





 mechanics
mechanics drafting
draftingSimilar presentations:



")





")
Розрахунок планетарного редуктора
1.
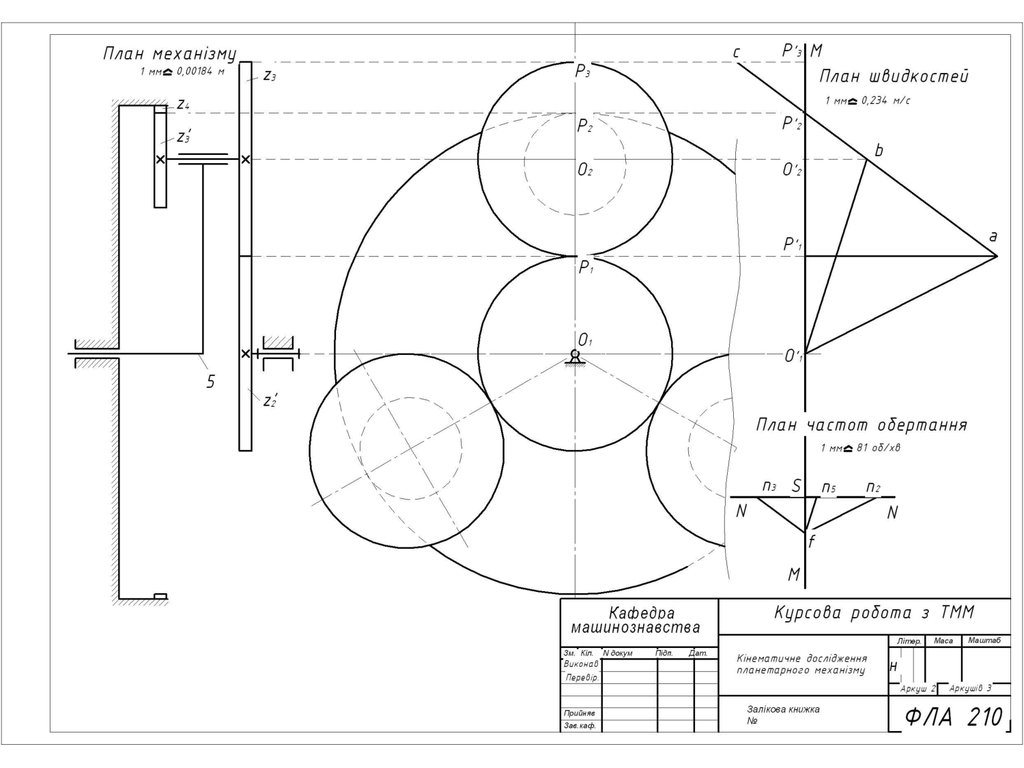
КІНЕМАТИЧНЕ ДОСЛІДЖЕННЯПЛАНЕТАРНОГО РЕДУКТОРА
2.
Вибір схеми планетарного механізму3.
Визначення кількості зубів коліс планетарного механізмуУмова
співвісності
Умова правильного зачеплення: z1 17; z2 20; z3 85; z3– z2 8.
Умова складання
z1 u14
k
Умова сусідства
z2 2ha*
sin
,
k
z1 z2
4.
Визначення кількості зубів коліс планетарного механізмуУмова співвісності вхідного та вихідного валів визначає те,
що обидва центральні зубчасті колеса і водило повинні мати
загальну геометричну вісь обертання, завдяки чому
забезпечується зачеплення сателітів із центральними колесами.
Ця умова обмежує вибір розмірів одного з чотирьох коліс при
заданих радіусах трьох інших.
Умова правильного зачеплення враховує відсутність підрізу
зубів і заклинювання передачі. Для циліндричних зубчастих
коліс без зміщення, які нарізуються стандартним рейковим
інструментом (кут профілю α = 20°, коефіцієнт головки зуба
h*a=1, для запобігання підрізу зубів їх кількість має бути не
меншою від 17.
5.
Умова складання за рівних кутів між сателітами враховуєнеобхідність одночасного зачеплення всіх сателітів із
центральними колесами. Після встановлення першого
сателіта рухоме центральне колесо займе цілком визначене
положення, і якщо не виконати деяких вимог, то при
встановленні наступних сателітів їхні зуби можуть бути
зміщені відносно западин одного з центральних коліс, у
результаті чого виконати складання механізму неможливо.
Умова сусідства враховує необхідність сумісного
розміщення кількох сателітів по загальному колу. Для її
виконання необхідно, щоб діаметр кола вершин зубів
більших за розміром сателітів був дещо меншим, ніж відстань
між осями їх обертання. У цьому разі сусідні сателіти не
будуть чіпляти зубами один одного.
6.
Кінематичне дослідженняпланетарних механізмів
графічним методом
7.
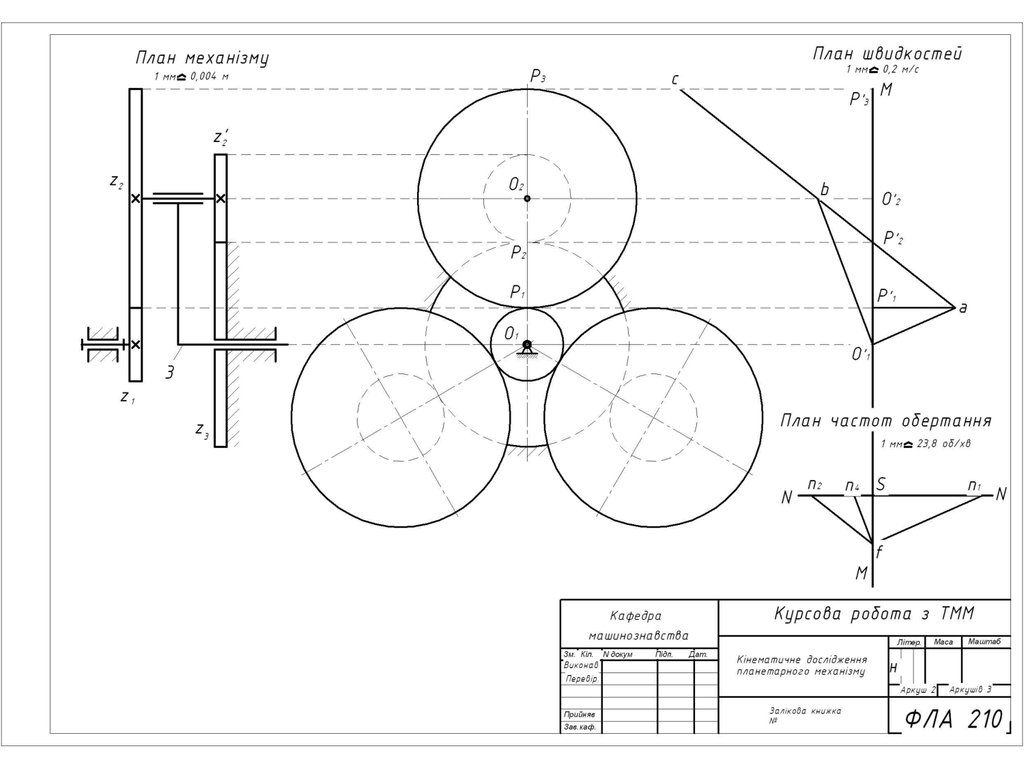
dw1 = d1 = m ∙ z1, dw2 = d2 = m ∙ z2, dw3 = d3 = m ∙ z3, мм.kl d 3 d
P’2
План
швидкостей
3
М
VK 2 KV K ' k 2
О’2 V
O2
К’
К
VK 4 KV K ' k 4
b
k4
P’1
К
k2
Vp1
О’1
a
n1
ì
r1
30
ñ
V ì / ñ
KV P1
P1' a ì ì
VP1
30 K
V
План частот K n
sf K l
обертань
n4
S
N n2
n
K sn1 sn1
u '14 1 n
n 4 K n sn4 sn4
u u '14
u14 14
100 % 4 %
u14
î á / õâ
ìì
n1
N
n1 K n sn1 , î á / õâ
f
М
n 2 K n sn2 , î á / õâ
n 4 K n sn4 , î á / õâ
8.
9.
10.
11.
Побудова геометричної картиниевольвентного зачеплення