







 physics
physicsSimilar presentations:










Физические основы механики
1. Раздел: Физические основы механики
РАЗДЕЛ: ФИЗИЧЕСКИЕОСНОВЫ МЕХАНИКИ
Тема: Введение в физику.
Кинематика поступательного и
вращательного движений
2.
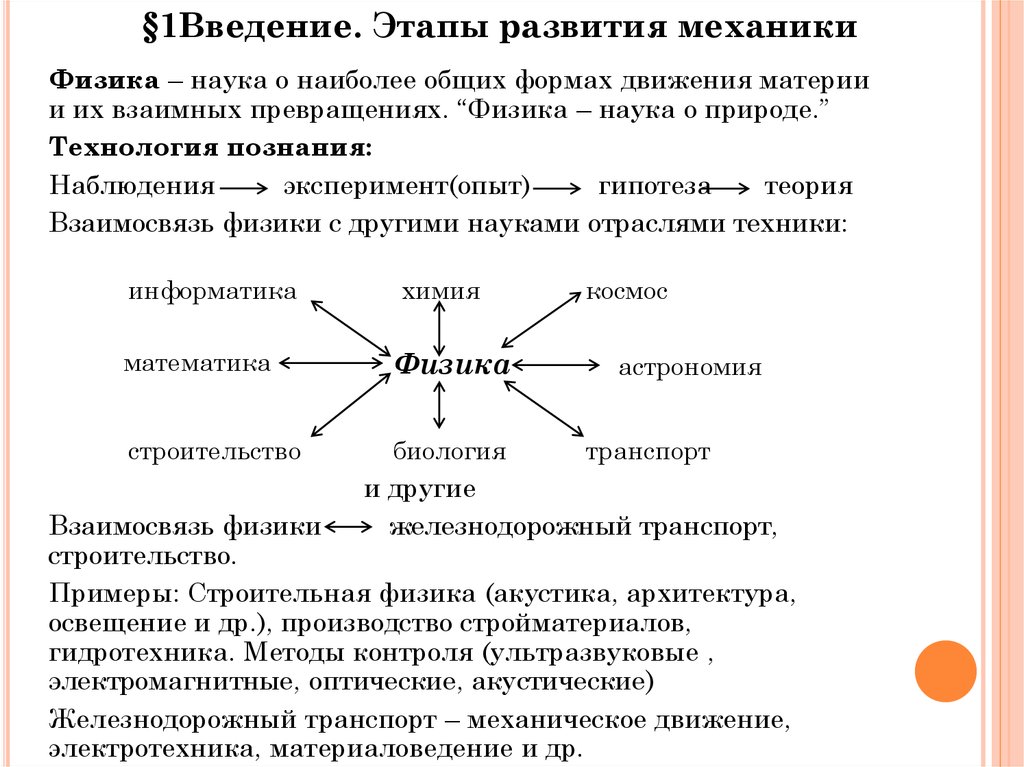
§1Введение. Этапы развития механикиФизика – наука о наиболее общих формах движения материи
и их взаимных превращениях. “Физика – наука о природе.”
Технология познания:
Наблюдения
эксперимент(опыт)
гипотеза
теория
Взаимосвязь физики с другими науками отраслями техники:
информатика
химия
математика
Физика
строительство
биология
космос
астрономия
транспорт
и другие
железнодорожный транспорт,
Взаимосвязь физики
строительство.
Примеры: Строительная физика (акустика, архитектура,
освещение и др.), производство стройматериалов,
гидротехника. Методы контроля (ультразвуковые ,
электромагнитные, оптические, акустические)
Железнодорожный транспорт – механическое движение,
электротехника, материаловедение и др.
3.
Основные научные направления:• Управление термоядерным синтезом – ядерная
энергетика
• Получение материалов с заданными свойствами.
Нанотехнологии (
м)
• Лазерная техника
• Экология. Создание безопасных технологий для среды
обитания человека
Понятие материи – объективная реальность!
Два вида материи: 1) в виде вещества;
2) в виде “поля” – невидимый вид (поле
тяготения , гравитационное,
электромагнитное, магнитное,
электрическое, ядерное, слабое и др.)
Движение – изменение состояния материи
4.
Основные виды движения:• Механическое ; химическое; тепловое; биологическое;
социальное
Наиболее простое движение – механическое.
Этапы развития механики.
1-этап (до н.э. – 400-300 лет). Школы Аристотеля,
Архимеда, Демокрита (понятия рычага, клина, весы,
гидростатика, плавление тел)
2- этап (17-20 в.в.) создание классической механики (v<<c,
скорости тел малы по сравнению со скоростью света в
вакууме) Галилей, Ньютон, затем Эйлер, Лагранж,
Лаплас, Остроградский, Жуковский и др. (19-20в.)
3-этап (20в.) Создание релятивистской механики (v≈c)
Мы изучаем классическую физику.
Разделы классической механики: кинематика, динамика
и статика.
5.
§2 Понятия поступательного и вращательногодвижений
Любое сложное движение
можно разбить на два
движения
поступательное движение
вращательное движение
Поступательное движение – это движение, при котором
любая прямая, жестко связанная с движущимся телом,
остается параллельной своему первоначальному
положению.
Вращательное движение – это такое движение, при
котором все его точки движутся по окружностям, а центры
окружностей находятся на одной прямой (ось вращения).
6.
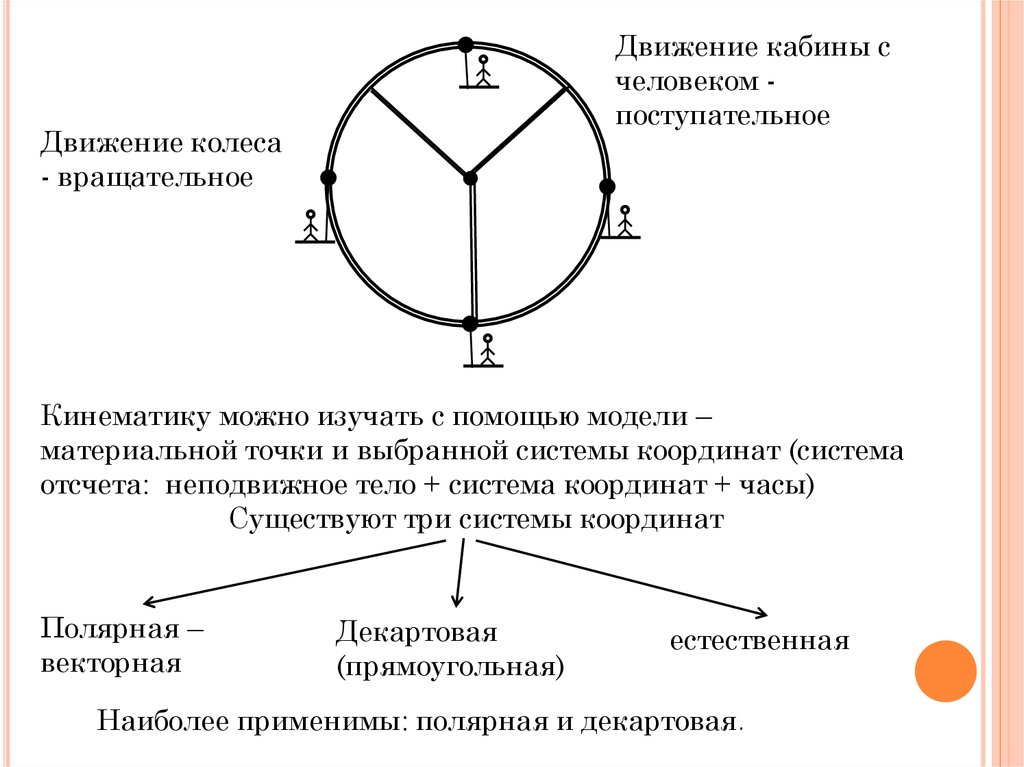
Движение кабины счеловеком поступательное
Движение колеса
- вращательное
Кинематику можно изучать с помощью модели –
материальной точки и выбранной системы координат (система
отсчета: неподвижное тело + система координат + часы)
Существуют три системы координат
Полярная –
векторная
Декартовая
(прямоугольная)
естественная
Наиболее применимы: полярная и декартовая.
7.
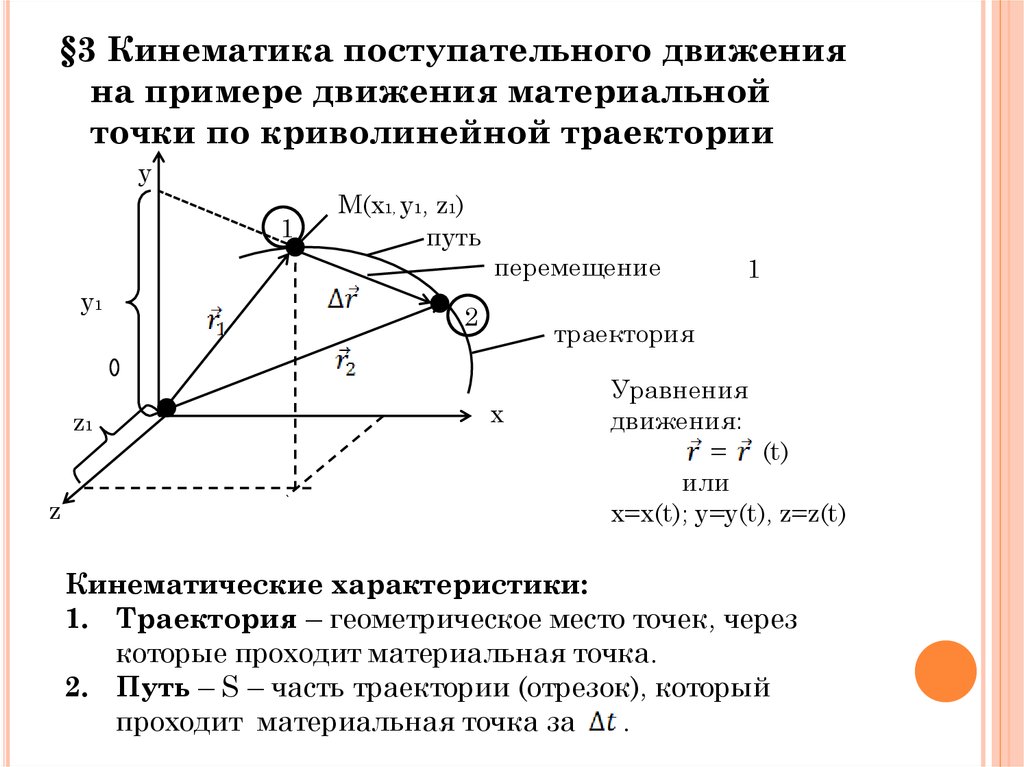
§3 Кинематика поступательного движенияна примере движения материальной
точки по криволинейной траектории
y
1
у1
z1
z
M(x1, y1, z1)
путь
перемещение
2
1
траектория
x
Уравнения
движения:
= (t)
или
х=х(t); y=y(t), z=z(t)
Кинематические характеристики:
1. Траектория – геометрическое место точек, через
которые проходит материальная точка.
2. Путь – S – часть траектории (отрезок), который
проходит материальная точка за
.
8.
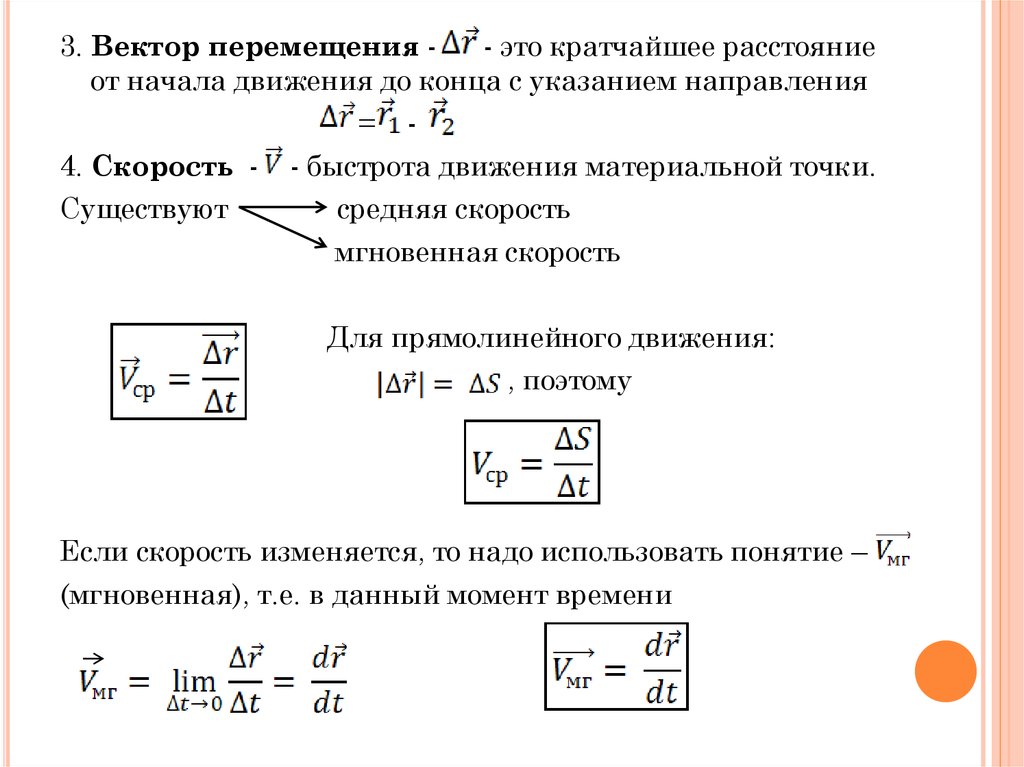
3. Вектор перемещения - это кратчайшее расстояниеот начала движения до конца с указанием направления
= 4. Скорость - - быстрота движения материальной точки.
Существуют
средняя скорость
мгновенная скорость
Для прямолинейного движения:
, поэтому
Если скорость изменяется, то надо использовать понятие –
(мгновенная), т.е. в данный момент времени
9.
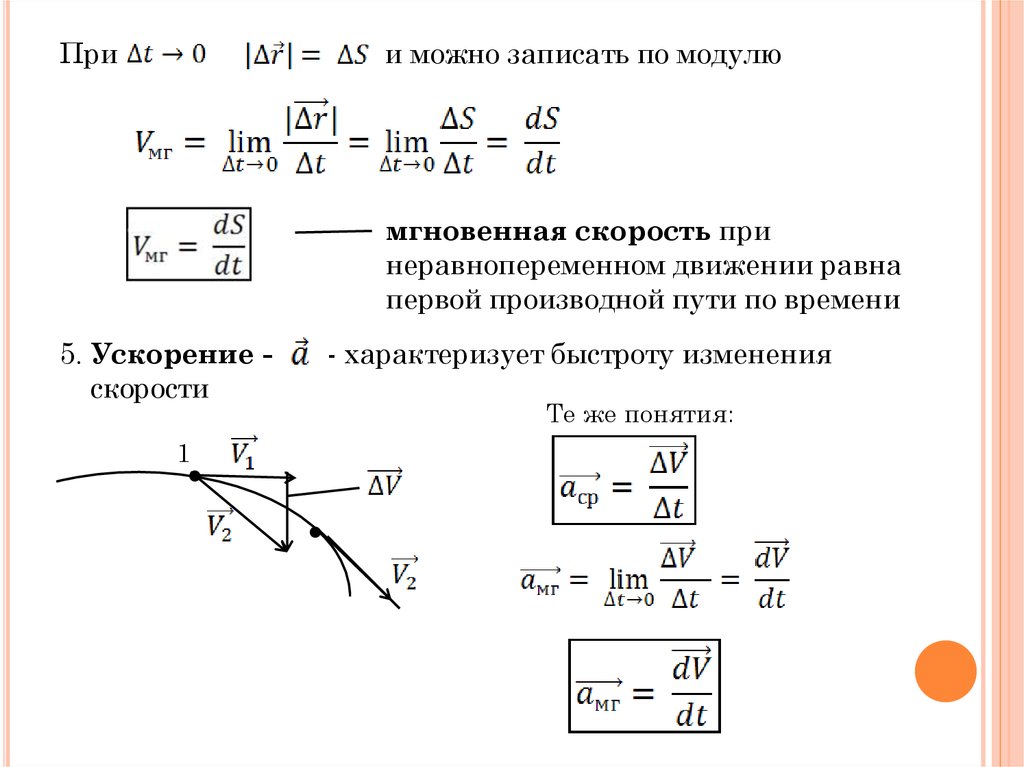
Прии можно записать по модулю
мгновенная скорость при
неравнопеременном движении равна
первой производной пути по времени
5. Ускорение скорости
1
- характеризует быстроту изменения
Те же понятия:
10.
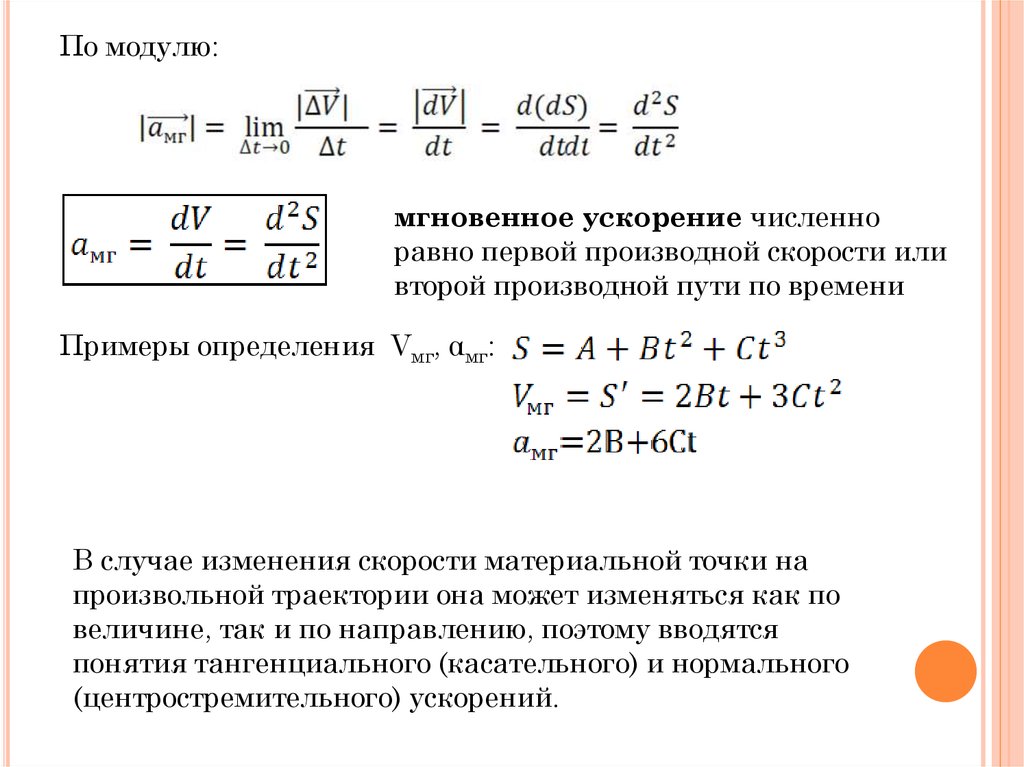
По модулю:мгновенное ускорение численно
равно первой производной скорости или
второй производной пути по времени
Примеры определения Vмг, αмг:
В случае изменения скорости материальной точки на
произвольной траектории она может изменяться как по
величине, так и по направлению, поэтому вводятся
понятия тангенциального (касательного) и нормального
(центростремительного) ускорений.
11.
C2
1
A
B
общее изменение
скорости
изменение
скорости по
направлению
Изменение
скорости по
величине
нормальное
тангенциальное
(центростре(касательное)
мительное )
12.
По модулю:Направление
и
движение ускоряется
движение замедляется
Модуль общего ускорения α определяется из
геометрического построения векторов
и
Следовательно, кинематическими характеристиками
поступательного движения являются:
1. S – путь 2.
- перемещение 3. - скорость
4. - ускорение 5. t – время.
13.
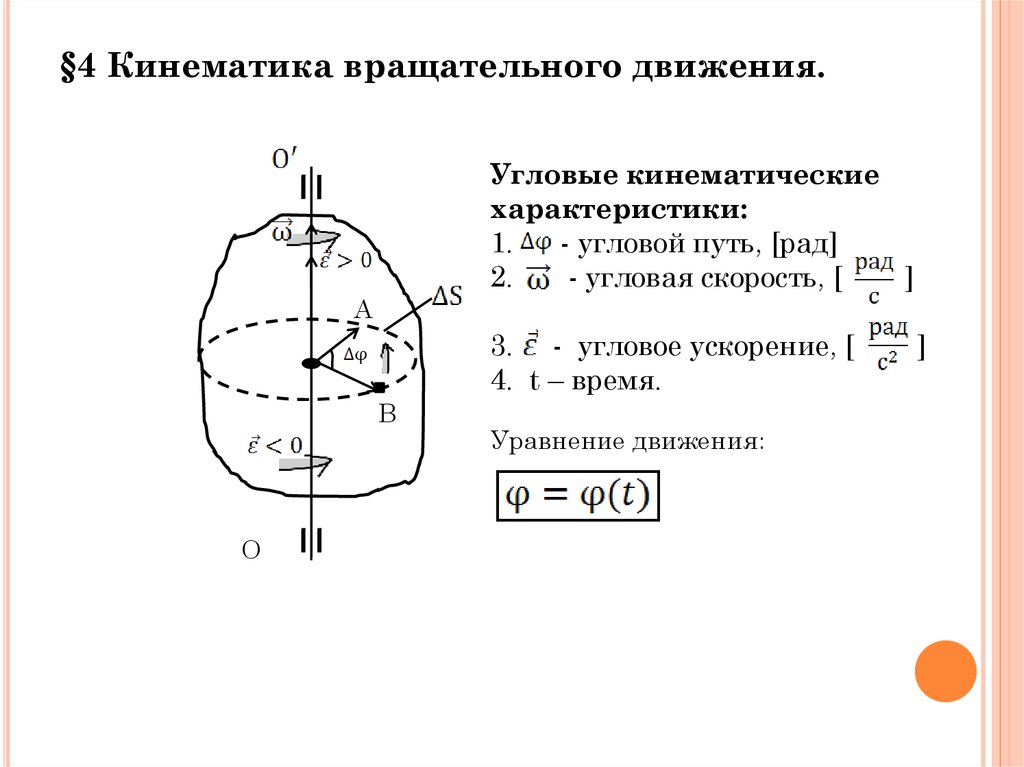
§4 Кинематика вращательного движения.Угловые кинематические
характеристики:
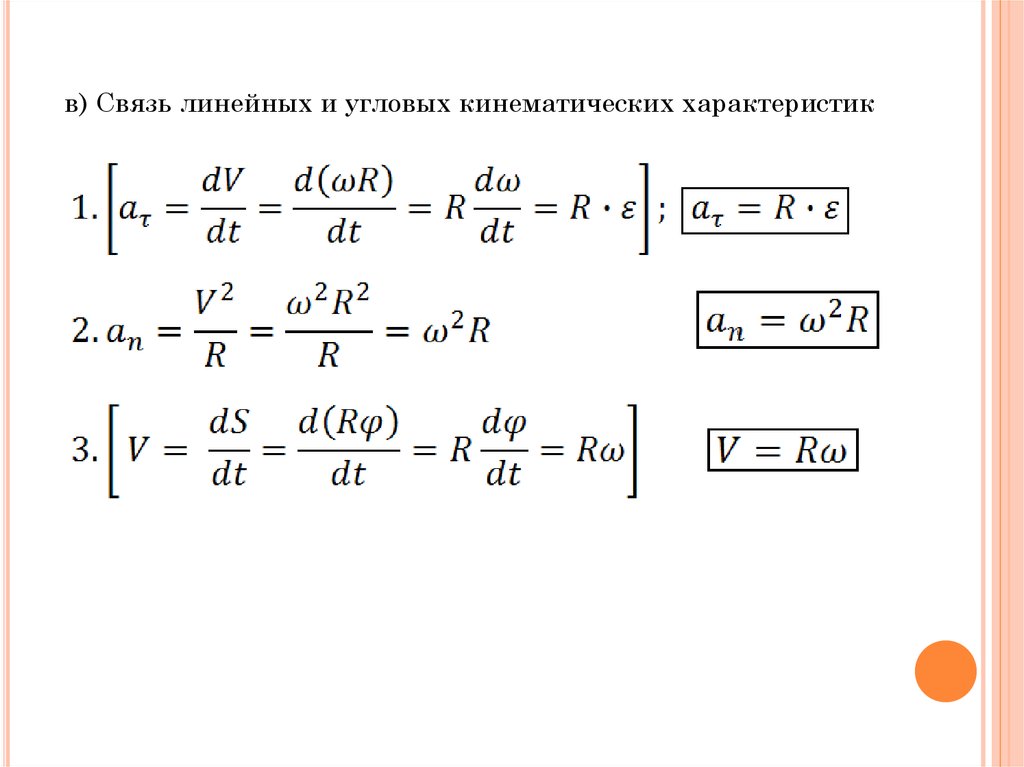
1.
- угловой путь, [рад]
2.
- угловая скорость, [
]
A
3. - угловое ускорение, [
4. t – время.
B
О
Уравнение движения:
]
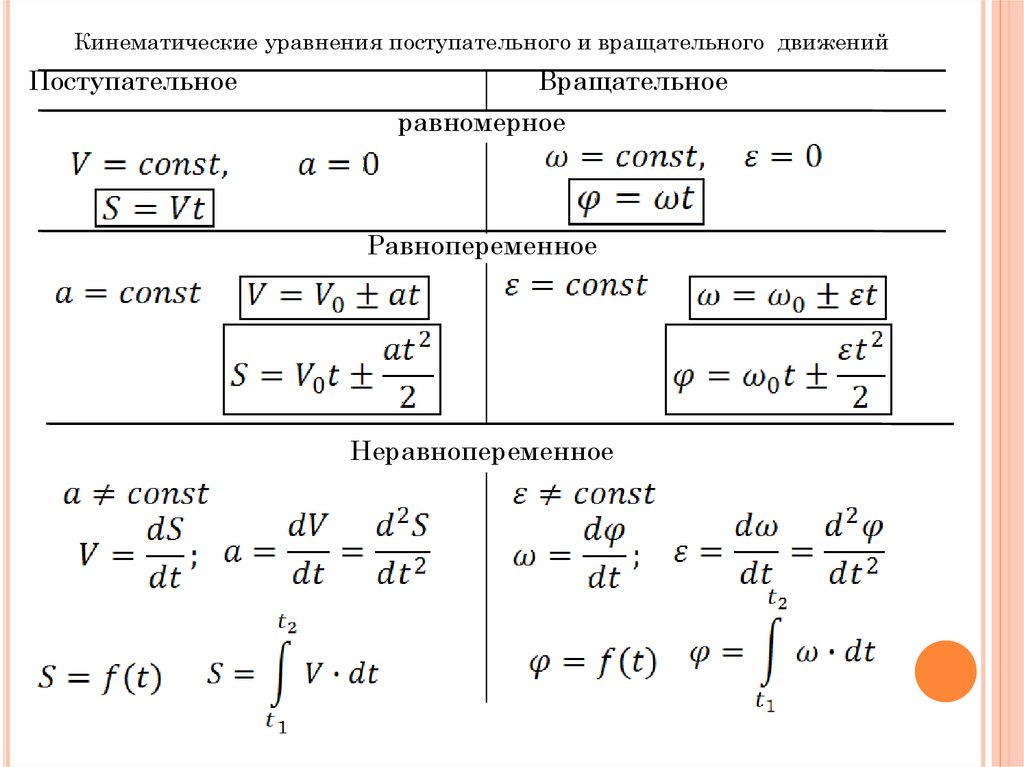
14.
а) угловаяскорость:
[
]
[
]
- аксиальный вектор определяет положение оси вращения,
направление вращения и быстроту вращения.
- скользящий вектор лежит на оси вращения, направлен в
сторону определяемую правилом правого винта (буравчика)
Наряду с физическим понятием угловой скорости
в технике
используется понятие технической скорости