



")


















 входящие в него параметры МИ и W, введем")







 mechanics
mechanicsSimilar presentations:


")


")

")
")

Блок-схема машин. Понятие детали и сборочной единицы. МП
1.
4. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ.Вопросы, изложенные в лекции:
4.1 Блок-схема машин. Понятие детали и сборочной
единицы. МП.
4.2 Зубчатые передачи
Учебная литература:
1.Прикладная
механика. Иосилевич Г.Б., Лебедев П.А.,
Стеблов В.С.- М.: Машиностроение, 1985. – 576 с.(315-372)
2.Детали
машин и подъемное оборудование. Под рук. Г.И.
Мельникова - М.: Воениздат, 1980. стр. 56-66.
3.Соловьев
В.И. Детали машин (Курс лекций. II часть). Новосибирск: НВИ, 1997. стр. 87-105.
2. 4.1 Блок-схема машин. Понятие детали и сборочной единицы. МП.
Каждая машина обычно состоит из трех частей:► двигатель,
► передаточный механизм (или передача),
► исполнительный механизм.
► Передаточный механизм необходим для
согласования режима работы двигателя с режимом
работы исполнительного механизма (обычно,
уменьшение частоты вращения, увеличение
вращающего момента).
3.
Механическими передачами, или просто передачаминазывают механизмы, передающие работу двигателя исполнительному органу машины. Передавая механическую
энергию, передачи одновременно могут выполнять
следующие функции:
► понижать (редукторы) и повышать (мультипликаторы)
угловые скорости, соответственно повышая или понижая
вращающие моменты;
► преобразовывать один вид движения в другой
(вращательное в возвратно-поступательное, равномерное в
прерывистое и т.д.);
► регулировать угловые скорости рабочего органа машины;
► реверсировать движение (прямой и обратный ход);
► распределять работу двигателя между несколькими
исполнительными органами машины.
► Передаточное отношение - отношение частот
вращения валов в направлении силового потока.
4.
4.1.2 Классификация передач механической
энергии.
В зависимости от принципа действия все передачи
делятся на две группы:
передачи трением – фрикционные и ременные;
передачи зацеплением – зубчатые, червячные, цепные.
Все передачи трением имеют повышенный износ
рабочих поверхностей, так как в них неизбежно
проскальзывание одного звена относительно другого.
В зависимости от способа соединения ведущего и
ведомого звеньев бывают:
передачи непосредственного контакта – фрикционные
зубчатые, червячные;
передачи гибкой связью – ременные, цепные.
Передачи гибкой связью допускают значительные
расстояния между ведущим и ведомым валами.
5.
6.
Основные силовые и кинематические
соотношения в передачах
Выбор типа передачи и ее применение определяется
следующими основным характеристиками:
мощностью на ведущем W1 и ведомом W2 валах;
угловой скоростью ведущего ω 1 и ведомого ω2 валов
(рисунок 4.1).
Это две основные характеристики, необходимые для
выполнения проектного расчета любой передачи.
7. Рассмотрим некоторые кинематические и силовые соотношения на примере двухступенчатого редуктора (типа привода тигельных машин)
1 n1 В двухступенчаi1 2передаче с
2 n2 той
приводом от
электродвигателя
(рисунок 4.2) при
частоте вращения двигателя n1
вал 2 имеет
частоту вращения n2, а вал 3 –
n3. Передаточным отношением
ступени i называют отношение
угловых
скоростей валов
1 и 2.
8.
1 n1
i1 2
► Передаточное отношение ступени i :
2 n2
n2 n1 / i1 2 ; n3 n2 / i2 3 n1 / i1 2 i2 3.
► Тогда
развиваемый электродвигателем крутящий момент при
мощности W1 и угловой скорости вращения ω1
(1)
T1
или
103W1
1
9550W1
T1
n1
(2)
(3)
где T1 – в Н·мм; W1 – в Вт; ω1 – в с-1; n – в мин-1.
Коэффициент полезного действия ступени определяют
отношением мощности на валах 1 и 2
1 2
W2
.
W1
(4)
9.
Тогда мощности на валах 2 и 3
W2 W1 1 2 ;W3 W2 2 3 W1 2
1 2 3 .
(5)
При известном крутящем моменте на валу 1 T1 крутящие
моменты 2 и 3
T2 T1 i1 2 1 2 ;
T3 T2 i2 3 2 3
Привод с крутящим моментом T3 и частотой вращения n3
может быть использован при соединении вала 3:
с валом с помощью муфты для вращательного движения;
с валом кривошипно-кулисного механизма для поворота
ведомого вала на необходимый угол;
с винтом для поступательного перемещения гайки со
столом на определенную длину l.
(6)
10.
При использовании в приводе кулачковых, мальтистских,
рычажных, стержневых механизмов можно получать
различные законы движения исполнительного механизма.
Зависимость между развиваемым двигателем крутящим
моментом Tдв и противодействующими моментами
определяется основным уравнением движения
механизма:
d 2 dI п
Iп
►
Tc Tдв ,
dt
2 d
где Iп – момент инерции механизма, приведенный к валу
электродвигателя;
ὠ – угловая скорость вращения электродвигателя;
Tc – момент сил сопротивления исполнительного
механизма, приведенный к валу электродвигателя;
φ – угол поворота звена приведения (вала
электродвигателя).
(7)
11.
d 2 dI ï
Iï
Tä называют
В уравнении величину
dt
2 d
динамическим моментом.
В случае, когда момент инерции механизма не изменяется с
углом поворота φ,
.
dI ï
0
Тогда уравнение (7) принимает вид
d
Tд Tc Tдв
(8)
При определении динамического момента
d
Tд I п
I п
d
d - угловое ускорение звена приведения,
►
d рассчитывают при исследовании переходного
процесса работы механизма, который типичен для
моментов разгона, останова и реверса.
► При работе привода в режиме длительной постоянной или
незначительно меняющейся нагрузки
d
Tд I п
0
d
(9)
12.
Расчеты показывают, что при передаточных отношениях
редуктора i ð 1 приведенный к валу электродвигателя
момент инерции Iп мало отличается от момента инерции
ротора Iр. При расчетах принимают
Iм
I п I р 2 (1,1
1,4) I р ,
iр
(10)
где Iм – момент инерции приводимого в движение
механизма.
► В теории электропривода при определении момента
инерции ротора электродвигателя используют связь между
его величиной и маховым моментом, обозначаемым в
каталогах через GD2 :
2
GD
I p MR
,
4g
2
(11)
где M – масса ротора; R – радиус инерции, G – вес тела, Н.
13.
Приближенно моменты инерции звеньев можно
вычислить, если звенья условно расчленить на
отдельные цилиндры. Тогда искомые моменты инерции
определяют как сумму моментов инерции
составляющих цилиндров.
Для сплошного цилиндра массой М, диаметром d
момент инерции относительно продольной оси
2
Md
I
.
8
При известной плотности ρ и длине l момент инерции
цилиндра
2
4
Md
d l
(12)
4
I
8
32
0,1d l.
14. 4.2 Зубчатые передачи
4.2.1 Общие сведения и классификация зубчатых
передач
Механизм, в котором два подвижных звена являются
зубчатыми колесами, образующими с неподвижным звеном
вращательную или поступательную пару, называют
зубчатой передачей (рис. 4.3).
Меньшее из колес передачи принято называть шестерней,
а большее – колесом, звено зубчатой передачи,
совершающее прямолинейное движение, называют
зубчатой рейкой (рис. 4.3, г).
При одинаковых размерах колес шестерней называют
ведущее зубчатое колесо. Параметры шестерни
сопровождаются индексом “1”, а колеса – “2”.
15. Рис. 4.3 - Виды зубчатых передач: а, б, в — цилиндрические зубчатые передачи с внешним зацеплением; г — реечная передача; д —
цилиндрическая передача с внутренним зацеплением; е — зубчатаявинтовая передача; ж, з, и — конические зубчатые передачи; к —
гипоидная передача
16.
►Зубчатыепередачи и колеса классифицируют по следующим
признакам (см. рис. 4.3):
►-
по взаимному расположению осей колес: с параллельными осями
(цилиндрические, см. рис. 4.3, а—д), с пересекающимися осями
(конические, см. рис. 4.3, ж—и), со скрещивающимися осями (винтовые,
см. рис. 4.3, е, гипоидные, см.рис. 4.3,к), с преобразованием движения
(реечные, см. рис. 4.3, г);
►- по расположению зубьев относительно образующих колес:
прямозубые (продольная ось зуба параллельна образующей поверхности
колеса (рис. 4.3, а)); косозубые (продольная ось зуба направлена под
углом к образующей поверхности колеса (рис. 4.3, б)); шевронные (зуб
выполнен в форме двух косозубых колес со встречным наклоном осей
зубьев (рис. 4.3, в)); с круговым зубом (ось зуба выполнена по окружности
относительно образующей поверхности колеса);
►- по направлению косые зубья бывают правые и левые.
►- шевронные колеса по виду шеврона бывают с непрерывным
шевроном (см. рис. 4.3,в) и имеющие между полушевронами канавку для
выхода режущего инструмента.
►- по конструктивному оформлению: открытые (бескорпусные) и
закрытые (корпусные). Конструктивно зубчатые передачи большей частью
выполняют закрытыми в общем жестком и герметичном корпусе, что
обеспечивает им высокую точность сборки и защиту от загрязнения.
17.
►-по окружной скорости: тихоходные (до 3 м/с), для средних скоростей (3—15 м/с), быстроходные (св. 15 м/с);
►- по числу ступеней: одно- и многоступенчатые;
►- по расположению зубьев в передаче и колесах: внешнее (зубья
направлены своими вершинами от оси вращения колеса (см. рис. 4.3, а, б,
в)), внутреннее (зубья одного из зацепляющихся колес направлены своими
вершинами к оси вращения колеса (см. рис. 4.3, д)) и реечное зацепление
(одно из колес заменено прямолинейной зубчатой рейкой (см. рис. 4.3, г));
►- по форме профиля зуба: эвольвентные - рабочий профиль зуба
очерчен по эвольвенте круга (линия описываемая точкой прямой,
катящейся без скольжения по окружности); циклоидальные - рабочий
профиль зуба очерчен по круговой циклоиде (линия описываемая точкой
окружности, катящейся без скольжения по другой
окружности); цевочное (разновидность циклоидального) – зубья одного из
колес, входящих в зацепление, заменены цилиндрическими пальцами –
цевками; с круговым профилем зуба (зацепление Новикова) – рабочие
профили зубьев образованы дугами окружности практически одинаковых
радиусов.
►- по относительной подвижности геометрических осей зубчатых
колес: с неподвижными осями колес - рядовые передачи; с подвижными
осями некоторых колес - планетарные передачи.
►- по жесткости зубчатого венца колес, входящих в зацепление: с
колесами неизменяемой формы (с жестким венцом); включающая колеса с
18.
- по величине передаточного числа:
с передаточным числом u ≥ 1 – редуцирующие (редукторы большинство зубчатых передач);
с передаточным числом u < 1 – мультиплицирующие
(мультипликаторы).
Реализуемое передаточное число может быть постоянным и ступенчаторегулируемым осевым перемещением колес по валу (в коробках
скоростей).
-. по точности зацепления
Стандартом предусмотрено 12 степеней точности. Практически
передачи общего машиностроения изготовляют от шестой до десятой
степени точности. Передачи, изготовленные по шестой степени
точности, используют для наиболее ответственных случаев.
- по назначению различают:
силовые передачи, предназначенные для передачи мощности;
кинематические передачи, то есть передачи, не передающие
значительной мощности, а выполняющие чисто кинематические
функции.
19.
4.2.2 Достоинства и недостатки зубчатых передачОсновные достоинства зубчатых передач по сравнению с другими
передачами:
- технологичность, постоянство передаточного числа;
- высокая нагрузочная способность (до N=50000 кВт);
- высокий КПД (до 0,97-0,99 для одной пары колес);
- малые габаритные размеры по сравнению с другими видами передач
при равных условиях;
- большая надежность в работе, простота обслуживания;
- сравнительно малые нагрузки на валы и опоры.
К недостаткам зубчатых передач следует отнести:
- невозможность бесступенчатого изменения передаточного числа;
- высокие требования к точности изготовления и монтажа;
- шум при больших скоростях; плохие амортизирующие свойства;
- громоздкость при больших расстояниях между осями ведущего и ве
домого валов;
- потребность в специальном оборудовании и инструменте для
нарезания зубьев;
- высокая жесткость, не позволяющая компенсировать динамические
нагрузки;
- нерациональное использование зубьев – в работе передачи
одновременно участвуют обычно не более двух зубьев каждого из
зацепляющихся колёс;
- зубчатая передача не предохраняет машину от возможных опасных
перегрузок.
20.
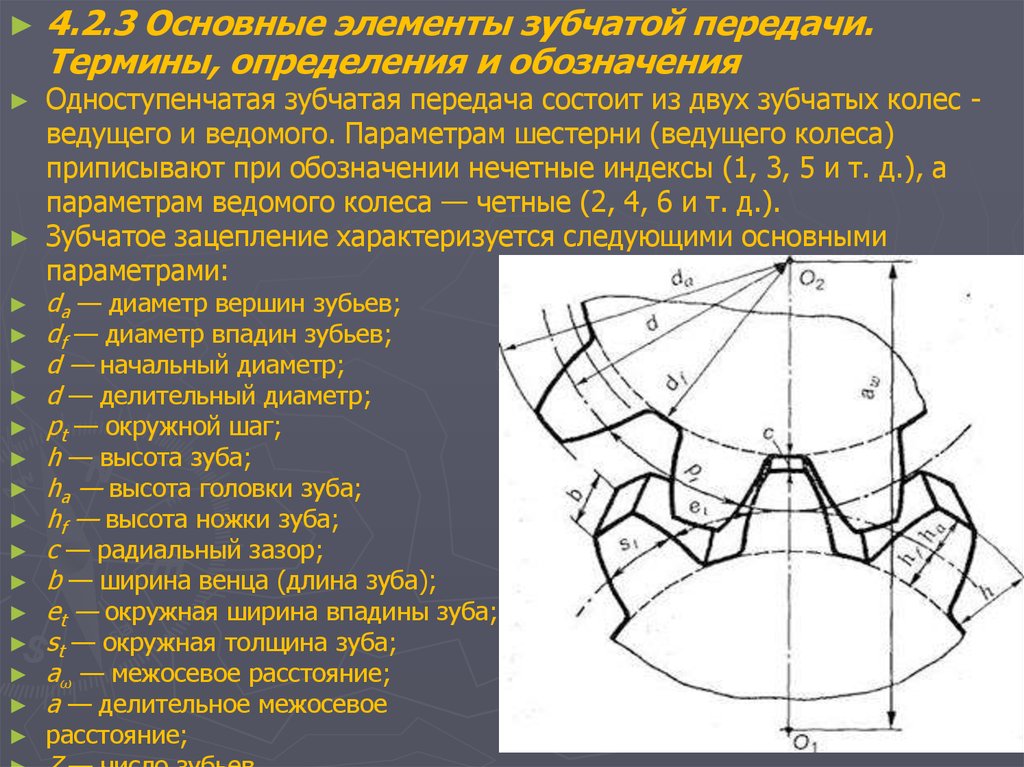
4.2.3 Основные элементы зубчатой передачи.
Термины, определения и обозначения
Одноступенчатая зубчатая передача состоит из двух зубчатых колес ведущего и ведомого. Параметрам шестерни (ведущего колеса)
приписывают при обозначении нечетные индексы (1, 3, 5 и т. д.), а
параметрам ведомого колеса — четные (2, 4, 6 и т. д.).
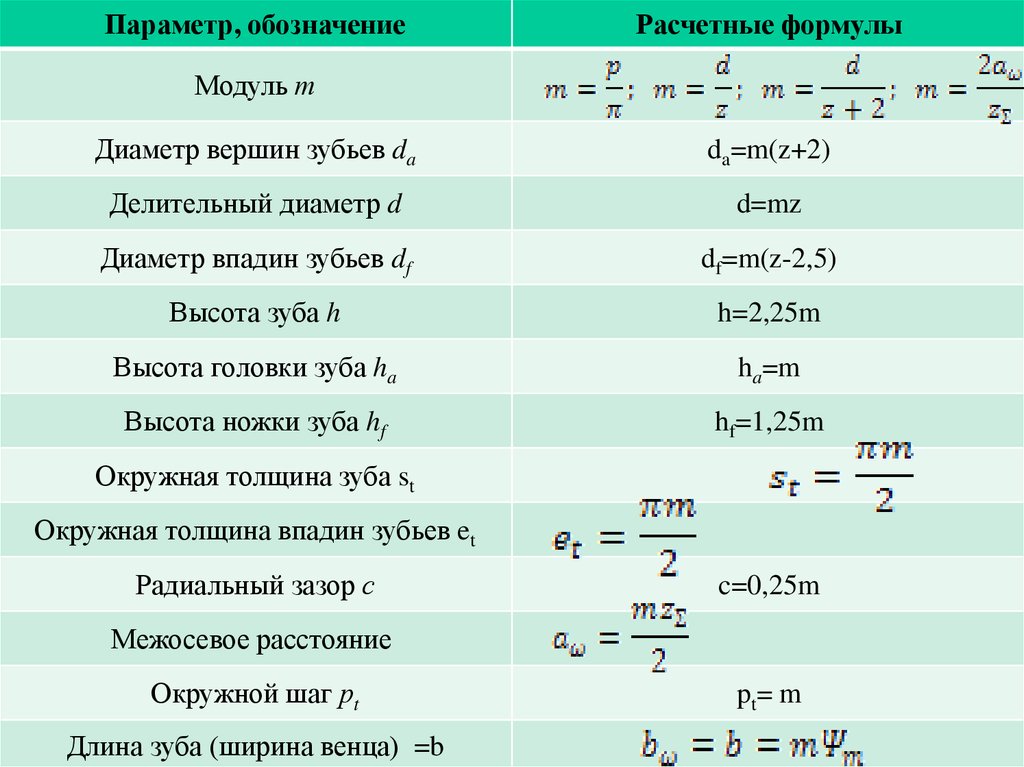
Зубчатое зацепление характеризуется следующими основными
параметрами:
da — диаметр вершин зубьев;
df — диаметр впадин зубьев;
d — начальный диаметр;
d — делительный диаметр;
рt — окружной шаг;
h — высота зуба;
ha — высота головки зуба;
hf — высота ножки зуба;
с — радиальный зазор;
b — ширина венца (длина зуба);
еt — окружная ширина впадины зуба;
st — окружная толщина зуба;
a