










 electronics
electronicsSimilar presentations:






")



Цифровые фильтры на микроконтроллере
1.
Лабораторияцифровой радиоэлектроники
Цифровые фильтры
на микроконтроллере
Лабораторная работа
Выполнение:
9 учебный семестр, 16 час
2.
Лабораторияцифровой радиоэлектроники
Основной задачей работы является изучение современной
методологии
целочисленного
проектирования
цифровых
фильтров и их реализации на микропроцессорных контроллерах
1. Цифровые сигналы и структура цифровых фильтров
2. Целочисленные модели цифровых фильтров
3. Синтез цифровых фильтров методoм ЦНП
4. Структура микропроцессорного контроллера (МК)
5. Программирование МК в среде IAR
6. Панорамный измеритель частотных характеристик ЦФ
в среде LabVIEW
7. Измерение ЧХ цифровых фильтров на реальном
сигнале
2
3.
Лабораторияцифровой радиоэлектроники
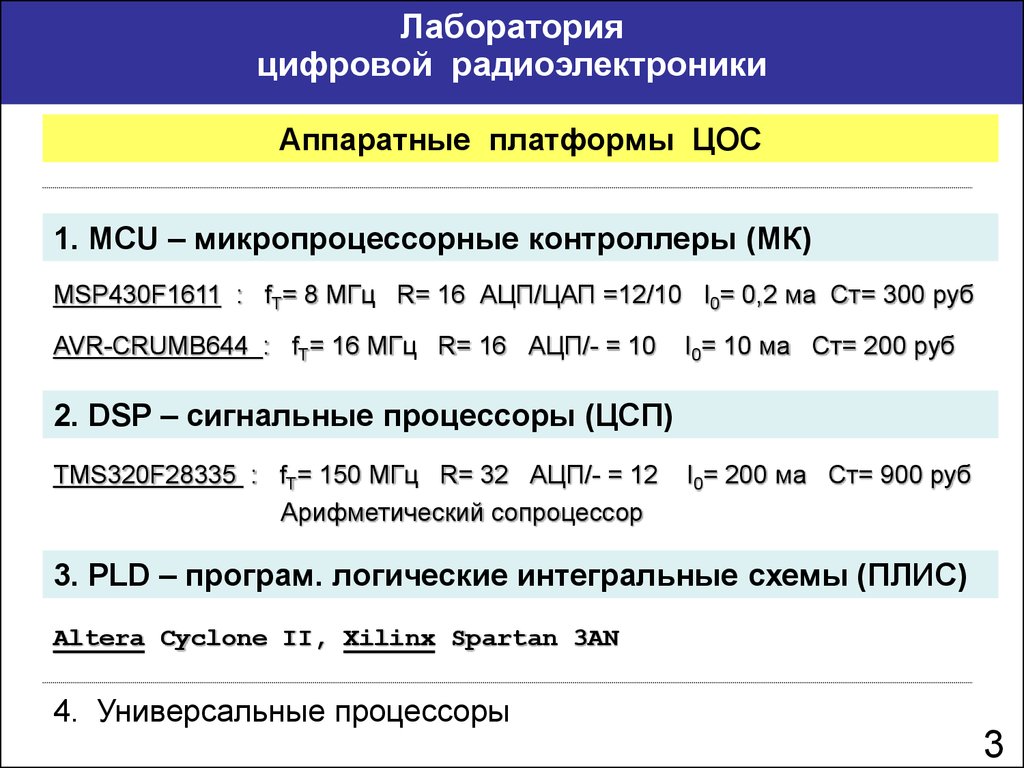
Аппаратные платформы ЦОС
1. MCU – микропроцессорные контроллеры (МК)
MSP430F1611 : fТ= 8 МГц R= 16 АЦП/ЦАП =12/10 I0= 0,2 ма Ст= 300 руб
AVR-CRUMB644 : fТ= 16 МГц R= 16 АЦП/- = 10
I0= 10 ма Ст= 200 руб
2. DSP – сигнальные процессоры (ЦСП)
TMS320F28335 : fТ= 150 МГц R= 32 АЦП/- = 12
Арифметический сопроцессор
I0= 200 ма Ст= 900 руб
3. PLD – програм. логические интегральные схемы (ПЛИС)
Altera Cyclone II, Xilinx Spartan 3AN
4. Универсальные процессоры
3
4.
Лабораторияцифровой радиоэлектроники
Целочисленное проектирование цифровых фильтров
Этапы проектирования
1. Задание на проектирование (ТЗ)
2. Целочисленные модели рекурсивных (IIR) и нерекурсивных
(FIR) цифровых фильтров
3. Синтез ЦФ методом ЦНП
4. Разработка программы расчёта
отклика ЦФ (С или Ассемблер)
5. Программирование микроконтроллера в среде IAR
6. Измерение частотных характристик синтезированного ЦФ на
реальном сигнале
Существующие методы синтеза
1. Метод ezIIR целочисленного округления
билинейного преобразования от
2. Метод целочисленного нелинейного
программирования (ЦНП) для синтеза
IIR и FIR цифровых фильтров
Стандартные частоты
дискретизации
1. Контроль, управление - 1 кГц,
2. Речь, связь - 8 кГц,
3. Звукотехника - 40 кГц,
4. Обработка ТВ изобр - 14 МГц.
4
5.
56.
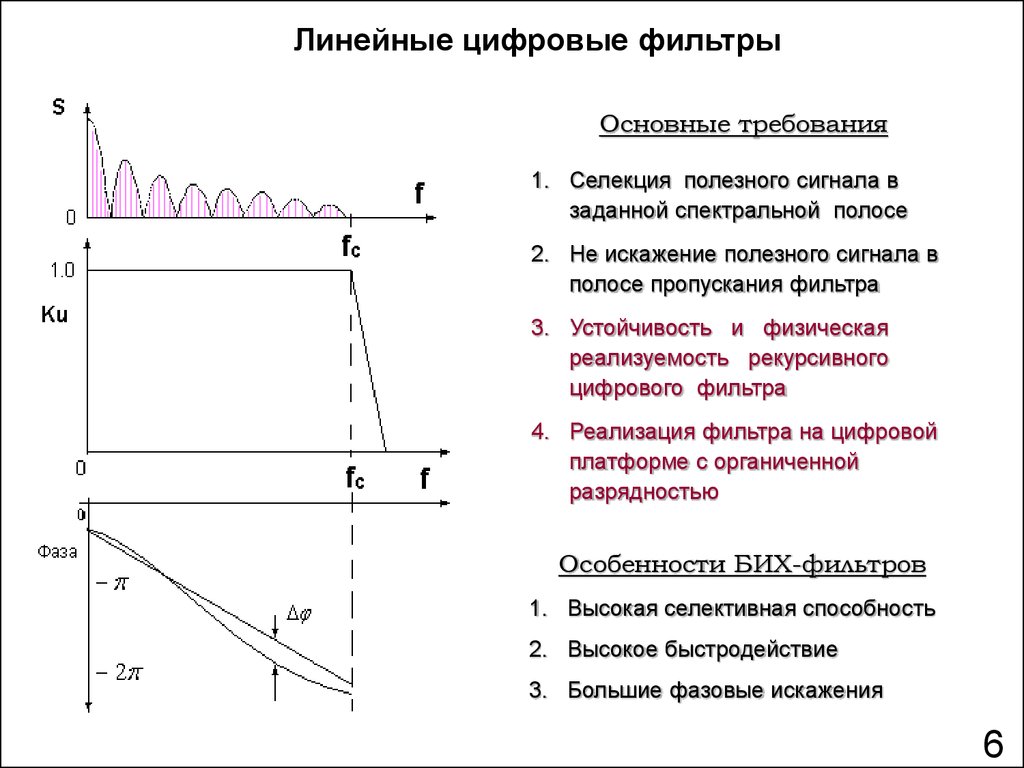
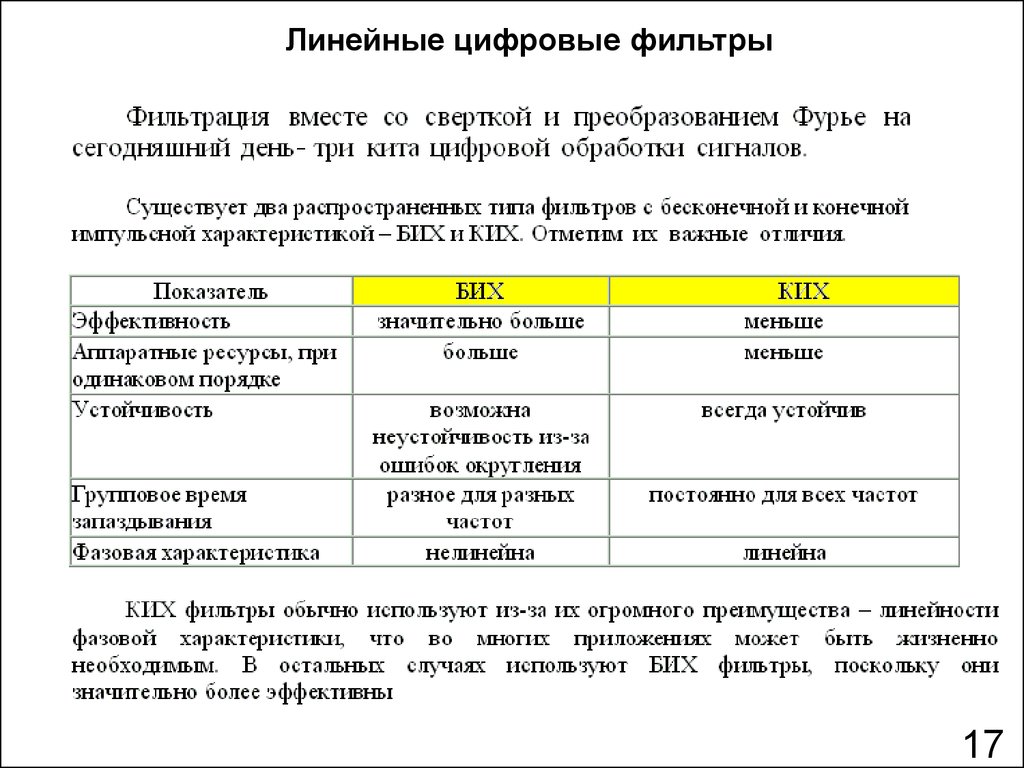
Линейные цифровые фильтрыОсновные требования
1. Селекция полезного сигнала в
заданной спектральной полосе
2. Не искажение полезного сигнала в
полосе пропускания фильтра
3. Устойчивость и физическая
реализуемость рекурсивного
цифрового фильтра
4. Реализация фильтра на цифровой
платформе с органиченной
разрядностью
Особенности БИХ-фильтров
1. Высокая селективная способность
2. Высокое быстродействие
3. Большие фазовые искажения
6
7.
Задержка сигнала в линейной системе7
8.
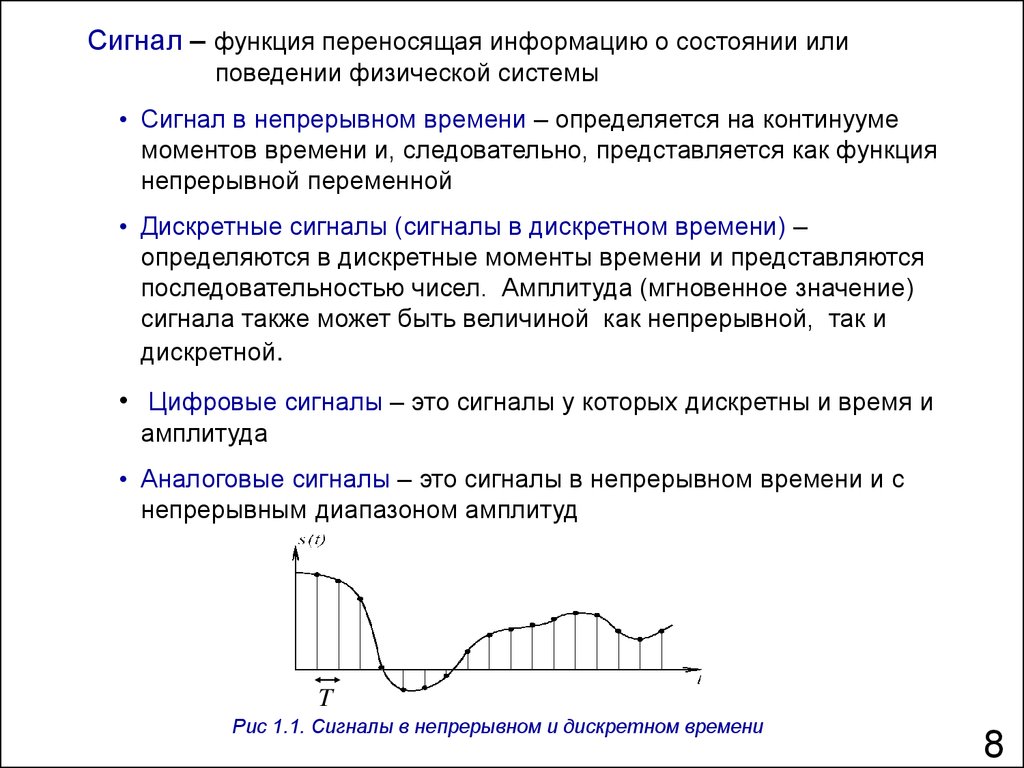
Сигнал – функция переносящая информацию о состоянии илиповедении физической системы
• Сигнал в непрерывном времени – определяется на континууме
моментов времени и, следовательно, представляется как функция
непрерывной переменной
• Дискретные сигналы (сигналы в дискретном времени) –
определяются в дискретные моменты времени и представляются
последовательностью чисел. Амплитуда (мгновенное значение)
сигнала также может быть величиной как непрерывной, так и
дискретной.
• Цифровые сигналы – это сигналы у которых дискретны и время и
амплитуда
• Аналоговые сигналы – это сигналы в непрерывном времени и с
непрерывным диапазоном амплитуд
T
Рис 1.1. Сигналы в непрерывном и дискретном времени
8
9.
Формирование цифрового сигналаДискретизация по времени
Квантование по уровню
A
6
5
4
3
2
1
0
B
C
D
0
1
2
3
4
5
6
7
8
9
10
2
2
3
5
4
1
0
1
2
1
3
x x(n) , n
0
b – полученная последовательность цифр
c – полученная последовательность двоичных кодовых групп
d – ошибки квантования
Кодирование по уровню
Cod
U
2M
U max
- разрядность
АЦП
9
10.
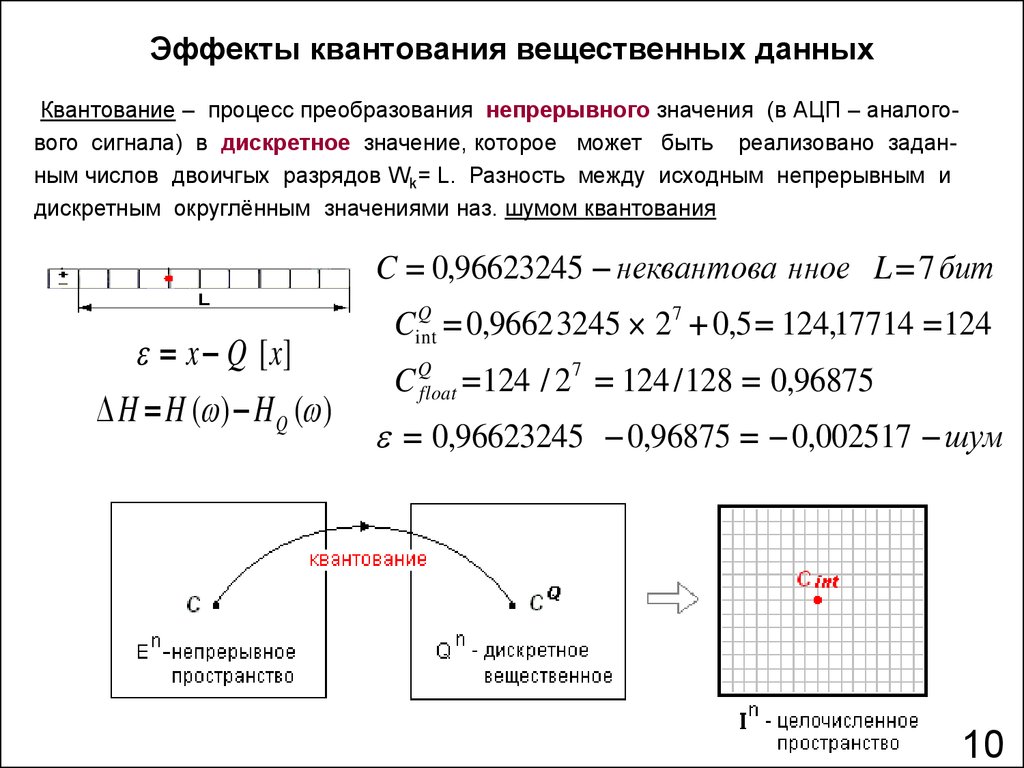
Эффекты квантования вещественных данныхКвантование – процесс преобразования непрерывного значения (в АЦП – аналогового сигнала) в дискретное значение, которое может быть реализовано заданным числов двоичгых разрядов Wk= L. Разность между исходным непрерывным и
дискретным округлённым значениями наз. шумом квантования
C 0,96623245 неквантова нное L 7 бит
x Q [ x]
H H ( ) H Q ( )
Q
Cint
0,9662 3245 27 0,5 124,17714 124
C Qfloat 124 / 27 124 / 128 0,96875
0,96623245 0,96875 0,002517 шум
10
11.
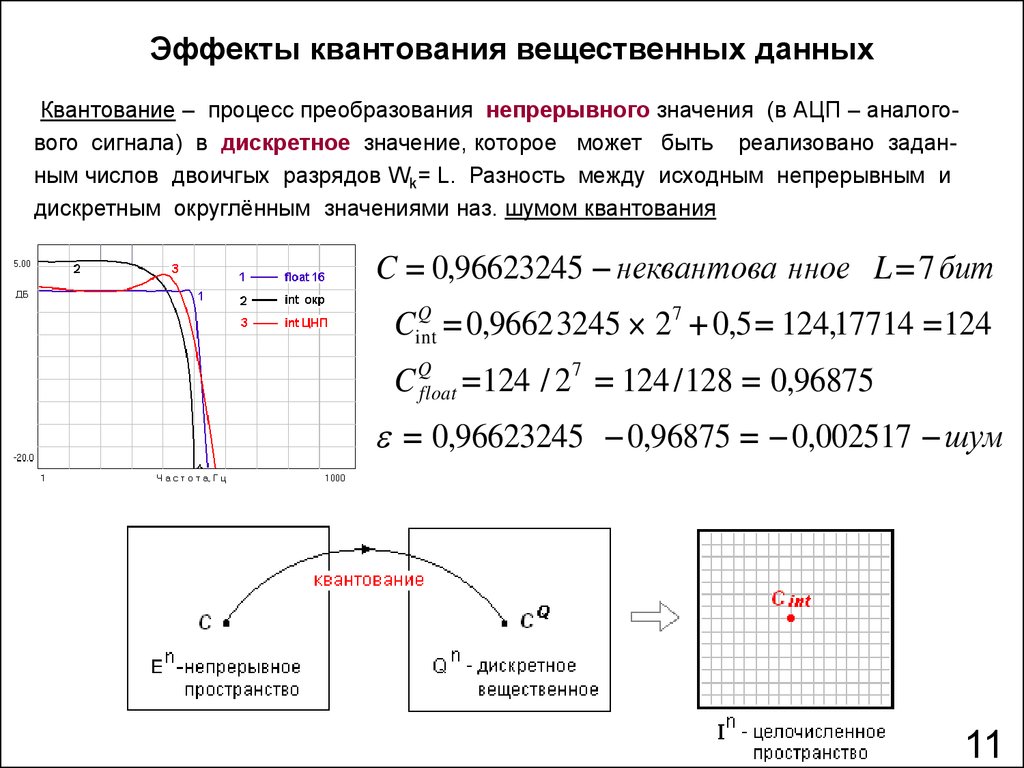
Эффекты квантования вещественных данныхКвантование – процесс преобразования непрерывного значения (в АЦП – аналогового сигнала) в дискретное значение, которое может быть реализовано заданным числов двоичгых разрядов Wk= L. Разность между исходным непрерывным и
дискретным округлённым значениями наз. шумом квантования
C 0,96623245 неквантова нное L 7 бит
Q
Cint
0,9662 3245 27 0,5 124,17714 124
C Qfloat 124 / 27 124 / 128 0,96875
0,96623245 0,96875 0,002517 шум
11
12.
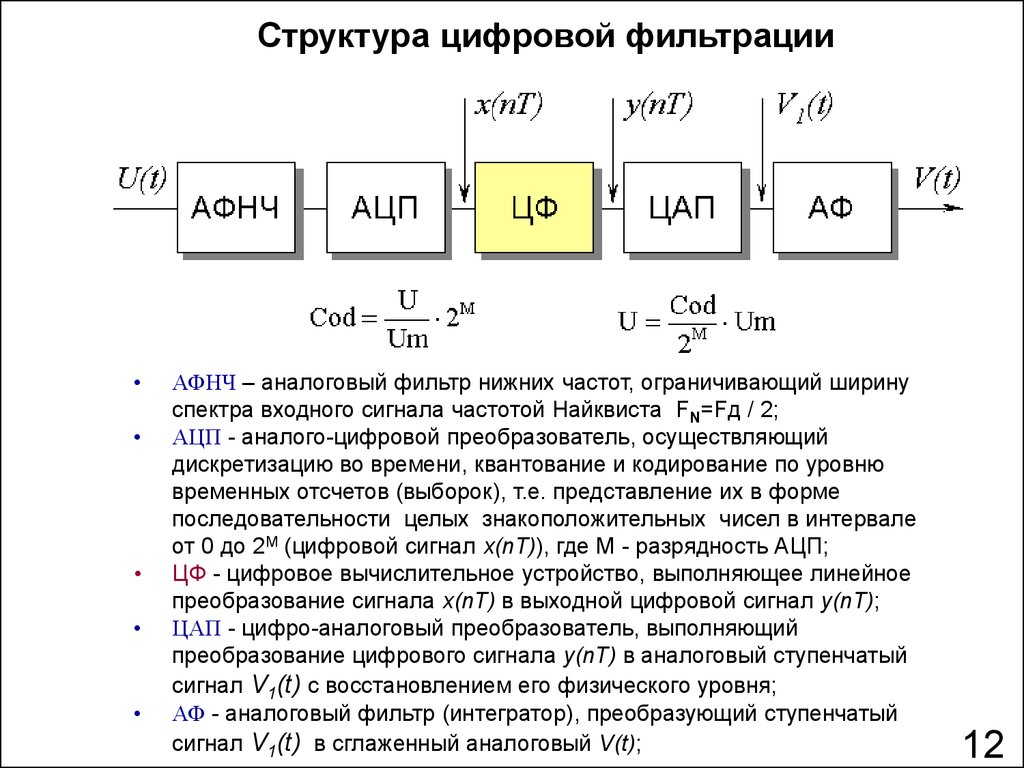
Структура цифровой фильтрацииАФНЧ – аналоговый фильтр нижних частот, ограничивающий ширину
спектра входного сигнала частотой Найквиста FN=Fд / 2;
АЦП - аналого-цифровой преобразователь, осуществляющий
дискретизацию во времени, квантование и кодирование по уровню
временных отсчетов (выборок), т.е. представление их в форме
последовательности целых знакоположительных чисел в интервале
от 0 до 2М (цифровой сигнал x(nT)), где М - разрядность АЦП;
ЦФ - цифровое вычислительное устройство, выполняющее линейное
преобразование сигнала x(nT) в выходной цифровой сигнал y(nT);
ЦАП - цифро-аналоговый преобразователь, выполняющий
преобразование цифрового сигнала y(nT) в аналоговый ступенчатый
сигнал V1(t) с восстановлением его физического уровня;
АФ - аналоговый фильтр (интегратор), преобразующий ступенчатый
сигнал V1(t) в сглаженный аналоговый V(t);
12
13.
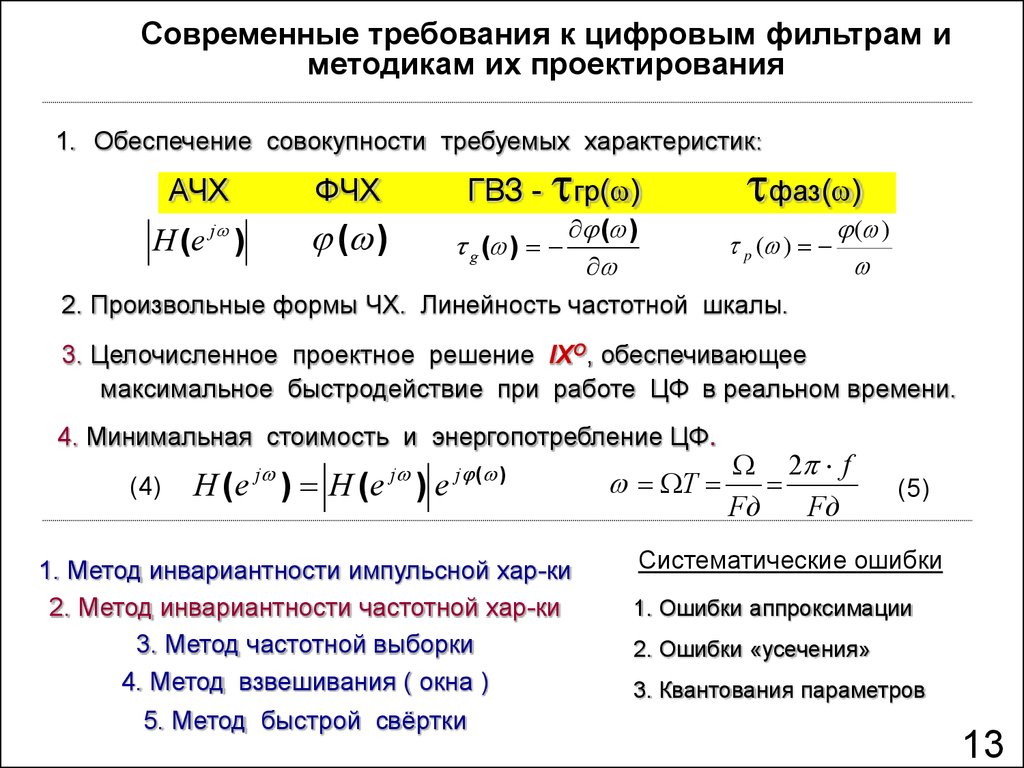
Современные требования к цифровым фильтрам иметодикам их проектирования
1. Обеспечение совокупности требуемых характеристик:
АЧХ
ФЧХ
ГВЗ -
гр( )
фаз( )
( )
( )
p ( )
2. Произвольные формы ЧХ. Линейность частотной шкалы.
( )
H ( e j )
g ( )
3. Целочисленное проектное решение IXO, обеспечивающее
максимальное быстродействие при работе ЦФ в реальном времени.
4. Минимальная стоимость и энергопотребление ЦФ.
(4)
j
j
H (e ) H (e ) e
j ( )
1. Метод инвариантности импульсной хар-ки
2. Метод инвариантности частотной хар-ки
3. Метод частотной выборки
4. Метод взвешивания ( окна )
5. Метод быстрой свёртки
T
2 f
Fд
Fд
(5)
Систематические ошибки
1. Ошибки аппроксимации
2. Ошибки «усечения»
3. Квантования параметров
13
14.
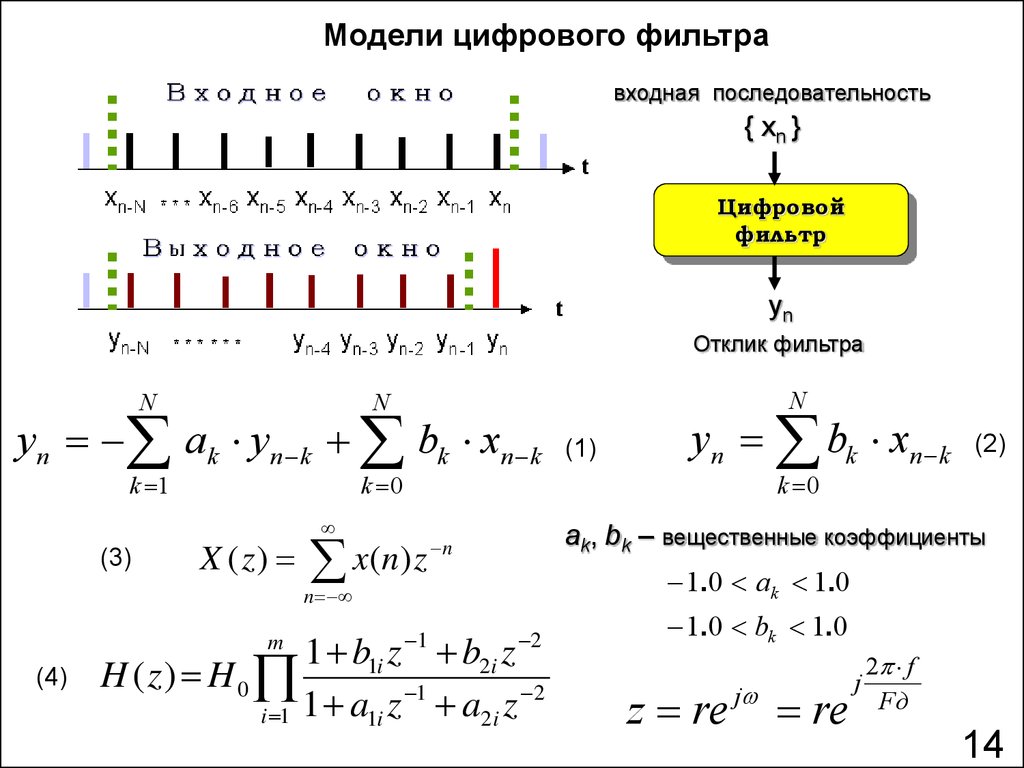
Модели цифрового фильтравходная последовательность
{ xn }
Цифровой
фильтр
yn
Отклик фильтра
N
yn ak yn k bk xn k
k 1
(3)
k 0
X ( z)
x ( n) z
1
yn bk xn k
(2)
k 0
1.0 ak 1.0
2
1 b1i z b2i z
H ( z) H 0
1
2
1
a
z
a
z
i 1
1i
2i
m
(1)
ak, bk – вещественные коэффициенты
n
n
(4)
N
N
1.0 bk 1.0
z re
j
re
j
2 f
Fд
14
15.
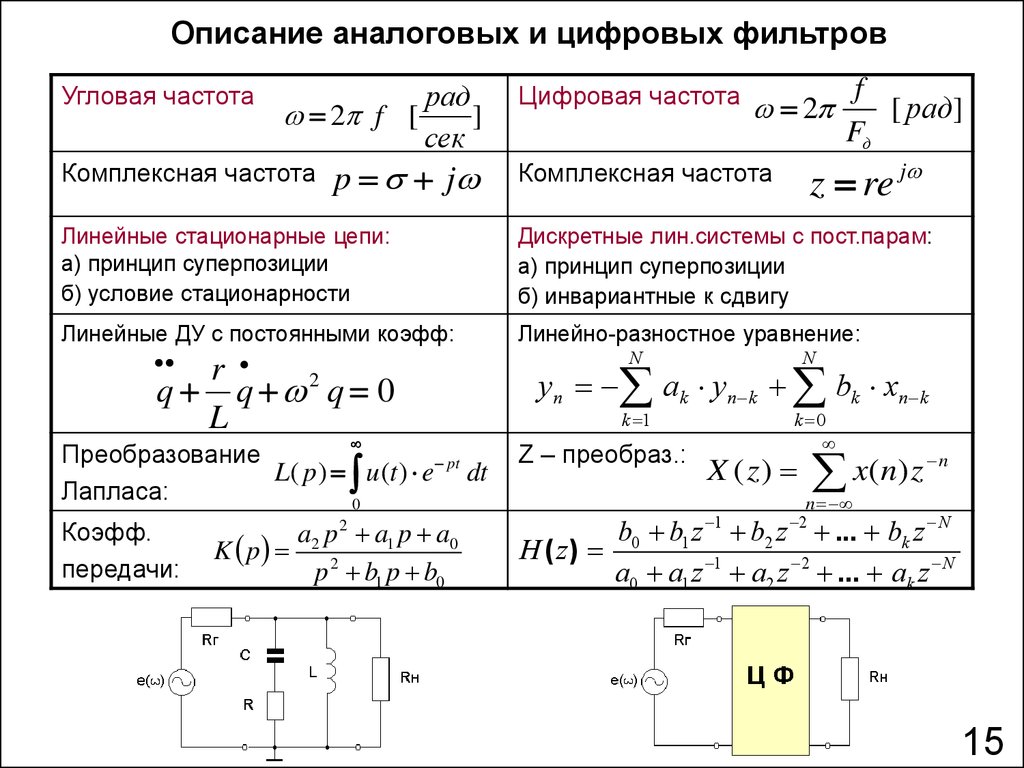
Описание аналоговых и цифровых фильтровУгловая частота
рад
2 f [
]
сек
Комплексная частота
p j
Цифровая частота
2
f
[ рад]
Fд
z re j
Комплексная частота
Линейные стационарные цепи:
а) принцип суперпозиции
б) условие стационарности
Дискретные лин.системы с пост.парам:
а) принцип суперпозиции
б) инвариантные к сдвигу
Линейные ДУ с постоянными коэфф:
Линейно-разностное уравнение:
r
q q 2 q 0
L
Преобразование
L( p) u (t ) e pt dt
Лапласа:
0
Коэфф.
передачи:
a2 p 2 a1 p a0
K p
p 2 b1 p b0
N
N
yn ak yn k bk xn k
k 1
Z – преобраз.:
k 0
X ( z)
1
n
x
(
n
)
z
n
2
b0 b1 z b2 z ... bk z N
H ( z)
a0 a1 z 1 a2 z 2 ... ak z N
15
16.
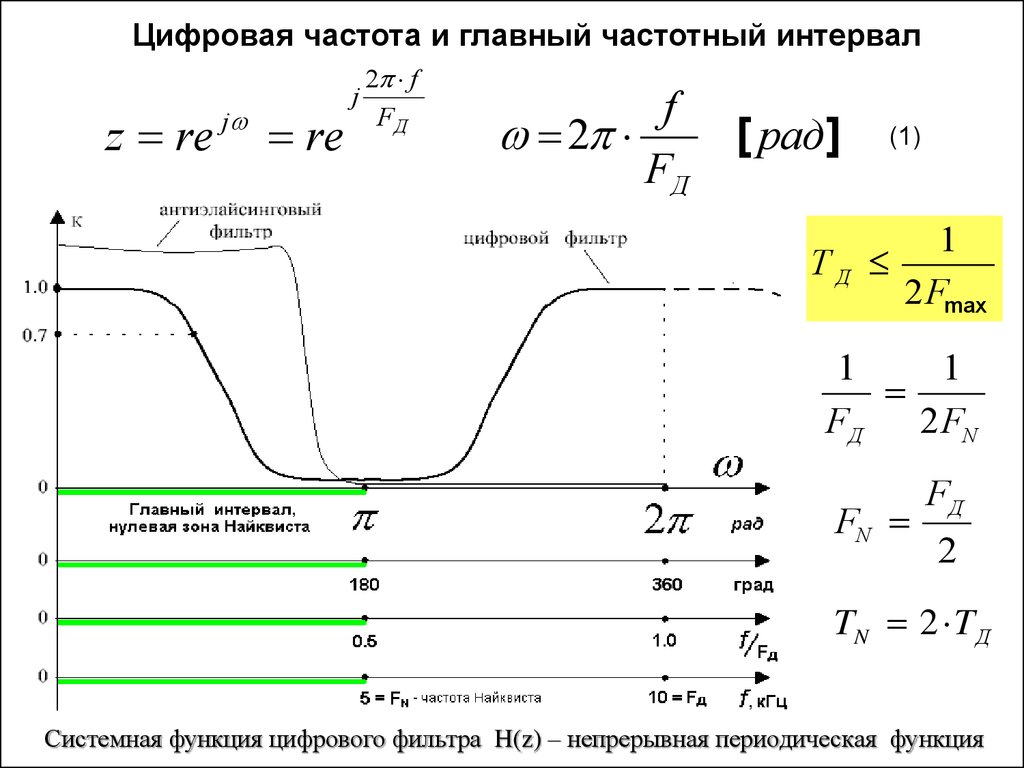
Цифровая частота и главный частотный интервалz re
j
re
j
2 f
FД
f
2
FД
[ рад]
ТД
(1)
1
2 Fmax
1
1
FД
2 FN
FN
FД
2
TN 2 T Д
Системная функция цифрового фильтра H(z) – непрерывная периодическая функция
17.
Линейные цифровые фильтры17
18.
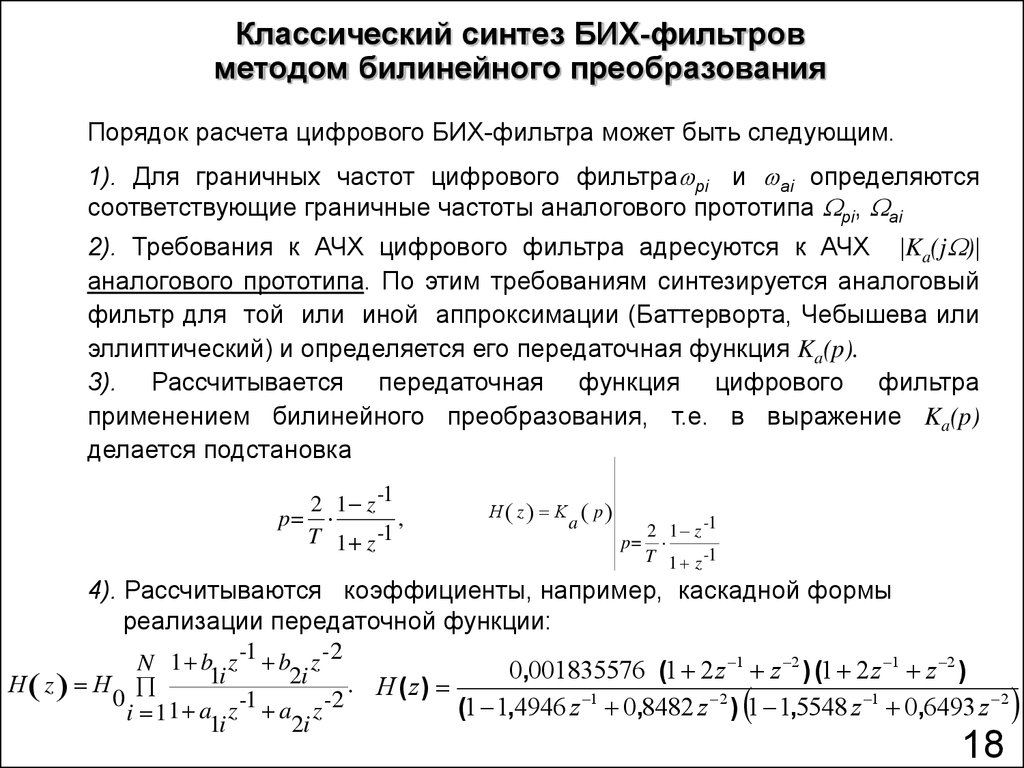
Классический синтез БИХ-фильтровметодом билинейного преобразования
Порядок расчета цифрового БИХ-фильтра может быть следующим.
1). Для граничных частот цифрового фильтра pi и ai определяются
соответствующие граничные частоты аналогового прототипа pi, ai
2). Требования к АЧХ цифрового фильтра адресуются к АЧХ Ka(j )
аналогового прототипа. По этим требованиям синтезируется аналоговый
фильтр для той или иной аппроксимации (Баттерворта, Чебышева или
эллиптический) и определяется его передаточная функция Ka(p).
3). Рассчитывается передаточная функция цифрового фильтра
применением билинейного преобразования, т.е. в выражение Ka(p)
делается подстановка
2 1 z -1
p=
,
T 1 z -1
Η z Κ
a
p
2 1 z -1
p=
T 1 z -1
4). Рассчитываются коэффициенты, например, каскадной формы
реализации передаточной функции:
N 1 b z -1 b z -2
0,001835576 (1 2 z 1 z 2 ) (1 2 z 1 z 2 )
1
i
2
i
Η z Η
. H ( z)
0
1
2
(1 1,4946 z 1 0,8482 z 2 ) 1 1,5548 z 1 0,6493 z 2
i 11 a1i z a2i z
18
19.
Целочисленная модель цифрового рекурсивного фильтра(прямая форма)
{xn} – входная
последовательность
{уn} – выходная
yn –
последовательн.
отклик фильтра
2 R 1 ak 2 R 1
N – порядок
2 R 1 bk 2 R 1
N
y n
k 1
N
ak
bk
yn k
xn k
a0
k 0 a0
(6)
bk , ak , a0 – целочисленные коэффициенты
b0 b1 z 1 b2 z 2 ... bk z N
H ( z)
1
2
N
a0 a1 z a2 z ... ak z
Варьируемых параметров (коэффициентов) 2N
(7)
19
20.
Каскадное построение рекурсивного ЦНП-фильтра(последовательная форма)
{xn} – входная
последовательность
{уn} – выходная последовательн.
N – порядок фильтра
2 R 1 ak 2 R 1
2 R 1 bk 2 R 1
(1)
yn b0 xn b1 xn 1 b2 xn 2 a1 yn 1 a2 yn 2 a0
b0i b1i z 1 b2i z 2
H ( z)
1
2
a
a
z
a
z
i 1
0i
1i
2i
отклик звена
второго порядка
m
(2)
(3)
Zpi 1
коэффициент передачи
фильтра из m=N/2 звеньев
- условие устойчивости рекурсивного фильтра
Варьируемых параметров (коэффициентов) 3N
20
21.
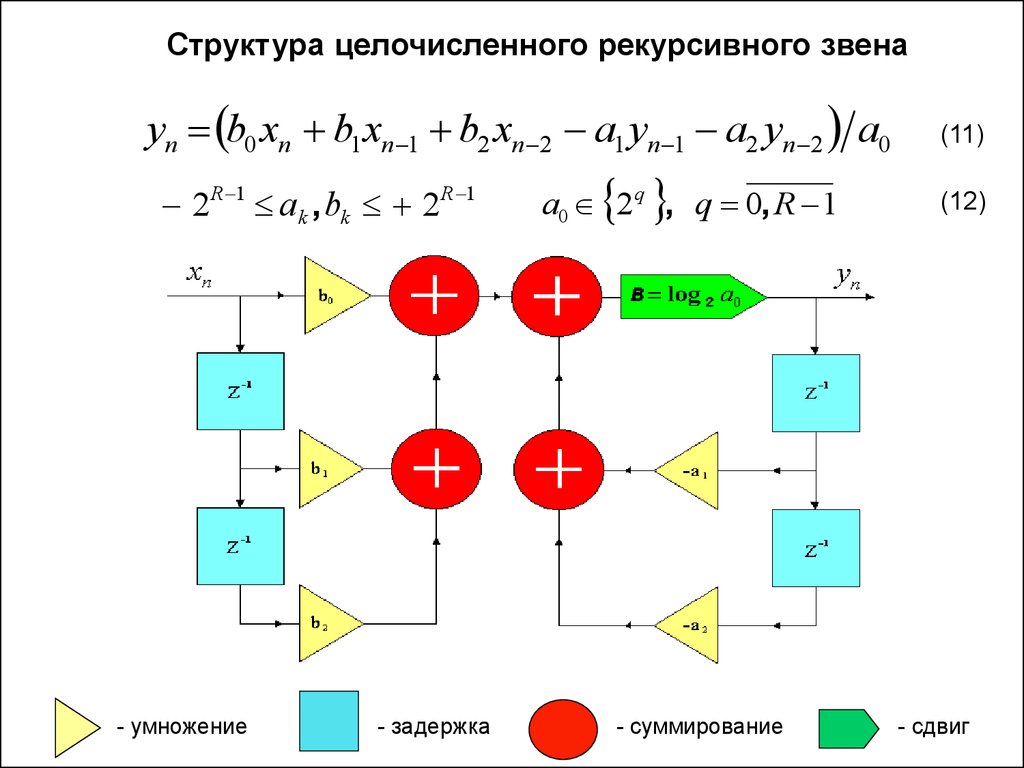
Структура целочисленного рекурсивного звенаyn b0 xn b1 xn 1 b2 xn 2 a1 yn 1 a2 yn 2 a0
2 R 1 ak , bk 2 R 1
- умножение
- задержка
a0 2q , q 0, R 1
- суммирование
(11)
(12)
- сдвиг
22.
Устойчивость и реализуемость рекурсивныхцифровых фильтров
Для реализуемости и устойчивости
передаточная функция должна
удовлетворять следующим услов:
1. Она должна быть рациональной
функцией с вещественными
коэффициентами
2. Порядок числителя не должен
превышать порядок знаменателя
3. Её полюсы должны лежать внутри
круга единичного радиуса на Zплоскости
S
h(k ) .
(1)
k
h(n) 0, n 0
- каузальность
1
2
b0i b1i z b2i z
H ( z)
1
2
a
a
z
a
z
i 1
0i
1i
2i
m
Zpi 1
22
23.
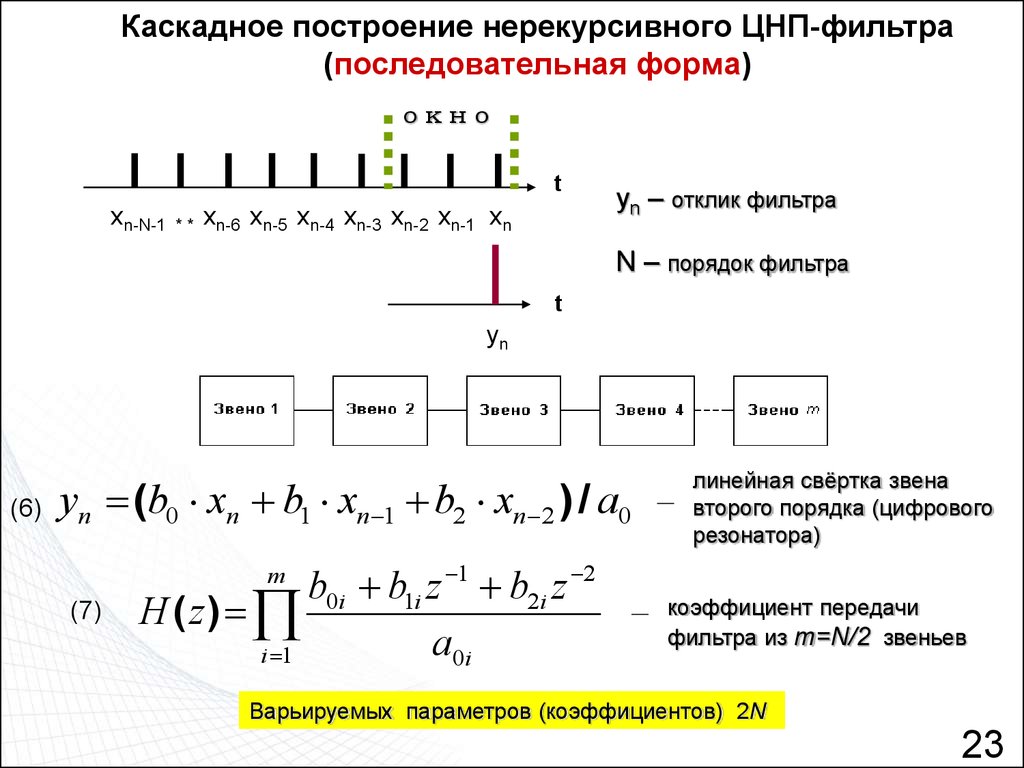
Каскадное построение нерекурсивного ЦНП-фильтра(последовательная форма)
окно
t
xn-N-1
**
xn-6 xn-5 xn-4 xn-3 xn-2 xn-1 xn
yn – отклик фильтра
N – порядок фильтра
t
yn
(6)
yn (b0 xn b1 xn 1 b2 xn 2 ) / a0
b0i b1i z 1 b2i z 2
H ( z)
a0i
i 1
линейная свёртка звена
второго порядка (цифрового
резонатора)
m
(7)
коэффициент передачи
фильтра из m=N/2 звеньев
Варьируемых параметров (коэффициентов) 2N
23
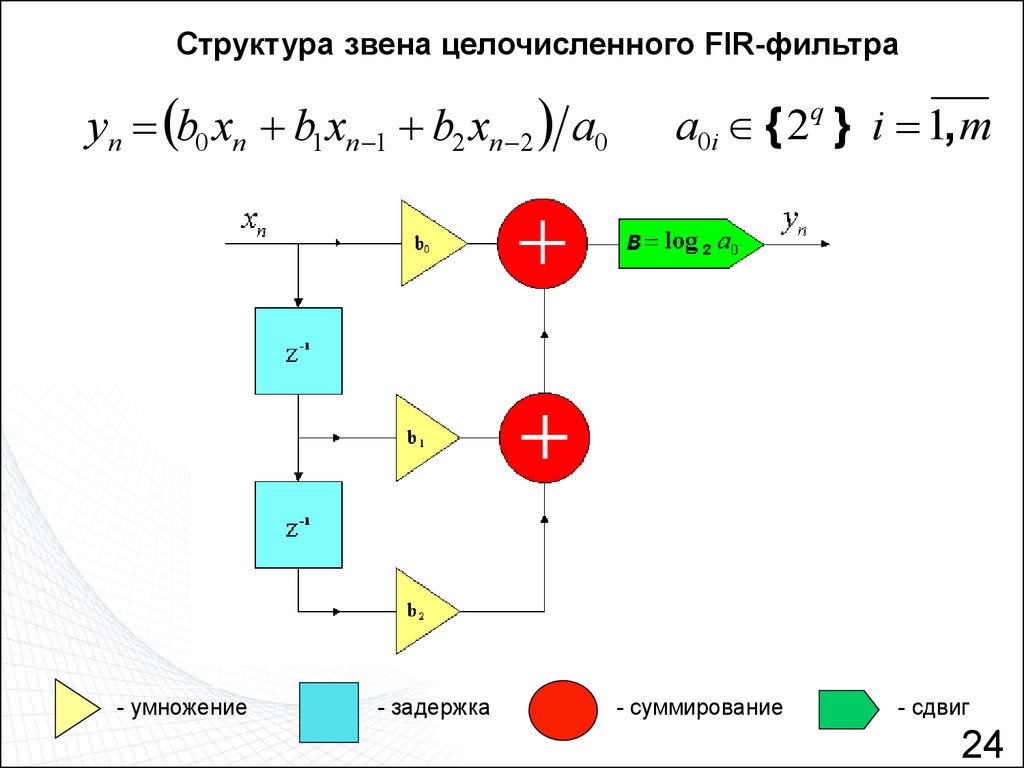
24.
Структура звена целочисленного FIR-фильтраyn b0 xn b1 xn 1 b2 xn 2 a0
- умножение
- задержка
a0i { 2q } i 1, m
- суммирование
- сдвиг
24
25.
Постановка задачи многофункциональногоЦНП-синтеза рекурсивного фильтра
o
o
F ( IX ) min F ( IX )
(1)
IX I 6 m
2 R 1 adi 2 R 1 1
2
R 1
bdi 2
R 1
a0i { 2q }
1
d 1,2 i 1, m
d 1,2 i 1, m
q 0, R 1
Z pi 1 i 1, m
K imin | K i (e j ) | K imax ,
где разрядность процессора R = 16
(2)
(3)
• Каскадная пятизвенная
структура фильтра (m=5)
• Синтез в целочисленном
30-мерном пространстве
параметров фильтра
• Прямые ограничения в
виде гиперкуба (2)
(4)
• Биномиальный ряд по
коэффициентам а0 (3)
(5)
• Условие устойчивости
фильтра (4)
• Масштабирование
усиления каскадов (5)
25
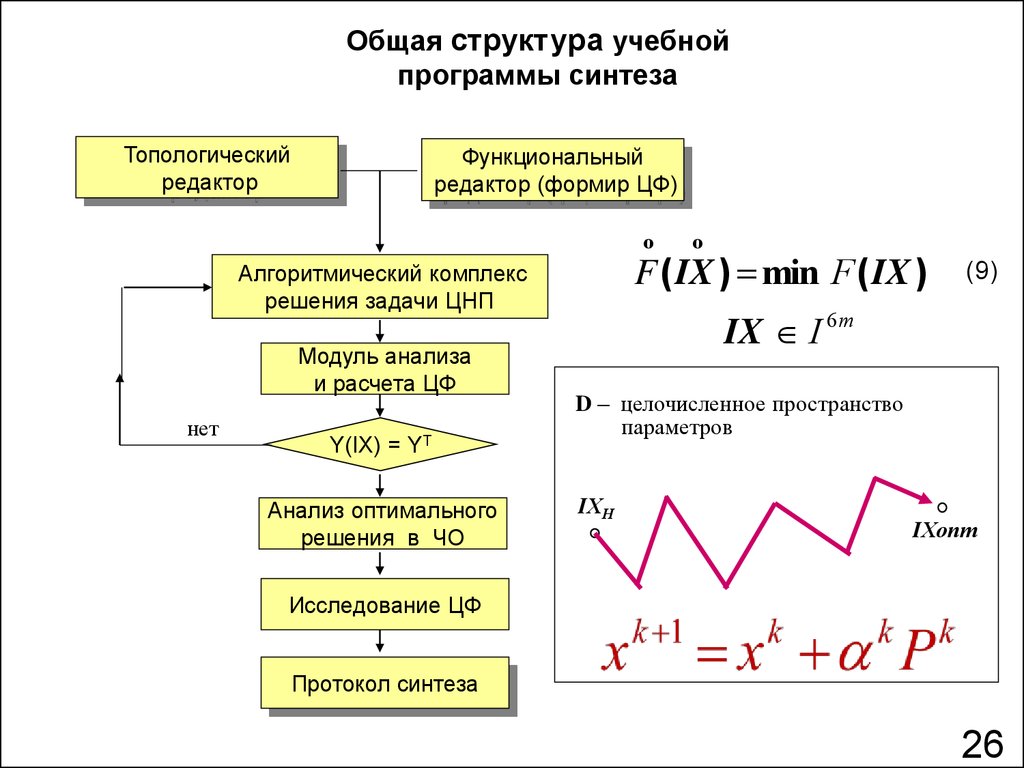
26.
Общая структура учебнойпрограммы синтеза
Топологический
редактор
Функциональный
редактор (формир ЦФ)
o
F ( IX ) min F ( IX )
Алгоритмический комплекс
решения задачи ЦНП
Модуль анализа
и расчета ЦФ
нет
Y(IX) = YT
Анализ оптимального
решения в ЧО
o
(9)
IX I 6 m
D – целочисленное пространство
параметров
IХН
IХопт
Исследование ЦФ
Протокол синтеза
26
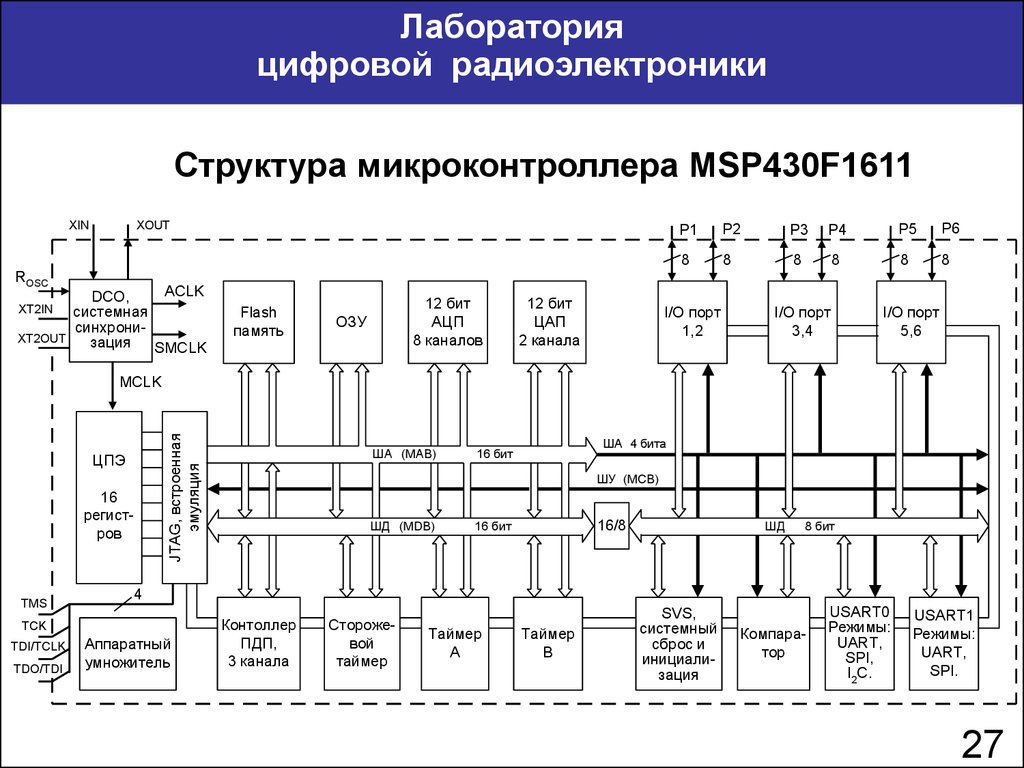
27.
Лабораторияцифровой радиоэлектроники
Структура микроконтроллера MSP430F1611
XIN
XOUT
P1
P2
P3
P4
P5
P6
8
8
8
8
8
8
ROSC
ACLK
DCO,
cистемная
синхрониXT2OUT
зация
SMCLK
XT2IN
Flash
память
12 бит
АЦП
8 каналов
ОЗУ
12 бит
ЦАП
2 канала
I/O порт
1,2
I/O порт
3,4
I/O порт
5,6
ЦПЭ
16
регистров
TMS
JTAG, встроенная
эмуляция
MCLK
TDO/TDI
ША 4 бита
16 бит
ШУ (MCB)
ШД (MDB)
16 бит
ШД
16/8
8 бит
4
TCK
TDI/TCLK
ША (MAB)
Аппаратный
умножитель
Контоллер
ПДП,
3 канала
Сторожевой
таймер
Таймер
A
Таймер
B
SVS,
cистемный
сброс и
инициализация
Компаратор
USART0
Режимы:
UART,
SPI,
I2C.
USART1
Режимы:
UART,
SPI.
27
28.
Микроконтроллер MSP430F1611В микропроцессорной системе процессор работает более
эффективно, если программный код и коды данных размещены в
памяти так, что есть возможность независимого к ним обращения. По
отношению к памяти раз-личают фоннеймановскую и гарвардскую
архитектуры процессоров.
Архитектура фон Неймана наиболее проста, т. к. программа и данные
фи-зически располагаются в одной и той же памяти. В результате за
один цикл обращения процессор может получить доступ либо к
программе, либо к данным.
Гарвардской архитектуре свойственны отдельные память программ и
память данных с использованием независимых аппаратных средств для
работы с данными и программным кодом.
Микроконтроллеры семейства MSP430 фирмы Texas Instrumenrs
постро-ены как машина фон Неймана с общей внутри кристалла
системной ма-гистралью, образованной 16-разрядной шиной адреса
ША (MAB – Memory Address Bus), 16-разрядной шиной данных ШД
(MDB – Memory Data Bus) и шиной управления ШУ (MCB – Memory
Control Bus).
28
29.
Микроконтроллер MSP430F1611При написании программ на МК необходимо учитывать архитектуру
ЦП и набор команд, с помощью которых реализуются
арифметические и логи-ческие операции, условные и безусловные
переходы, вызовы и возвраты из процедур, сохранение содержимого
регистров в памяти и загрузка данных из памяти в регистры, обмен
данными с портами (регистрами) ввода/вывода. Команды в памяти
представляются в виде двоичного кода, содержа-щего код
операции (КОП) и указание на то, где расположены операнды.
Программирование в двоичных кодах весьма трудоём-ко и для его
облегче-ния двоичным кодам команд сопоставляются мнемонические
обозначения, которые являются основой низкоуровневого языка
программирования – языка Ассемблера. Полный набор команд МК
семейства MSP430 включа-ет 27 команд ядра и 24 эмулированные
команды.
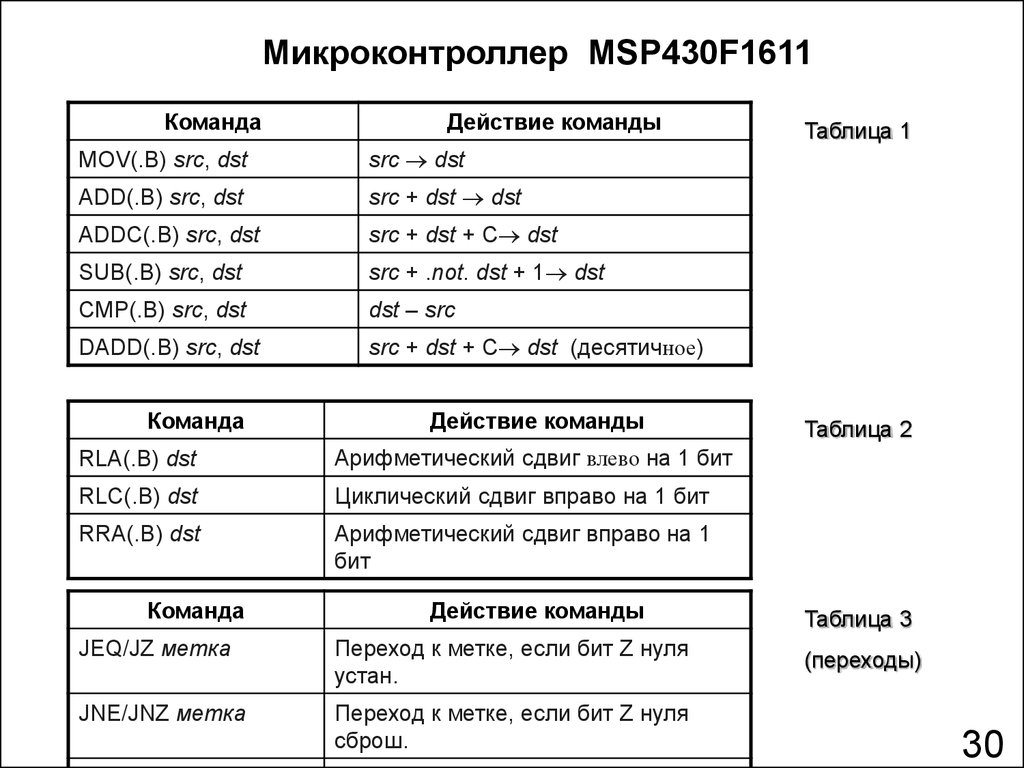
Существует три формата команд ядра:
а) с двойным операндом – с операндом-источником src и операндомприемником dst (таблица 1);
б) с одиночным операндом – с одним операндом-источником src или с
одним операндом-приемником dst (таблица 2);
в) команды перехода, вызова, возврата (таблица 3).
29
30.
Микроконтроллер MSP430F1611Команда
Действие команды
MOV(.B) src, dst
src dst
ADD(.B) src, dst
src + dst dst
ADDC(.B) src, dst
src + dst + C dst
SUB(.B) src, dst
src + .not. dst + 1 dst
CMP(.B) src, dst
dst – src
DADD(.B) src, dst
src + dst + C dst (десятичное)
Команда
Действие команды
RLA(.B) dst
Арифметический сдвиг влево на 1 бит
RLC(.B) dst
Циклический сдвиг вправо на 1 бит
RRA(.B) dst
Арифметический сдвиг вправо на 1
бит
Команда
Действие команды
JEQ/JZ метка
Переход к метке, если бит Z нуля
устан.
JNE/JNZ метка
Переход к метке, если бит Z нуля
сброш.
Таблица 1
Таблица 2
Таблица 3
(переходы)
30
31.
Экспериментальная измерительная установка1. Моделирования и синтеза цифровых ЦНП-фильтров
2. Среда IAR программирования
МК MSP430F1611
3. Цифровой панорамный измеритель ЧХ фильтра на реальном
сигнале (LabVIEW)
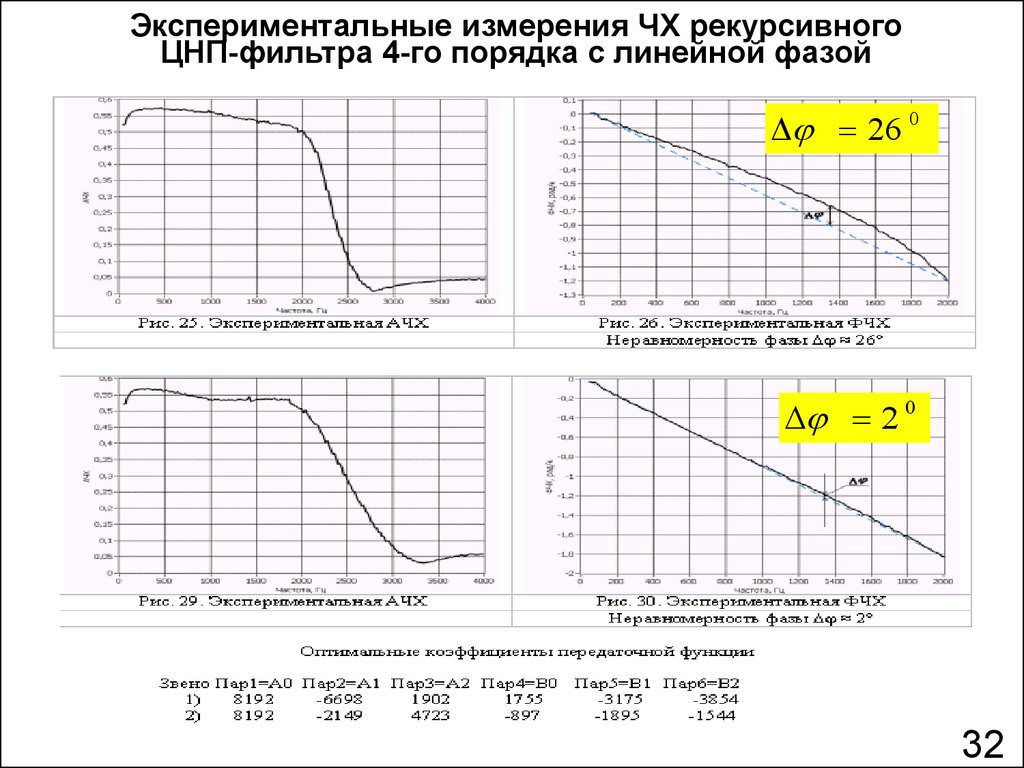
32.
Экспериментальные измерения ЧХ рекурсивногоЦНП-фильтра 4-го порядка с линейной фазой
Δ 26 0
Δ 2 0
32
33.
Лабораторияцифровой радиоэлектроники
Литература
1.
Мину
М.
Математическое
программирование.
Теория
и
алгоритмы. М., Наука, 1990, 488 с.
2.
Бугров
В.Н.
Проектирование
цифровых
фильтров
методами
целочисленного
нелинейного
программирования.
//
Вестник
ННГУ, 2009, № 6. с. 61 – 70.
3. Бугров В.Н., Лупов С.Ю., Земнюков
Н.Е.,
Корокозов
М.Н.
Дискретный
синтез
цифровых
рекурсивных
фильтров. // Вестник ННГУ, 2009, № 2. с. 76
– 82.
4. Шкелев Е.И. Электронные цифровые системы и
микропроцессоры. Учебное пособие. //Н.Новгород:
Изд.ННГУ, 2004 – 152 с.
33
34.
Лабораторияцифровой радиоэлектроники
34
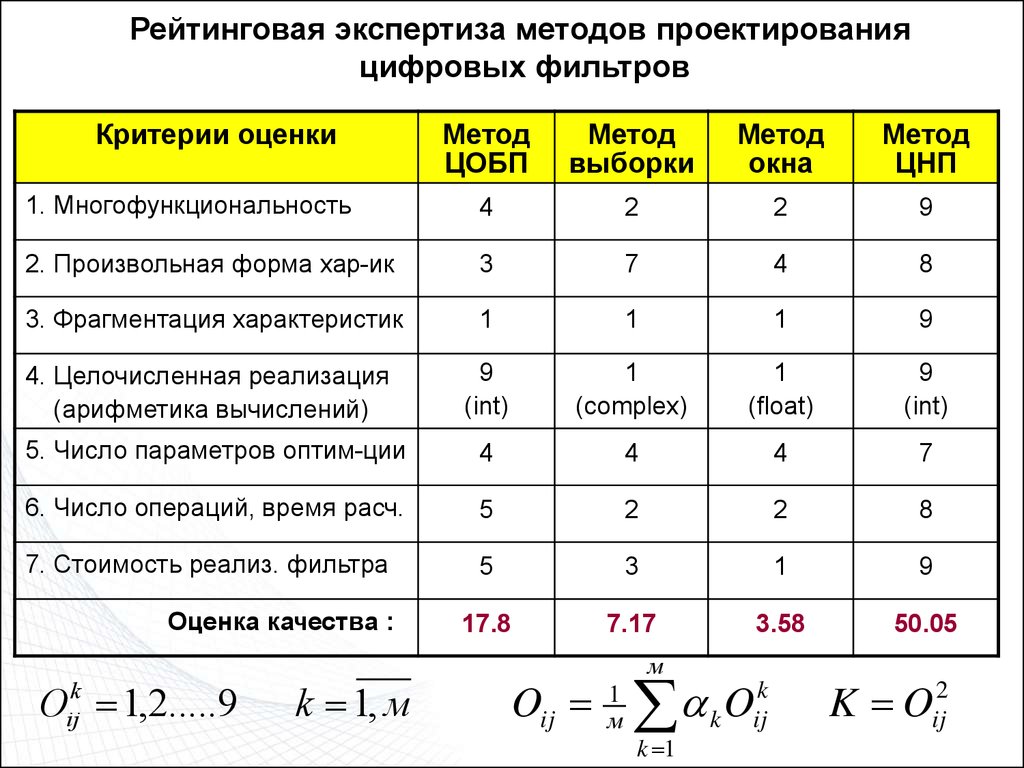
35.
Рейтинговая экспертиза методов проектированияцифровых фильтров
Критерии оценки
Метод
ЦОБП
Метод
выборки
Метод
окна
Метод
ЦНП
1. Многофункциональность
4
2
2
9
2. Произвольная форма хар-ик
3
7
4
8
3. Фрагментация характеристик
1
1
1
9
4. Целочисленная реализация
(арифметика вычислений)
9
(int)
1
(complex)
1
(float)
9
(int)
5. Число параметров оптим-ции
4
4
4
7
6. Число операций, время расч.
5
2
2
8
7. Стоимость реализ. фильтра
5
3
1
9
17.8
7.17
3.58
50.05
Оценка качества :
Oijk 1,2.....9
k 1, м
Oij
м
1
м
k
O
k ij
k 1
K Oij2