


 First design")
 Second design")
")



")









 mode")











 informatics
informatics english
englishSimilar presentations:
")





")



Timer-counter. The AVR microcontroller and embedded systems. (Chapter 9)
1. Timer/counter
The AVR microcontrollerand embedded
systems
using assembly and c
AVR Microcontroller and Embedded System Using Assembly and C
Mazidi, Naimi, and Naimi
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
2. Guess What ?
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and NaimiEdited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
3. A counter register
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and NaimiEdited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
4. A simple design (counting people) First design
SensorAVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
5. A simple design (counting people) Second design
SensorAVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
6. A simple design (making delay)
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and NaimiEdited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
7. A generic timer/counter
Delay generatingCounting
Wave-form generating
Capturing
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
8. Timers in AVR
1 to 6 timers3 timers in ATmega32
8-bit and 16-bit timers
two 8-bit timers and one 16-bit timer in ATmega32
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
9. Timer in AVR
TCNTnTOVn
TCCRn
OCRn
(output compare register)
OCFn
(output compare match flag)
(Timer/Counter register)
(Timer Overflow flag)
(Timer/Counter control register)
TCCRn
TCNTn
TOVn
Comment:
Comment:
All
Allofofthe
thetimer
timerregisters
registersare
are
byte-addressable
byte-addressableI/O
I/Oregisters
registers
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
=
OCFn
OCRn
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
10. Timer 0 (an 8-bit timer)
The AVR microcontrollerand embedded
systems
using assembly and c
AVR Microcontroller and Embedded System Using Assembly and C
Mazidi, Naimi, and Naimi
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
11. Timer 0
TCCR0TCNT0
TOV0
=
OCF0
OCR0
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
12.
Clock ModeTimer
Selector
(WGM)
(CS)
CS02 CS01 CS00 Comment
0
0
0
0
0
0
1
1
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
No clock source (Timer/Counter stopped)
clk (No Prescaling)
Normal
clk / 8
CTC (Clear Timer on Compare Match)
clk / 64
PWM, phase correct
clk / 256
Fast PWM
clk / 1024
External clock source on T0 pin. Clock on falling edge
External clock source on T0 pin. Clock on rising edge
WGM00 WGM01 Comment
0
1
0
1
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
13. Normal mode
TCNT00xFF
0
TOV
TOV
TOV
time
FF
FE
TOV0:
0
1
2
1
0
TOV0 = 1
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
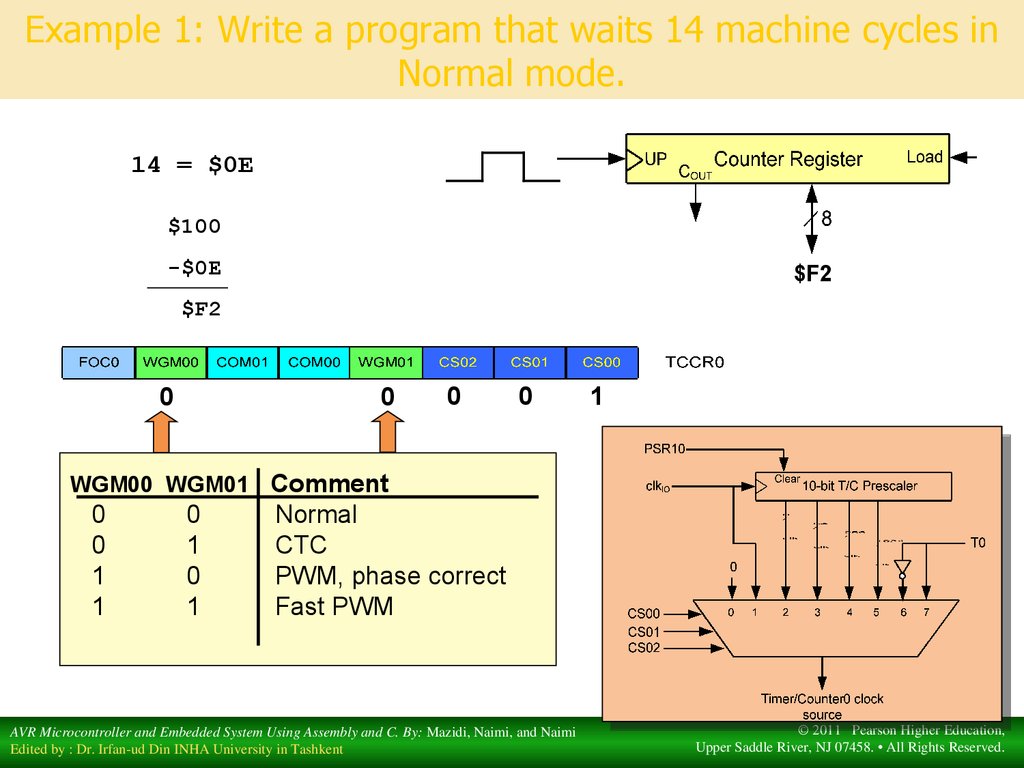
14.
Example 1: Write a program that waits 14 machine cycles inNormal mode.
14 = $0E
$100
-$0E
$F2
$F2
0
0
0
0
1
WGM00 WGM01 Comment
0
0
1
1
0
1
0
1
Normal
CTC
PWM, phase correct
Fast PWM
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
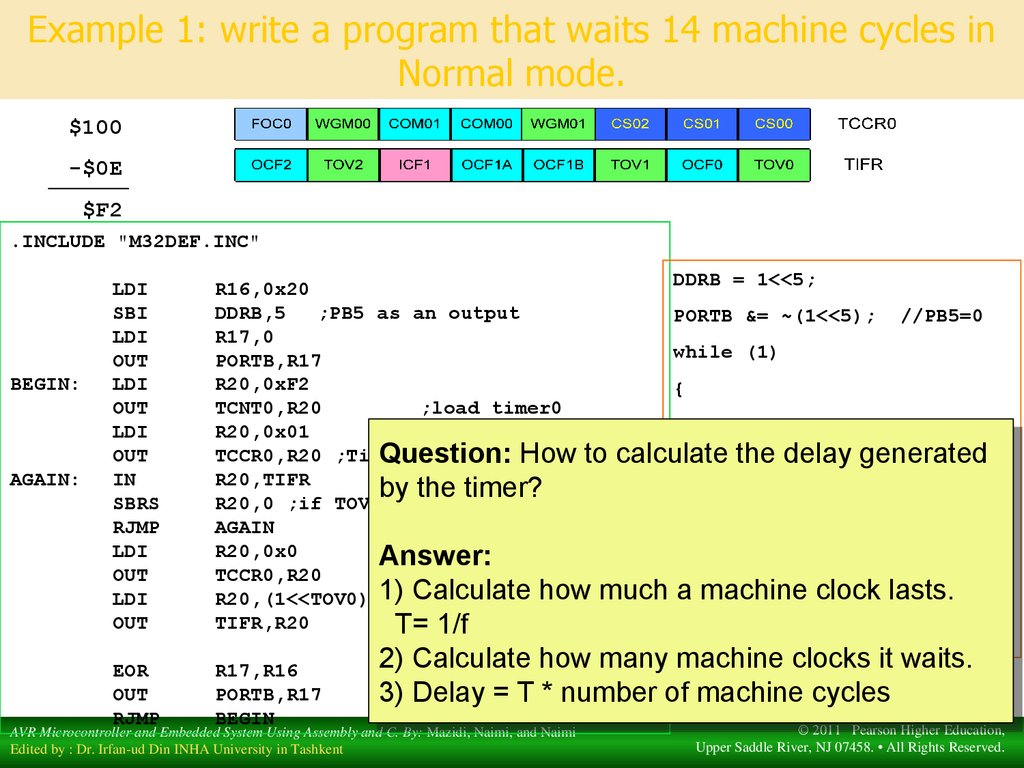
15.
Example 1: write a program that waits 14 machine cycles inNormal mode.
$100
-$0E
$F2
.INCLUDE "M32DEF.INC"
BEGIN:
AGAIN:
LDI
SBI
LDI
OUT
LDI
OUT
LDI
OUT
IN
SBRS
RJMP
LDI
OUT
LDI
OUT
EOR
OUT
RJMP
DDRB = 1<<5;
R16,0x20
DDRB,5
;PB5 as an output
PORTB &= ~(1<<5); //PB5=0
R17,0
while (1)
PORTB,R17
R20,0xF2
{
TCNT0,R20
;load timer0
TCNT0 = 0xF2;
R20,0x01
TCCR0,R20 ;Timer0,Normal
clk
Question:
How
the
TCCR0
= delay
0x01; generated
Question:mode,int
Howto
tocalculate
calculate
the
delay
generated
R20,TIFR
;read TIFR
by
the
timer?
R20,0 ;if TOV0 by
is the
set timer?
skip next inst. while((TIFR&(1<<TOV0))==0);
AGAIN
TCCR0 = 0;
R20,0x0
Answer:
Answer:
TIFR = (1<<TOV0);
TCCR0,R20
;stop Timer0
how
machine
clock
R20,(1<<TOV0) 1)
;R20
= 0x01
1)Calculate
Calculate
howmuch
muchaaPORTB
machine
clocklasts.
lasts.
= PORTB^(1<<5);
TIFR,R20
;clear
T=
1/f
T=
1/f TOV0 flag
}
2)
many
2)Calculate
Calculate
how
manymachine
machineclocks
clocksititwaits.
waits.
R17,R16
;toggle
D5how
of R17
PORTB,R17
;toggle
3)
Delay
==PB5
TT**number
of
machine
cycles
3)
Delay
number
of
machine
cycles
BEGIN
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
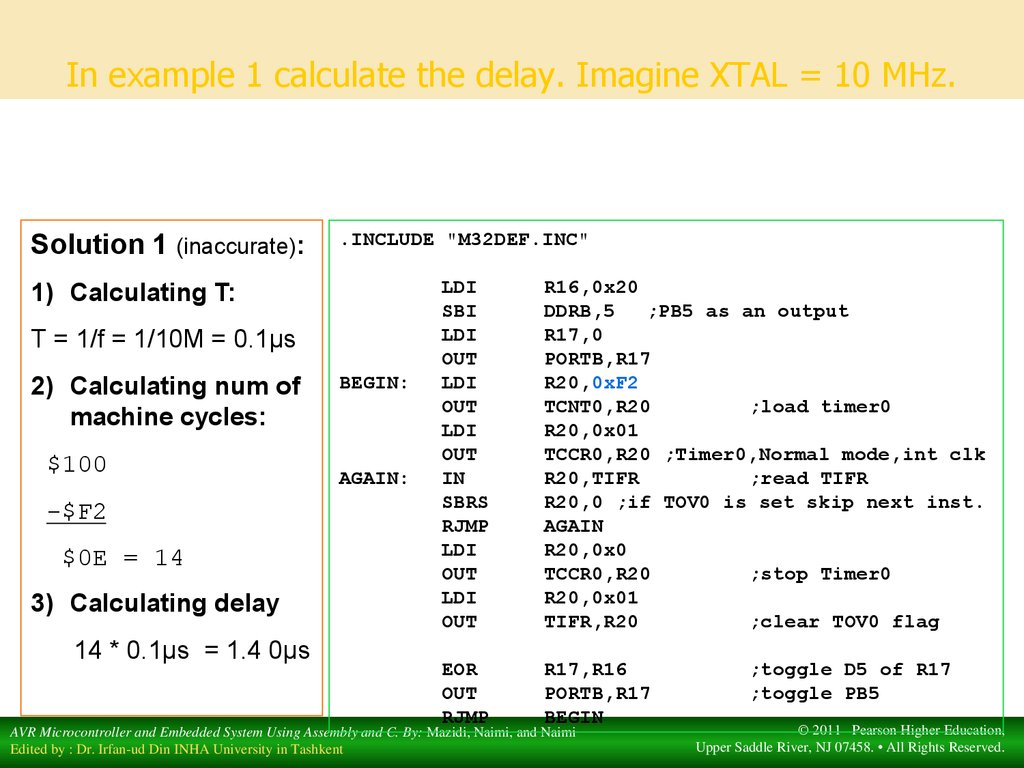
16.
In example 1 calculate the delay. Imagine XTAL = 10 MHz.Solution 1 (inaccurate):
.INCLUDE "M32DEF.INC"
1) Calculating T:
T = 1/f = 1/10M = 0.1µs
2) Calculating num of
machine cycles:
$100
-$F2
$0E = 14
3) Calculating delay
14 * 0.1µs = 1.4 0µs
BEGIN:
AGAIN:
LDI
SBI
LDI
OUT
LDI
OUT
LDI
OUT
IN
SBRS
RJMP
LDI
OUT
LDI
OUT
R16,0x20
DDRB,5
;PB5 as an output
R17,0
PORTB,R17
R20,0xF2
TCNT0,R20
;load timer0
R20,0x01
TCCR0,R20 ;Timer0,Normal mode,int clk
R20,TIFR
;read TIFR
R20,0 ;if TOV0 is set skip next inst.
AGAIN
R20,0x0
TCCR0,R20
;stop Timer0
R20,0x01
TIFR,R20
;clear TOV0 flag
EOR
OUT
RJMP
R17,R16
PORTB,R17
BEGIN
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
;toggle D5 of R17
;toggle PB5
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
17. Accurate calculating
Other than timer, executing the instructions consumes time; so if we wantto calculate the accurate delay a program causes we should add the
delay caused by instructions to the delay caused by the timer
BEGIN:
AGAIN:
LDI
SBI
LDI
OUT
LDI
OUT
LDI
OUT
IN
SBRS
RJMP
LDI
OUT
LDI
OUT
EOR
OUT
RJMP
R16,0x20
DDRB,5
R17,0
PORTB,R17
R20,0xF2
TCNT0,R20
R20,0x01
TCCR0,R20
R20,TIFR
R20,0
AGAIN
R20,0x0
TCCR0,R20
R20,0x01
TIFR,R20
R17,R16
PORTB,R17
BEGIN
1
1
1
1
1
1/2
2
1
1
1
1
1
1
2
18
Delay caused by timer = 14 * 0.1µs = 1.4 µs
Delay caused by instructions = 18 * 0.1µs = 1.8
Total delay = 3.2 µs wave period = 2*3.2 µs = 6.4 µs wave frequency = 156.25 KHz
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
18. Finding values to be loaded into the timer
Calculate the period of clock source.1.
Period = 1 / Frequency
2.
3.
4.
E.g. For XTAL = 8 MHz T = 1/8MHz
Divide the desired time delay by period of
clock.
Perform 256 - n, where n is the decimal
value we got in Step 2.
Set TCNT0 = 256 - n
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
19. Example 2: Assuming that XTAL = 10 MHz, write a program to generate a square wave with a period of 10 ms on pin PORTB.3.
For a square wave with T = 10 µs we must have a time delay of 5 µs. Because XTAL =10 MHz, the counter counts up every 0.1 µs. This means that we need 5 µs / 0.1 µs = 50
clocks. 256 - 50 = 206.
.INCLUDE "M32DEF.INC"
BEGIN:
AGAIN:
LDI
SBI
LDI
OUT
LDI
OUT
LDI
OUT
IN
SBRS
RJMP
LDI
OUT
LDI
OUT
EOR
OUT
RJMP
R16,0x08
DDRB,3
;PB3 as an output
R17,0
PORTB,R17
R20,206
TCNT0,R20
;load timer0
R20,0x01
TCCR0,R20 ;Timer0,Normal mode,int clk
R20,TIFR
;read TIFR
R20,TOV0 ;if TOV0 is set skip next
AGAIN
R20,0x0
TCCR0,R20
;stop Timer0
R20,0x01
TIFR,R20
;clear TOV0 flag
R17,R16
;toggle D3 of R17
PORTB,R17
;toggle PB3
BEGIN
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
DDRB = 1<<3;
PORTB &= ~ (1<<3);
while (1)
{
TCNT0 = 206;
TCCR0 = 0x01;
while((TIFR&0x01) == 0);
TCCR0 = 0;
TIFR = 1<<TOV0;
PORTB = PORTB ^ (1<<3);
}
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
20. Example 3: Modify TCNT0 in Example 2 to get the largest time delay possible with no prescaler. Find the delay in µs. In your calculation, do not include the overhead due to instructions.
To get the largest delay we make TCNT0 zero. This willcount up from 00 to 0xFF and then roll over to zero.
.INCLUDE "M32DEF.INC"
BEGIN:
AGAIN:
LDI
SBI
LDI
OUT
LDI
OUT
LDI
OUT
IN
SBRS
RJMP
LDI
OUT
LDI
OUT
EOR
OUT
RJMP
R16,1<<3
DDRB,3
;PB3 as an output
R17,0
PORTB,R17
R20,0x0
TCNT0,R20
;load Timer0
R20,0x01
TCCR0,R20 ;Timer0,Normal mode,int clk
R20,TIFR
;read TIFR
R20,TOV0 ;if TOV0 is set skip next
Solution
AGAIN
R20,0x0
T:
TCCR0,R201) Calculating
;stop Timer0
R20,0x01
1/10MHz
= 0.1µs
TIFR,R20 T = 1/f = ;clear
TOV0
flag
R17,R16
;toggle D3 of R17
2)
Calculating
PORTB,R17
;toggle delay
PB3
BEGIN
DDRB = 1 << 3;
PORTB &= ~(1<<3);
while (1)
{
TCNT0 = 0x0;
TCCR0 = 0x01;
while((TIFR&(1<<TOV0))==0);
TCCR0 = 0;
TIFR = 0x01;
PORTB = PORTB^(1<<3);
}
256 * 0.1µs = 25.6µs
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
21. Generating Large Delays
Using loopPrescaler
Bigger counters
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
22. Prescaler and generating a large time delay
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and NaimiEdited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
23. CTC (Clear Timer on Compare match) mode
TCNT00xFF
OCR0
0
OCR0
xx
2
1
0
OCF0
TOV0:
0
OCF0:
0
1
OCF0
OCF0
time
TOV0 = no change
OCF0 = 1
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
24. Rewrite example 2 using CTC
Example4: Rewrite
example
2 using
CTC
For a square wave with T = 10 µs we must have a time delay of 5 µs. Because XTAL =
10 MHz, the counter counts up every 0.1 µs. This means that we need 5 µs / 0.1 µs =
50 clocks. Therefore, we have OCR0= 49.
.INCLUDE "M32DEF.INC"
LDI
R16,0x08
SBI
DDRB,3
;PB3 as an output
LDI
R17,0
OUT
PORTB,R17
LDI
R20,49
OUT
OCR0,R20 ;load timer0
BEGIN:
LDI
R20,0x09
OUT
TCCR0,R20 ;Timer0,CTC mode,int clk
AGAIN:
IN
R20,TIFR
;read TIFR
SBRS
R20,OCF0 ;if OCF0 is set skip next
RJMP
AGAIN
LDI
R20,0x0
OUT
TCCR0,R20
;stop Timer0
LDI
R20,0x02
OUT
TIFR,R20
;clear TOV0 flag
EOR
R17,R16
;toggle D3 of R17
OUT
PORTB,R17
;toggle PB3
RJMP
BEGIN
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
DDRB |= 1<<3;
PORTB &= ~(1<<3);
while (1)
{
OCR0 = 49;
TCCR0 = 0x09;
while((TIFR&(1<<OCF0))==0);
TCCR0 = 0; //stop timer0
TIFR = 0x02;
PORTB.3 = ~PORTB.3;
}
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
25. Timer2
Timer0TOV0
Timer2
TCCR0
TCCR2
TCNT0
TCNT2
=
OCF0
OCR0
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
TOV2
=
OCF2
OCR2
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
26. The difference between Timer0 and Timer2
Timer0CS02 CS01 CS00 Comment
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
Timer/Counter stopped
clk (No Prescaling)
clk / 8
clk / 64
clk / 256
clk / 1024
External clock (falling edge)
External clock (rising edge)
Timer2
CS22 CS21 CS20 Comment
0
0
0
0
1
1
1
1
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
Timer/Counter stopped
clk (No Prescaling)
clk / 8
clk / 32
clk / 64
clk / 128
clk / 256
clk / 1024
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
27. Timer 1
OCR1BHOCR1BL
=
TCCR1A
TCNT1H TCNT1L
TCCR1B
=
TOV1
OCR1AH
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
OCF1B
OCF1A
OCR1AL
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
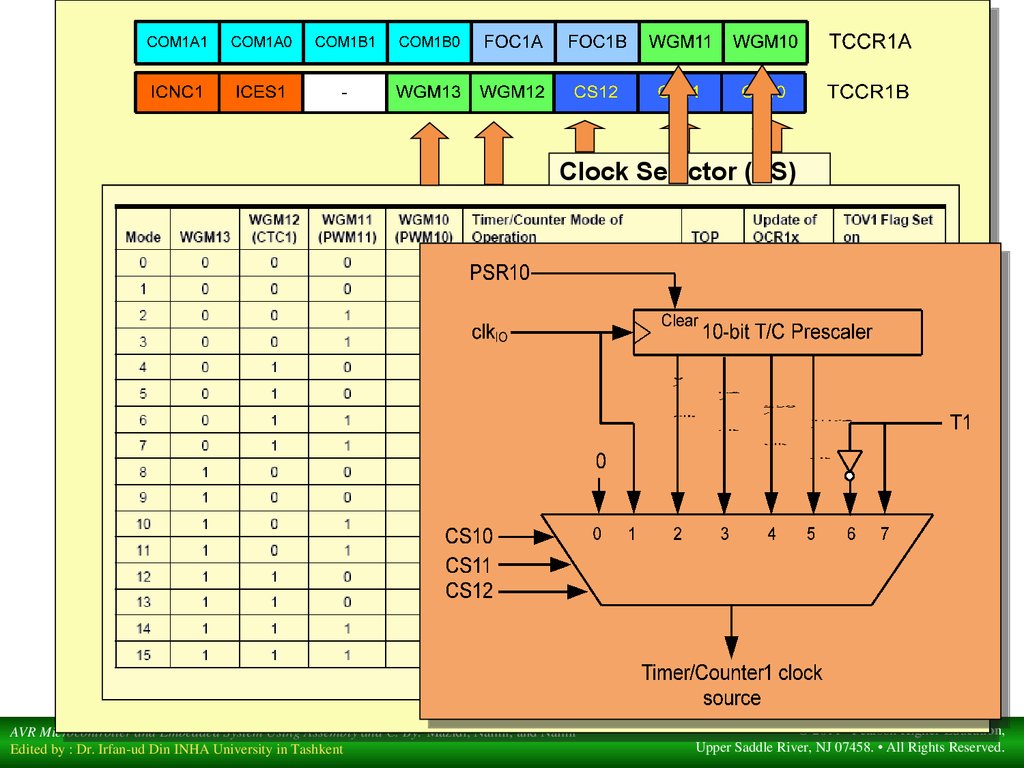
28.
Clock Selector (CS)CS12 CS11 CS10 Comment
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
No clock source (Timer/Counter stopped)
clk (No Prescaling)
clk / 8
clk / 64
clk / 256
clk / 1024
External clock source on T0 pin. Clock on falling edge
External clock source on T0 pin. Clock on rising edge
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
29. Assuming XTAL = 10 MHz write a program that toggles PB5 once per millisecond, using Normal mode.
XTAL10 MHz 1/10
MHzpointer
= 0.1 µs
LDI =
R16,HIGH(RAMEND)
;init stack
OUT
SPH,R16
Num.
machine cycles = 1 ms / 0.1 µs = 10,000
LDI of
R16,LOW(RAMEND)
OUT
SPL,R16
TCNT1
= 65,536
– an10,000
= 55,536 = $D8F0
SBI
DDRB,5
;PB5 as
output
.INCLUDE "M32DEF.INC"
BEGIN:SBI
RCALL
CBI
RCALL
RJMP
PORTB,5
;PB5 = 1
DELAY_1ms
PORTB,5
;PB5 = 0
DELAY_1ms
BEGIN
TCNT1H
TCNT1L
DELAY_1ms:
LDI
R20,0xD8
LDI
R20,HIGH(-10000)
OUT
TCNT1H,R20
;TEMP = 0xD8
OUT
TCNT1H,R20
LDI
R20,0xF0
LDI
R20, ,LOW(-10000)
OUT
TCNT1L,R20
;TCNT1L
0xF0, TCNT1H
= TEMP
OUT
TCNT1L,R20
;Timer1 =overflows
after
10000 machine cycles
LDI
R20,0x0
OUT
TCCR1A,R20
;WGM11:10=00
LDI
R20,0x1
OUT
TCCR1B,R20
;WGM13:12=00,CS=CLK
AGAIN:IN R20,TIFR ;read TIFR
SBRS R20,TOV1 ;if OCF1A is set skip next instruction
RJMP AGAIN
LDI
R20,1<<TOV1
OUT
TIFR,R20 ;clear TOV1 flag
LDI
R19,0
OUT
TCCR1B,R19
;stop timer
OUT
TCCR1A,R19
;
RET
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
30. TEMP register
LDIR20,0xF3
IN R20,TCNT1L
OUT
TCNT1H,R20
IN R21,TCNT1H
LDI
R20,0x53
OUT
TCNT1L,R20
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
a = TCNT1L;
TCNT1H
= 0xF3;
b = TCNT1H;
TCNT1L
= 0x53;
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
31. Assuming XTAL = 10 MHz write a program that toggles PB5 once per millisecond, using CTC mode.
.INCLUDE "M32DEF.INC"LDI
R16,HIGH(RAMEND)
OUT
SPH,R16
LDI
R16,LOW(RAMEND)
OUT
SPL,R16
SBI
DDRB,5
;PB5 as an output
BEGIN:SBI
PORTB,5
;PB5 = 1
RCALL DELAY_1ms
CBI
PORTB,5
;PB5 = 0
RCALL DELAY_1ms
RJMP
BEGIN
DELAY_1ms:
LDI
OUT
OUT
LDI
OUT
LDI
OUT
LDI
OUT
LDI
OUT
AGAIN:
IN
SBRS
RJMP
LDI
OUT
LDI
OUT
OUT
RET
R20,0x00
TCNT1H,R20
TCNT1L,R20
R20,0x27
OCR1AH,R20
R20,0x0F
OCR1AL,R20
R20,0x3
TCCR1A,R20
R20,0x19
TCCR1B,R20
;TEMP = 0
;TCNT1L = 0, TCNT1H = TEMP
;TEMP = 0x27
;OCR1AL = 0x0F, OCR1AH = TEMP
;WGM11:10=11
;WGM13:12=11,CS=CLK
R20,TIFR
;read TIFR
R20,OCF1A
;if OCF1A is set skip next instruction
AGAIN
R20,1<<OCF1A
TIFR,R20
;clear OCF1A flag
R19,0
TCCR1B,R19 ;stop timer
TCCR1A,R19 ;
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
32. Counting
The AVR microcontrollerand embedded
systems
using assembly and c
AVR Microcontroller and Embedded System Using Assembly and C
Mazidi, Naimi, and Naimi
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
33. Counting
T06
7
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
34. Example Assuming that clock pulses are fed into pin T0, write a program for counter 0 in normal mode to count the pulses on falling edge and display the state of the TCNT0 count on PORTC.
.INCLUDECBI
LDI
OUT
LDI
OUT
AGAIN:
IN
OUT
IN
SBRS
RJMP
LDI
OUT
RJMP
"M32DEF.INC"
DDRB,0
R20,0xFF
DDRC,R20
R20,0x06
TCCR0,R20
R20,TCNT0
PORTC,R20
R16,TIFR
R16,TOV0
AGAIN
R16,1<<TOV0
TIFR, R16
AGAIN
;make T0 (PB0) input
;make PORTC output
;counter, falling edge
;PORTC = TCNT0
;keep doing it
;keep doing it
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.
35. Assuming that clock pulses are fed into pin T1. Write a program for counter 1 in CTC mode to make PORTC.0 high every 100 pulses.
.INCLUDE "M32DEF.INC"CBI
DDRB,1
;make T1 (PB1) input
SBI
DDRC,0
;PC0 as an output
R20,0x0
TCCR1A,R20
R20,0x0E
TCCR1B,R20
;CTC, counter, falling edge
LDI
OUT
LDI
OUT
AGAIN:
LDI
OUT
LDI
OUT
L1: IN
SBRS
RJMP
LDI
OUT
R20,0
OCR1AH,R20
R20,99
OCR1AL,R20
R20,TIFR
R20,OCF1A
L1
R20,1<<OCF1A
TIFR, R20
SBI PORTC,0
CBI PORTC,0
RJMP AGAIN
;TEMP = 0
;ORC1L = R20, OCR1H = TEMP
;keep doing it
;clear OCF1A flag
;PC0 = 1
;PC0 = 0
;keep doing it
AVR Microcontroller and Embedded System Using Assembly and C. By: Mazidi, Naimi, and Naimi
Edited by : Dr. Irfanud Din INHA University in Tashkent
© 2011 Pearson Higher Education,
Upper Saddle River, NJ 07458. • All Rights Reserved.