
 к изображению на входе звена (системы)")




 к изображению на входе звена (системы)")


 mathematics
mathematicsSimilar presentations:




")





Основные характеристики звеньев и систем. Передаточная функция
1. Теория автоматического управления
Основные характеристики звеньеви систем.
Передаточная функция
1
2.
Передаточная функцияХарактеризует
изменение сигнала при его прохождении
через звено (систему)
2
3. Определение отношение изображения сигнала на выходе звена (системы) к изображению на входе звена (системы)
Передаточная функцияОпределение
отношение изображения сигнала на выходе
звена (системы) к изображению на входе
звена (системы)
3
4. Изображение Преобразование Лапласа – интегральное преобразование
Преобразование ЛапласаИзображение
Преобразование Лапласа – интегральное
преобразование
X ( p) L( x(t )) x(t )e
pt
dt
0
где
p= σ + wi
переменная преобразования Лапласа
4
5.
Преобразование ЛапласаСвойства преобразования Лапласа
5
6.
Преобразование ЛапласаСвойства преобразования Лапласа
6
7.
Преобразование ЛапласаСвойства преобразования Лапласа
7
8.
Преобразование ЛапласаСвойства преобразования Лапласа
8
9. Определение отношение изображения сигнала на выходе звена (системы) к изображению на входе звена (системы)
Передаточная функцияОпределение
отношение изображения сигнала на выходе
звена (системы) к изображению на входе
звена (системы)
Y ( p)
W ( p)
X ( p)
9
10.
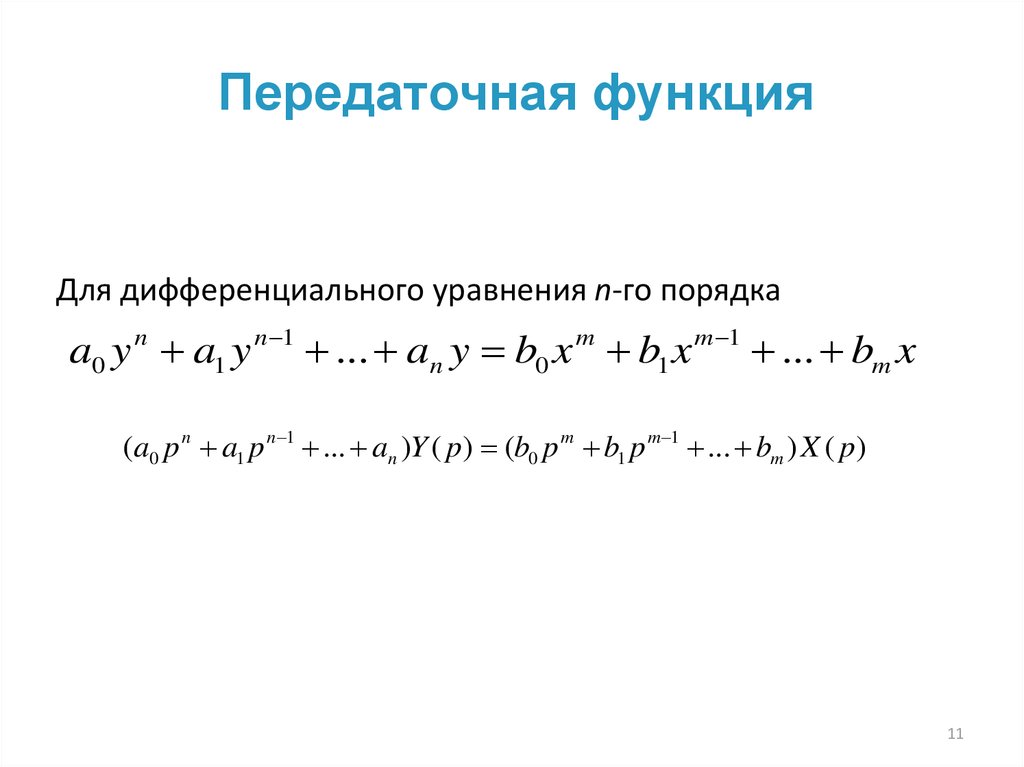
Передаточная функцияДля дифференциального уравнения n-го порядка
a0 y n a1 y n 1 ... an y b0 x m b1 x m 1 ... bm x
10
11.
Передаточная функцияДля дифференциального уравнения n-го порядка
a0 y n a1 y n 1 ... an y b0 x m b1 x m 1 ... bm x
(a0 p n a1 p n 1 ... an )Y ( p) (b0 p m b1 p m 1 ... bm ) X ( p)
11
12.
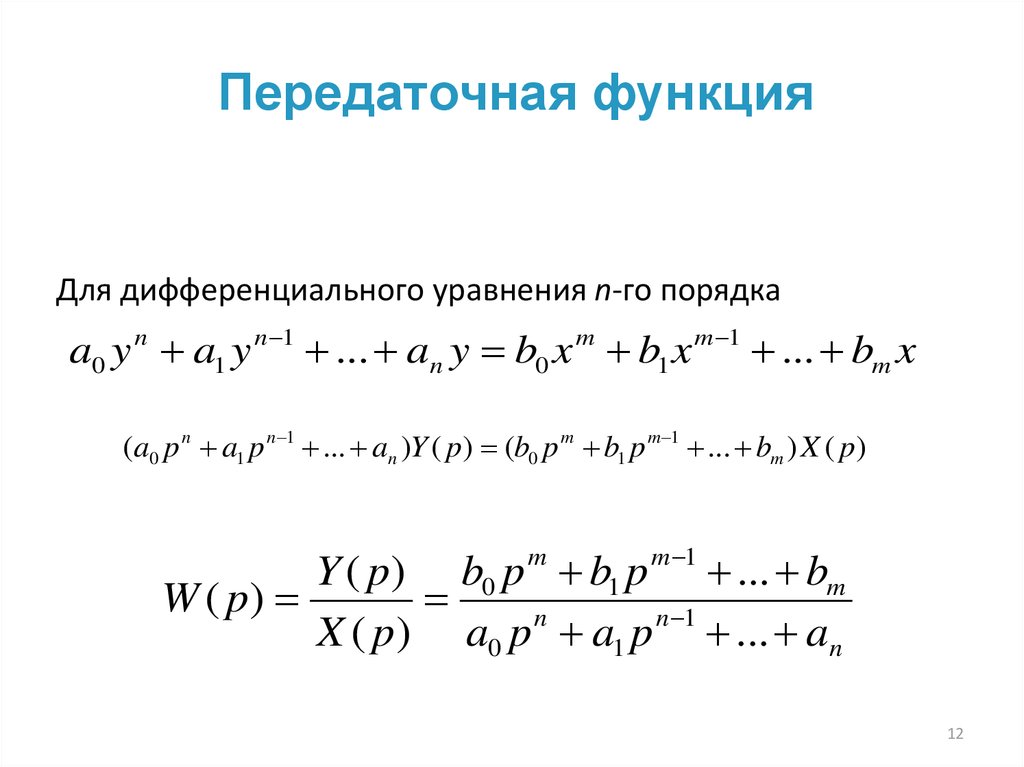
Передаточная функцияДля дифференциального уравнения n-го порядка
a0 y n a1 y n 1 ... an y b0 x m b1 x m 1 ... bm x
(a0 p n a1 p n 1 ... an )Y ( p) (b0 p m b1 p m 1 ... bm ) X ( p)
Y ( p) b0 p m b1 p m 1 ... bm
W ( p)
n
n 1
X ( p) a0 p a1 p ... an
12
13.
Передаточная функцияY ( p) b0 p m b1 p m 1 ... bm
W ( p)
n
n 1
X ( p) a0 p a1 p ... an
Знаменатель передаточной функции задает
характеристическое уравнение
a0 p n a1 p n 1 ... an 0
13
14.
Передаточная функцияY ( p) b0 p m b1 p m 1 ... bm
W ( p)
n
n 1
X ( p) a0 p a1 p ... an
Знаменатель передаточной функции задает
характеристическое уравнение
a0 p n a1 p n 1 ... an 0
Корни знаменателя передаточной функции – полюса системы
14
15.
Передаточная функцияY ( p) b0 p m b1 p m 1 ... bm
W ( p)
n
n 1
X ( p) a0 p a1 p ... an
Знаменатель передаточной функции задает
характеристическое уравнение
a0 p n a1 p n 1 ... an 0
Корни знаменателя передаточной функции – полюса системы
Корни числителя передаточной функции – нули системы
15