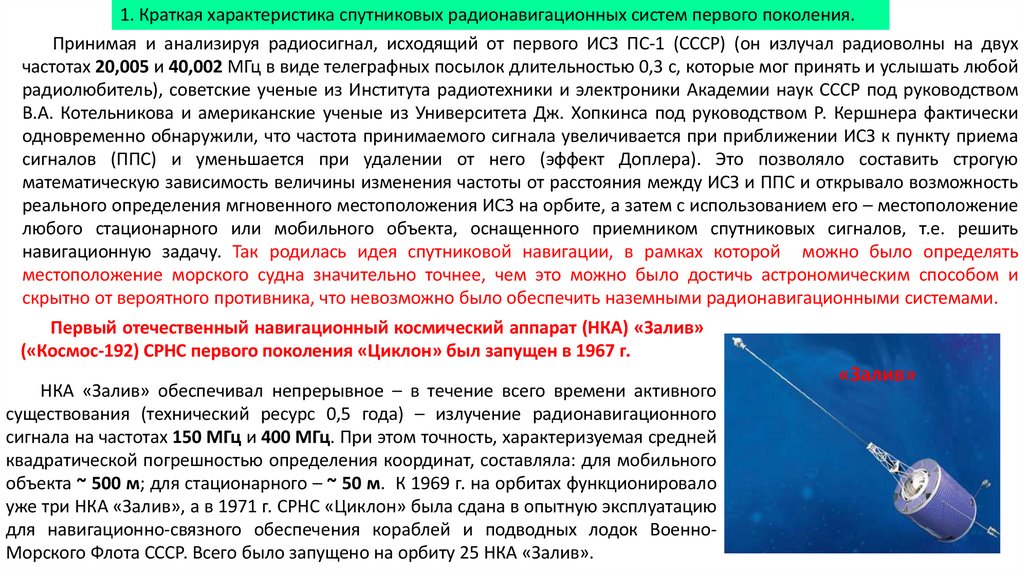
1. Краткая характеристика спутниковых радионавигационных систем первого поколения.Принимая и анализируя радиосигнал, исходящий от первого ИСЗ ПС-1 (СССР) (он излучал радиоволны на двух
частотах 20,005 и 40,002 МГц в виде телеграфных посылок длительностью 0,3 с, которые мог принять и услышать любой
радиолюбитель), советские ученые из Института радиотехники и электроники Академии наук СССР под руководством
В.А. Котельникова и американские ученые из Университета Дж. Хопкинса под руководством Р. Кершнера фактически
одновременно обнаружили, что частота принимаемого сигнала увеличивается при приближении ИСЗ к пункту приема
сигналов (ППС) и уменьшается при удалении от него (эффект Доплера). Это позволяло составить строгую
математическую зависимость величины изменения частоты от расстояния между ИСЗ и ППС и открывало возможность
реального определения мгновенного местоположения ИСЗ на орбите, а затем с использованием его – местоположение
любого стационарного или мобильного объекта, оснащенного приемником спутниковых сигналов, т.е. решить
навигационную задачу. Так родилась идея спутниковой навигации, в рамках которой можно было определять
местоположение морского судна значительно точнее, чем это можно было достичь астрономическим способом и
скрытно от вероятного противника, что невозможно было обеспечить наземными радионавигационными системами.
Первый отечественный навигационный космический аппарат (НКА) «Залив»
(«Космос-192) СРНС первого поколения «Циклон» был запущен в 1967 г.
НКА «Залив» обеспечивал непрерывное – в течение всего времени активного
существования (технический ресурс 0,5 года) – излучение радионавигационного
сигнала на частотах 150 МГц и 400 МГц. При этом точность, характеризуемая средней
квадратической погрешностью определения координат, составляла: для мобильного
объекта ~ 500 м; для стационарного – ~ 50 м. К 1969 г. на орбитах функционировало
уже три НКА «Залив», а в 1971 г. СРНС «Циклон» была сдана в опытную эксплуатацию
для навигационно-связного обеспечения кораблей и подводных лодок ВоенноМорского Флота СССР. Всего было запущено на орбиту 25 НКА «Залив».
«Залив»
5.
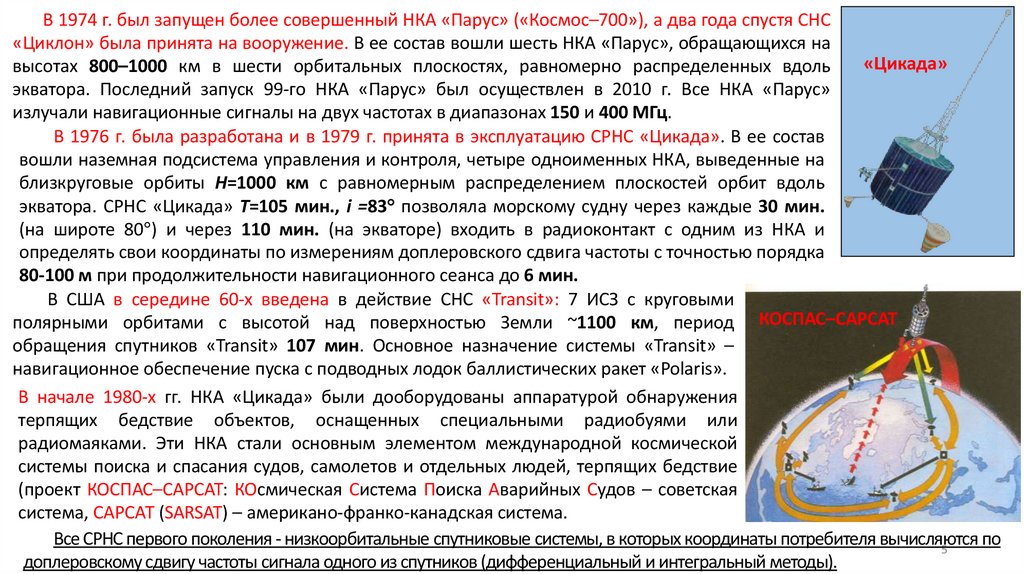
В 1974 г. был запущен более совершенный НКА «Парус» («Космос–700»), а два года спустя СНС«Циклон» была принята на вооружение. В ее состав вошли шесть НКА «Парус», обращающихся на
«Цикада»
высотах 800–1000 км в шести орбитальных плоскостях, равномерно распределенных вдоль
экватора. Последний запуск 99-го НКА «Парус» был осуществлен в 2010 г. Все НКА «Парус»
излучали навигационные сигналы на двух частотах в диапазонах 150 и 400 МГц.
В 1976 г. была разработана и в 1979 г. принята в эксплуатацию СРНС «Цикада». В ее состав
вошли наземная подсистема управления и контроля, четыре одноименных НКА, выведенные на
близкруговые орбиты Н=1000 км с равномерным распределением плоскостей орбит вдоль
экватора. СРНС «Цикада» Т=105 мин., i =83° позволяла морскому судну через каждые 30 мин.
(на широте 80°) и через 110 мин. (на экваторе) входить в радиоконтакт с одним из НКА и
определять свои координаты по измерениям доплеровского сдвига частоты с точностью порядка
80-100 м при продолжительности навигационного сеанса до 6 мин.
В США в середине 60-х введена в действие СНС «Transit»: 7 ИСЗ с круговыми
полярными орбитами с высотой над поверхностью Земли ~1100 км, период КОСПАС–САРСАТ
обращения спутников «Transit» 107 мин. Основное назначение системы «Transit» –
навигационное обеспечение пуска с подводных лодок баллистических ракет «Polaris».
В начале 1980-х гг. НКА «Цикада» были дооборудованы аппаратурой обнаружения
терпящих бедствие объектов, оснащенных специальными радиобуями или
радиомаяками. Эти НКА стали основным элементом международной космической
системы поиска и спасания судов, самолетов и отдельных людей, терпящих бедствие
(проект КОСПАС–САРСАТ: КОсмическая Система Поиска Аварийных Судов – советская
система, САРСАТ (SARSAT) – американо-франко-канадская система.
Все СРНС первого поколения - низкоорбитальные спутниковые системы, в которых координаты потребителя вычисляются
по
5
доплеровскому сдвигу частоты сигнала одного из спутников (дифференциальный и интегральный методы).
6.
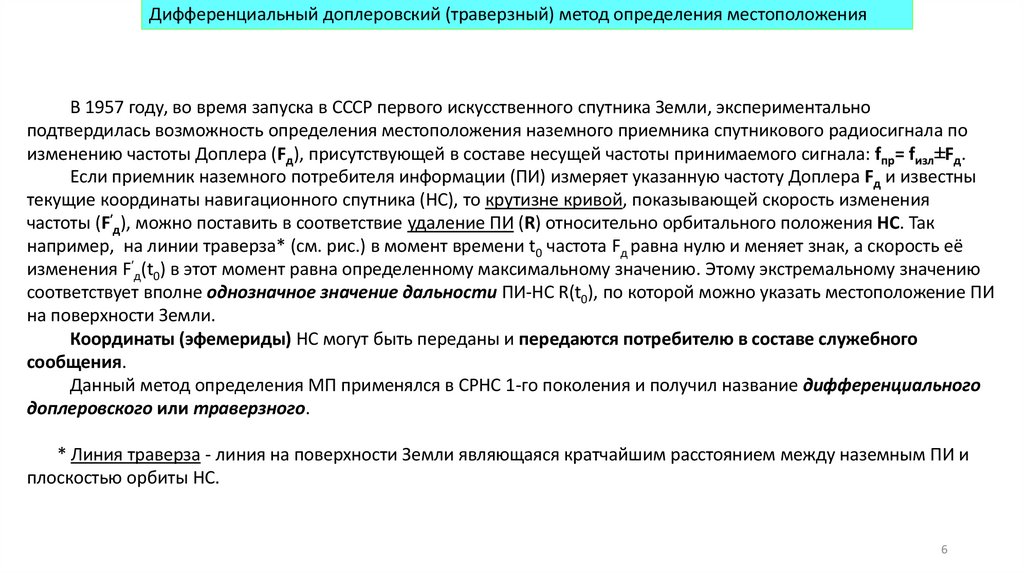
Дифференциальный доплеровский (траверзный) метод определения местоположенияВ 1957 году, во время запуска в СССР первого искусственного спутника Земли, экспериментально
подтвердилась возможность определения местоположения наземного приемника спутникового радиосигнала по
изменению частоты Доплера (Fд), присутствующей в составе несущей частоты принимаемого сигнала: fпр= fизл±Fд.
Если приемник наземного потребителя информации (ПИ) измеряет указанную частоту Доплера Fд и известны
текущие координаты навигационного спутника (НС), то крутизне кривой, показывающей скорость изменения
частоты (Fʹд), можно поставить в соответствие удаление ПИ (R) относительно орбитального положения НС. Так
например, на линии траверза* (см. рис.) в момент времени t0 частота Fд равна нулю и меняет знак, а скорость её
изменения Fʹд(t0) в этот момент равна определенному максимальному значению. Этому экстремальному значению
соответствует вполне однозначное значение дальности ПИ-НС R(t0), по которой можно указать местоположение ПИ
на поверхности Земли.
Координаты (эфемериды) НС могут быть переданы и передаются потребителю в составе служебного
сообщения.
Данный метод определения МП применялся в СРНС 1-го поколения и получил название дифференциального
доплеровского или траверзного.
* Линия траверза - линия на поверхности Земли являющаяся кратчайшим расстоянием между наземным ПИ и
плоскостью орбиты НС.
6
7.
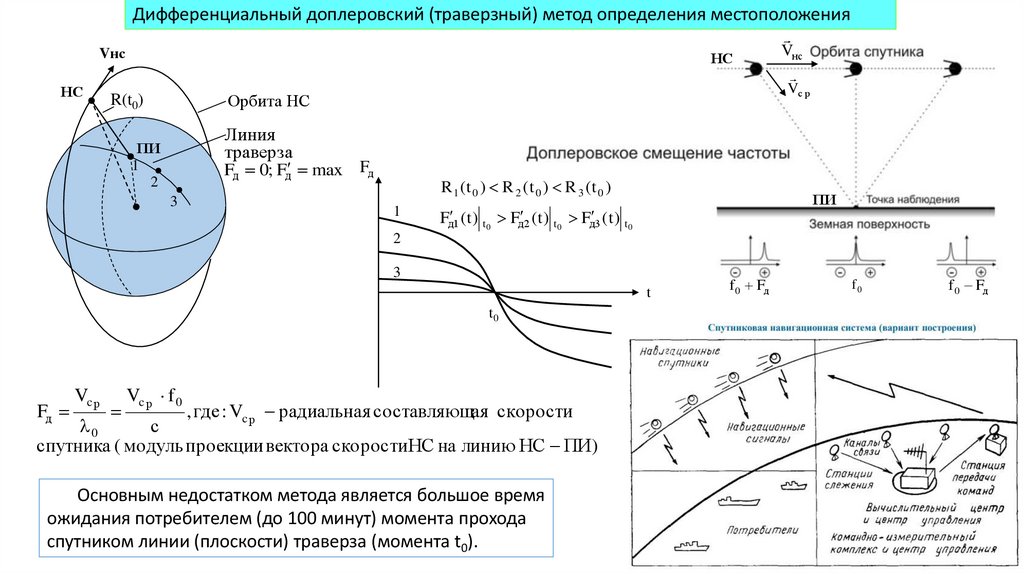
Дифференциальный доплеровский (траверзный) метод определения местоположенияVнс
НС
НС
Vс р
Орбита НС
R(t0)
Линия
траверза
Fд 0; Fд max Fд
ПИ
1
2
3
Vнс
R1 (t 0 ) R 2 (t 0 ) R 3 (t 0 )
1
ПИ
( t ) t 0 Fд2
( t ) t 0 Fд3
(t) t0
Fд1
2
3
t
f 0 Fд
f 0 Fд
f0
t0
Fд
Vc р
Vc р f 0
, где : Vc р радиальная составляющая скорости
0
с
спутника ( модуль проекции вектора скоростиНС на линию НС ПИ )
Основным недостатком метода является большое время
ожидания потребителем (до 100 минут) момента прохода
спутником линии (плоскости) траверза (момента t0).
7
8.
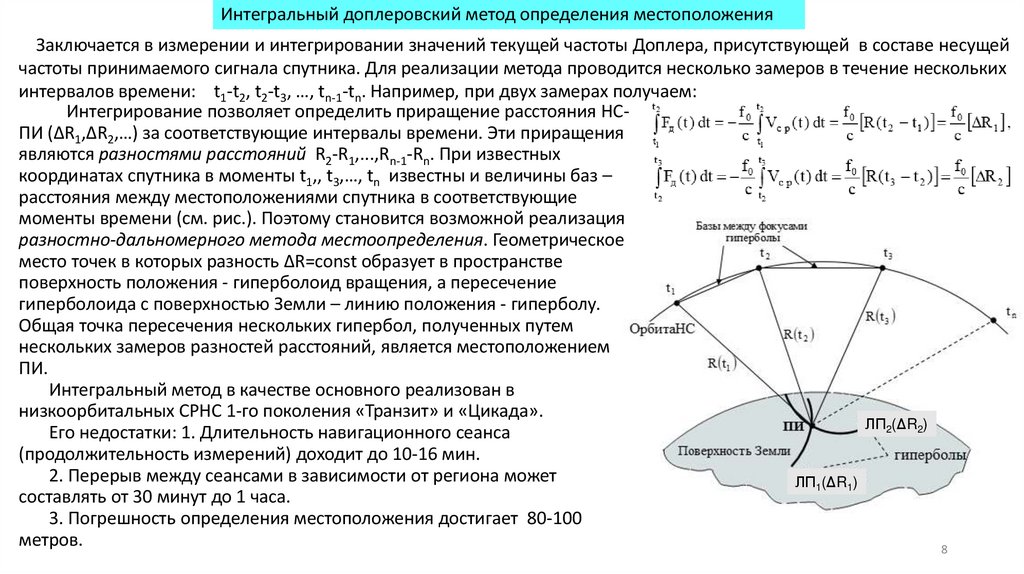
Интегральный доплеровский метод определения местоположенияЗаключается в измерении и интегрировании значений текущей частоты Доплера, присутствующей в составе несущей
частоты принимаемого сигнала спутника. Для реализации метода проводится несколько замеров в течение нескольких
интервалов времени: t1-t2, t2-t3, …, tn-1-tn. Например, при двух замерах получаем:
Интегрирование позволяет определить приращение расстояния НСПИ (ΔR1,ΔR2,…) за соответствующие интервалы времени. Эти приращения
являются разностями расстояний R2-R1,...,Rn-1-Rn. При известных
координатах спутника в моменты t1,, t3,…, tn известны и величины баз –
расстояния между местоположениями спутника в соответствующие
моменты времени (см. рис.). Поэтому становится возможной реализация
разностно-дальномерного метода местоопределения. Геометрическое
место точек в которых разность ΔR=const образует в пространстве
поверхность положения - гиперболоид вращения, а пересечение
гиперболоида с поверхностью Земли – линию положения - гиперболу.
Общая точка пересечения нескольких гипербол, полученных путем
нескольких замеров разностей расстояний, является местоположением
ПИ.
Интегральный метод в качестве основного реализован в
низкоорбитальных СРНС 1-го поколения «Транзит» и «Цикада».
ЛП2(ΔR2)
Его недостатки: 1. Длительность навигационного сеанса
(продолжительность измерений) доходит до 10-16 мин.
2. Перерыв между сеансами в зависимости от региона может
ЛП1(ΔR1)
составлять от 30 минут до 1 часа.
3. Погрешность определения местоположения достигает 80-100
метров.
8
9.
Необходимость перехода к СРНС 2-го поколенияГлавные недостатки: СРНС первого поколения:
• они являются системами дискретного действия с длительностью процесса измерения до 15 мин. (низкое
быстродействие) и перерывами в навигационных сеансах до полутора часов;
• большие ошибки местоопределения, для неподвижного объекта десятки метров, а для движущегося сотни метров;
• определение только двухмерных координат.
Основными требованиями к современной спутниковой радионавигационной системе являются:
• глобальность и непрерывность навигационно-временного обеспечения потребителей;
• неограниченность числа потребителей системы;
• возможность измерения координат потребителя в трехмерном пространстве, а также определения вектора его
скорости и угловой ориентации;
• высокая точность навигационно-временных определений.
1.
2.
3.
4.
В основу современной спутниковой навигации положено как минимум четыре идеи
Определение вектора состояния потребителя по измеренным расстояниям (псевдодальностям) до НС.
Обеспечение точной привязки НС и потребителя по времени.
Определение вектора состояния НС.
Компенсация погрешностей измерений с использованием специальных математических моделей. 9
10.
2. Классификация и структура СРНС10
11.
Классификация СРНС1. По месту решения навигационной задачи:
- СРНС самоопределения (навигационные параметры (НП) определяются потребителем информации);
- СРНС иноопределения (НП определяются не в аппаратуре ПИ, а в ином месте).
2. По степени активности (излучения) ПИ:
- пассивные СРНС (ПИ в своём составе имеет только приемник);
- активные СРНС (ПИ в своём составе имеет и приемник и передатчик).
3. По темпу выдачи определяемых параметров движения (координат):
СРНС дискретного действия и СРНС непрерывного действия.
4. По высоте орбит НС:
- низкоорбитные СРНС с высотой орбиты ~ 1000 км. и периодом обращения То~105мин.;
- средневысокие СРНС с высотой орбиты около 14000-20000 км. и То~8-12часов;
- высокоорбитные СРНС – геостационарные (геосинхронные) с высотой орбиты около 36100 км.
5. По измеряемым параметрам СРНС:
- с координатными измерениями (дальномерные, угломерные, разностно-дальномерные);
- со скоростными измерениями (радиально-скоростные, разностно-радиально-скоростные, угломерно-скоростные
системы).
6. По характеру эфемеридного обеспечения*:
- СРНС с эфемеридным обеспечением по прогнозу;
- СРНС с уточнением эфемерид в навигационном сеансе.
- *Эфемеридное обеспечение - определение и прогноз параметров движения всех НС с помощью наземных средств
и передача этой информации («закладка») на НС с целью её последующей передачи в навигационном сообщении
потребителям.
7. По размерам рабочей области СРНС бывают глобальными и региональными.
12.
Состав и состояние орбитальных группировок СРНС на 03.11.25Состав и состояние ОГ
ГЛОНАСС на 03.11.2025
Всего в составе ОГ
28
Используется по ЦН
24
На этапе ввода в систему 0
Временно выведен
0
На исследовании
2
Главного конструктора
Орбитальный резерв
2
На этапе летных
0
испытаний
Состав и состояние ОГ GPS
на 03.11.2025
Всего в составе ОГ
33
Используется по ЦН
32
На этапе ввода в систему 0
Временно выведен
1
Состав и состояние ОГ
Galileo на 03.11.2025
Всего в составе ОГ
31
Используется по ЦН
27
Не используется по
4
Состав и состояние ОГ
Beidou на 03.11.2025
Всего в составе ОГ
На геостационарной орбитах
На наклонных геосинхронных
орбитах
На средних круговых орбитах
Используются по целевому
назначению
Не используются по целевому
назначению
54
9
12
33
44
10
Действующие региональные спутниковые системы
Индийская региональная система спутниковой навигации (IRNSS), проект которой реализован правительством Индии, разработан
Индийской организацией космических исследований (ISRO) для предоставления геолокационных данных пользователям Индии и
близлежащих регионов. IRNSS в перспективе должна состоять из семи спутников (4 на геосинр. и 3 геостац. орб.).
QZSS — японская квазизенитная спутниковая система (Quasi-Zenith Satellite System) была задумана в 2002 г. как коммерческая
система с набором услуг для подвижной связи, вещания и широкого использования для навигации в Японии и соседних районах ЮгоВосточной Азии. Первый QZSS-спутник был запущен в 2010 г. Предполагается создание группировки из трёх спутников, находящихся
на геосинхронных орбитах, а также собственной системы дифференциальной коррекции.
12
13.
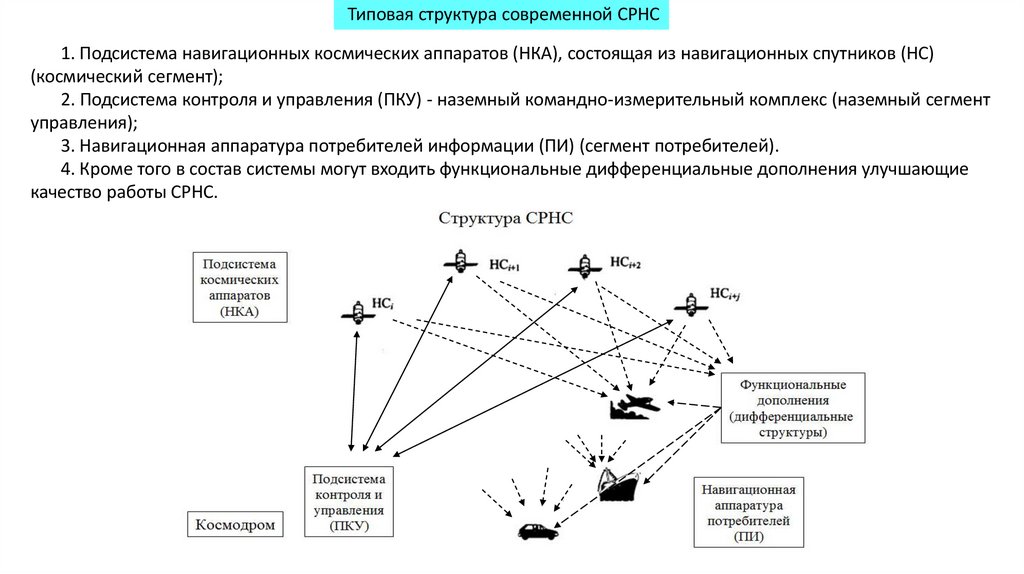
Типовая структура современной СРНС1. Подсистема навигационных космических аппаратов (НКА), состоящая из навигационных спутников (НС)
(космический сегмент);
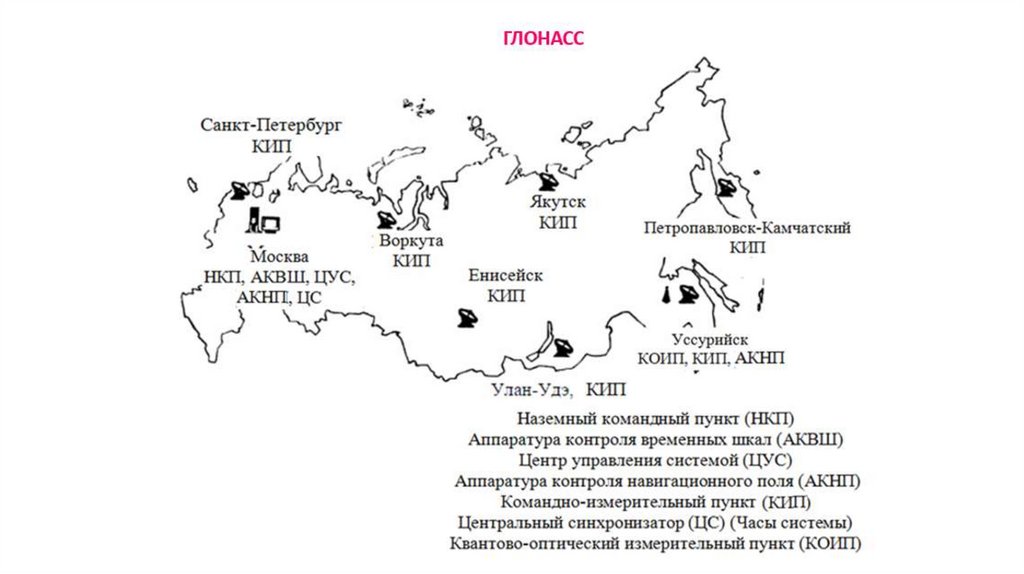
2. Подсистема контроля и управления (ПКУ) - наземный командно-измерительный комплекс (наземный сегмент
управления);
3. Навигационная аппаратура потребителей информации (ПИ) (сегмент потребителей).
4. Кроме того в состав системы могут входить функциональные дифференциальные дополнения улучшающие
качество работы СРНС.
14.
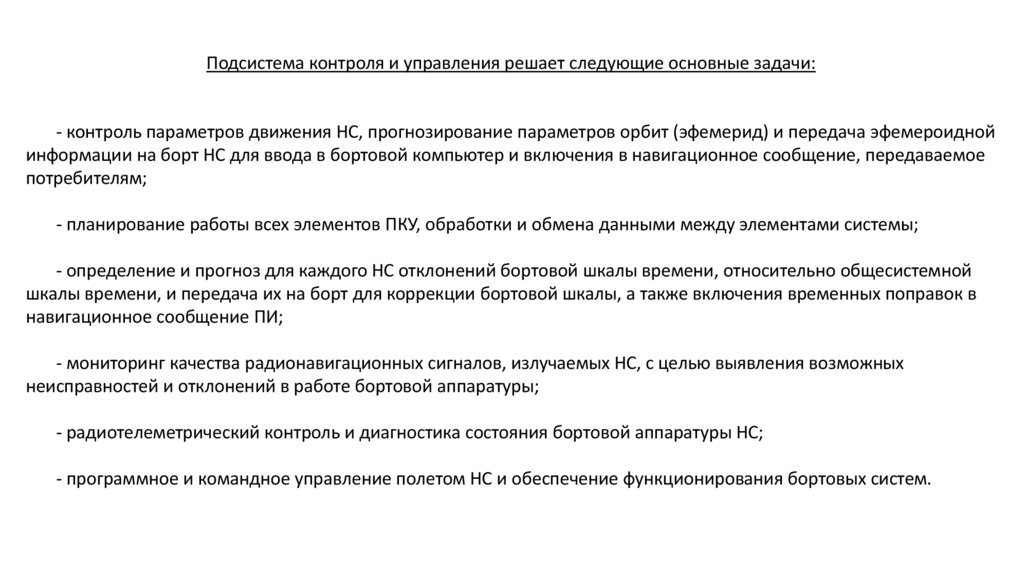
Подсистема контроля и управления решает следующие основные задачи:- контроль параметров движения НС, прогнозирование параметров орбит (эфемерид) и передача эфемероидной
информации на борт НС для ввода в бортовой компьютер и включения в навигационное сообщение, передаваемое
потребителям;
- планирование работы всех элементов ПКУ, обработки и обмена данными между элементами системы;
- определение и прогноз для каждого НС отклонений бортовой шкалы времени, относительно общесистемной
шкалы времени, и передача их на борт для коррекции бортовой шкалы, а также включения временных поправок в
навигационное сообщение ПИ;
- мониторинг качества радионавигационных сигналов, излучаемых НС, с целью выявления возможных
неисправностей и отклонений в работе бортовой аппаратуры;
- радиотелеметрический контроль и диагностика состояния бортовой аппаратуры НС;
- программное и командное управление полетом НС и обеспечение функционирования бортовых систем.
15.
16.
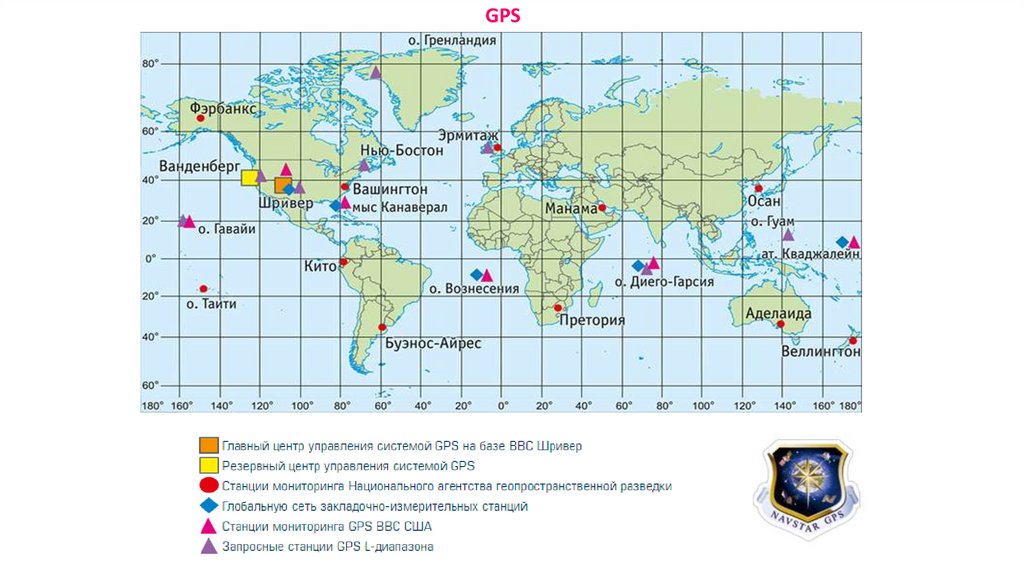
GPS17.
1718.
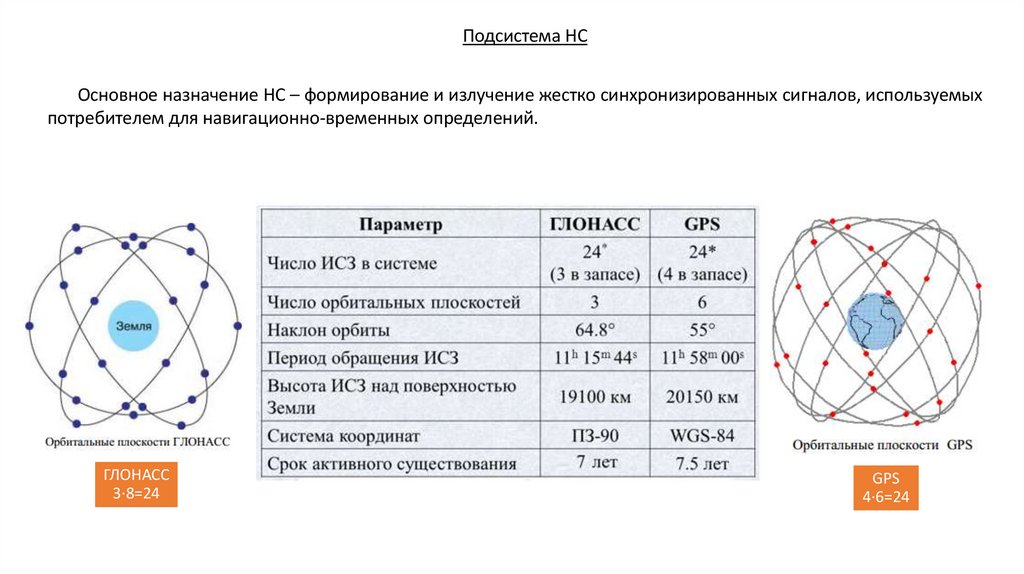
Подсистема НСОсновное назначение НС – формирование и излучение жестко синхронизированных сигналов, используемых
потребителем для навигационно-временных определений.
ГЛОНАСС
3·8=24
GPS
4·6=24
19.
Навигационные спутники предназначены для решения следующих задач:•• навигационного обеспечения:
– непрерывного излучения высокостабильных навигационных радиосигналов в дециметровом диапазоне волн;
– приема, хранения, формирования и передачи навигационной информации;
– формирования оцифрованной высокостабильной бортовой шкалы времени.
•• автономного эфемеридно-временного обеспечения:
– проведения межспутниковых измерений, расчета и прогнозирования эфемерид и частотно-временных поправок;
– информационного обмена между НС результатами межспутниковых измерений и навигационными параметрами;
– приема данных о параметрах вращения Земли.
•• управления, контроля и баллистического обеспечения:
– ретрансляции или излучения сигналов для радиоконтроля орбиты спутника и определения поправок к бортовой
шкале времени;
– приема и отработки радиокоманд с ПКУ;
– формирования телеметрических данных о состоянии бортовой аппаратуры и передачи их в наземный комплекс
управления;
– приема и отработки кодов коррекции и фазирования бортовой шкалы времени;
– анализа состояния бортовой аппаратуры и выработки управляющих команд;
– выработки и передачи сигналов технической неисправности;
– ретрансляции запросных лазерных сигналов наземных квантово-оптических средств.
Навигационная аппаратура потребителей предназначена для приема и обработки радиосигналов НС с целью
определения необходимой потребителям информации (пространственно-временных координат, направления и
скорости, пространственной ориентации и т.п.).
В состав НАП входят антенна с равномерной диаграммой направленности; высокочастотный приемник,
осуществляющий фильтрацию и разделение сигналов, и вычислитель, решающий задачу навигационных определений.
20.
Системы координат и времени в СРНСВ зависимости от типа СРНС от структурного сегмента СРНС в них могут использоваться различные системы
координат (см. Т1-1):
геоцентрическая инерциальная (для вычисления орбит спутников и прогнозирования их движения);
геоцентрическая система координат (ГСК), связанная с Землей (для построения моделей орбит спутников и
наземных измерений орбит;
геодезическая геоцентрическая общеземная система координат (для навигационного обеспечения потребителей.
Для геодезического обеспечения потребителей, навигации и решения глобальных задач в настоящее время
используют общеземные геоцентрические системы координат в GPS: WGS – 84 ( США ) и в ГЛОНАСС: ПЗ – 90.11 ( РФ ).
В СРНС используются собственные высокоточные шкалы времени (ШВ), которые привязываются к всемирному
координированному времени UTC (Coordinated Universal Time).
В качестве вспомогательной ШВ при использовании сигналов в ГНСС GPS может применяться ШВ США — 67 UTC
(USNO). Номинально ШВ GPS имеет постоянное, равное 19 с, расхождение с международным атомным временем.
Отсчёт времени ведётся в неделях GPS и секундах в рамках текущей недели, начало отсчёта – 00 ч 00 мин 06.01.1980.
В СРНС ГЛОНАСС синхронизация производится по координированному времени UTC (SU), задаваемой
существующей эталонной базой РФ. Потребитель имеет возможность перехода к следующим ШВ: шкала московского
декретного времени (шкала МДВ); шкала универсального координированного времени государственного первичного
эталона Российской Федерации UTC(SU); шкала всемирного времени (UT1); шкала международного атомного
времени (TAI); ШВ системы GPS.
В бортовую шкалу времени каждого из спутников вводится пересчётный коэффициент, зависящий от высоты
орбиты и учитывающий два релятивистских эффекта: движение спутника относительно наземных часов
(эффект релятивистского замедления времени) и разность гравитационных потенциалов на орбите и на поверхности
Земли (эффект гравитационного красного смещения).
20
21.
3. Общие особенности построения современных СРНС.21
22.
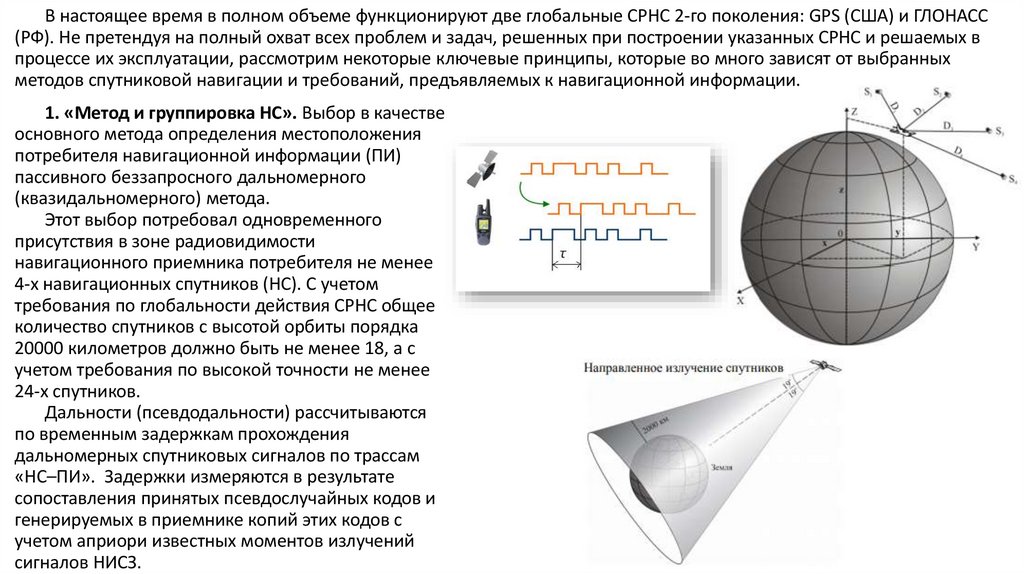
В настоящее время в полном объеме функционируют две глобальные СРНС 2-го поколения: GPS (США) и ГЛОНАСС(РФ). Не претендуя на полный охват всех проблем и задач, решенных при построении указанных СРНС и решаемых в
процессе их эксплуатации, рассмотрим некоторые ключевые принципы, которые во много зависят от выбранных
методов спутниковой навигации и требований, предъявляемых к навигационной информации.
1. «Метод и группировка НС». Выбор в качестве
основного метода определения местоположения
потребителя навигационной информации (ПИ)
пассивного беззапросного дальномерного
(квазидальномерного) метода.
Этот выбор потребовал одновременного
присутствия в зоне радиовидимости
навигационного приемника потребителя не менее
4-х навигационных спутников (НС). С учетом
требования по глобальности действия СРНС общее
количество спутников с высотой орбиты порядка
20000 километров должно быть не менее 18, а с
учетом требования по высокой точности не менее
24-х спутников.
Дальности (псевдодальности) рассчитываются
по временным задержкам прохождения
дальномерных спутниковых сигналов по трассам
«НС–ПИ». Задержки измеряются в результате
сопоставления принятых псевдослучайных кодов и
генерируемых в приемнике копий этих кодов с
учетом априори известных моментов излучений
сигналов НИСЗ.
23.
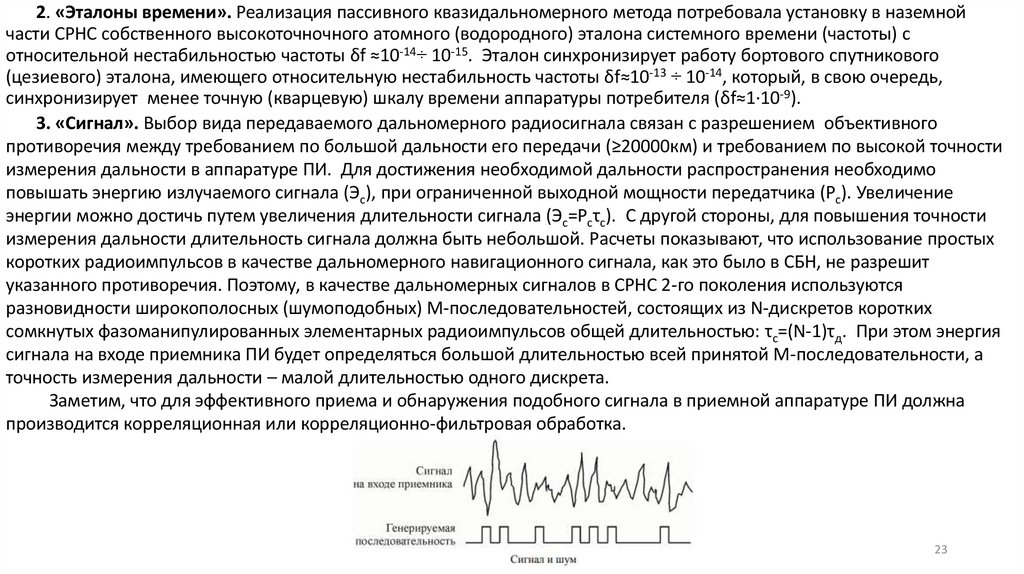
2. «Эталоны времени». Реализация пассивного квазидальномерного метода потребовала установку в наземнойчасти СРНС собственного высокоточночного атомного (водородного) эталона системного времени (частоты) с
относительной нестабильностью частоты δf ≈10-14÷ 10-15. Эталон синхронизирует работу бортового спутникового
(цезиевого) эталона, имеющего относительную нестабильность частоты δf≈10-13 ÷ 10-14, который, в свою очередь,
синхронизирует менее точную (кварцевую) шкалу времени аппаратуры потребителя (δf≈1·10-9).
3. «Сигнал». Выбор вида передаваемого дальномерного радиосигнала связан с разрешением объективного
противоречия между требованием по большой дальности его передачи (≥20000км) и требованием по высокой точности
измерения дальности в аппаратуре ПИ. Для достижения необходимой дальности распространения необходимо
повышать энергию излучаемого сигнала (Эс), при ограниченной выходной мощности передатчика (Рс). Увеличение
энергии можно достичь путем увеличения длительности сигнала (Эс=Рсτс). С другой стороны, для повышения точности
измерения дальности длительность сигнала должна быть небольшой. Расчеты показывают, что использование простых
коротких радиоимпульсов в качестве дальномерного навигационного сигнала, как это было в СБН, не разрешит
указанного противоречия. Поэтому, в качестве дальномерных сигналов в СРНС 2-го поколения используются
разновидности широкополосных (шумоподобных) М-последовательностей, состоящих из N-дискретов коротких
сомкнутых фазоманипулированных элементарных радиоимпульсов общей длительностью: τс=(N-1)τд. При этом энергия
сигнала на входе приемника ПИ будет определяться большой длительностью всей принятой М-последовательности, а
точность измерения дальности – малой длительностью одного дискрета.
Заметим, что для эффективного приема и обнаружения подобного сигнала в приемной аппаратуре ПИ должна
производится корреляционная или корреляционно-фильтровая обработка.
23
24.
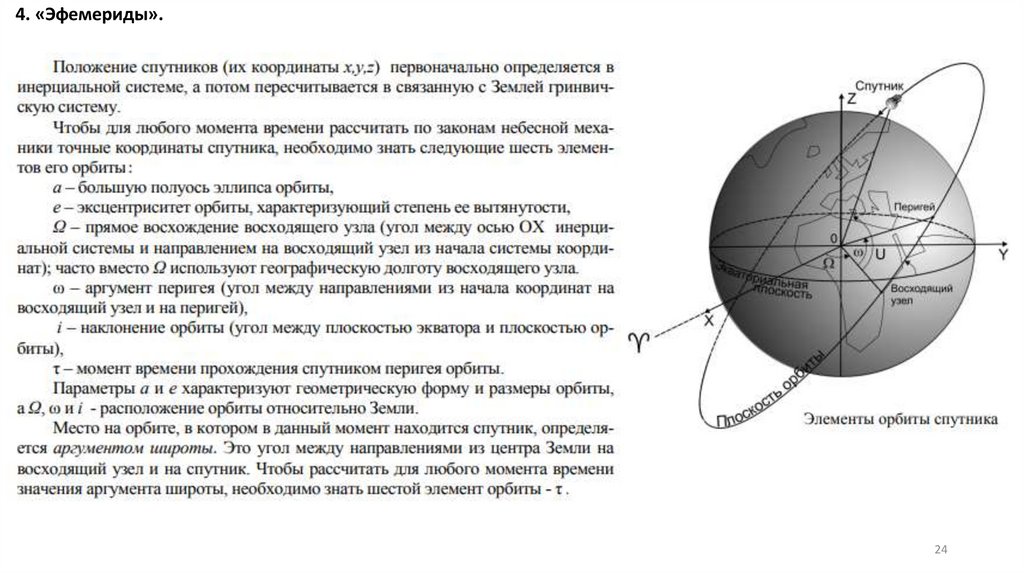
4. «Эфемериды».24
25.
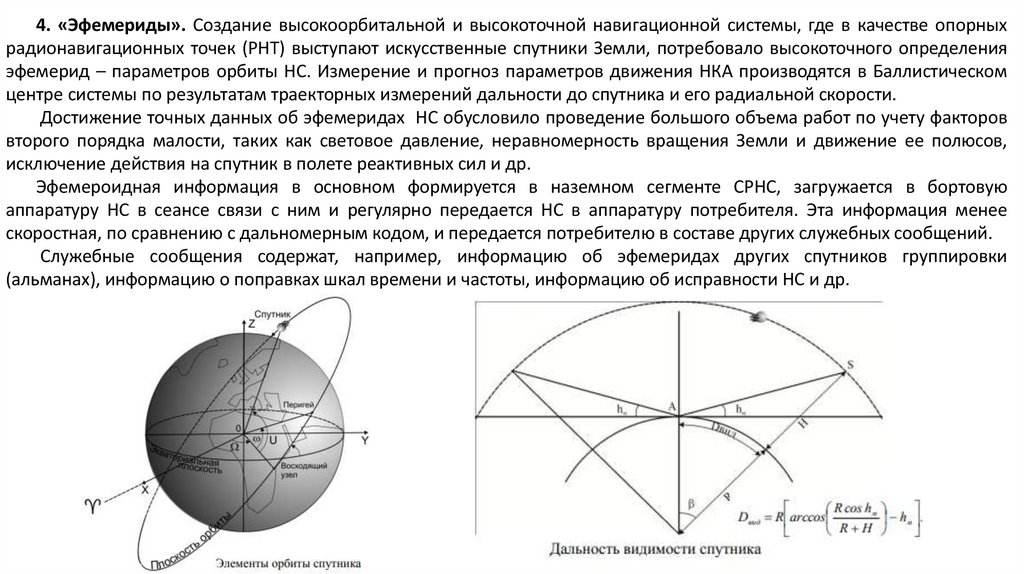
4. «Эфемериды». Создание высокоорбитальной и высокоточной навигационной системы, где в качестве опорныхрадионавигационных точек (РНТ) выступают искусственные спутники Земли, потребовало высокоточного определения
эфемерид – параметров орбиты НС. Измерение и прогноз параметров движения НКА производятся в Баллистическом
центре системы по результатам траекторных измерений дальности до спутника и его радиальной скорости.
Достижение точных данных об эфемеридах НС обусловило проведение большого объема работ по учету факторов
второго порядка малости, таких как световое давление, неравномерность вращения Земли и движение ее полюсов,
исключение действия на спутник в полете реактивных сил и др.
Эфемероидная информация в основном формируется в наземном сегменте СРНС, загружается в бортовую
аппаратуру НС в сеансе связи с ним и регулярно передается НС в аппаратуру потребителя. Эта информация менее
скоростная, по сравнению с дальномерным кодом, и передается потребителю в составе других служебных сообщений.
Служебные сообщения содержат, например, информацию об эфемеридах других спутников группировки
(альманах), информацию о поправках шкал времени и частоты, информацию об исправности НС и др.
26.
5. «Особенности распространения». Для передачи сигналов потребителю в СРНС используются несущие частоты вдиапазоне дециметровых волн, близкие к оптимальным с точки зрения минимального поглощения сигнала при
распространении и размеров антенн, используемых для передачи и приема.
Распространение дальномерного радиосигнала от НС до ПИ происходит в неоднородной, нестационарной,
неизотропной, диспергирующей среде, влияющей в первую очередь на фазовую скорость и траекторию
распространения волны. При этом возникают ошибки измерения времени запаздывания сигнала (ошибки измерения
дальности до НС) и ошибки измерения доплеровской составляющей несущей частоты (ошибки измерения скорости
движения ПИ). Наибольшее влияние на распространение оказывают ионосфера и тропосфера Земли. Для снижения
влияния факторов среды распространения в СРНС принимается ряд мер, в частности: проводится мониторинг и
моделирование трассы распространения, проводится излучение сигнала на двух несущих частотах, реализуется
статистическая обработка результатов избыточных измерений и др.
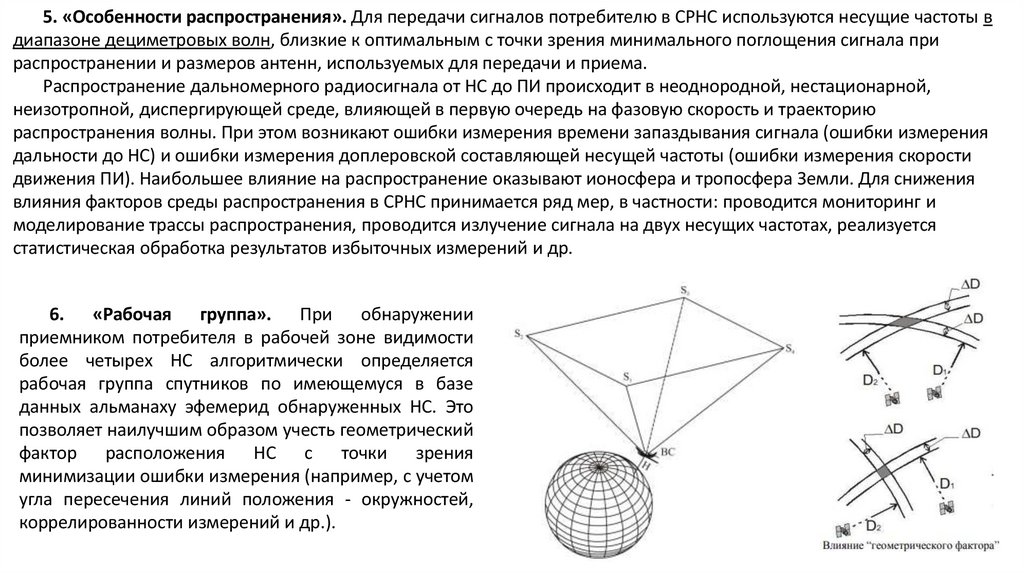
6. «Рабочая группа». При обнаружении
приемником потребителя в рабочей зоне видимости
более четырех НС алгоритмически определяется
рабочая группа спутников по имеющемуся в базе
данных альманаху эфемерид обнаруженных НС. Это
позволяет наилучшим образом учесть геометрический
фактор расположения НС с точки зрения
минимизации ошибки измерения (например, с учетом
угла пересечения линий положения - окружностей,
коррелированности измерений и др.).
27.
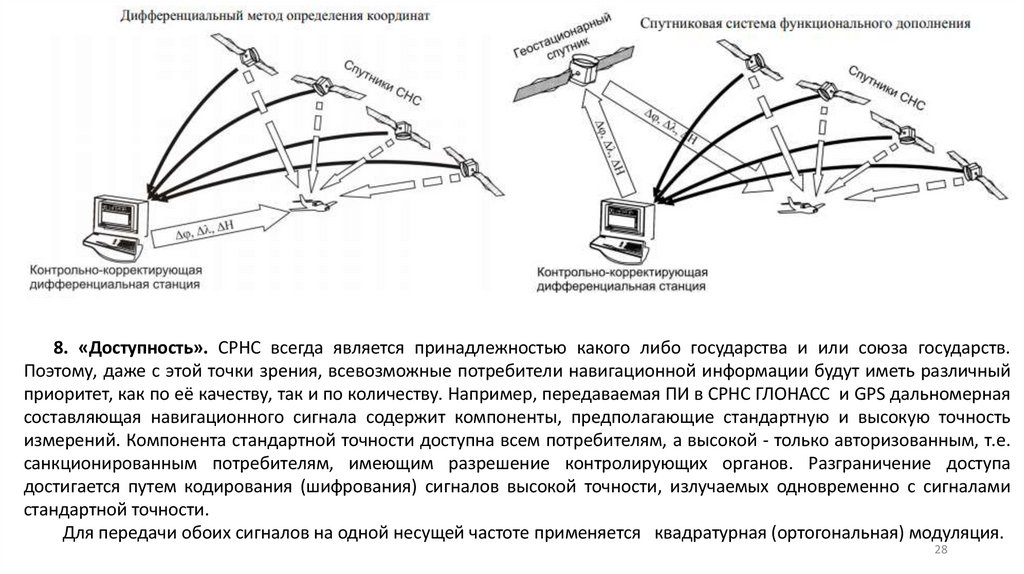
7. «Функциональные дополнения». Для повышения качества навигации в СРНС включаются системыфункциональных дополнений СНС (augmentation systems). Функциональным дополнением называется комплекс
технических и программных средств, предназначенный для обеспечения потребителя глобальной навигационной
спутниковой системы дополнительной информацией, позволяющей повысить точность и достоверность определения
его пространственных координат, составляющих скорости движения и поправки часов и гарантирующей целостность
этой системы.
Существует три вида систем функциональных дополнений:
- бортовые, не требующие для своей работы наземного или космического оборудования (совокупность специальных
алгоритмов обработки информации, поступающей в приемник);
- наземные, в которых используются расположенные на Земле дифференциальные корректирующие станции;
- спутниковые, в которых кроме наземных станций используются специальные спутники, передающие на борт ВС
необходимую информацию.
Основу наземной дифференциальной подсистемы составляет наземная контрольно-корректирующая станция (ККС),
координаты которой известны и определены с большой точностью. Путем сравнения измеренных значений
псевдодальностей до спутников с известными значениями, вычисленными на основе полученной от главной станции
информации об орбитах НС, вычисляются поправки к псевдодальностям. Полученные значения поправок передаются
потребителям по специально выделенным линиям передачи данных.
Потребитель должен иметь соответствующий приемник, оснащенный модулем для приема радиосигналов ККС.
В спутниковых системах функционального дополнения SBAS (Satellite- Based Augmentation System) поправки на борт
передаются через специальные, как правило, геостационарные спутники. Системы включают в себя наземные опорные
станции, принимающие сигналы от спутников, основные станции, которые обрабатывают информацию и рассчитывают
поправки, а также передающие станции, которые передают поправки и другую необходимую информацию на
геостационарные спутники. Бортовые приемники потребителя прямо со спутника принимают поправки для того
региона, где они находятся, учитывают их и тем самым повышают точность определения своего местоположения и
целостность.
28.
8. «Доступность». СРНС всегда является принадлежностью какого либо государства и или союза государств.Поэтому, даже с этой точки зрения, всевозможные потребители навигационной информации будут иметь различный
приоритет, как по её качеству, так и по количеству. Например, передаваемая ПИ в СРНС ГЛОНАСС и GPS дальномерная
составляющая навигационного сигнала содержит компоненты, предполагающие стандартную и высокую точность
измерений. Компонента стандартной точности доступна всем потребителям, а высокой - только авторизованным, т.е.
санкционированным потребителям, имеющим разрешение контролирующих органов. Разграничение доступа
достигается путем кодирования (шифрования) сигналов высокой точности, излучаемых одновременно с сигналами
стандартной точности.
Для передачи обоих сигналов на одной несущей частоте применяется квадратурная (ортогональная) модуляция.
28
29.
Контрольные вопросы:1. Необходимость создания СРНС.
2. Как определяются координаты опорных РНТ в СРНС.
3. Основное назначение подсистем, входящих в СРНС.
4. Чем достигается глобальность навигации в СРНС.
5. От каких факторов будет зависеть точность определения местоположения ПО в СРНС.
6. Почему предъявляются высокие требования к эталонам времени в СРНС.
29