











 physics
physicsSimilar presentations:










Физические основы механики
1. Лекция №1. Физические основы механики
План:1.
2.
3.
4.
5.
6.
Введение
Основные представления кинематики и динамики
Динамика вращательного движения твердого тела
Движение в неинерциальных системах отсчета
Механика жидкостей и газов
Колебания
2. 1. Введение
Предмет физикиФизика - наука о наиболее простых и вместе с тем
наиболее общих формах движения материи и их
взаимных превращениях. Изучаемые физикой формы
движения материи (механическая, тепловая и др.)
присутствуют во всех высших и более сложных формах
движения материи (химических, биологических и др.).
Поэтому они, будучи наиболее простыми, являются в то
же время наиболее общими формами движения
материи.
3. Единицы физических величин
Опыт - основанное на практике чувственно-эмпирическоепознание объективной действительности, т.е. наблюдение
исследуемых явлений в точно учитываемых условиях,
позволяющих следить за ходом явлений и многократно
воспроизводить его при повторении этих условий.
Гипотеза - это научное предположение, выдвигаемое для
объяснения какого-либо явления и требующее проверки на
опыте и теоретического обоснования для того, чтобы стать
достоверной научной теорией.
В результате обобщения экспериментальных фактов, а также
результатов деятельности людей устанавливаются
физические законы - устойчивые повторяющиеся
объективные закономерности, существующие в природе.
4.
Наиболее важные законы устанавливают связь междуфизическими величинами, для чего необходимо эти
величины измерять.
Для построения системы единиц произвольно выбирают
единицы для нескольких не зависящих друг от друга
физических величин. Эти единицы называются
основными.
наиболее распространенной является Система
Интернациональная (СИ), которая строится на 7-ми
основных единицах: метр, килограмм, секунда, ампер,
кельвин, моль, кандела; и 2-х дополнительных: радиан и
стерадиан.
5. Физические основы механики
Архимед (287-212 до н.э.)Г. Галилей (1564-1642)
И. Ньютон (1643-1727)
Механика Галилея-Ньютона называется
классической механикой
6. 2. Основные представления кинематики и динамики
Механика делится на 3 раздела: 1) кинематику,динамику, 3) статику
2)
Кинематика изучает движение тел, не рассматривая
причины, которые это движение обусловливают.
Динамика изучает законы движения тел и причины,
которые вызывают или изменяют это движение.
Статика изучает законы равновесия системы тел.
(если известны законы движения тел, то из них можно
установить и законы равновесия; поэтому законы
статики отдельно от законов динамики физика не
рассматривает)
7. Физические модели механики
Материальная точка (МТ) - тело, обладающеемассой, размерами которого в данной задаче можно
пренебречь.
Произвольное макроскопическое тело или систему
тел можно мысленно разбить на малые
взаимодействующие между собой части, каждая из
которых рассматривается как МТ. Тогда изучение
движения системы тел сводится к изучению системы
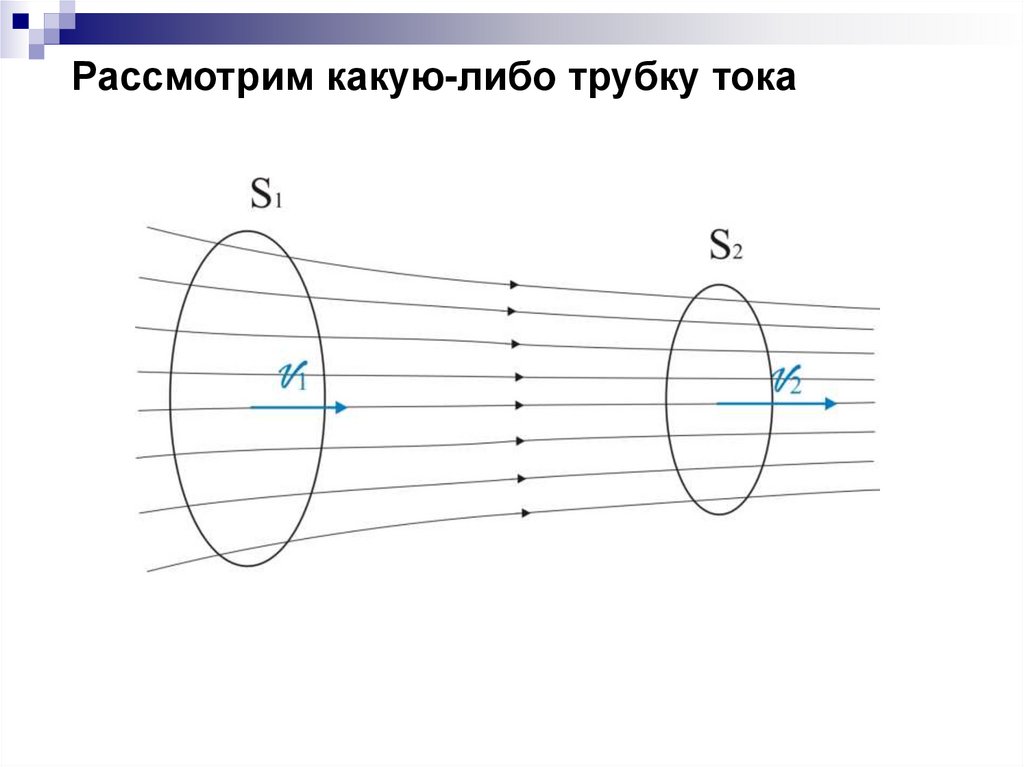
МТ.
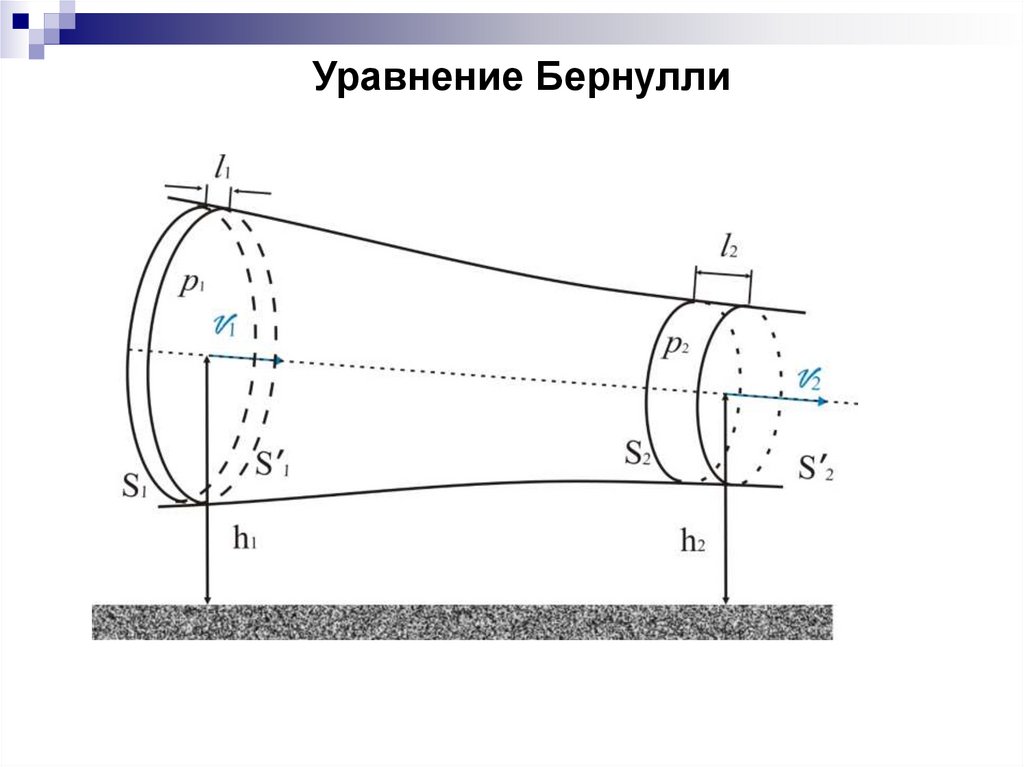
Абсолютно твердым телом называется тело,
которое ни при каких условиях не может
деформироваться и при всех условиях расстояние
между двумя точками этого тела остается
постоянным
8.
Поступательное движение - это движение, при которомлюбая прямая, жестко связанная с движущимся телом,
остается параллельной своему первоначальному
положению.
Вращательное движение - это движение, при котором
все точки тела движутся по окружностям, центры
которых лежат на одной и той же прямой, называемой
осью вращения.
Положение МТ определяется по отношению к какомулибо другому, произвольно выбранному телу,
называемому телом отсчета. С ним связывается
система отсчета - совокупность системы координат и
часов, связанных с телом отсчета.
9.
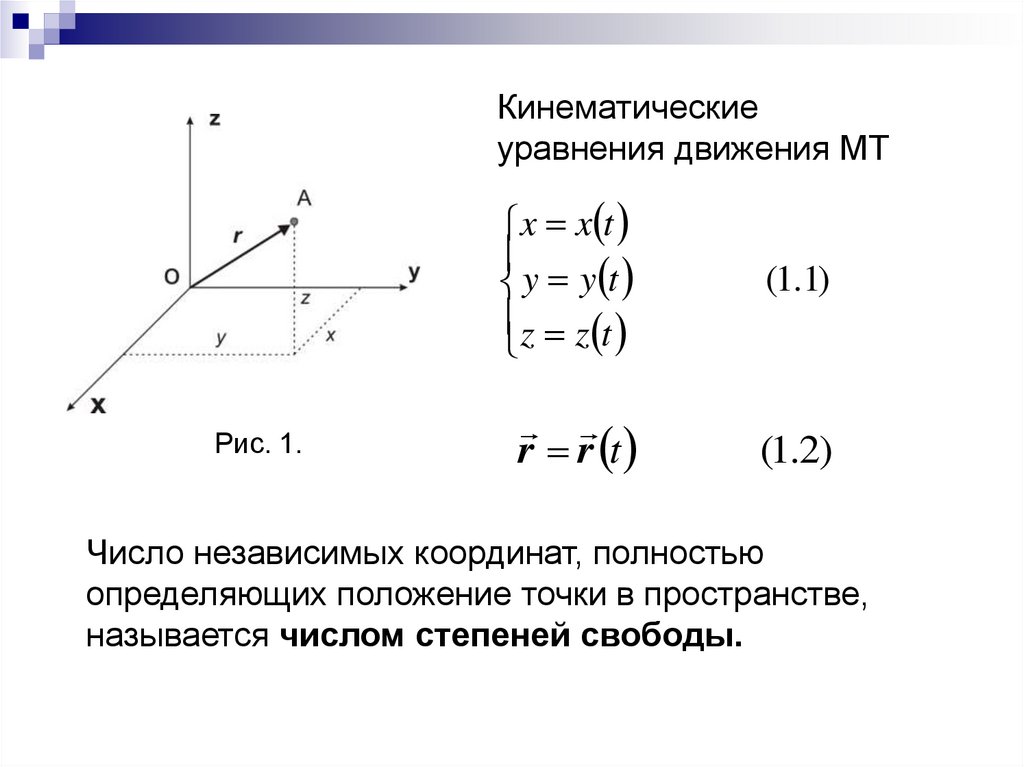
Кинематическиеуравнения движения МТ
Рис. 1.
x x t
y y t
z z t
(1.1)
r r t
(1.2)
Число независимых координат, полностью
определяющих положение точки в пространстве,
называется числом степеней свободы.
10.
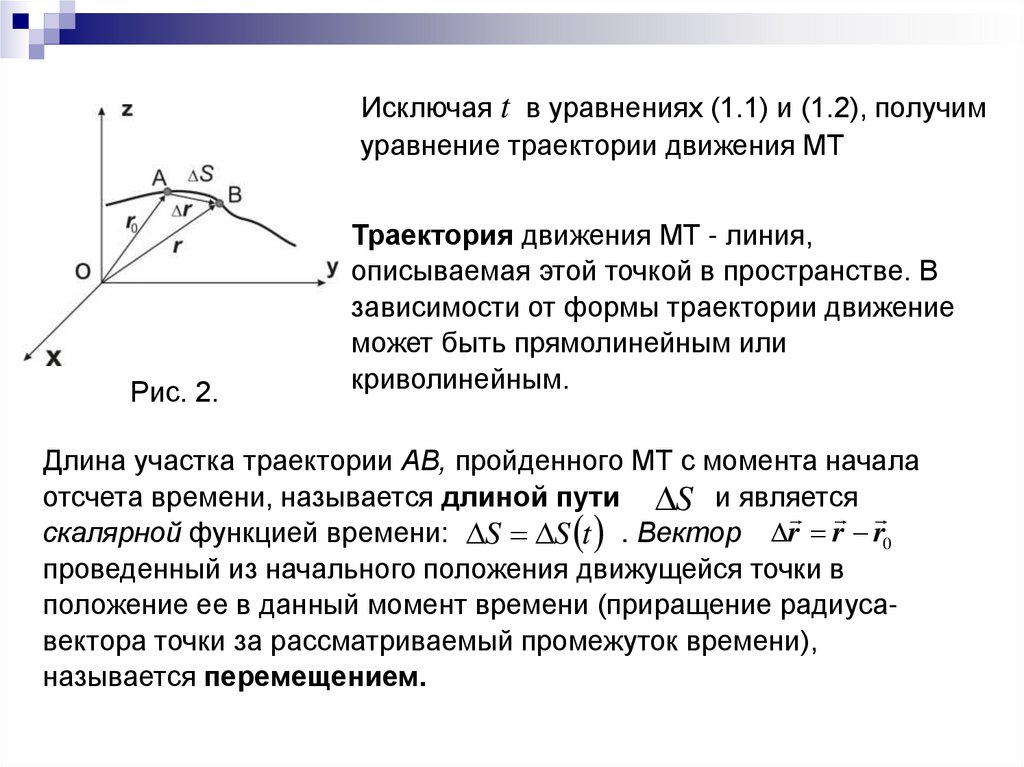
Исключая t в уравнениях (1.1) и (1.2), получимуравнение траектории движения МТ
Рис. 2.
Траектория движения МТ - линия,
описываемая этой точкой в пространстве. В
зависимости от формы траектории движение
может быть прямолинейным или
криволинейным.
Длина участка траектории АВ, пройденного МТ с момента начала
отсчета времени, называется длиной пути S и является
скалярной функцией времени: S S t . Вектор r r r0
проведенный из начального положения движущейся точки в
положение ее в данный момент времени (приращение радиусавектора точки за рассматриваемый промежуток времени),
называется перемещением.
11. Скорость
Для характеристики движения МТ вводится векторнаявеличина - скорость, которая определяется как быстроту
движения, так и его направление в данный момент времени.
r
Вектор средней скорости: υ
t
(1.3)
r dr
Мгновенная скорость: υ lim
t 0 t
dt
Мгновенная скорость υ , таким
образом, есть векторная величина, равная первой
производной радиуса-вектора движущейся точки по
времени, а модуль мгновенной скорости равен первой
ds
производной пути по времени:
υ
dt
12.
При неравномерном движении модуль мгновенной скорости стечением времени изменяется. В данном случае пользуются
скалярной величиной υ - средней скоростью неравномерного
движения:
s
υ
t
(1.4)
Если выражение ds υdt проинтегрировать по времени в
пределах от t1 до t 2 ,то найдем длину пути, пройденного точкой
за данный интервал времени
t2
s (t )dt
t1
(1.5)
13. Ускорение
В случае неравномерного движения важно знать, как быстроизменяется скорость с течением времени. Физической величиной,
характеризующей быстроту изменения скорости по модулю и
направлению, является ускорение.
Средним ускорением равномерного
движения в интервале от t до t t
называется векторная величина,
равная отношению изменения
скорости к интервалу времени t :
a
t
a
Мгновенным ускорением МТ в
момент времени t будет предел
среднего ускорения:
d
a lim a lim
t 0
t 0 t
dt
(1.4)
14.
Тангенциальная составляющая ускорения т.е. равна первойпроизводной по времени от модуля скорости, определяя тем
самым быстроту изменения скорости по модулю:
a lim
t 0 t
Нормальная составляющая ускорения и направлена по нормали
к траектории к центру ее кривизны (ее называют
центростремительным ускорением):
n
an lim
t 0 t
a
a an
Полное ускорение тела есть геометрическая сумма:
15. Угловая скорость и угловое ускорение
Угловая скорость:d
lim
t 0 t
dt
(1.5)
Линейная скорость:
S
R
lim
R lim
R
t 0 t
t 0 t
t 0 t
lim
в векторном виде: R
(1.6)
При const , то вращение можно охарактеризовать
периодом T 2
или частотой 1
Угловое ускорение:
T
d
dt
(1.7)
16.
Тангенциальная составляющая ускоренияd
d R
d
a
, R и a
R
R
dt
dt
dt
Нормальная составляющая ускорения
2 2R2
an
2R
R
R
ТО, связь между линейными и угловыми величинами
выражается следующими формулами:
S R , R , a R , an 2 R
В случае равнопеременного движения ( const ) :
t 2
0 t , 0t
2
(1.8)
17.
Динамика является основным разделом механики, в ееоснове лежат три закона Ньютона, сформулированные
им в 1687 г.
Первый з-н Ньютона: всякая МТ сохраняет состояние
покоя или равномерного прямолинейного движения до
тех пор, пока воздействие со стороны других тел не
заставит ее изменить это состояние (з-н инерции).
1-ый з-н Ньютона выполняется не во всякой системе
отсчета, а в инерциальной системе отсчета (ИСО).
ИСО отсчета является такая система, которая либо
покоится, либо движется равномерно и прямолинейно
относительно какой-то другой инерциальной системы.
18.
При одинаковых воздействиях различные тела неодинаковоизменяют скорость своего движения, т. е. приобретают
различные ускорения. Ускорение зависит не только от
величины воздействия, но и от свойств самого тела, от его
массы.
Масса тела - физическая величина, являющаяся одной из
основных характеристик материи, определяющая ее
инерционные и гравитационные свойства. Чтобы описывать
воздействия, упоминаемые в 1-м з-не Ньютона, вводят
понятие силы.
Сила — это векторная величина, являющаяся мерой
механического воздействия на тело со стороны других тел
или полей, в результате которого тело приобретает
ускорение или изменяет свою форму и размеры.
19.
Второй з-н Ньютона (основной зн динамикипоступательного движения) - отвечает на вопрос, как
изменяется механическое движение МТ действием
приложенных к ней сил.
Если рассмотреть действие различных сил на одно и то
же тело, то оказывается, что ускорение, приобретаемое
телом, всегда прямо пропорционально
равнодействующей приложенных сил:
a ~F при (m const )
(1.9)
При действии одной и той же силы на тела с разными
массами их ускорения оказываются
различными:
a ~ 1 при ( F const )
(2.0)
m
Используя выражения (1.9) и (2.0) и учитывая, что сила
и ускорение величины векторные, запишем:
F ma
(2.1)
20.
dF ma m
dt
Учитывая, что масса МТ в классической механике есть
величина постоянная, в выражении ее можно внести
под знак производной:
d m
F
(2.2)
dt
Векторная величина, p m называется импульсом
(количеством движения) МТ.
Тогда подставляя последнее выражение в формулу
(2.2), получим:
dp
F
(2.3)
dt
Более общая формулировка 2- з-на Ньютона:
скорость изменения импульса МТ равна действующей
на нее силе. Выражение (2.3) называется уравнением
движения материальной точки.
21.
Третий закон НьютонаВзаимодействие между МТ определяется 3-м законом Ньютона:
всякое действие МТ друг на друга носит характер
взаимодействия; силы, с которыми действуют друг на друга МТ,
всегда равны по модулю, противоположно направлены и
действуют вдоль прямой, соединяющей эти точки:
F12 F21
(2.4),
где F12 - сила, действующая на первую МТ точку со стороны
второй; F21 - сила, действующая на вторую МТ со стороны первой.
Эти силы приложены к разным МТ, всегда действуют парами и
являются силами одной природы.
3-й закон Ньютона позволяет осуществить переход от динамики
отдельной МТ к динамике системы МТ.
Для системы МТ взаимодействие сводится к силам парного
взаимодействия ними.
22.
Законы сохраненияТела образующие механическую систему (МС) могут
взаимодействовать как между собой, так и с телами, не
принадлежащими данной системе. В соответствии с этим
силы, действующие на тела системы подразделяют на
внутренние (силы с которыми на данное тело воздействуют
остальные тела системы) и внешние (силы, обусловленные
воздействием тел не принадлежащих системе).
Если внешние силы отсутствуют, то система называется
замкнутой (изолированной).
Для замкнутых систем оказываются неизменными 3
физические величины: энергия, импульс и момент импульса;
в соответствии с этим имеют место 3 закона сохранения. Эти
три закона тесно связаны с основными свойствами
пространства и времени и являются фундаментальными
законами природы.
23.
Закон сохранения импульса.Рассмотрим механическую систему, состоящую из n тел, масса
и
скорость которых соответственно равны m1 , m2 ,..., mn и 1 , 2 ,..., n
Пусть F1 , F2 ,..., Fn - равнодействующие внутренних
сил,
действующих на каждое из этих тел, a F1 , F2 ,..., Fn равнодействующие внешних сил.
Запишем 2-й з-н Ньютона для каждого из n тел МС:
d
m1 1 F1 F1
dt
d
m2 2 F2 F2
dt
..............................
d
mn n Fn Fn
dt
Складывая уравнения получаем:
24.
dm1 1 m2 2 mn n F1 F2 ... Fn F1 F2 ... Fn
dt
В механической системе, состоящей из многих тел, согласно 3-му
закону Ньютона, силы, действующие между этими телами, будут
равны и противоположно направлены, т.е. геометрическая сумма
внутренних сил равна нулю.
или
d
m1 1 m2 2 mn n F1 F2 ... Fn
dt
n
dp
, где p mi i - импульс системы
F1 F2 ... Fn
i 1
dt
Т.О., производная по времени от импульса механической системы
равна геометрической сумме внешних сил, действующих на
систему.
В случае отсутствия внешних сил (когда система замкнутая)
n
n
dp
d
p mi i const
(2.4)
mi i 0
dt i 1 dt
i 1
25.
Выражение (2.4) и является законом сохранения импульса:импульс замкнутой системы сохраняется, т.е. не изменяется с
течением времени.
Закон сохранения импульса справедлив не только в
классической физике (хотя он и получен как следствие
законов Ньютона), эксперименты доказывают, что он
выполняется и для замкнутых систем микрочастиц (они
подчиняются законам квантовой механики). Закон
сохранения импульса является следствием определенного
свойства симметрии пространства - его однородности.
Однородность пространства заключается в том, что при
параллельном переносе в пространстве замкнутой системы
тел, как целого, ее физические свойства и законы движения
не изменяются, иными словами, не зависят от выбора
положения начала координат инерциальной системы отсчета.
26.
В механике Галилея - Ньютона из-за независимости массы отскорости импульс системы может быть выражен через скорость ее
центра масс. Центром масс системы МТ называется воображаемая
точка С, положение которой характеризует распределение массы
этой системы. Ее радиус-вектор равен:
m
r
i i
n
rc i 1
m
где mi и ri - соответственноnмасса и радиус-вектор i -й МТ; n -
число МТ в системе; m mi
- масса системы.
drc
c
dt
i 1
Скорость центра масс:
из закона сохранения импульса вытекает, что центр масс
замкнутой системы либо движется прямолинейно и равномерно,
либо остается неподвижным.
27.
Энергия - универсальная мера различных форм движения ивзаимодействия. С различными формами движения материи
связывают различные формы энергии: механическую, тепловую,
электромагнитную, ядерную и др.
Чтобы количественно характеризовать процесс обмена энергией
между взаимодействующими телами, в механике вводится понятие
работы силы.
Если тело
движется прямолинейно и на него действует постоянная
сила F , которая составляет некоторый угол с направлением
перемещения, то работа этой силы равна произведению проекции
силы FS на направление перемещения, умноженной на
перемещение точки приложения силы:
A Fs s F s cos
(2.5)
В общем случае сила может изменяться по модулю и по
направлению, в этом случае формула (2.5) неприменима
28.
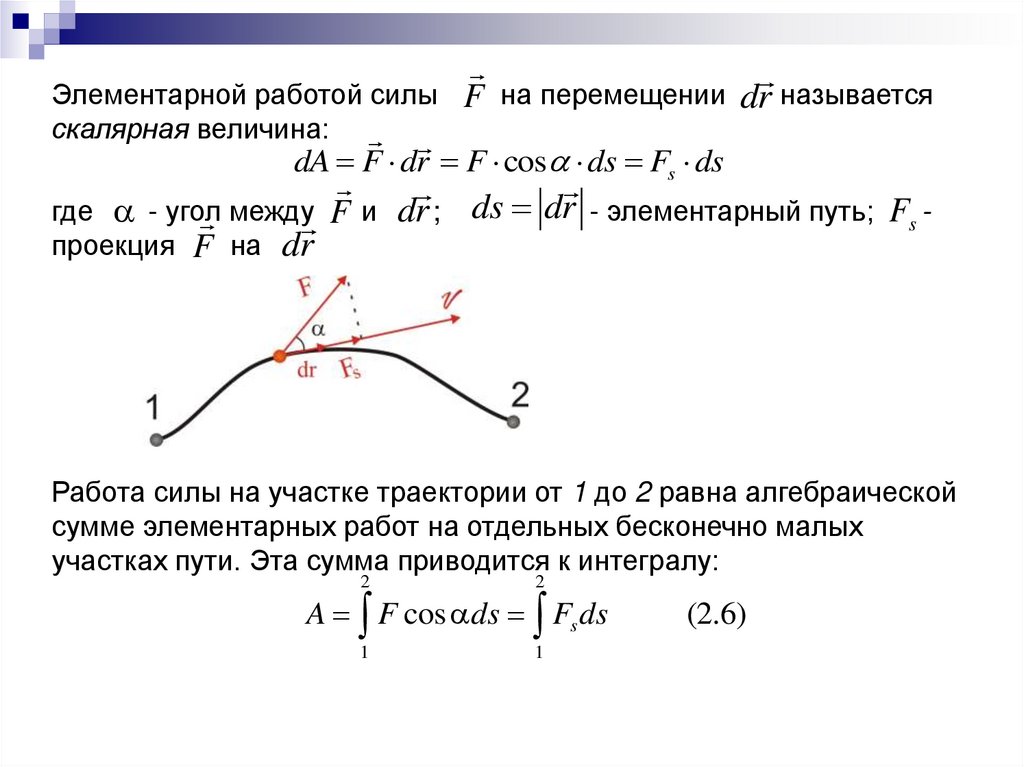
Элементарной работой силы F на перемещении dr называетсяскалярная величина:
dA F dr F cos ds Fs ds
где - угол
между F и dr ; ds dr - элементарный путь; Fs проекция F на dr
Работа силы на участке траектории от 1 до 2 равна алгебраической
сумме элементарных работ на отдельных бесконечно малых
участках пути. Эта сумма приводится к интегралу:
2
2
A F cos ds Fs ds
1
1
(2.6)
29.
Единица работы - джоуль (Дж): 1 Дж - работа, совершаемая силой в1 Н на пути в 1 м (1 Дж = 1 Н•м).
Чтобы охарактеризовать скорость совершения работы, вводят
понятие мощности:
dA
N
dt
(2.7)
Единица мощности - ватт (Вт): 1 Вт - мощность, при которой за
время 1с совершается работа в 1 Дж (1 Вт = 1 Дж/с).
30.
Кинетическая и потенциальная энергииКинетическая энергия механической системы - это энергия
механического движения этой системы.
Сила F , действуя на покоящееся тело и вызывая его движение,
совершает работу, а энергия движущегося тела возрастает на
величину затраченной
работы.
ТО, работа силы F на пути, который тело прошло за время
возрастания скорости от 0 до , идет на увеличение кинетической
энергии dA тела, т. е.
d
dA Fdr m
dr m d dEk
dt
откуда
m 2
Ek m d
2
0
31.
Потенциальная энергия — механическая энергия системы тел,определяемая их взаимным расположением и характером сил
взаимодействия между ними.
Тело, находясь в потенциальном поле сил, обладает потенциальной
энергией E П . Работа консервативных сил при элементарном
(бесконечно малом) изменении конфигурации системы равна
приращению потенциальной энергии, взятому со знаком минус, так
как работа совершается за счет убыли потенциальной энергии:
dA dE П
Работа dA выражается как скалярное произведение силы F на
перемещение dr :
Fdr dE П
Потенциальная энергия может быть определена:
E П Fdr const
32.
Потенциальная энергия системы, подобно кинетической энергии,является функцией состояния системы. Она зависит только от
конфигурации системы и ее положения по отношению к внешним
телам.
Полная механическая энергия системы — энергия
механического движения и взаимодействия:
EП EK Eполн
Закон сохранения энергии
33.
Рассмотримсистему
МТ с m1 ,m 2 ,...m n , движущихся с 1 , 2, ... n
Пусть F 1, F 2...F n - равнодействующие
внутренних
консервативных сил, a F 1, F 2...F n - равнодействующие внешних
сил, которые также будем считать консервативными. Кроме того,
будем считать, что на материальные точки действуют еще и
внешние неконсервативные силы; равнодействующие этих сил,
действующих на каждую из МТ, обозначим f1 , f 2 ,... f n
d 1
m1 dt F1 F1 f1
d 2
F2 F2 f 2
m2
dt
d n
mn dt Fn Fn f n
34.
Двигаясь под действием сил, точки системы за время dtсовершают перемещения, dr 1, dr 2 , ...dr n
m
F F dr f dr
d
1
1 1
1 1 1 1
1
dr f dr
m
d
F
F
2 2 2
2
2
2
2 2
m
F F dr f dr
d
n
n
n
n n n n
n
Сложив получим:
n
n
mi i d i Fi Fi dri f i dri
i 1
i 1
i 1
n
35.
Первое слагаемое левой части равенства есть приращениекинетической энергии системы dEk второе элементарное
приращению потенциальной энергии системы, dEп правая часть
задает работу внешних неконсервативных сил. Т.О. получаем:
d Eп Ek dA
Если внешние неконсервативные силы отсутствуют,
d Eп Ek 0
Eп Ek Eполн const
т.е. полная механическая энергия системы сохраняется постоянной.
Крайнее выражения представляет собой закон сохранения
механической энергии: в системе тел, между которыми действуют
только консервативные силы, полная механическая энергия
сохраняется, т. е. не изменяется со временем.
Закон сохранения механической энергии связан с однородностью
времени, т.е. инвариантностью физических законов относительно
выбора начала отсчета времени
36.
3. Динамика вращательного движенияМоментом инерции тела относительно оси вращения
называется физическая величина, равная сумме
произведений масс материальных точек системы на
квадраты их расстояний до рассматриваемой оси:
n
J mi ri 2
5.1
i 1
В случае непрерывного распределения mi
J r 2 dm
5.2
найдем момент инерции однородного сплошного
цилиндра высотой h и радиусом R относительно
его геометрической оси
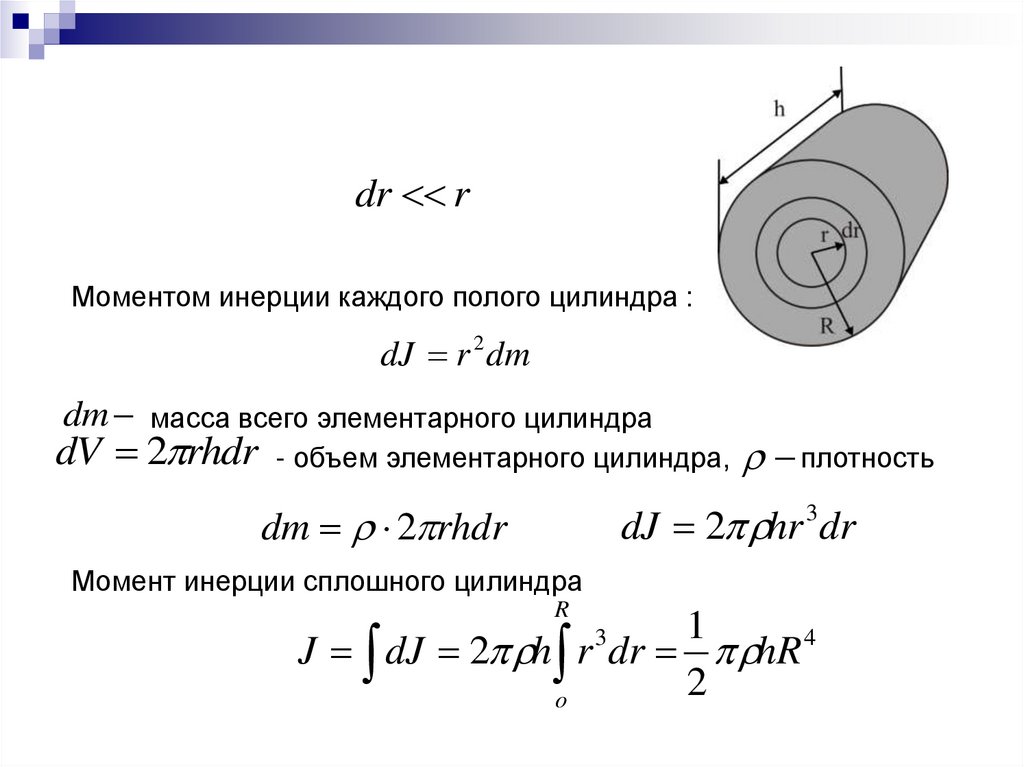
37.
dr rМоментом инерции каждого полого цилиндра :
dJ r 2 dm
dm масса всего элементарного цилиндра
dV 2 rhdr - объем элементарного цилиндра, плотность
dJ 2 hr 3dr
dm 2 rhdr
Момент инерции сплошного цилиндра
R
1
J dJ 2 h r dr hR 4
2
o
3
38.
Поскольку масса цилиндра :m R 2 h
,
можно записать момент инерции сплошного цилиндра:
1
J m R2
2
теорема
Штейнера:
момент
инерции J тела
относительно любой оси вращения равен моменту его
инерции относительно
параллельной оси, проходящей
Jc
через центр масс тела, сложенному с произведением
массы тела на квадрат
m расстояния между осями: a
J J c ma 2
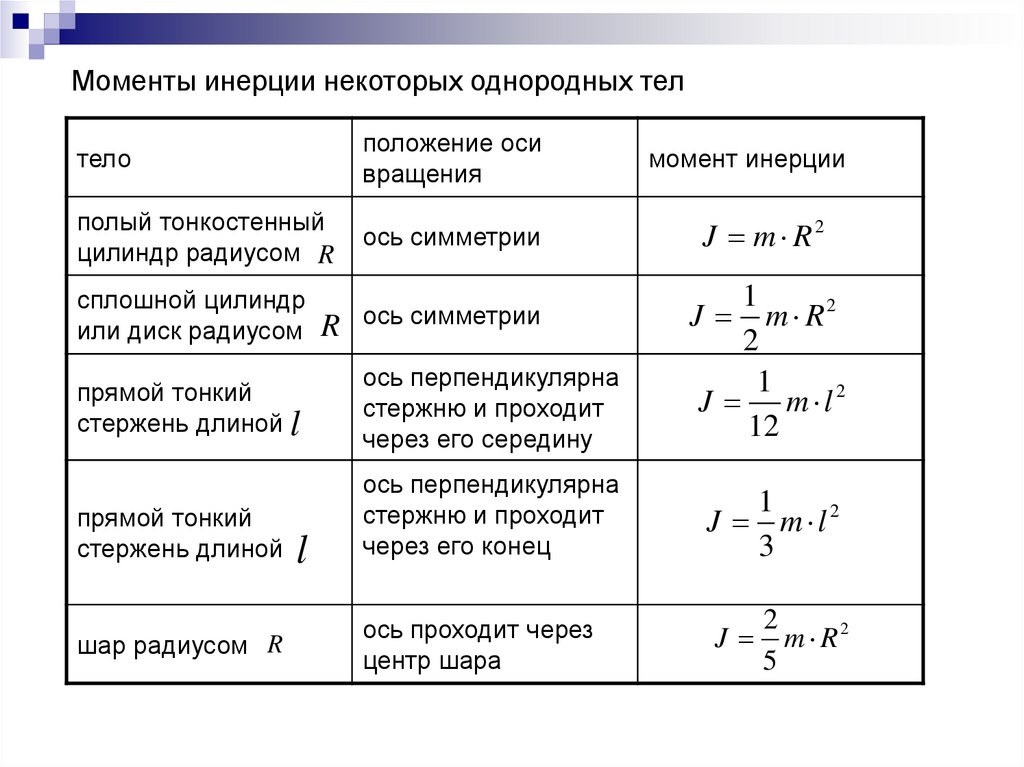
39.
Моменты инерции некоторых однородных телтело
положение оси
вращения
момент инерции
полый тонкостенный
цилиндр радиусом R
ось симметрии
J m R2
прямой тонкий
стержень длиной l
ось перпендикулярна
стержню и проходит
через его середину
1
J m R2
2
1
J m l2
12
прямой тонкий
стержень длиной l
ось перпендикулярна
стержню и проходит
через его конец
1
J m l2
3
ось проходит через
центр шара
J
сплошной цилиндр
ось симметрии
или диск радиусом R
шар радиусом R
2
m R2
5
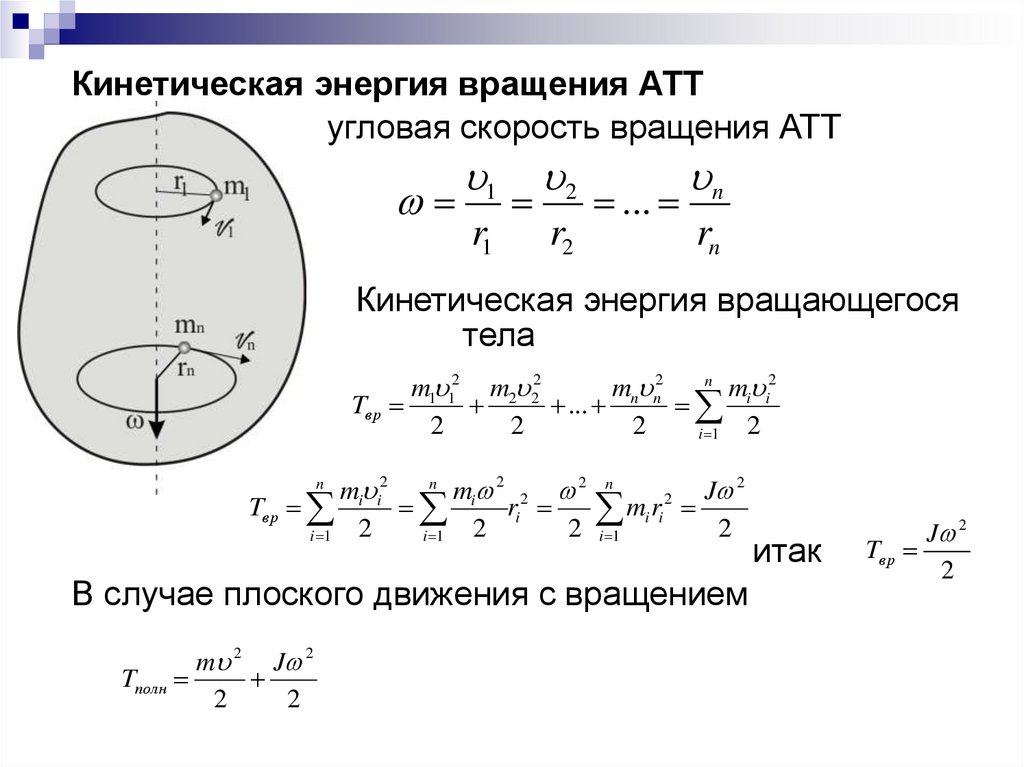
40.
Кинетическая энергия вращения АТТугловая скорость вращения АТТ
1
r1
2
r2
...
n
rn
Кинетическая энергия вращающегося
тела
n
mn n2
mi i2
m1 12 m2 22
Tвр
...
2
2
2
2
i 1
n
mi i2
mi 2 2 2 n
J 2
2
Tвр
ri
mi ri
2
2
2 i 1
2
i 1
i 1
n
В случае плоского движения с вращением
m 2 J 2
Tполн
2
2
итак
J 2
Tвр
2
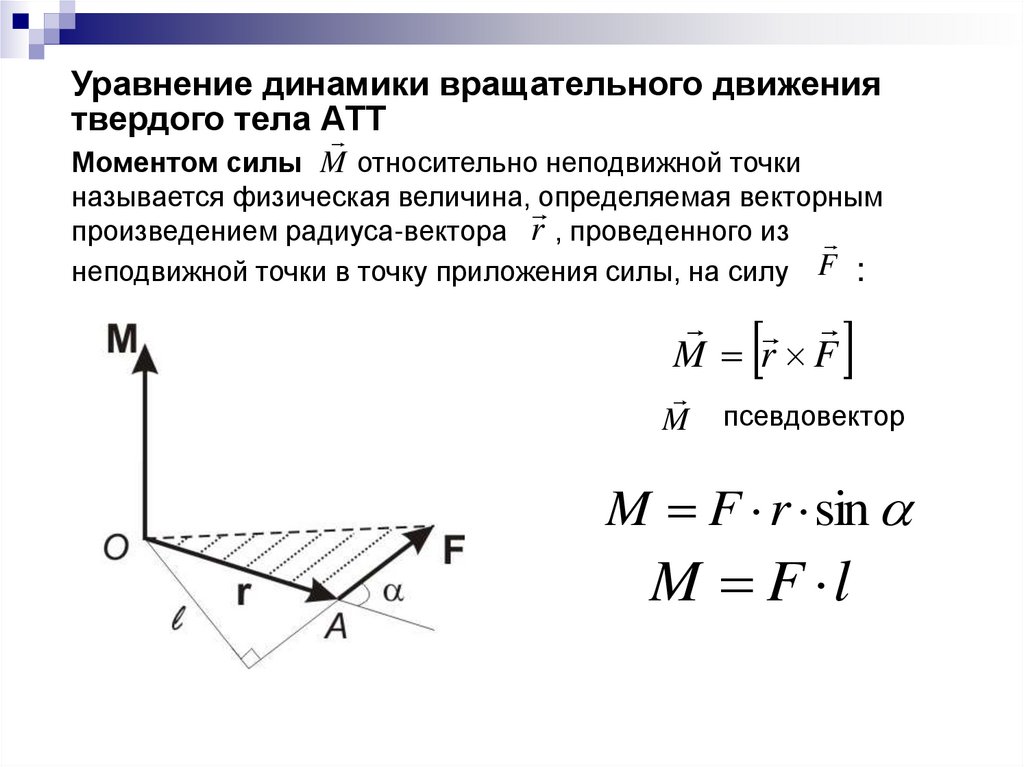
41.
Уравнение динамики вращательного движениятвердого тела АТТ
Моментом силы M относительно неподвижной точки
называется физическая величина, определяемая векторным
произведением радиуса-вектора r , проведенного из
неподвижной точки в точку приложения силы, на силу F :
M r F
M
псевдовектор
M F r sin
M F l
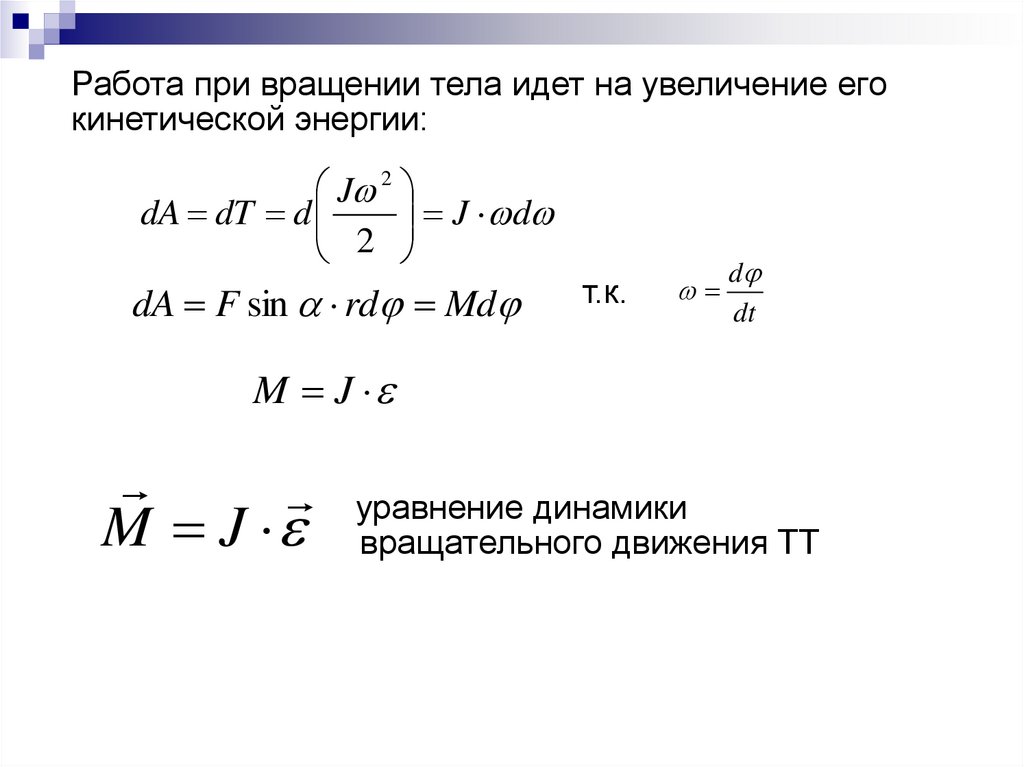
42.
Работа при вращении тела идет на увеличение егокинетической энергии:
J 2
J d
dA dT d
2
dA F sin rd Md
т.к.
d
dt
M J
M J
уравнение динамики
вращательного движения ТТ
43.
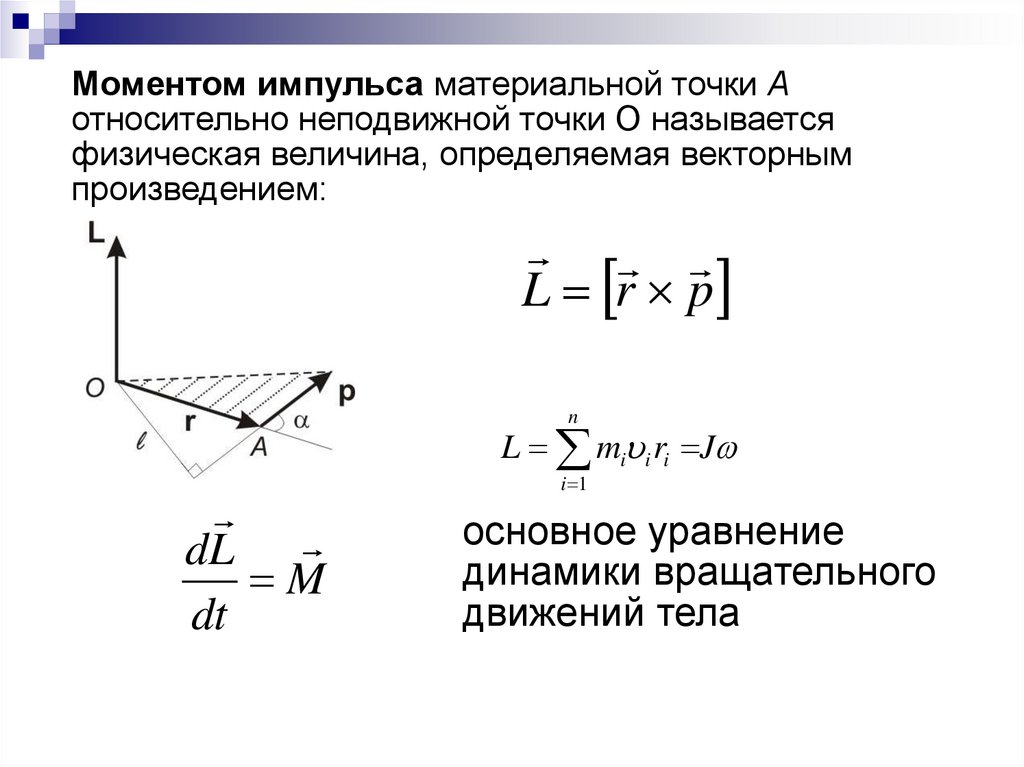
Моментом импульса материальной точки Аотносительно неподвижной точки О называется
физическая величина, определяемая векторным
произведением:
L r p
n
L mi i ri J
dL
M
dt
i 1
основное уравнение
динамики вращательного
движений тела
44.
В замкнутой системе момент внешних сил M 0и
dL
0 , откуда
dt
L const закон сохранения
момента импульса
закон сохранения момента импульса: момент
импульса замкнутой системы сохраняется, т.е. не
изменяется с течением времени.
Закон сохранения момента импульса —
фундаментальный закон природы, он связан со
свойством симметрии пространства - его
изотропностью, т.е. с инвариантностью физических
законов относительно выбора направления осей
координат системы отсчета
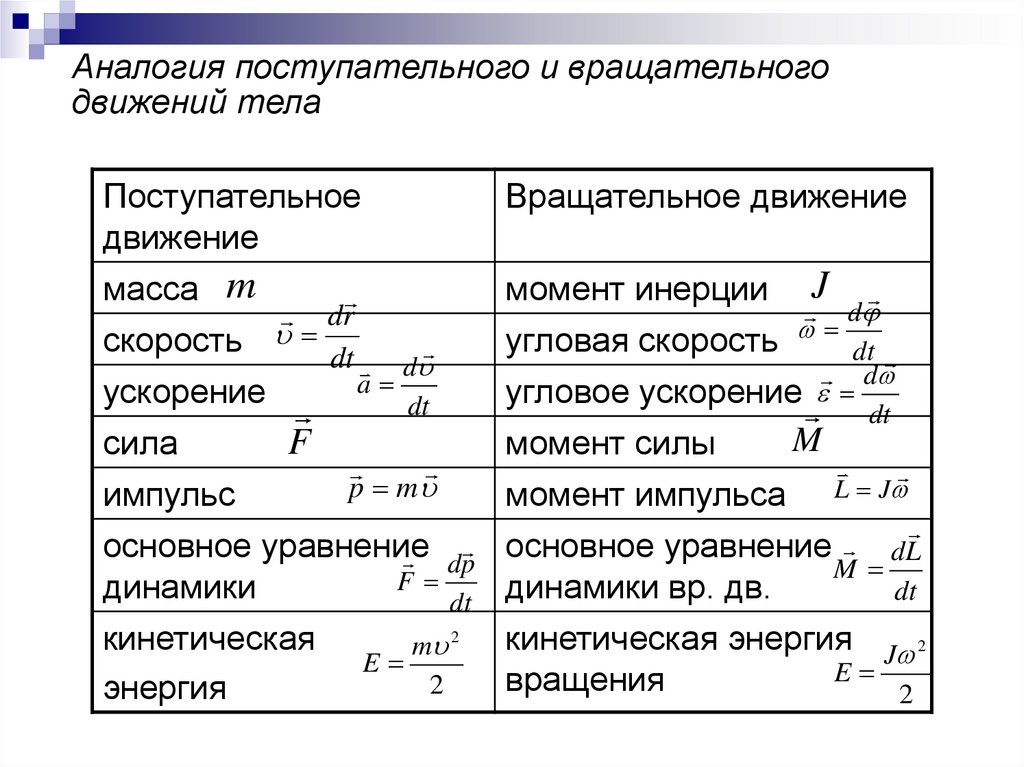
45.
Аналогия поступательного и вращательногодвижений тела
Поступательное
движение
масса m
dr
скорость
dt d
a
ускорение
dt
F
сила
p m
импульс
основное уравнение
dp
F
динамики
dt
кинетическая
m 2
E
2
энергия
Вращательное движение
момент инерции J
d
угловая скорость dt
d
угловое ускорение
dt
M
момент силы
L
J
момент импульса
основное уравнение dL
M
динамики вр. дв.
dt
кинетическая энергия J 2
E
вращения
2
46.
Основы специальной теорииотносительности (самостоятельно!)
Принцип относительности Галилея. Преобразования
Галилея.
Принцип относительности Эйнштейна.
Преобразования Лоренца.
Относительность одновременности, длины, интервала
времени. Закон сложения скоростей.
Закон сохранения энергии в СТО. Взаимосвязь массы
и энергии.
47.
4. Движение в неинерциальных системах отсчета.Птоломей, считая Землю расположенной в центре
Вселенной, предположил, что каждая из планет
движется по малому кругу, в центре которого находится
Земля. Эта концепция получила название птоломеевой
геоцентрической системы мира.
В начале XVI в. польским астрономом Н. Коперником
обоснована гелиоцентрическая система: движения
небесных тел объясняются движением Земли вокруг
Солнца и суточным вращением Земли.
48.
И. Кеплер, обработав и уточнив результатымногочисленных наблюдений Т. Браге, изложил законы
движения планет:
1. Планеты движутся по эллипсам, в одном из фокусов
которого находится Солнце.
2. Радиус-вектор планеты за равные промежутки
времени описывает одинаковые площади.
3. Квадраты периодов обращения планет вокруг
Солнца относятся как кубы больших полуосей их
орбит.
49.
Впоследствии И. Ньютон, изучая движение небесныхтел, на основании законов Кеплера закон всемирного
тяготения: между любыми двумя материальными
точками действует сила взаимного притяжения,
прямо пропорциональная произведению масс этих
точек и обратно пропорциональная квадрату
расстояния между ними
m1m2
F G 2
r
сила называется
гравитационной
Гравитационную постоянную впервые посчитал Кавендиш
2
Н
м
G 6,67 10 11
кг 2
50.
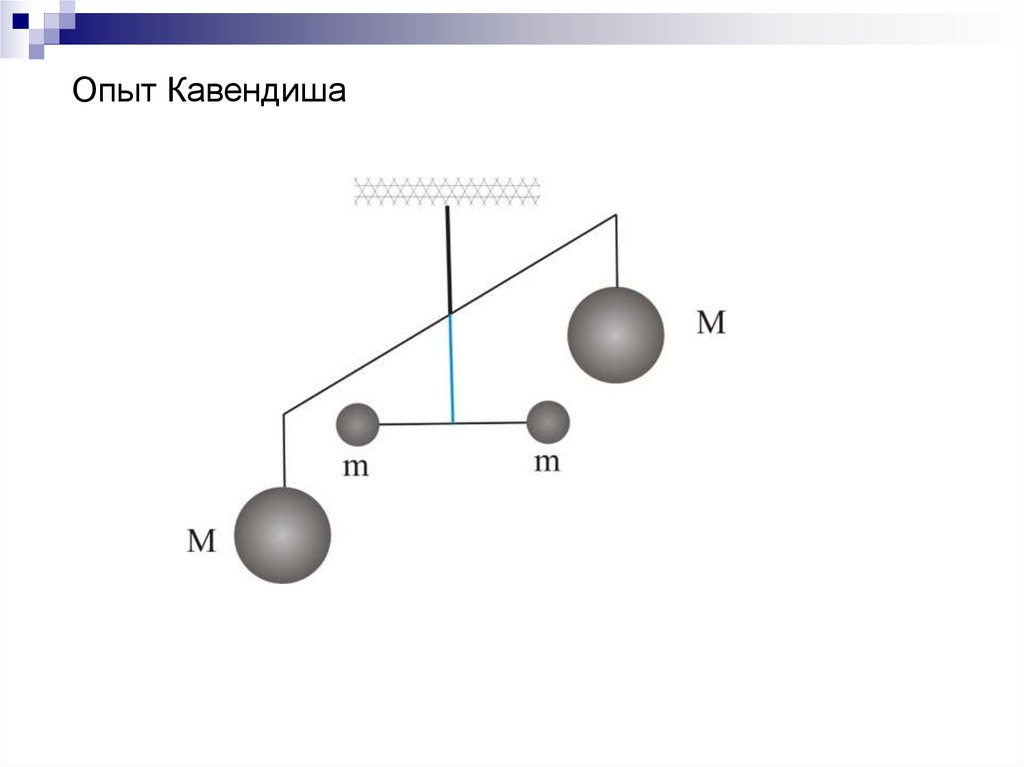
Опыт Кавендиша51.
На любое тело, расположенное вблизи Земли,действует сила тяготения F , под влиянием которой,
тело начнет двигаться с ускорением свободного
падения g .
F mg - сила тяжести
Если пренебречь суточным вращением Земли вокруг
своей оси, то сила тяжести и сила гравитационного
тяготения равны между собой:
mM
mg G 2
R
M - масса Земли
R - расстояние между телом и центром Земли
52.
если тело расположено на высоте h от поверхностиЗемли, тогда
mM
P G
R h 2
т. е. сила тяжести с удалением от поверхности Земли
уменьшается.
Весом тела называют силу, с которой тело вследствие
тяготения к Земле действует на опору (или подвес),
удерживающую тело от свободного падения.
Вес тела проявляется только в том случае, если тело
движется с ускорением, отличным от , т. е. когда на
g силы.
тело кроме силы тяжести действуют другие
53.
Если тело движется в поле тяготения Земли сускорением a g , то к этому телу приложена
дополнительная сила N , удовлетворяющая условию
N P ma
тогда вес тела
N P ma m g a
т. е. если тело покоится или движется прямолинейно и
равномерно, то a 0 и P mg. Если тело свободно
движется в поле тяготения по любой траектории и в
любом направлении, то a g и P 0 , т. е. тело
будет невесомым.
54.
Поле тяготения. Напряженность полятяготения.
Тяготение принадлежит к особой группе
взаимодействий. Силы тяготения не зависят
от того, в какой среде взаимодействующие
тела находятся.
Гравитационное взаимодействие между
телами осуществляется с помощью
гравитационного поля. Это поле
порождается телами и является формой
существования материи. На всякое тело
массой m , внесенное
поле, действует
в это
сила тяготения, т. е. F mg
55.
g не зависит от m и называетсянапряженностью поля тяготения.
Напряженность поля тяготения
определяется силой, действующей со стороны
поля на МТ единичной массы, и совпадает по
направлению с действующей силой.
Напряженность есть силовая характеристика
поля тяготения.
Если напряженность поля во всех точках
одинакова, то такое поле называется
однородным
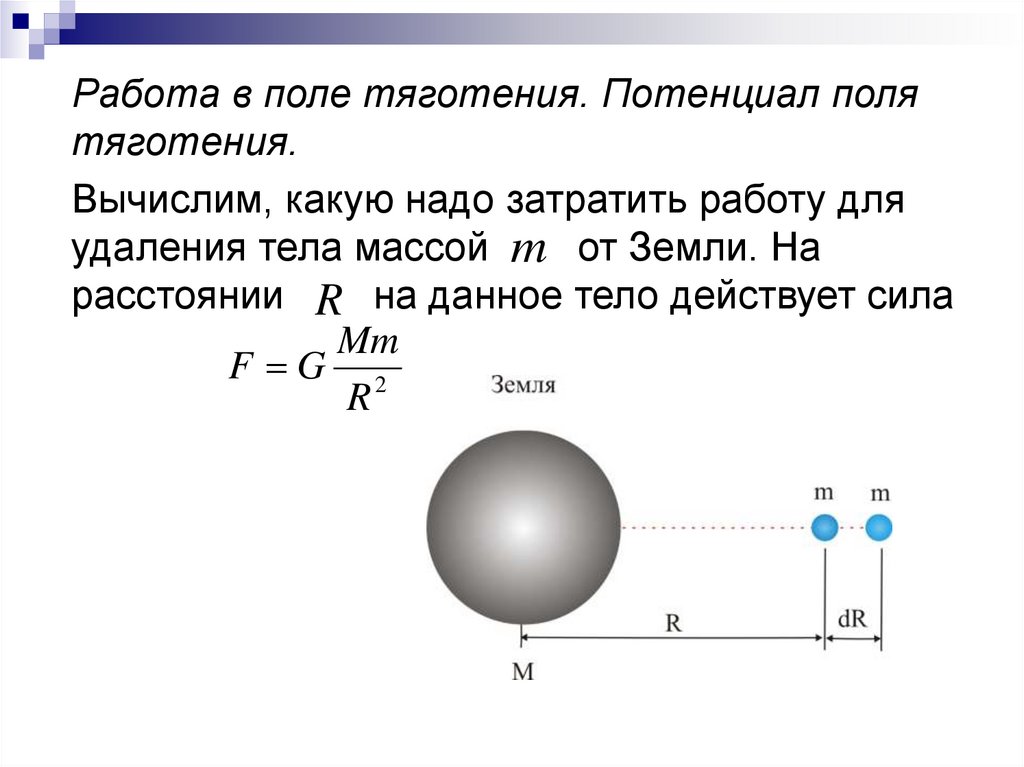
56.
Работа в поле тяготения. Потенциал полятяготения.
Вычислим, какую надо затратить работу для
удаления тела массой m от Земли. На
расстоянии R на данное тело действует сила
Mm
F G 2
R
57.
При перемещении этого тела на расст. dRзатрачивается работа
Mm
dA G 2 dR
R
Если тело перемещать с R1 до R2 , то
M
Mm
M
A dA G 2 dR m G
G
R
R1
R2
R1
R1
R2
R2
4.1
58.
Из (4.1) что затраченная работа в полетяготения не зависит от траектории
перемещения, а определяется лишь
начальным и конечным положениями тела, т.е.
поле действия является потенциальным
Работа, совершаемая консервативными
силами, равна изменению потенциальной
энергии системы( со знаком «-»)
A П П2 П1 П1 П2
M
M
П1 П2 m G G
R1
R2
59.
для удобства принимают при R2П2 0
mM
Тогда
П1 G
R1
mM
П G
R
П
m
Величину
являющуюся энергетической характеристикой
поля тяготения, называют потенциалом.
60.
Потенциал поля тяготения - скалярнаявеличина, определяемая потенциальной
энергией тела единичной массы в данной
точке поля или работой по перемещению
единичной массы, из данной точки поля в
M
G
(4.2)
R
R - расстояние от этого тела до
рассматриваемой точки.
Геометрич. место точек с одинаковым
потенциалом образует сферическую
поверхность. Такие поверхности, называются
эквипотенциальными.
61.
7. Элементы СТОА. Эйнштейн заложил основы СТО (другое название –
релятивистская теория) в этой теории, как и в классической
ньютоновской механике, предполагается, что время однородно, а
пространство однородно и изотропно.
В основе СТО постулаты Эйнштейна, сформулированные в 1905 г.
I. Принцип относительности: никакие опыты (механические,
электрические, оптические), проведенные внутри данной ИСО, не
дают возможности обнаружить, покоится ли эта система или
движется равномерно и прямолинейно; все законы природы
инвариантны по отношению к переходу от одной ИСО к другой.
II. Принцип инвариантности скорости света: скорость света в
вакууме не зависит от скорости движения источника света или
наблюдателя и одинакова во всех ИСО.
62.
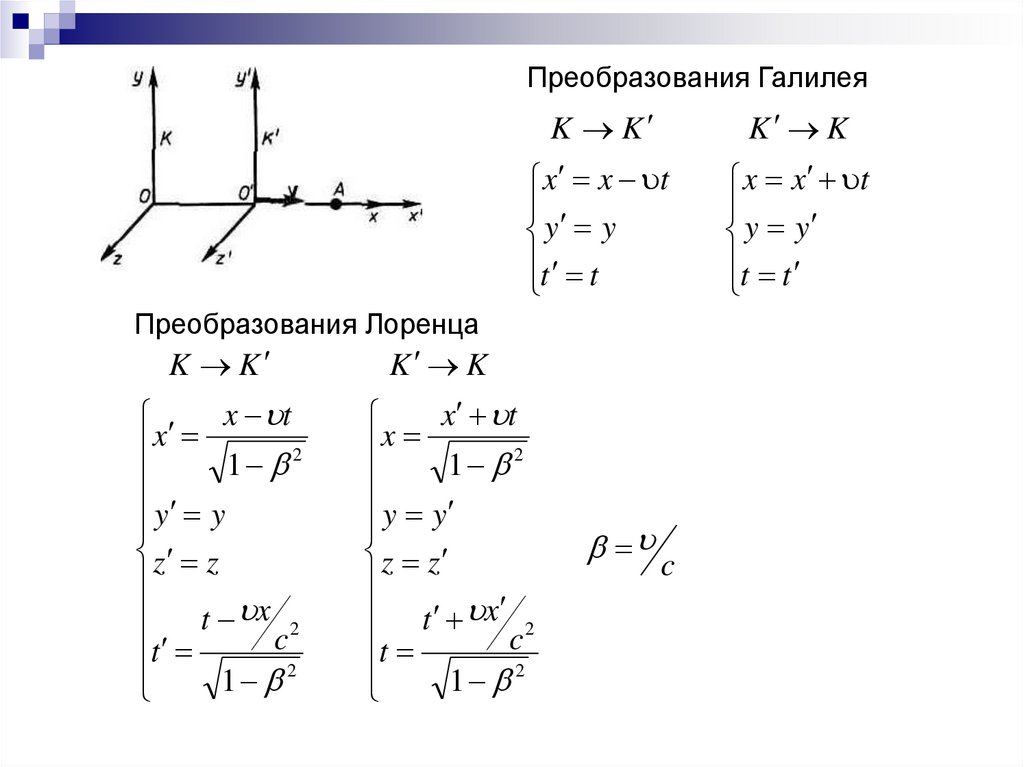
Преобразования ГалилеяK K
K K
x x t
y y
t t
x x t
y y
t t
Преобразования Лоренца
K K
K K
x t
x
2
1
y y
z z
t x 2
c
t
1 2
x t
x
2
1
y y
z z
t x 2
c
t
1 2
c
63.
Следствия из преобразований Лоренца:1.Одновременность событий в разных системах отсчета.
Пусть в K в точках с x1 и x2 в моменты t1 и t 2 происходят 2
события. В системе K им соответствуют x1 и x2 и моменты
времени t и t .
2
1
Если события в системе K происходят в одной точке x1 x2 и
являются одновременными t1 t2 , то, согласно преобразованиям
Лоренца
x1 x2 , t1 t2
т. е. эти события являются одновременными и пространственно
совпадающими для любой ИСО.
64.
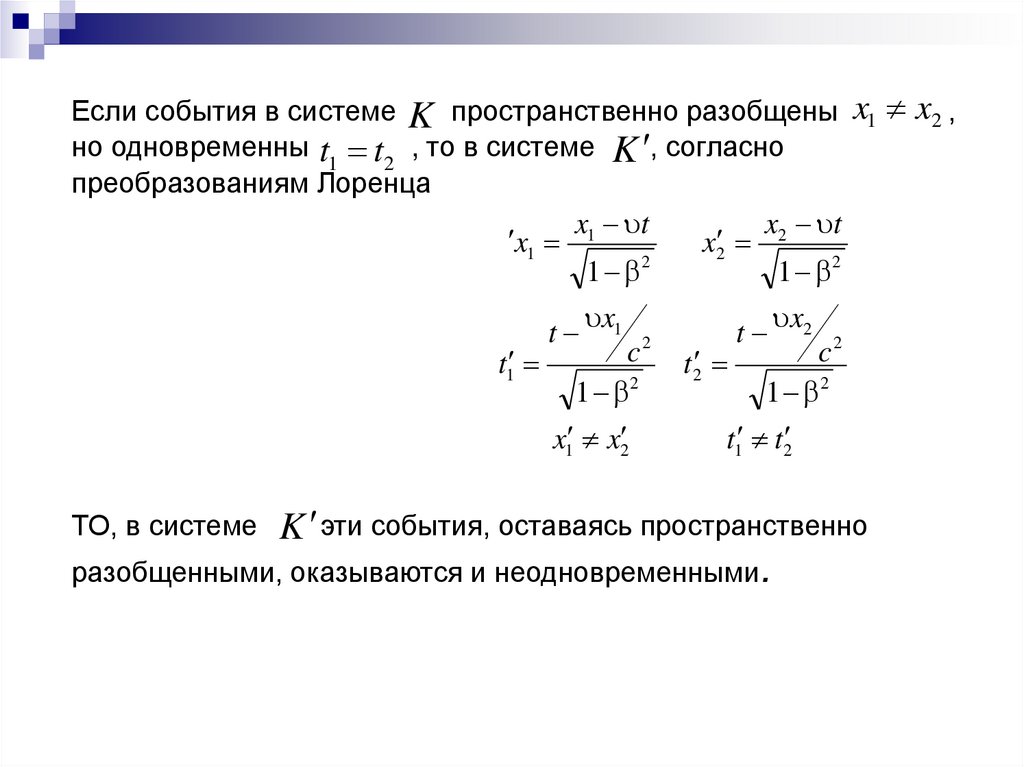
Если события в системе K пространственно разобщены x1 x2 ,но одновременны t1 t2 , то в системе K , согласно
преобразованиям Лоренца
x t
x t
x1 1
x2 2
1 2
1 2
t x1 2
c
t1
1 2
x1 x2
t x 2
2
c
t 2
1 2
t1 t 2
K эти события, оставаясь пространственно
разобщенными, оказываются и неодновременными.
ТО, в системе
65.
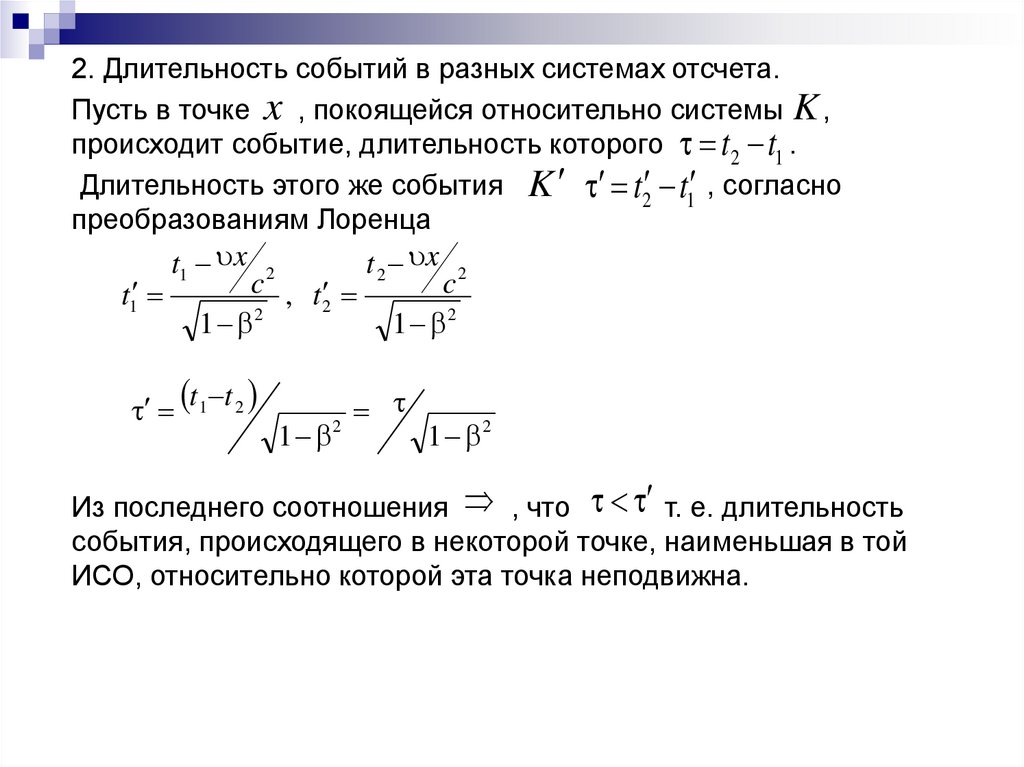
2. Длительность событий в разных системах отсчета.Пусть в точке x , покоящейся относительно системы K ,
происходит событие, длительность которого t2 t1 .
Длительность этого же события K t2 t1 , согласно
преобразованиям Лоренца
t1 x 2
t 2 x 2
c , t
c
t1
2
1 2
1 2
t t
1 2
1
2
1 2
Из последнего соотношения , что т. е. длительность
события, происходящего в некоторой точке, наименьшая в той
ИСО, относительно которой эта точка неподвижна.
66.
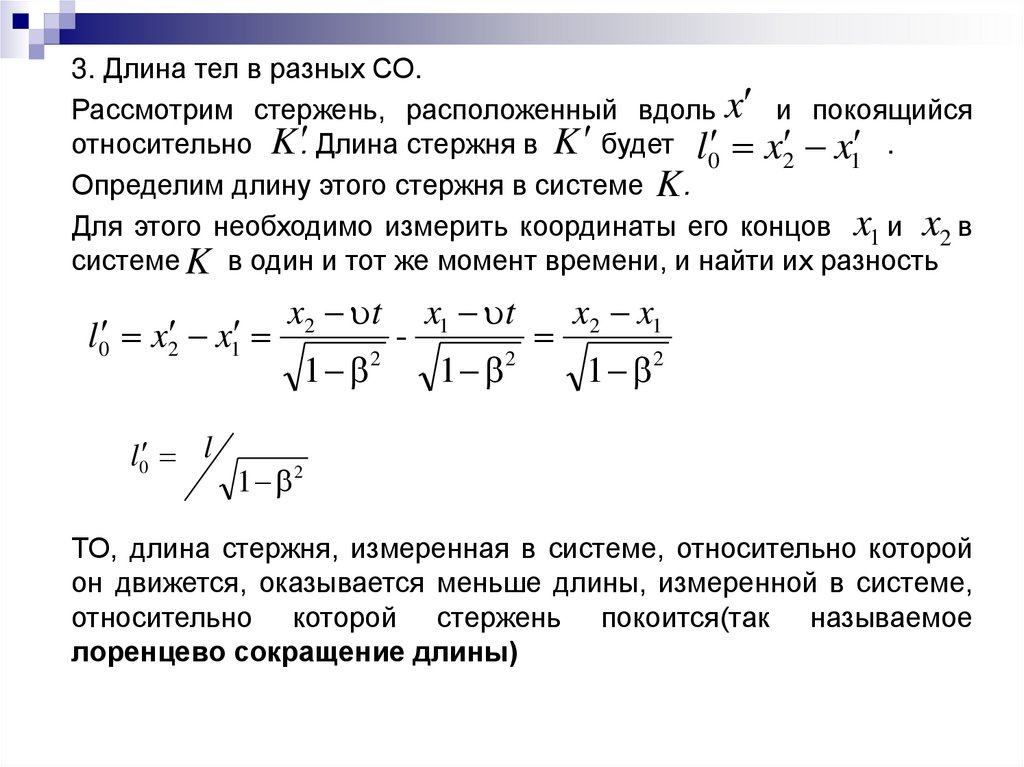
3. Длина тел в разных СО.Рассмотрим стержень, расположенный вдоль x и покоящийся
относительно K . Длина стержня в K будет l0 x2 x1 .
Определим длину этого стержня в системе K.
Для этого необходимо измерить координаты его концов x1 и x2 в
системе K в один и тот же момент времени, и найти их разность
l0 x2 x1
l0 l
x2 t
1
2
-
x1 t
1
2
x2 x1
1 2
1 2
ТО, длина стержня, измеренная в системе, относительно которой
он движется, оказывается меньше длины, измеренной в системе,
относительно которой стержень покоится(так называемое
лоренцево сокращение длины)
67.
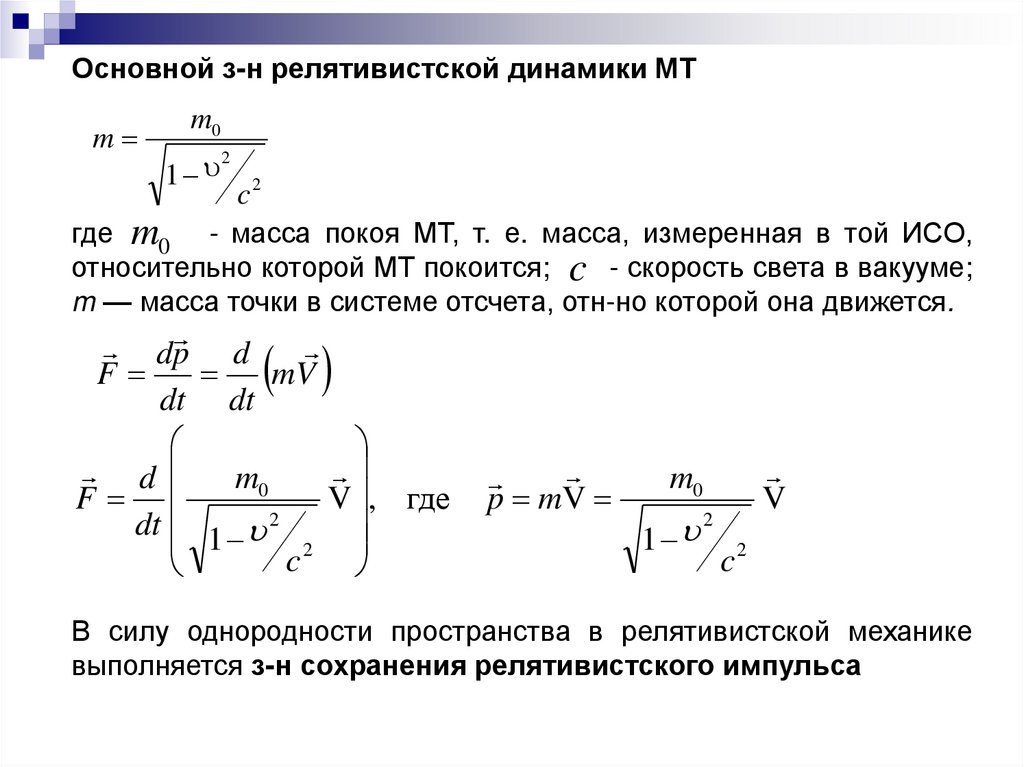
Основной з-н релятивистской динамики МТm
m0
2
1
c2
где m0 - масса покоя МТ, т. е. масса, измеренная в той ИСО,
относительно которой МТ покоится; c - скорость света в вакууме;
m — масса точки в системе отсчета, отн-но которой она движется.
dp d
F
mV
dt dt
d
m0
F
V , где
2
dt 1
2
c
p mV
m0
2
1
2
V
c
В силу однородности пространства в релятивистской механике
выполняется з-н сохранения релятивистского импульса
68.
Закон взаимосвязи массы и энергииА. Эйнштейн пришел к универсальной зависимости между
полной энергией тела E и его массой m :
E mc2
m0c 2
2
1
c2
Уравнение выражает фундаментальный закон природы - закон
пропорциональности массы и энергии: полная энергия системы
равна произведению ее массы на квадрат скорости света в
вакууме( в полную энергию Е не входит потенциальная энергия
тела во внешнем силовом поле). E m c 2 T
0
T - кинетическая энергия
2
Покоящееся тело обладает энергией E0 m0 c называемой
энергией покоя.
69.
В силу однородности времени в релятивистской механике, как и вклассической, выполняется закон сохранения энергии
Релятивистское соотношение между полной энергией и импульсом
частицы:
E m0 c 4 p 2c 2
2
Закон
пропорциональности
массы
и
энергии
блестяще
подтвержден экспериментом о выделении энергии при протекании
ядерных реакций. Он широко используется для расчета
энергетических эффектов при ядерных реакциях и превращениях
элементарных частиц.
70.
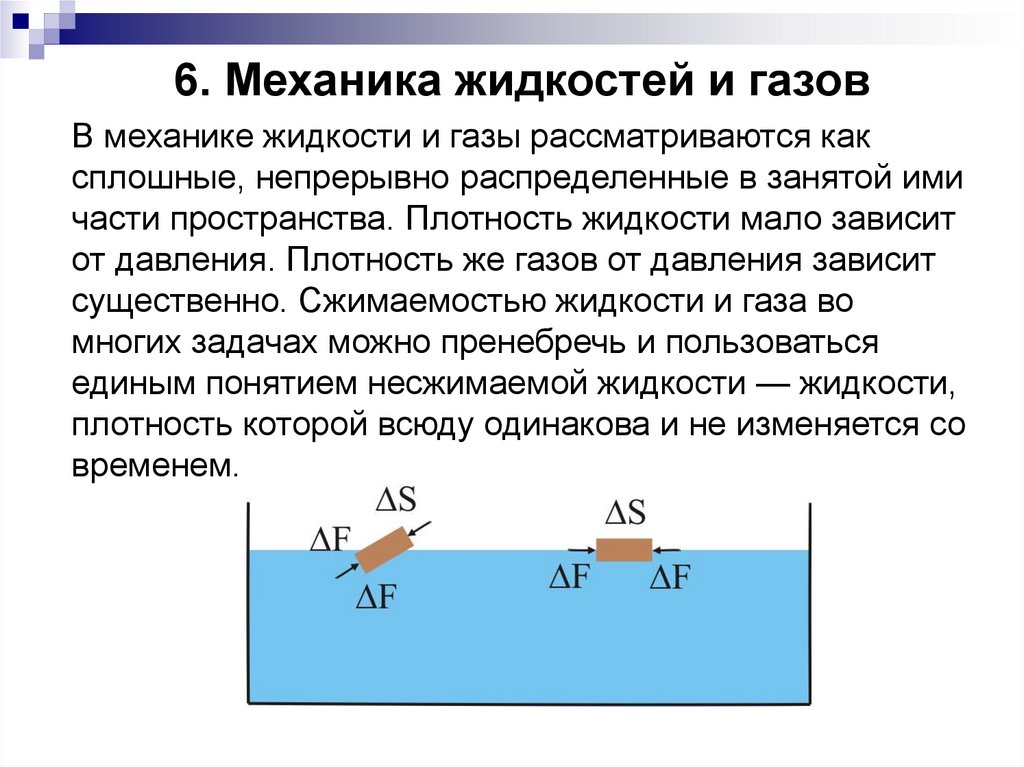
6. Механика жидкостей и газовВ механике жидкости и газы рассматриваются как
сплошные, непрерывно распределенные в занятой ими
части пространства. Плотность жидкости мало зависит
от давления. Плотность же газов от давления зависит
существенно. Сжимаемостью жидкости и газа во
многих задачах можно пренебречь и пользоваться
единым понятием несжимаемой жидкости — жидкости,
плотность которой всюду одинакова и не изменяется со
временем.
71.
Физическая величина, определяемая нормальнойсилой, действующей со стороны жидкости на единицу
площади, называется давлением p жидкости:
p F
S
p Па
Давление при равновесии жидкостей (газов)
подчиняется закону Паскаля: давление в любом месте
покоящейся жидкости одинаково по всем
направлениям, причем давление одинаково передается
по всему объему, занятому покоящейся жидкостью.
72.
Рассмотрим, как влияет вес жидкости нараспределение давления внутри покоящейся
несжимаемой жидкости.
При равновесии жидкости давление по горизонтали
всегда одинаково. Поэтому свободная поверхность
покоящейся жидкости всегда горизонтальна вдали от
стенок сосуда. Если жидкость несжимаема, то ее
плотность не зависит от давления.
P ρgSh
p
ρgh
S
S
73.
Сила давления на нижние слои жидкости будетбольше, чем на верхние, поэтому на тело, погруженное
в жидкость, действует выталкивающая сила,
определяемая законом Архимеда: на тело,
погруженное в жидкость (газ), действует со стороны
этой жидкости направленная вверх выталкивающая
сила, равная весу вытесненной телом жидкости (газа):
FA gV
- плотность жидкости
V - объем тела погруженного в жидкость
74.
Уравнение неразрывностиГрафически движение жидкостей изображается
с помощью линий тока, которые проводятся
так, что касательные к ним совпадают по
направлению с вектором скорости жидкости в
соответствующих точках пространства.
75.
Рассмотрим какую-либо трубку тока76.
tЗа t через сечение S проходит объем жидкости , Sза
S 1, где
-1
S1
1с через
пройдет
объем жидкости
1
скорость течения жидкости в месте сечения S 1
Через сечение S 2 за 1 с пройдет объем жидкости S 2 2
2 - скорость течения жидкости в месте сечения S 2 .
S1 1 S2 2 const
(6.1)
Соотношение (6.1) называется уравнением
неразрывности для несжимаемой жидкости.
77.
Уравнение БернуллиS1 1 S2 2 const
78.
Согласно закону сохранения энергии, изменениеполной энергии идеальной несжимаемой жидкости
должно быть равно работе внешних сил по
перемещению массы от жидкости:
E1 E2 A
(6.2)
где E1 и E2- полные энергии жидкости массой m в
местах S и S .
1
2
С другой стороны, A — это работа, совершаемая при
перемещении всей жидкости, заключенной между
сечениями S и S , за рассматриваемый малый
2
1
промежуток времени t .
79.
Для перенесения массы m от S до S1 жидкость1
должна переместиться на расстояние l t
и от S 2 до S - на расстояние
2
A F1 l1 F2 l2
F1 p1S1
Полные энергии:
1
l2 2 t .
1
(6.3)
F2 p2 S2
m
E1
mgh1
2
m2 22
E2
mgh2
2
2
1 1
(6.4)
(6.5)
80.
Подставляя (6.4) и (6.5) в (6.2) и приравнивая (6.2) и(6.3), получим:
m
m
mgh1 p1S1 1 t
mgh2 p2 S 2 2 t
2
2
2
1
2
2
Согласно уравнению неразрывности для несжимаемой
жидкости (6.1), объем, занимаемый жидкостью,
остается постоянным, т. е.:
V S1 1 t S2 2 t
Разделим на V получим:
2
2
1
2
gh1 p1
gh2 p2
2
- плотность жидкости
2
81.
Сечения выбирались произвольно:2
2
gh p const
( 6.6)
Выражение (6.6) выведено швейцарским физиком
Бернулли и называется уравнением Бернулли.
Уравнение Бернулли — выражение закона сохранения
энергии применительно к установившемуся течению
идеальной жидкости.
p
статическое давление
2
динамическое давление
2
gh гидростатическое давление