



 physics
physicsSimilar presentations:



")
")





Шарнирные, статически определимые балки
1.
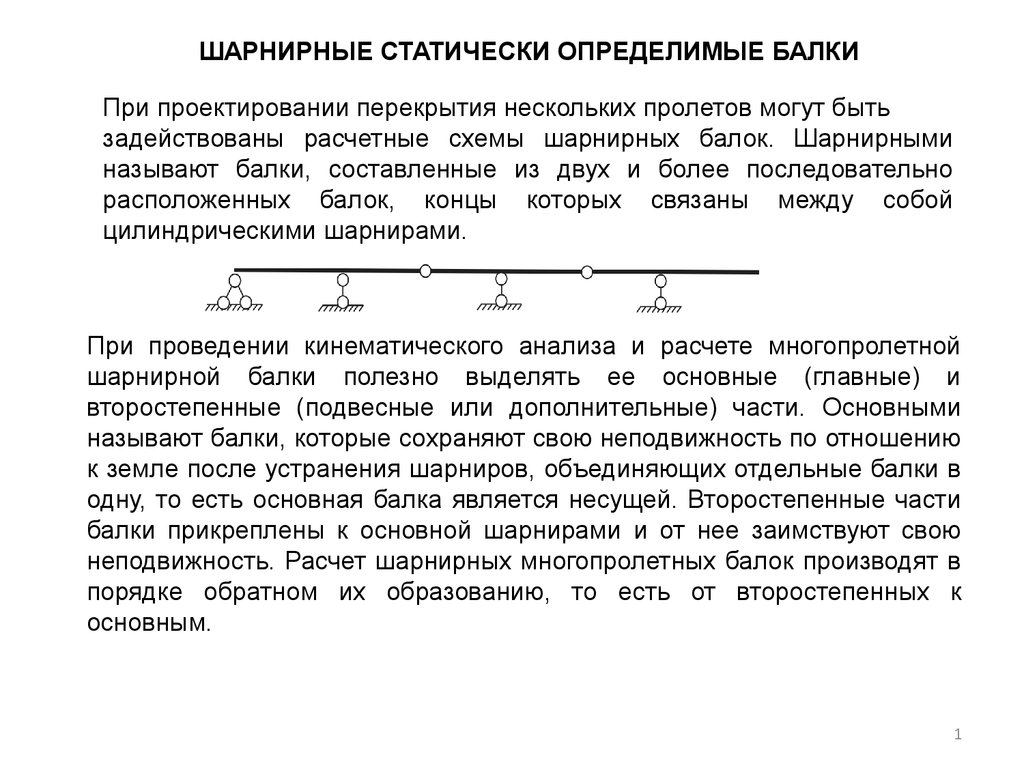
ШАРНИРНЫЕ СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ БАЛКИПри проектировании перекрытия нескольких пролетов могут быть
задействованы расчетные схемы шарнирных балок. Шарнирными
называют балки, составленные из двух и более последовательно
расположенных балок, концы которых связаны между собой
цилиндрическими шарнирами.
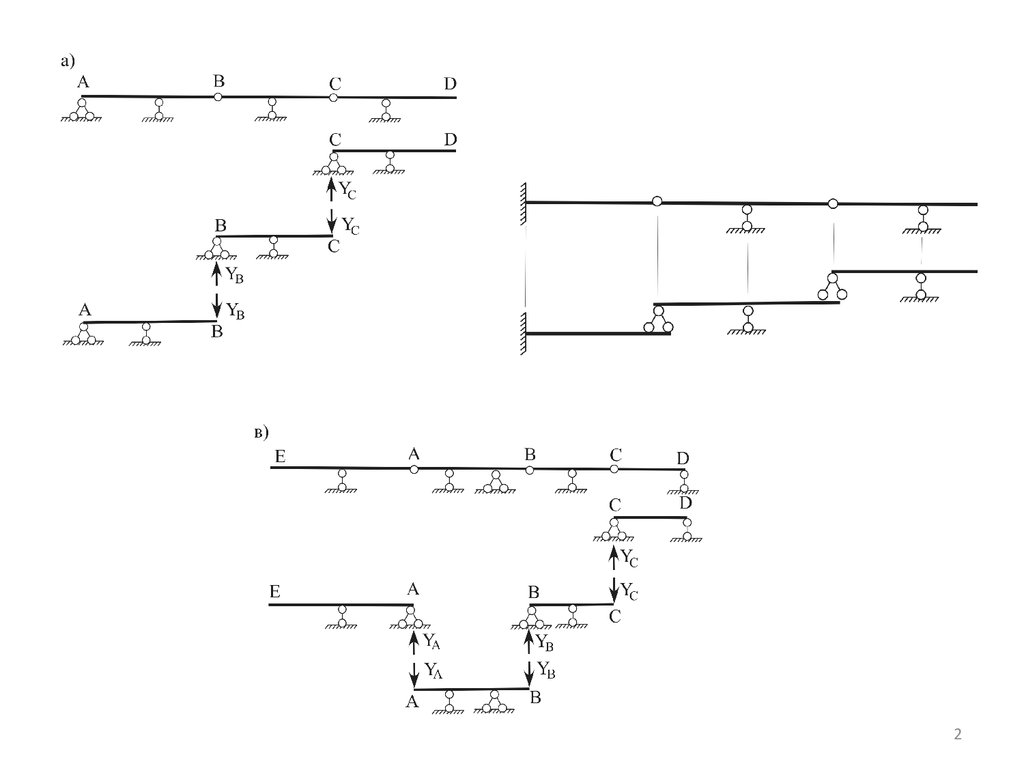
При проведении кинематического анализа и расчете многопролетной
шарнирной балки полезно выделять ее основные (главные) и
второстепенные (подвесные или дополнительные) части. Основными
называют балки, которые сохраняют свою неподвижность по отношению
к земле после устранения шарниров, объединяющих отдельные балки в
одну, то есть основная балка является несущей. Второстепенные части
балки прикреплены к основной шарнирами и от нее заимствуют свою
неподвижность. Расчет шарнирных многопролетных балок производят в
порядке обратном их образованию, то есть от второстепенных к
основным.
1
2.
23.
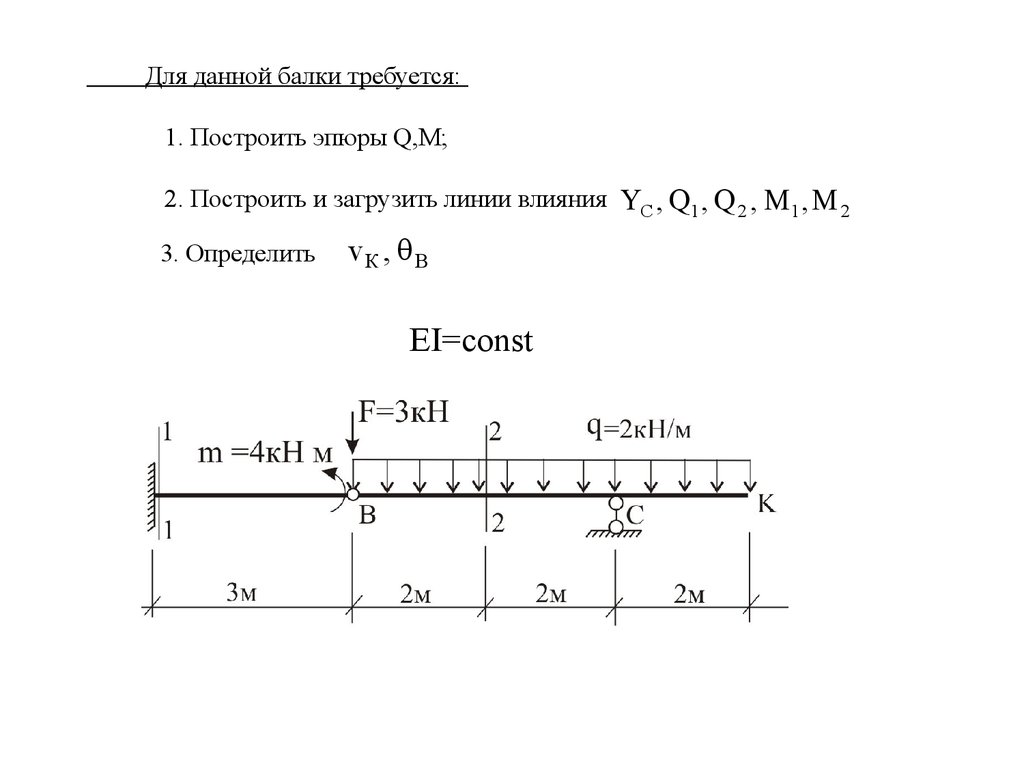
Для данной балки требуется:1. Построить эпюры Q,M;
2. Построить и загрузить линии влияния YC , Q1 , Q 2 , M1 , M 2
3. Определить
v К , B
EI=const
4.
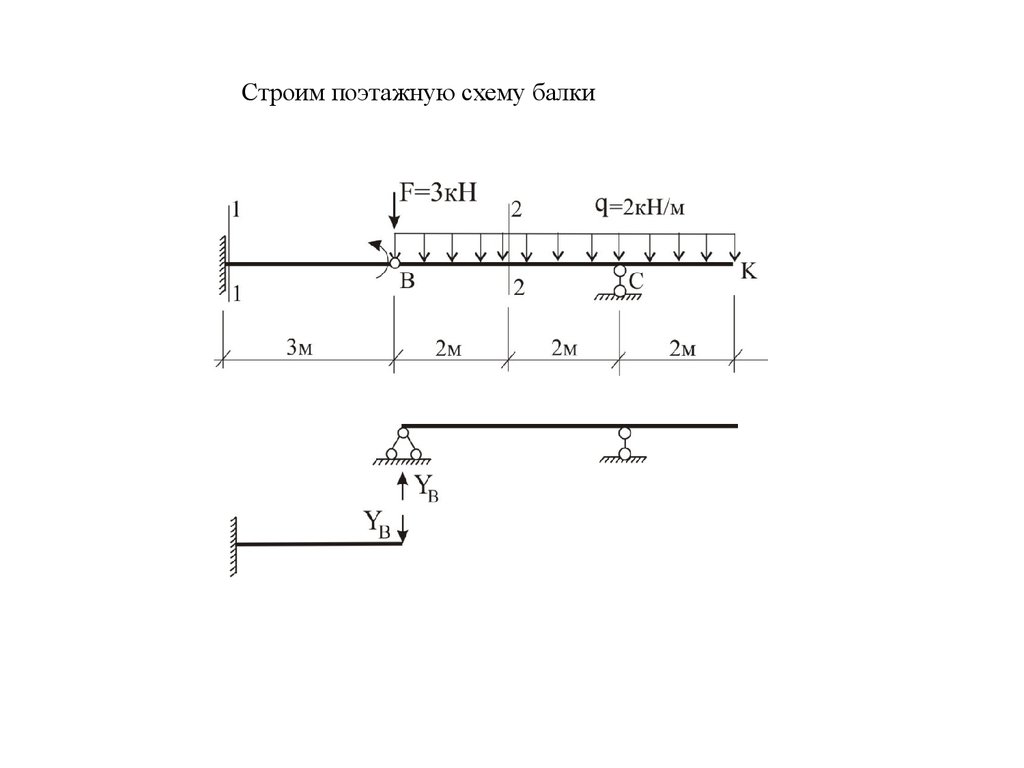
Строим поэтажную схему балки5.
1. Построение эпюр Q, M6.
Если X величина какого-либо усилия (N, Q, M) или перемещения вопределенном месте сооружения, то линией влияния X называют
график ее зависимости от «x» – координаты местоположения
движущейся по сооружению и сохраняющей постоянное направление
единичной силы F=1. Другими словами, линия влияния представляет
собой диаграмму, при построении которой функцией является
исследуемая величина усилия или перемещения, а независимой
переменной – координата точки приложения подвижного груза F=1.
Каждая ордината линии влияния, представленной в виде эпюры по
длине сооружения, численно равна значению изучаемой величины при
положении в этом месте груза F=1.
6
7.
Отметим следующие характерные особенности построения линий влиянияусилий кинематическим способом:
1) мысленно устраняем связь, препятствующую рассматриваемому
усилию совершить работу. Получаем механизм с одной степенью
свободы. Действие отброшенной связи заменяем соответствующим
положительно направленным усилием Х;
2) сообщаем этому механизму возможное перемещение таким образом,
чтобы сила X совершала положительную работу на перемещении x . В
результате приходим к эпюре возможных перемещений;
3) Линия влияния совпадает с эпюрой возможных перемещений, если ее
X =1. Ординаты линии влияния,
измерять в масштабе, для которого
оказавшиеся выше оси отсчета, считаются положительными, и – наоборот.
8.
Наличиелинии
влияния
позволяет
определять
соответствующую
характеристику сооружения для различных вариантов силового воздействия.
Делают это путем, так называемого, загружения линии влияния.
X Fi y i q j j M k tg k
i
j
k
Нагрузки F и q следует считать положительными, если их направление
совпадает с направлением единичного подвижного груза F = 1. Полагаем,
что момент m > 0, если он вращает по ходу часовой стрелки. Знаки «y» и
следует брать согласно знаков л.в. X. Знак tg
определен знаком
производной dy/dx.
8
9.
2. Построение и загружение линий влияния1 .5 6
YC 2
9кН,
2
10.
11.
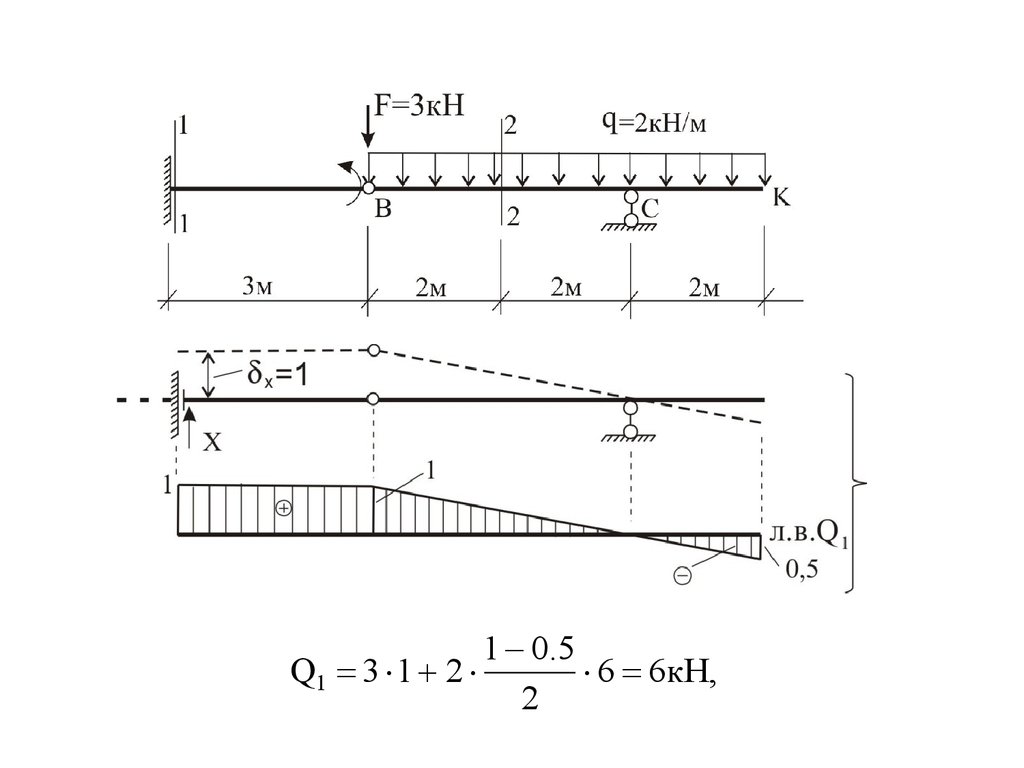
1 0.5Q1 3 1 2
6 6кН,
2
12.
13.
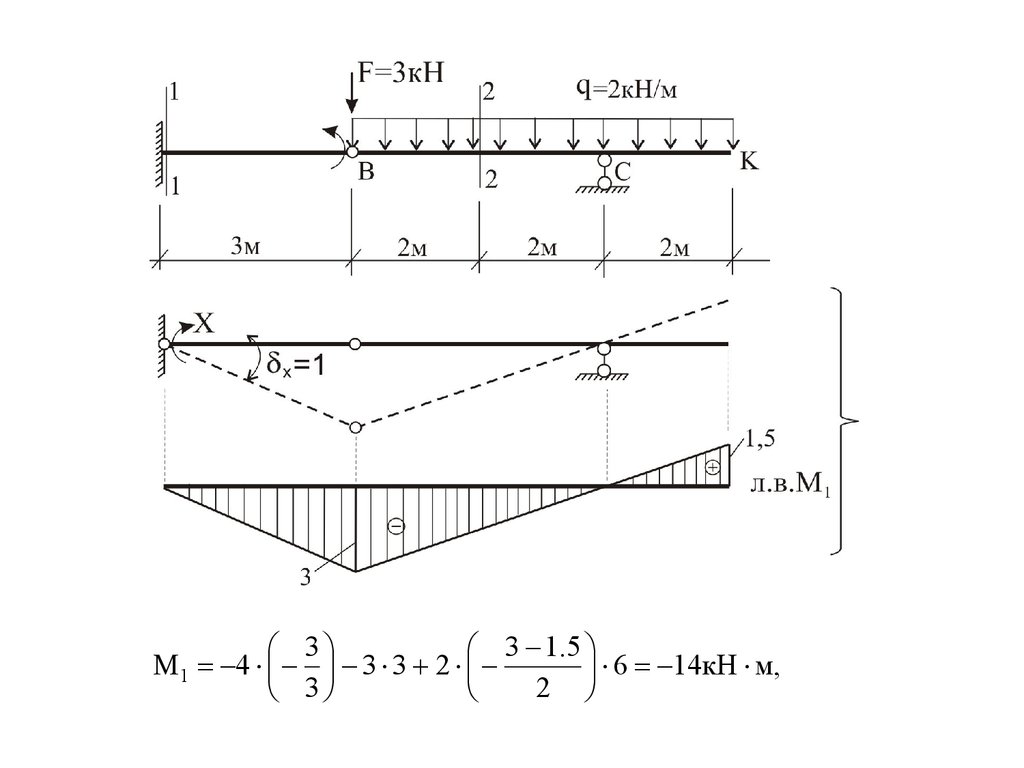
33 1.5
M1 4 3 3 2
6 14кН м,
2
3
14.
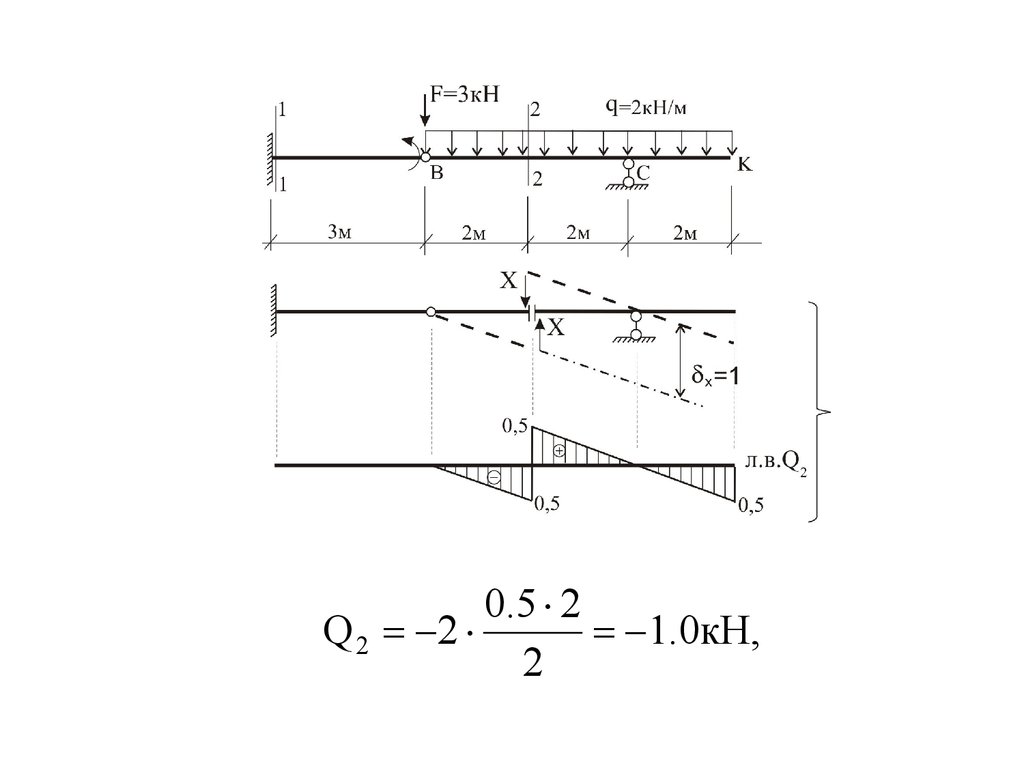
0.5 2Q 2 2
1.0кН,
2
15.
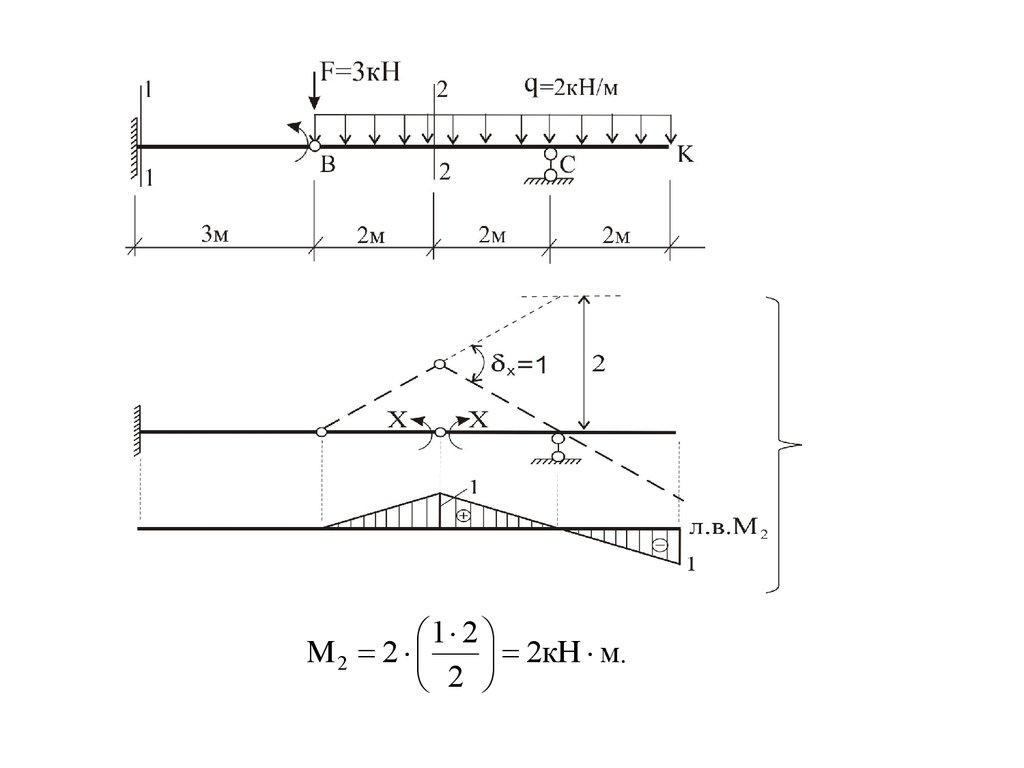
1 2M2 2
2кН м.
2
16.
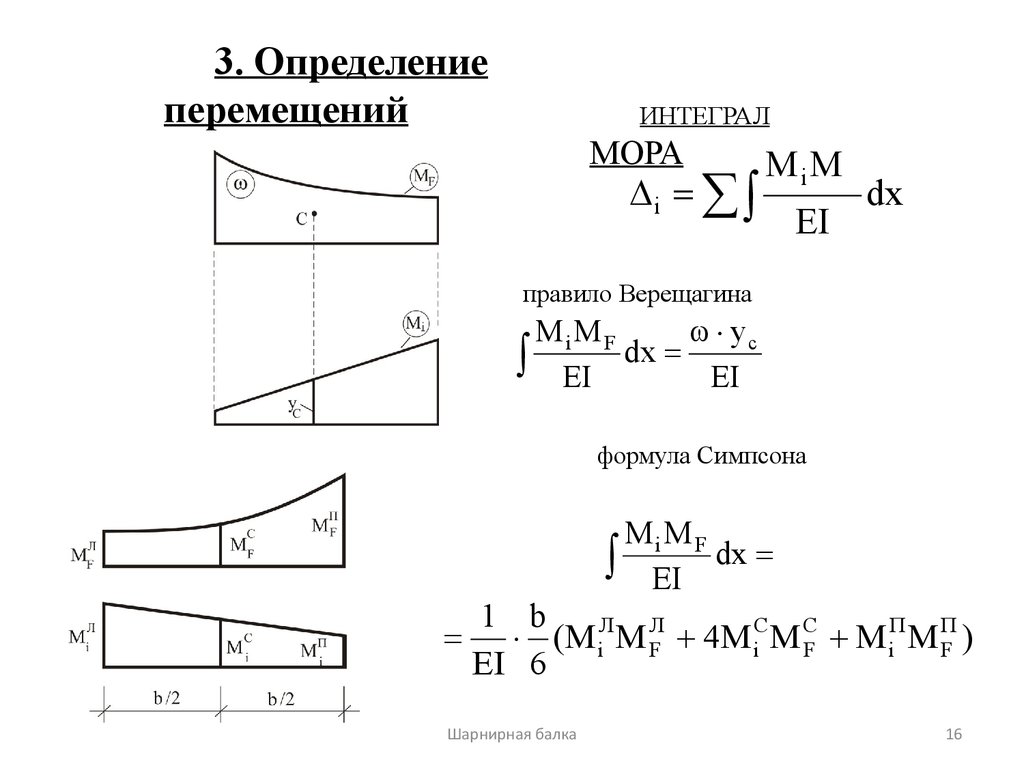
3. Определениеперемещений
ИНТЕГРАЛ
МОРА
i
MiM
EI
dx
правило Верещагина
yc
MiMF
dx
EI
EI
формула Симпсона
MiM F
EI dx
1 b Л Л
(M i M F 4M iС M СF M iП M ПF )
EI 6
Шарнирная балка
16
17.
.С
а)
к
F i= 1
к
С
б)
.
m i= 1
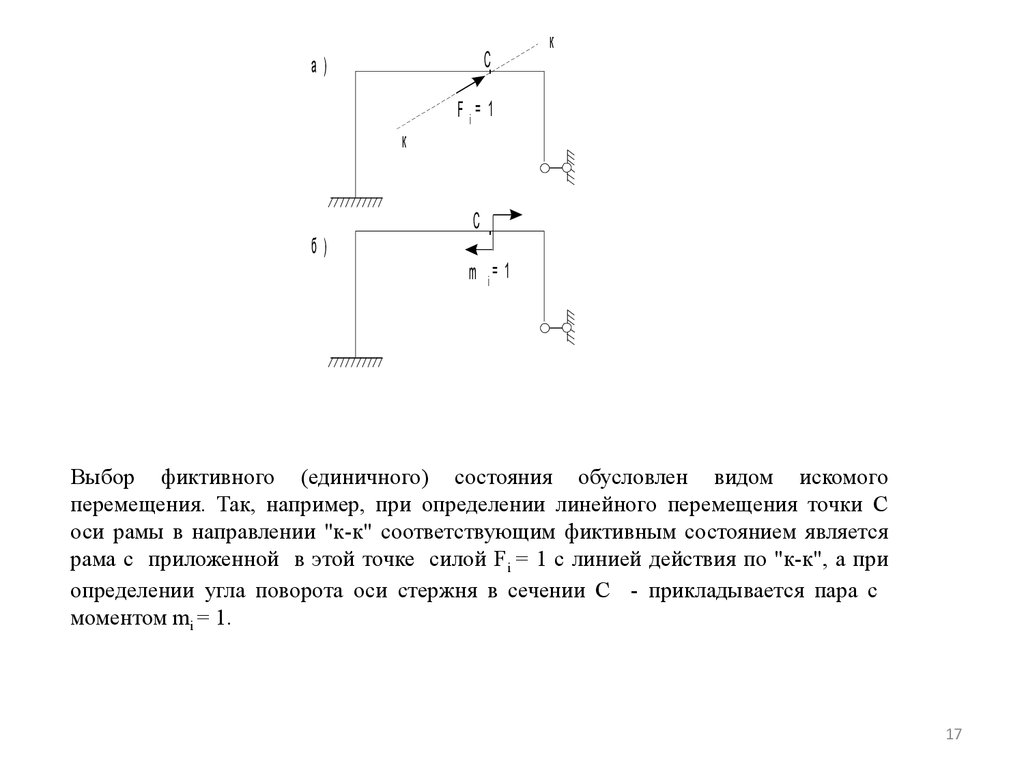
Выбор фиктивного (единичного) состояния обусловлен видом искомого
перемещения. Так, например, при определении линейного перемещения точки С
оси рамы в направлении "к-к" соответствующим фиктивным состоянием является
рама с приложенной в этой точке силой Fi = 1 с линией действия по "к-к", а при
определении угла поворота оси стержня в сечении С - прикладывается пара с
моментом mi = 1.
17
18.
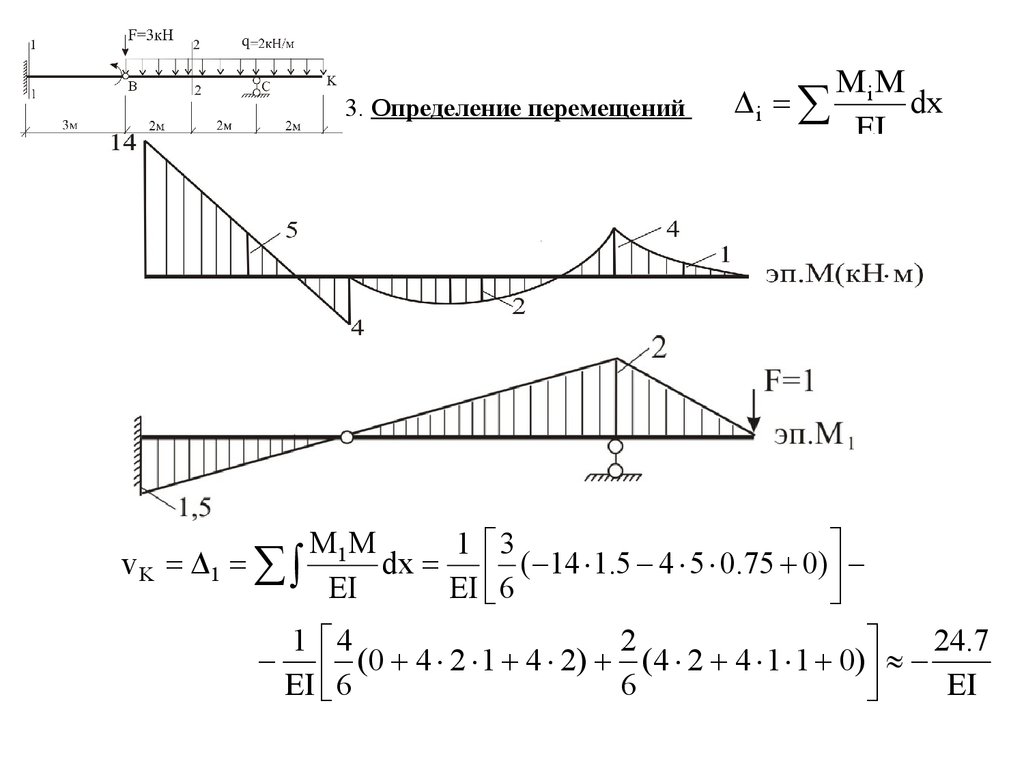
3. Определение перемещенийv K 1
i
MiM
dx
EI
M1M
1 3
dx ( 14 1.5 4 5 0.75 0)
EI
EI 6
1 4
2
24.7
(
0
4
2
1
4
2
)
(
4
2
4
1
1
0
)
EI 6
6
EI
19.
B 2M2M
1 3
7
11
4
1
21.3
dx ( 14 4 5 4 1) (0 4 2 0)
.
EI
EI 6
4
8
6
2
EI