")







 mechanics
mechanics electronics
electronicsSimilar presentations:







")


RoboSurdoProject(RSP)
1. RoboSurdoProject(RSP)
2.
Целью проекта RSP являетсясоздание
роботизированной
антропоморфной руки способной
демонстрировать жесты и дактиль
РЖЯ.
3.
Первый прототип RS1(Dandelion),
претерпел
ряд
технических
улучшений
относительно базового проекта на
который
опиралась
наша
команда. (TRHP1)
4.
RS1 « Dandelion »Изменения:
1. Дополнительная перфорация в отдельных узлах
сборки, для облегчения конструкции и уменьшения
используемого пластика.
2.Замена громоздкого блока управления с линейными
приводами на систему управления «Нагружение до
напряжения» (LUV – loading up voltage)
5.
Походу
решения
технических
вопросов,
параллельно
решалась
проблема с дизайном руки и с
созданием прототипа готового
решения в CADсистеме.
6.
В итоге в CAD системеInventor
была
собрана
действующая модель RS1,
проведён
кинематический
анализ пальцев кисти, а
также осуществлён рендер
фотореалистичного
изображения кисти руки для
презентации прототипа до
стадии создания реального
образца.
7.
Как только все модели были подготовлены кпечати на 3dпринтере, оставалось определиться с
самим принтером ,а также пластиком из которого
будет изготовлена деталь.
Для этого был проведён анализ нескольких
популярных 3dпринтеров и были изучены
технические характеристики видов пластика.
Выбор пал на 3dпринтер RUBOT BIG и PLA
пластик. Их подробные руководства прилагаются в
приложении к текущему проекту.
8.
3D принтер RUBOT BIGПараметр
Напряжение питания
Потребляемая мощность
Экструдирование пластика
~220 В
600 Вт
Габариты рабочего поля (X,Y, Z), мм
340х350х740
Высота слоя по оси Z, мм
Точность по осям X, Y, мм
0,1-0,3
Скорость перемещения по осям X, Y, мм/мин
Скорость перемещения по оси Z, мм/мин
Тип рабочего инструмента
45
100
Тип материала
Формат 3D модели
Подключение к компьютеру
Работа с SD карты
Два экструдера
Диаметр сопла 0,35 мм
Макс температура 270 град.
Диаметр нити 1,75 мм
PLA
STL
USB
Да
Рабочий стол
Подогрев до 60 град С
Внешние габариты, мм
700х700х1300
Характеристики рабочего инструмента
Вес, кг
Условия окружающей среды
Вытяжка
0,01
Температура: 15-25 град С
Необходима естественная
вентиляция
35
9.
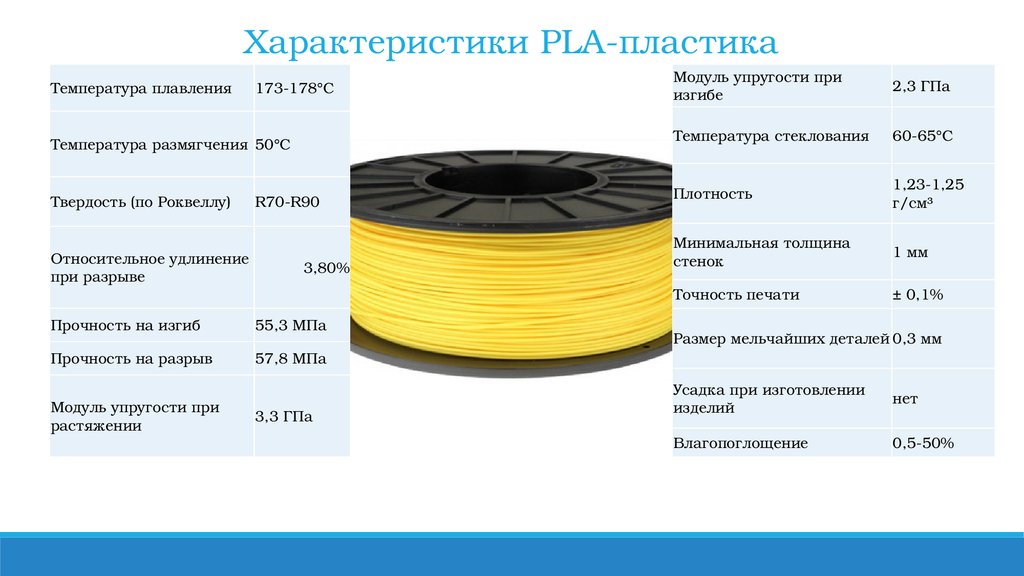
Характеристики PLAпластикаТемпература плавления
173178°C
Температура размягчения 50°C
Твердость (по Роквеллу)
Относительное удлинение
при разрыве
R70R90
3,80%
Прочность на изгиб
55,3 МПа
Прочность на разрыв
57,8 МПа
Модуль упругости при
растяжении
3,3 ГПа
Модуль упругости при
изгибе
2,3 ГПа
Температура стеклования
6065°C
Плотность
1,231,25
г/см³
Минимальная толщина
стенок
1 мм
Точность печати
± 0,1%
Размер мельчайших деталей 0,3 мм
Усадка при изготовлении
изделий
нет
Влагопоглощение
0,550%
10.
Печать длилась не один день и заняла большуючасть времени, масштаб печати выбран в 1.5 раза
больше стандартного размера по причине того,
что первый прототип легче модифицировать и
пересобирать именно в тех масштабах, что были
приняты. В дальнейшем нашлись и минусы этого
решения, но о них чуть позже.
11.
12.
Дляуправления
рукой
используется Arduino Uno, для
которой в целях удобства была
распечатана подложка,также в
RS1 используются
сервоприводы
FeeTech FT5519M.
Всё это объединено
в единый «стенд».
13.
Подробнеетрудностях:
о
системе
LUV
и
возникших
Идея системы такова, что все пальцы
изначально находятся в напряжённом состоянии
благодаря системе резинок, которые оттягивают
пальцы в «базовое» положение. Изза этого нам не
требуется использовать ещё один сервопривод,
чтобы вернуть палец в исходное положение.
14.
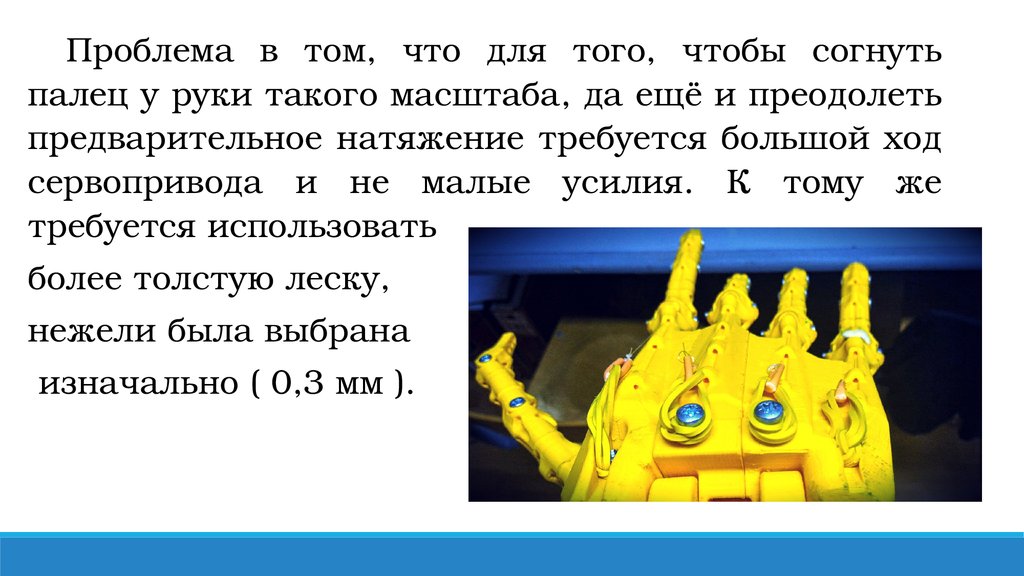
Проблема в том, что для того, чтобы согнутьпалец у руки такого масштаба, да ещё и преодолеть
предварительное натяжение требуется большой ход
сервопривода и не малые усилия. К тому же
требуется использовать
более толстую леску,
нежели была выбрана
изначально ( 0,3 мм ).
15.
Доработка прототипа «Dandelion»Полировка суставных частей для более гладкого
хода, замена лески на более прочную, увеличение
хода сервопривода, доработка «стенда».
Более серьёзные, конструктивные изменения уже
есть в мыслях, но будут применены к следующему
прототипу RS2.
16.
Дляэффективного
развития
проекта
требуется слаженная команда, своя мастерская,
отдельная очередь на печать 3dмоделей в
Технопарке
Университета,
своевременные
поставки необходимых материалов, а так же
достаточное количество свободного времени.
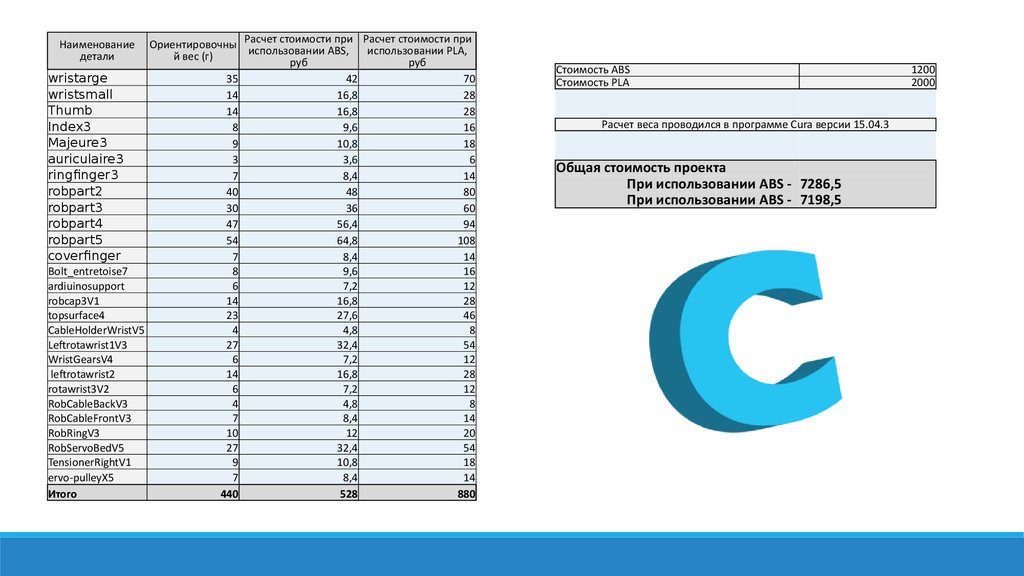
17.
Наименованиедетали
wristarge
wristsmall
Thumb
Index3
Majeure3
auriculaire3
ringfinger3
robpart2
robpart3
robpart4
robpart5
coverfinger
Bolt_entretoise7
ardiuinosupport
robcap3V1
topsurface4
CableHolderWristV5
Leftrotawrist1V3
WristGearsV4
leftrotawrist2
rotawrist3V2
RobCableBackV3
RobCableFrontV3
RobRingV3
RobServoBedV5
TensionerRightV1
ervo-pulleyX5
Итого
Ориентировочны Расчет стоимости при Расчет стоимости при
использовании ABS,
использовании PLA,
й вес (г)
руб
руб
35
14
14
8
9
3
7
40
30
47
54
7
8
6
14
23
4
27
6
14
6
4
7
10
27
9
7
440
42
16,8
16,8
9,6
10,8
3,6
8,4
48
36
56,4
64,8
8,4
9,6
7,2
16,8
27,6
4,8
32,4
7,2
16,8
7,2
4,8
8,4
12
32,4
10,8
8,4
528
70
28
28
16
18
6
14
80
60
94
108
14
16
12
28
46
8
54
12
28
12
8
14
20
54
18
14
880
Стоимость ABS
Стоимость PLA
Расчет веса проводился в программе Cura версии 15.04.3
Общая стоимость проекта
При использовании ABS - 7286,5
При использовании ABS - 7198,5
1200
2000
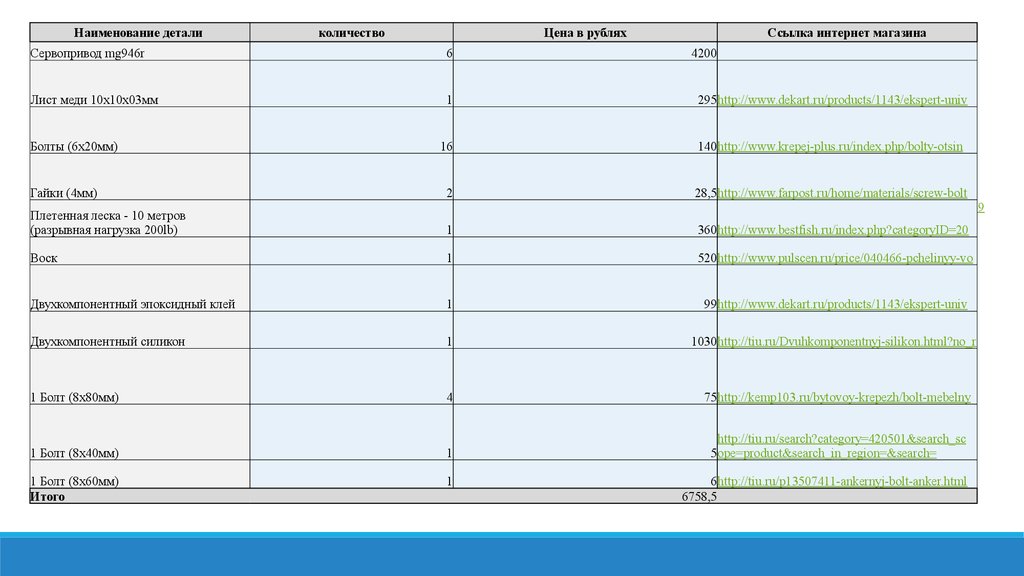
18.
Наименование деталиколичество
Цена в рублях
Ссылка интернет магазина
Сервопривод mg946r
6
Лист меди 10х10х03мм
1
295http://www.dekart.ru/products/1143/ekspert-univ
ersalnyi-dvuhkomponentnyi-epoksidnyi-klei
16
140http://www.krepej-plus.ru/index.php/bolty-otsin
kovannye/bolty-otsinkovannye-6kh20mm.html
Болты (6х20мм)
4200
Гайки (4мм)
2
28,5http://www.farpost.ru/home/materials/screw-bolt
/gajka-barashkovaja-partner-4mm-2sht-g558649249
.html
360http://www.bestfish.ru/index.php?categoryID=20
Плетенная леска - 10 метров
(разрывная нагрузка 200lb)
1
Воск
1
520http://www.pulscen.ru/price/040466-pchelinyy-vo
sk
Двухкомпонентный эпоксидный клей
1
99http://www.dekart.ru/products/1143/ekspert-univ
ersalnyi-dvuhkomponentnyi-epoksidnyi-klei
Двухкомпонентный силикон
1
1030http://tiu.ru/Dvuhkomponentnyj-silikon.html?no_r
edirect=1
1 Болт (8х80мм)
4
1 Болт (8х40мм)
1
1 Болт (8х60мм)
Итого
1
75http://kemp103.ru/bytovoy-krepezh/bolt-mebelny
y-mister-fix-8kh80mm-polukruglaya-golovka-4sht
-65616-170842013.html
http://tiu.ru/search?category=420501&search_sc
5 ope=product&search_in_region=&search=
Найти&search_term=1+Болт+%288х40мм%29
6http://tiu.ru/p13507411-ankernyj-bolt-anker.html
6758,5