


























 physics
physicsSimilar presentations:
")
")




Elektriska piedzina. (№1)
1. ELEKTRISKĀ PIEDZIŅA
Elektriskā piedziņa ir mācība parelektrisko motoru racionālu
izmantošanu tautsaimniecībā
2. SATURS
IEVADS. ELEKTRISKĀS PIEDZIŅAS JĒDZIENSELEKTRISKĀS PIEDZIŅAS ATTĪSTĪBAS VĒSTURE
ELEKTRISKĀS PIEDZIŅAS MEHĀNIKA
ELEKTRISKĀS PIEDZIŅAS MEHĀNISKĀS RAKSTURLĪKNES UN DARBA REŽĪMI
ELEKTRISKĀS PIEDZIŅAS GRIEŠANĀS FREKVENCES REGULĒŠANA
ELEKTRISKĀS PIEDZIŅAS PĀREJAS PROCESI
ELEKTRISKĀS PIEDZIŅAS ENERĢĒTIKA
ELEKTRISKĀS PIEDZIŅAS DZINĒJU IZVĒLE
3. IZMANTOJAMĀ LITERATŪRA
Ribickis L., Valeinis J. Elektriskā piedziņa mehatronikas sistēmās. – Rīga: RTU,
2008. – 286 lpp.
Ribickis L. Elektriskās mašīnas un elektriskā piedziņa XIX gadsimtā. – Rīga:
RTU, 2008. – 199 lpp.
Ribickis L., Stankevičs I. Automātiskā elektriskā piedziņa. – Rīga: RPI, 1988. –
87 lpp.
Ribickis L. Automātiskā elektriskā piedziņa. Pārejas procesi. Dzinēju izvēle. 2.d.
– Rīga: RPI, 1984. – 69 lpp.
Ribickis L., Raņķis I. Electrical Drives. – Rīga: RTU, 1996. – 108 p.
Cūbergs I. Regulējama automātiskā elektriskā piedziņa. – Rīga: Junda, 1998. –
70 lpp.
Baumanis V. Elektriskās piedziņas teorija. 1.d. – Rīga: RPI, 1975. – 213 lpp.
Чилиkин М.Г., Сандлер А.С. Общий курс електропривода. – М. :
Энергoиздат, 1971. -576 с.
Mohan N. Electric Drives. An Integrative Approach. – Minneapolis: MNPERE,
2000. – 500 p.
Leonhard W. Control of Electrical Drives. – Berlin: Springer, 2001, 460 p.
4.
Definīcija:Elektriskā piedziņa pārveido elektrisko enerģiju
mehāniskajā un nodrošina ražošanas iekārtas vadību
ar elektrību.
5.
ELEKTROENERĢIJAS AVOTSELEKTRISKĀ DAĻA
VADĪBAS
SISTĒMA
DZINĒJS
VS
SD
EMP
VS
ID
NO ATGR.
SAITĒM
MEHĀNISKĀ DAĻA
DZIN.
ROTORS
PM
ATGRIEZENISKĀS
SAITES
NO KOMANDIEKĀRTAS
Elektriskās piedziņas struktūrshēma.
DM
6.
~UV
U=const
f1=const
ID
PP
D
n1
PM
n2
DM
n3
U=var
f2=var
Regulējamas maiņstrāvas piedziņas struktūrshēma:
PP – vadāms spēka elektronikas pārveidotājs,
D – dzinējs jeb elektromehāniskais parveidotājs,
PM - pārvades mehānisms vai reduktors un DM – darba mašīna.
Uv – vadības spriegums, U1 un U2 – ieejas un izejas spriegumi,
f1 un f2 – ieejas un izejas frekvences,
ID – dzinēju strāva, n1 – dzinēja griešanās frekvence, n2 – reduktora izejas griešanās
frekvence, n3 – darba mašīnas izejas griešanās frekvence.
7. Elektriskās piedziņas sastāvs
8.
Elektriskās piedziņas sastāvs9. Elektriskās piedziņas darbības varianti
Elektroenerģija → mehāniskā (motors = dzinējs)Mehāniskā → elektriskā (motors = ģenerators)
0 < n < nmax → nereversīvā piedziņa
-nmax < n < nmax → reversīvā piedziņa
10. Elektriskās piedziņas darbības varianti
Nereversīvā piedziņa1
3
dn
0
dt
paātrināšana
2
4
dn
0
dt
stacionārā
darbība
5
dn
0
dt
bremzēšana
11. Elektriskās piedziņas darbības varianti
Reversīvā piedziņa1,3,
7
dn
0
dt
paātrināšana
2,4,
6,8
dn
0
dt
stacionārā
darbība
5,9
dn
0 reversēšana =
dt
bremzēšana
+
palaišana pretējā
virzienā
12. Nominālie lielumi
Nominālā jauda uz vārpstas PN W; kWNominālais rotācijas ātrums nN 1/min
Nominālais moments MN Nm
Nominālā strāva IN A
Nominālais lietderības koeficients N
no tīkla patērētā jauda P1 W; kW
zudumi motorā
PN PN (
1 N
N
) W; kW
13. Elektriskās piedziņas mehānika
M dz F R[ Nm ]
2 n
60
[ rad/s ]
v R
[ m/s ]
Pdz M dz
[ rot.W ]
P F v
[ lin.W ]
14. Pārveidošana mehāniskā kustībā
ndzz1
i
nmeh z
red 1
Pmeh Pdz
M meh M dz i
15. Pārveidošana mehāniskā kustībā
Pr red PdzM red red M dzi
Fr
Rr
Rr
2 nmeh
vr Rr
Rr
60
ndz
nmeh
i
Pdz
Fr vr
red
ndz nmax (4000 min 1 )
16.
MOMENTU REDUCĒŠANAReducētai un reālai sistēmai jābūt ar vienām un tām
pašām kinemātiskām un dinamiskām īpašībām.
a)
b)
DZINĒJS
DARBA
MAŠĪNA
PĀRVADS
Jdz
Mst
ωdz
i
Jdz
Mst
ωdz
i1
Mm
ωm
Jm
im
J1
ω1
m
Vm
Piedziņas kinemātiskās shēmas momentu reducēšanai:
a – griezes kustībai; b – virzes kustībai
17.
Momentu reducēšana griezes kustības gadījumā pamatojas uzreālās un reducētās jaudas vienādību:
M st dz M m m ,
- darba mašīnas statiskais moments, kas reducēts uz
dzinēja vārpstas;
Mm
- darba mašīnas statiskais moments uz savas vārpstas;
ωdz, ωm
- attiecīgi dzinēja un darba mašīnas vārpstu
leņķiskie
ātrumi;
η
- pārvada lietderības koeficents.
kur
Mst
m
1
M st M m
Mm ,
dz
i
kur
i = ωdz/ωm - pārvada pārnesuma skaitlis.
Reducēšanas izteiksme vairāku pārvada elementu gadījumā ir
M st M m
1
i1 i2 ...im 1 2 ... m
.
18.
Inerces momentu reducēšana uz dzinēja vārpstas pamatojas uz to, kareducētās un reālās sistēmas kinētiskajām enerģijām ir jābūt
vienādām:
J red dz2 J dz dz2 J1 12
J m m2
...
,
2
2
2
2
kur Jred - uz dzinēja vārpstas reducētais sistēmas kopējais inerces moments;
Jdz, J1, Jm - attiecīgo piedziņas elementu inerces momenti.
J red J dz J1 (
1 2
) ... J m ( m )2 ,
dz
dz
vai
J red
1
1
J dz J1 2 ... J m 2 .
i1
im
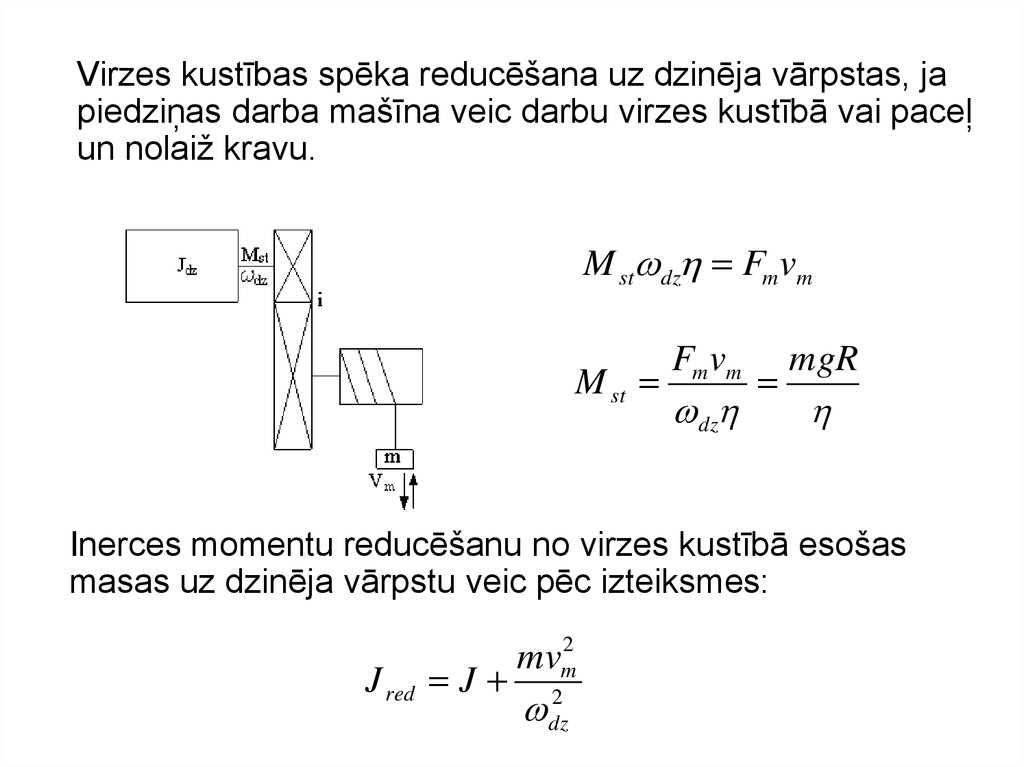
19.
Virzes kustības spēka reducēšana uz dzinēja vārpstas, japiedziņas darba mašīna veic darbu virzes kustībā vai paceļ
un nolaiž kravu.
M st dz Fmvm
M st
Fm vm
dz
mgR
Inerces momentu reducēšanu no virzes kustībā esošas
masas uz dzinēja vārpstu veic pēc izteiksmes:
J red J
mvm2
dz2
20. Kustības vienādojums
dM dz M st M din J
dt
Mdz – motora moments, Nm
Mst – statiskais pretestības moments, Nm
Mdin – dinamiskais moments, Nm
J – inerces moments, kg·m2
dω/dt – leņķiskais paātrinājums, 1/s2
J mrot R
2
rot
Mrot – rotora masa, kg; Rrot – rotora radius, m
21.
Aprēķinos bieži inerces momenta vietā lieto spara momentuGD 4 gJ , [ Nm ],
2
kur
2
g - brīvās krišanas paātrinājums.
Tad griezes kustības vienādojumu var uzrakstīt šādi:
M dz M st M din
2
GD dn
,
375 dt
kur n - griešanās frekvence, apgr./min.
22.
Kustības vienādojuma analīze rāda, ka iespējamitrīs gadījumi:
a) Mdz > Mst - dzinējs paātrinās,
b) Mdz = Mst - vienmērīga kustība,
c) Mdz < Mst - dzinējs palēninās.
Ja moments jeb spēks veicina kustību pieņemtajā
pozitīvajā virzienā, tad šādu momentu jeb spēku
pieņem par pozitīvu, ja pretojas, tad par negatīvu.
23.
Elektriskās piedziņas kursā izmanto šādusakarību starp momentu un jaudu:
P
M 9550 ,
n
kur
P - dzinēja jauda, kW.
24. Pretestības moments
1 – aktīvais- ceļamās ietaises
25. Pretestības moments
2 – reaktīvaisn a
M M ( M M )( )
nN
*
st
*
0
M 0* M 0* / M N
-
M b* M b / M N
-
MN
-
n
nN
a
-
*
b
*
0
statiskā momenta daļa, kas nav atkarīga no
griešanās frekvences;
statiskā momenta daļa, kas atkarīga no
griešanās frekvences;
nominālais darba mašīnas statiskais
moments;
darba mašīnas griešanās frekvence;
nominālā griešanās frekvence;
pakāpes rādītājs
26. Pretestības moments
2 – reaktīvaisa = 0, Mst = const
- transportieri ar
nemainīgu kravu
- daži
metālapstrādes
darbagaldi
a = 1, Mst ≡ n
- ģenerators, kas
baro patērētāju
ar nemainīgu
pretestību
- transporta
mašīnas
a = 2, Mst ≡ n2
- ventilatori
- kompresori
- sūkni
a = -1, Mst ≡ 1/n
- metālapstrādes
darba mašīnas
27. Piedziņas darbības stabilitāte
n < nstd
M M st J
0
dt
Stabila piedziņas
darbība
n < nst
d
0
dt
Nestabila piedziņas
darbība
M M st J
28.
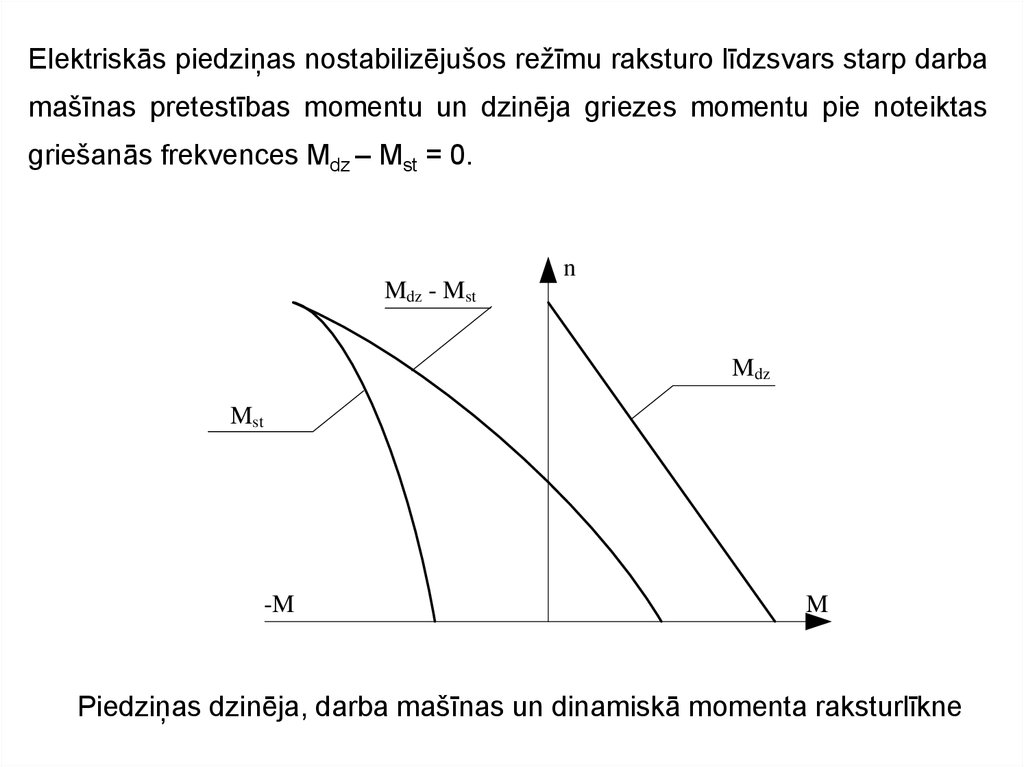
Elektriskās piedziņas nostabilizējušos režīmu raksturo līdzsvars starp darbamašīnas pretestības momentu un dzinēja griezes momentu pie noteiktas
griešanās frekvences Mdz – Mst = 0.
Mdz - Mst
n
Mdz
Mst
-M
M
Piedziņas dzinēja, darba mašīnas un dinamiskā momenta raksturlīkne
29.
Elektriskiem dzinējiem izšķir dabisko unmākslīgo mehānisko raksturlīkni.
Par dabisko dzinēja mehānisko raksturlīkni sauc
n = f(M) vai ω = f(M) grafisko attēlu,
kas ir dzinējam ar normālu slēguma shēmu un
nomināliem barošanas avota parametriem.
30. Dzinēju mehāniskās raksturlīknes
1 – absolūti cieta2 – cieta
3 - mīksta
31.
Vēl elektrisko dzinēju raksturlīknes raksturo pēc kritērija, kosauc par cietību jeb stingumu:
dM
tg
.
dn
Raksturlīknes cietība nosaka dzinēja griešanās frekvences
izmaiņu atkarībā no slodzes maiņas.
Jo mazāk izmainās griešanās frekvence, mainoties slodzes
momentam, jo stabilāks piedziņas darbs un lielāka cietība.
32.
Visu elektrisko dzinēju mehāniskās raksturlīknes iedalatrijās grupās:
1.
Raksturlīkne ir absolūti cieta, ja griešanās frekvence
n = const. Tāda mehāniskā raksturlīkne ir sinhronam
dzinējam stabilā darba režīmā.
2.
Raksturlīkne ir cieta, ja griešanās frekvence samērā maz
izmainās, mainot slodzi. Tādas mehāniskās raksturlīknes ir
neatkarīgās ierosmes līdzstrāvas dzinējam un asinhronajam
dzinējam nominālās slodzes robežās.
3.
Raksturlīkne ir mīksta, ja griešanās frekvence strauji mainās
atkarībā no slodzes. Tāda raksturlīkne ir līdzstrāvas virknes
ierosmes dzinējam.
33.
Griešanās frekvences regulēšanuraksturo rādītāji:
1. Regulēšanas diapazons
2. Regulēšanas vienmērīgums
3. Regulēšanas ekonomiskums
4. Griešanās frekvences stabilitāte
5. Regulēšanas virziens
6. Pieļaujamā dzinēja slodze
34.
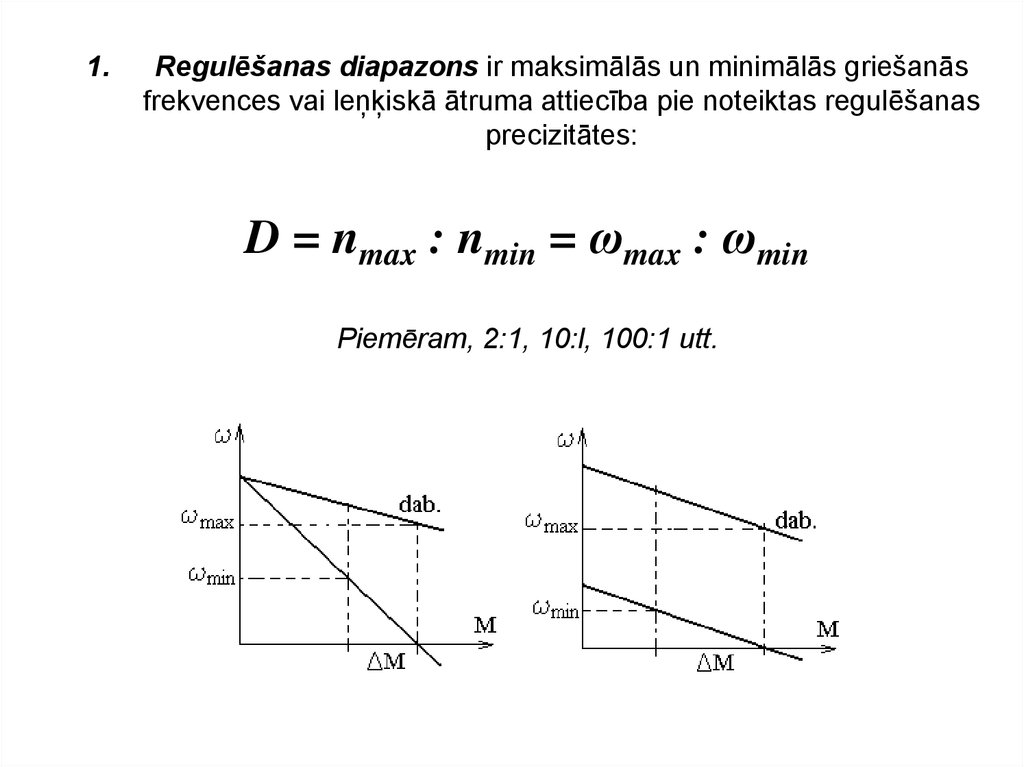
1.Regulēšanas diapazons ir maksimālās un minimālās griešanās
frekvences vai leņķiskā ātruma attiecība pie noteiktas regulēšanas
precizitātes:
D = nmax : nmin = ωmax : ωmin
Piemēram, 2:1, 10:l, 100:1 utt.
35.
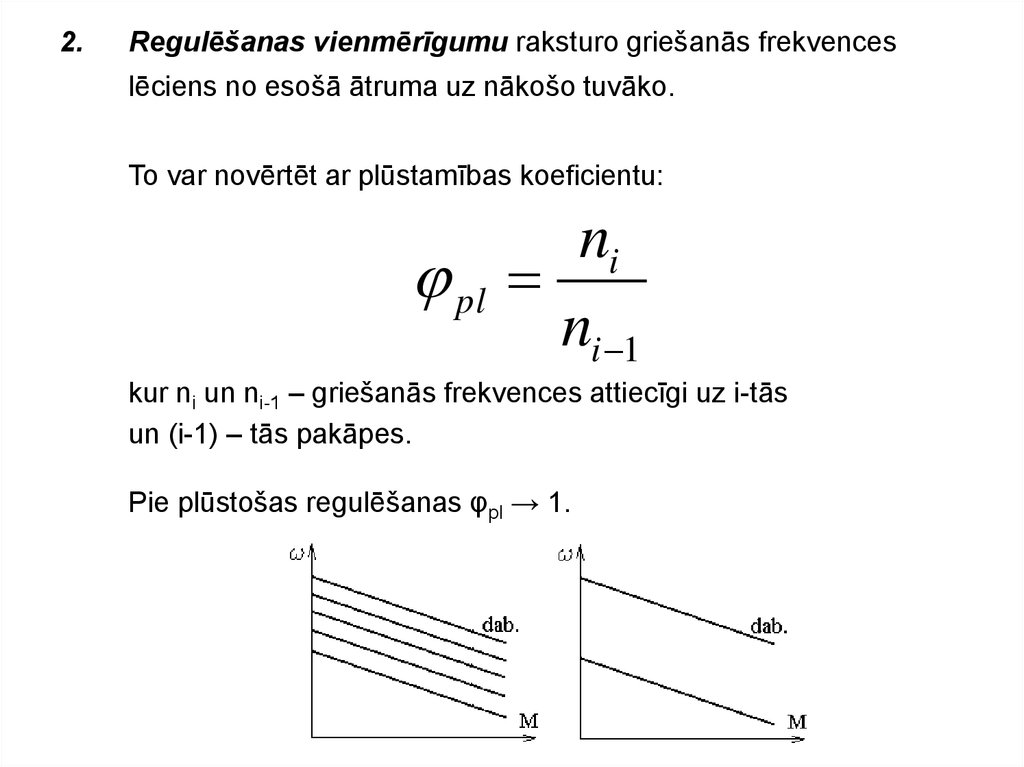
2.Regulēšanas vienmērīgumu raksturo griešanās frekvences
lēciens no esošā ātruma uz nākošo tuvāko.
To var novērtēt ar plūstamības koeficientu:
ni
pl
ni 1
kur ni un ni-1 – griešanās frekvences attiecīgi uz i-tās
un (i-1) – tās pakāpes.
Pie plūstošas regulēšanas φpl → 1.
36.
3.Regulēšanas ekonomiskumu raksturo regulējamās
piedziņas uzstādīšanas un ekspluatācijas izdevumi.
Regulējamas piedziņas jaudas koeficients cosφ ir nozīmīgs
ekonomisks rādītājs.
Tas norāda uz iekārtas reaktīvās enerģijas patēriņu.
Vairumam dzinēju cosφNOM = 0,8 - 0,9.
37.
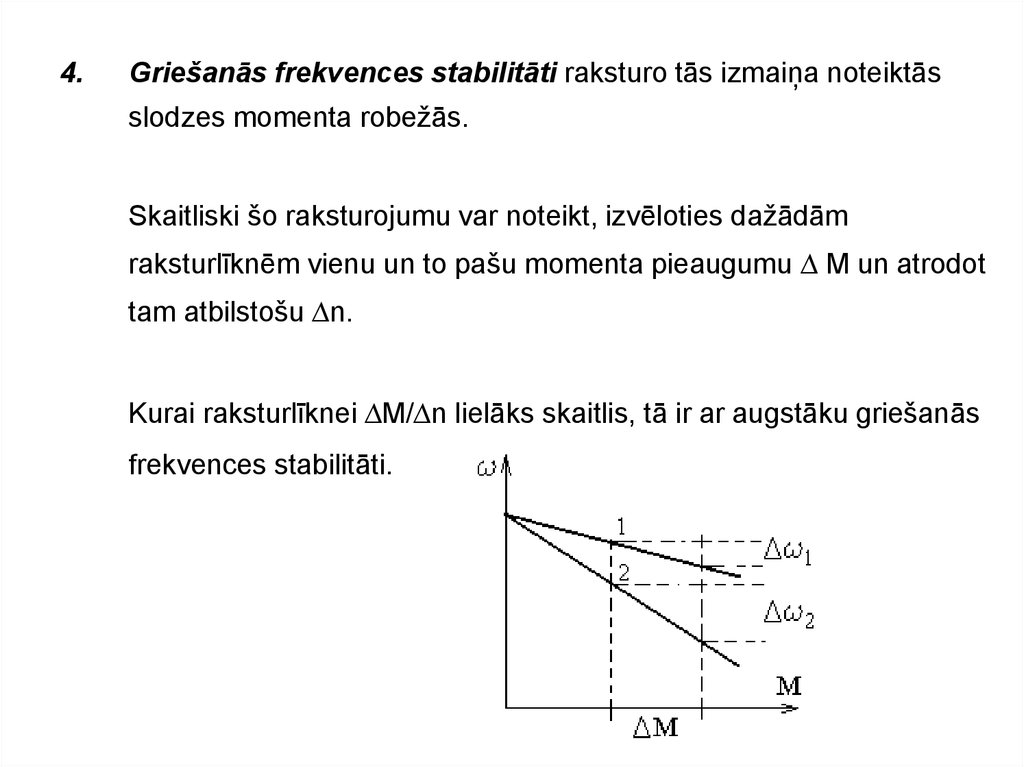
4.Griešanās frekvences stabilitāti raksturo tās izmaiņa noteiktās
slodzes momenta robežās.
Skaitliski šo raksturojumu var noteikt, izvēloties dažādām
raksturlīknēm vienu un to pašu momenta pieaugumu ∆ M un atrodot
tam atbilstošu ∆n.
Kurai raksturlīknei ∆M/∆n lielāks skaitlis, tā ir ar augstāku griešanās
frekvences stabilitāti.
38.
5.Regulēšanas virziens nosaka kā var mainīt piedziņas griešanās
frekvenci, virs vai zem nominālās.
6.
Pieļaujamo dzinēja slodzi raksturo maksimālais
dzinēja attīstītais moments.