



 electronics
electronicsSimilar presentations:










Автоматизированное регулирование скорости движения отцепов АРС
1.
АРС2.
Одним из наиболее сложных технологических процессов работы сортировочнойгорки является регулирование скорости движения отцепов на спускной части горки и в
сортировочном парке. Сложность определяется необходимостью обеспечивать высокий
темп роспуска составов с соблюдением необходимых интервалов между отцепами.
Отцеп должен следовать до вагонов, стоящих на подгорочном пути, и подходить к ним
с допустимой скоростью соударения.
3.
Для решения задачи автоматизированного регулирования скорости движенияотцепов во ВНИИЖТе с конца пятидесятых годов велась разработка системы
автоматического регулирования скорости движения отцепов (АРС). Система
предусматривала третью тормозную позицию (парковые замедлители меньшей
мощности), устройства определения весовых категорий, длины и ходовых свойств
отцепов, приборы измерения скорости их движения (радиолокационный измеритель
скорости) и систему контроля заполнения путей под горочного парка. Оптимальная
скорость выхода отцепов с каждой тормозной позиции определялась счетнорешающей схемой, и в зависимости от этой скорости менялась степень торможения.
4.
5.
Первую опытную установку системы АРС-ЦНИИ, разработанной воВНИИЖТе, осуществили на станции Лосиноостровская в 1961 году. В
дальнейшем систему дорабатывали и в 1973 году в более совершенном виде
ввели на станции Орехово-Зуево.
Второй вариант системы АРС создали в ГТСС. Он использовал те же
основные принципы, что и в системе, разработанной во ВНИИЖТе, но отличался
способами учета индивидуальных свойств отцепюв, системой контроля
заполнения путей подгорочного парка, назначением тормозных позиций и
некоторыми другими техническими решениями. По системе ГТСС в 1964 году
оборудовали сортировочную горку на станции Ленинград-СортировочныйМосковский.
6.
В настоящее время в России проектируются и строятся две современныемикропроцессорные системы АРС:
•Система АРС-ГТСС, входящая в состав КТС ГАЦ-АРС ГТСС
•Система АРС УУПТ (управления устройствами прицельного
торможения, входящая в состав системы КСАУ СП.
7.
Для функционирования системы АРС необходимы:1. Замедлители интервальных и парковых тормозных позиций с управляющей
аппаратурой
2. Устройства контроля заполнения путей подгорочного парка (КЗП),
предоставляющие данные о расстоянии до впередистоящих вагонов
3. Измерители скорости движения отцепов в зоне тормозных позиций
4. Устройства формирования описателя отцепа (измерительный участок,
весомер), предоставляющие данные о весе и длине отцепа
5. Управляющий вычислительный комплекс и схемы управления
6. Устройства управления замедлителями на пульте управления
7. Устройства отображения расчетных и фактических скоростей, а также
состояния замедлителей на пульте управления.
8.
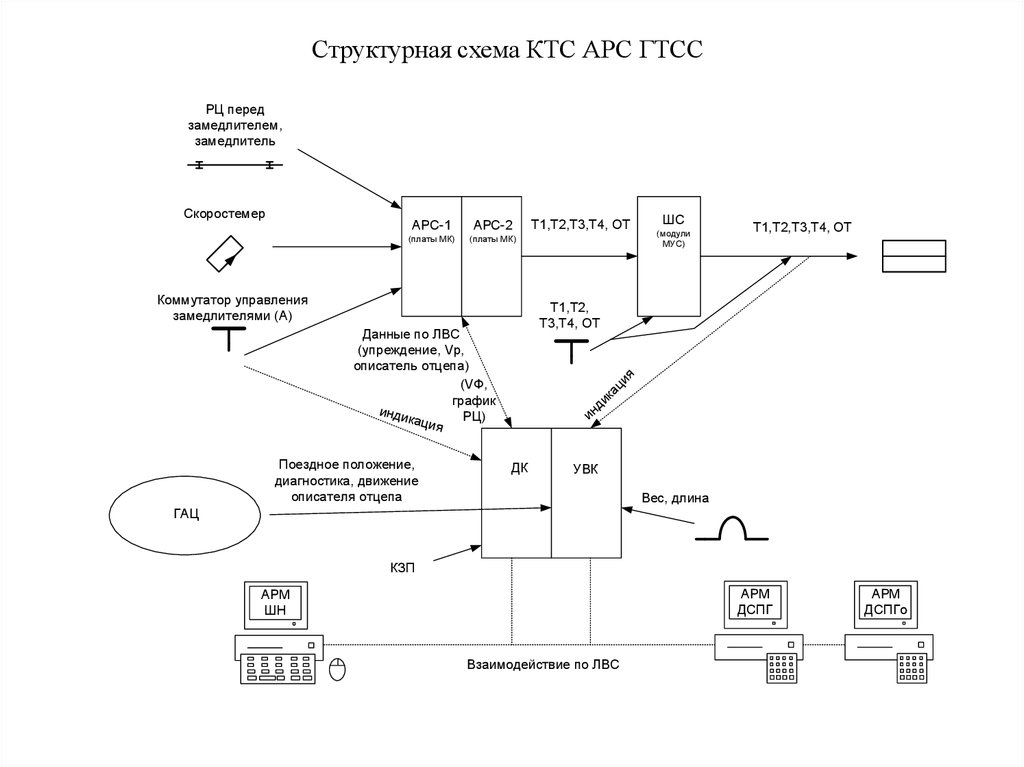
Структурная схема КТС АРС ГТССРЦ перед
замедлителем,
замедлитель
Скоростемер
АРС-1
АРС-2
(платы МК)
(платы МК)
Коммутатор управления
замедлителями (А)
ШС
(модули
МУС)
Т1,Т2,Т3,Т4, ОТ
Т1,Т2,
Т3,Т4, ОТ
ин
д
ик
ац
ия
Данные по ЛВС
(упреждение, Vр,
описатель отцепа)
(VФ,
график
инди
РЦ)
каци
я
Поездное положение,
диагностика, движение
описателя отцепа
Т1,Т2,Т3,Т4, ОТ
ДК
УВК
Вес, длина
ГАЦ
КЗП
АРМ
ДСПГ
АРМ
ШН
Взаимодействие по ЛВС
АРМ
ДСПГо
9.
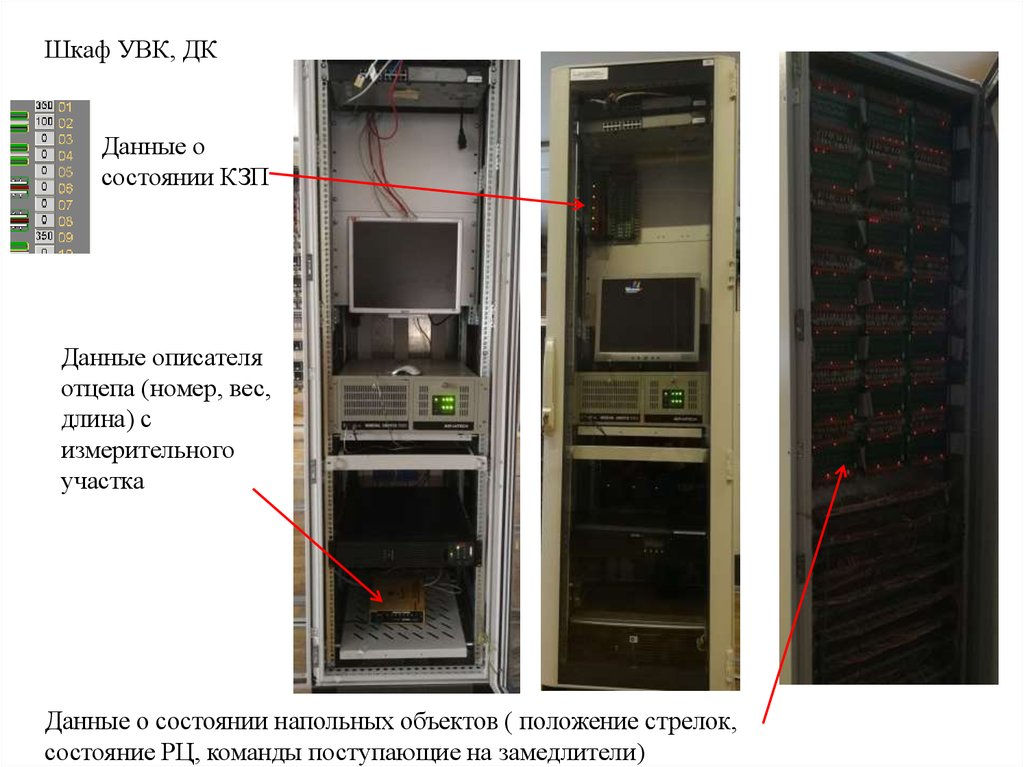
Шкаф УВК, ДКДанные о
состоянии КЗП
Данные описателя
отцепа (номер, вес,
длина) с
измерительного
участка
Данные о состоянии напольных объектов ( положение стрелок,
состояние РЦ, команды поступающие на замедлители)
10.
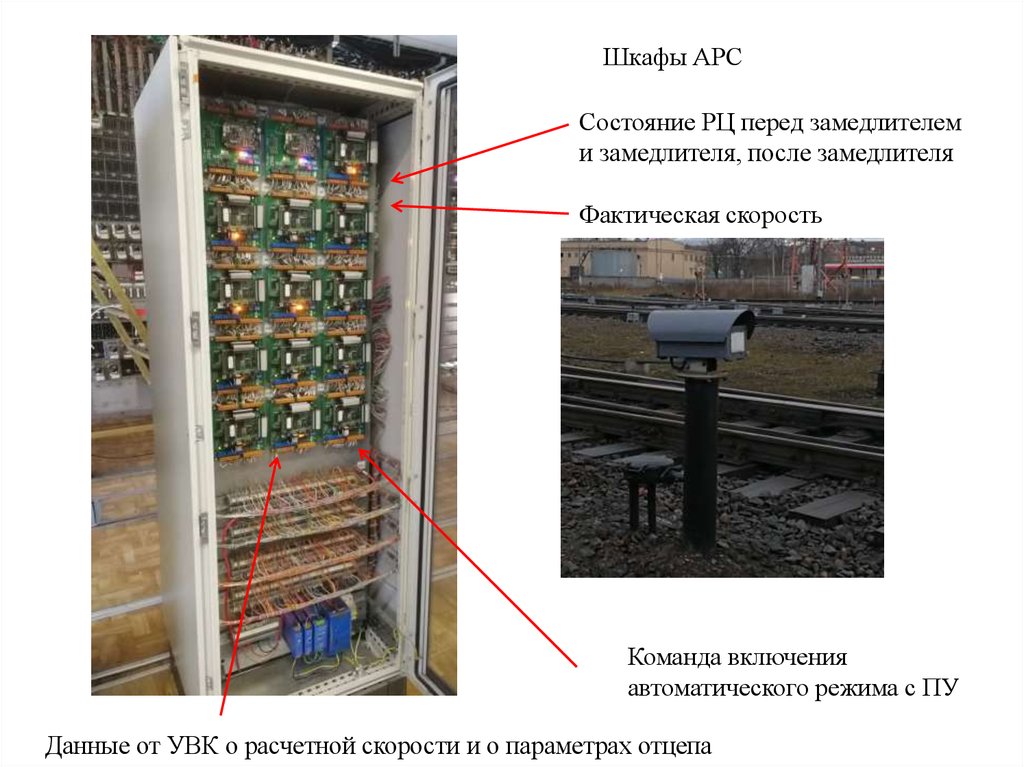
Шкафы АРССостояние РЦ перед замедлителем
и замедлителя, после замедлителя
Фактическая скорость
Команда включения
автоматического режима с ПУ
Данные от УВК о расчетной скорости и о параметрах отцепа
11.
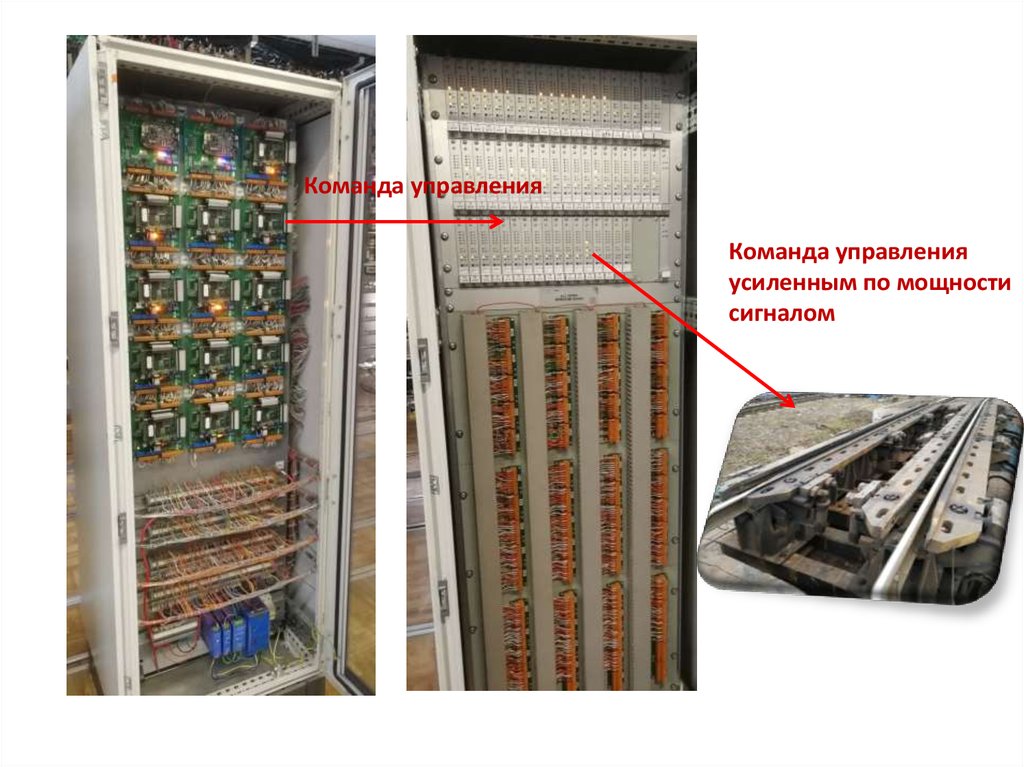
Команда управленияКоманда управления
усиленным по мощности
сигналом
12.
Светодиод опросаконтроллера и перемычка
перезапуска
Плата МК-АРС
Flash память
(алгоритмы торможения)
Контроллер платы
«TERN»
Светодиод
«Автоматика»
Микрореле
(команды управления)
Шлейф питания
контроллера
Светодиоды индикации занятости РЦ
Настроечные
переключатели
(настройка на место
установки и выбор
типа ТП)
13.
Стативы с контрольными реле14.
АРМ ДСПГКоммутаторы управления
замедлителями
Пульт выбора
режимов работы
Пульт выбора
индикации скорости
ТП
АРМ ДСПГо
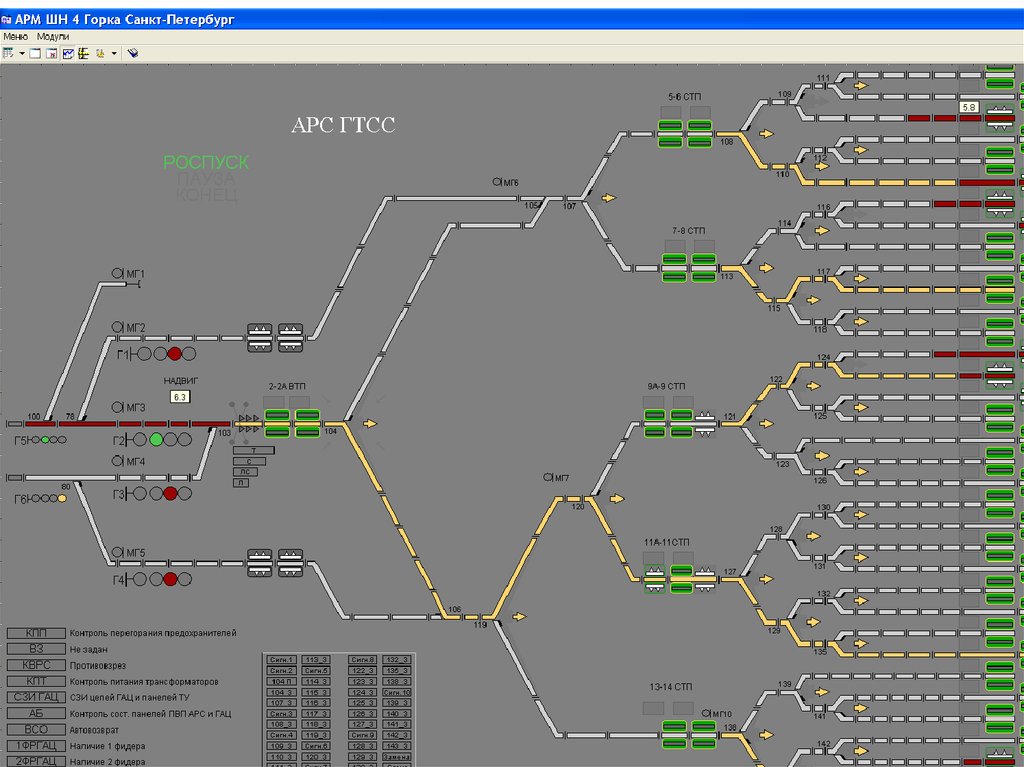
15.
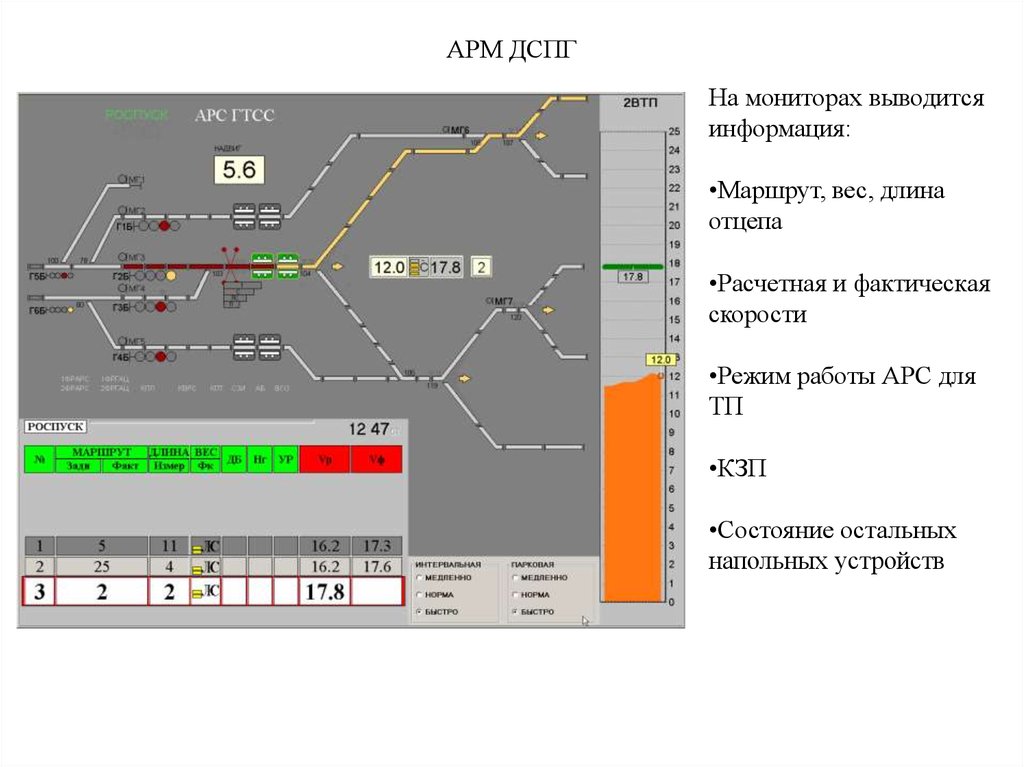
АРМ ДСПГНа мониторах выводится
информация:
•Маршрут, вес, длина
отцепа
•Расчетная и фактическая
скорости
•Режим работы АРС для
ТП
•КЗП
•Состояние остальных
напольных устройств
16.
17.
Команды торможенияЗанятие РЦ
Расчетная скорость
Фактическая скорость
Упреждение (скорость при
которой подается команда на
оттормаживание)
18.
4П310-918НТПК1 304В211-17
304В27-8
61
4П310-11
62
63
ГСМ
18НТПК1 (304-168)
ГМС
72
73
71
62
82
ДК-ХТ5-36
304В27-10
(304-176)
4П210-19
304В27-6
304В17-18
Т4
4П210-17
304В17-16
304В17-14
18НТПК
51
52
31
32
18НТПК
18НТПК
21
11
Р
304В17-20
4П210-15
22
18НТПК
12
18НТПК
41
42
АРС2-1ХТ3-61
АРС2-1ХТ3-63
304В111-13 ШС-ХТ38-9
Т3
304В111-19 ШС-ХТ38-19 АРС2-1ХТ3-64
4П110-11
304В111-15 ШС-ХТ38-7 АРС2-1ХТ3-62
Т2
ШС-ХТ38-5
4П210-13
304В211-1
Т1
304В111-17
4П310-3
ШС-ХТ38-3 АРС2-1ХТ3-60
АРС2-1ХТ3-58
18 ДПУ (241-156)
ДК
Р
Т4
Т3
Т2 18НТП ЗМ
Т1
А
АРС2
241Н32-10
61
ВП1
ВМ1
62
63
18 ЕПУ (241-158)
11
241Н32-12
12
13
18НТПК
ХТR-54
18НТПК1
304-176
304-126
1
3 НМШ1 1
3
1440
2 4
2
4
ЗП
1ХТ3-54
18 ДПУ
А
Т1
18 ЕПУ 1ХТ3-55
Т2
Т3
Т4 18НТП ЗМ 1ХТ3-59
304В112-19
Р
304В212-1
32
104
31
5А
22
304В14-12
108
5А
21
18НТП
ЗП
18НТП
ЗМ
9
ШС-ХТ38-8
ШС 18НТП ЗП
ШС-ХТ38-1
18НТП ЗМ
ХТ38-11
К
КонтТ
18НТП ЛТ ХТ38-2
Т1
Т2
Т3
Т4
Р
304В212-2
304В211-13
4П310-13
4П310-15
18НТП ЛР КонтОТ
ХТ38-4
ХТ38-16
Т1вых
304В211-9
Т2вых ХТ38-17304В211-2
Т3вых ХТ38-15304В211-5
Т4вых ХТ38-13
304В211-3
Рвых ХТ38-18
304В211-11
Б
4П210-11
304В27-2
БД 18НТП
304-126
П24
42
41
304В14-8
Т
К
1
2
304В112-6
3
4
304В112-8
12
32
52
72
13
33
53
73
304В112-12
22
42
304В112-14
62
82
304В112-16
23
43
304В112-18
63
83
304В112-20
1
18НТПК1
2
Т1
43
18НТПК1
32
31
304В14-6
Т2
33
304В112-10
3
18НТПК1
22
21
304В14-4
Т3
23
18НТПК1
12
А
304-135
11
304В14-2
Т4
4
5
6
13
18НТПК1
52
51
Р
7
304В14-10
304В27-16
ЗП
53
8
на лист 10
з
ДК-ХТ5-34
ДК-ХТ5-35
А
ДК-ХТ5-33
(304-126)
ДК-ХТ5-32
ДК-ХТ5-31
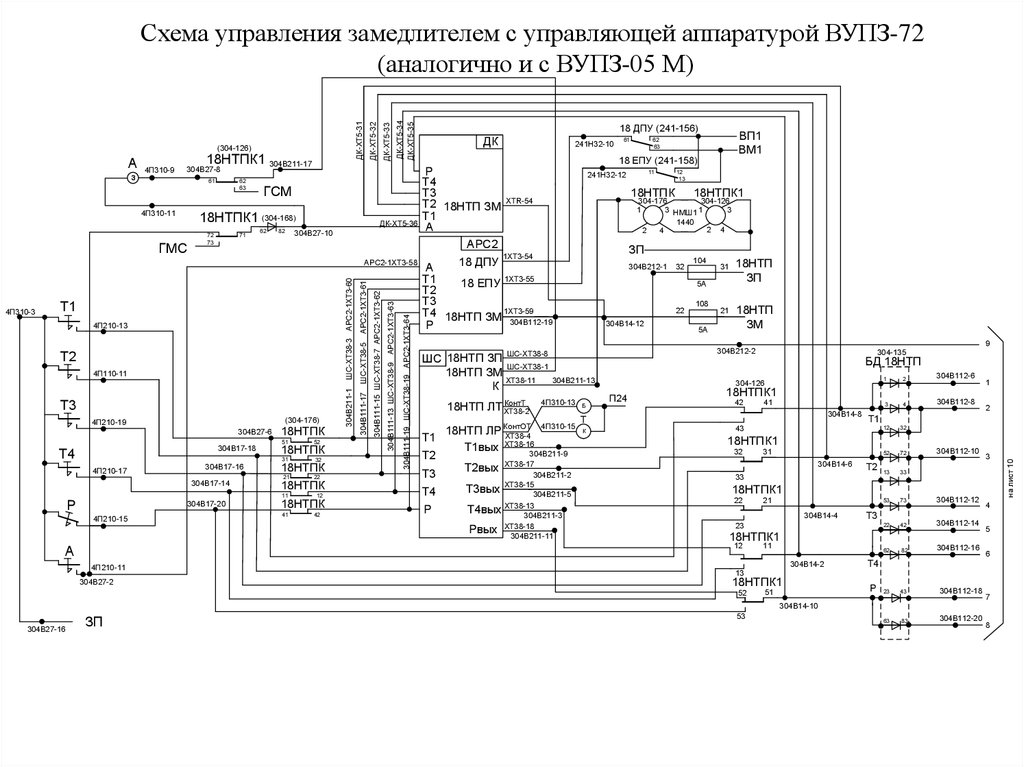
Схема управления замедлителем с управляющей аппаратурой ВУПЗ-72
(аналогично и с ВУПЗ-05 М)
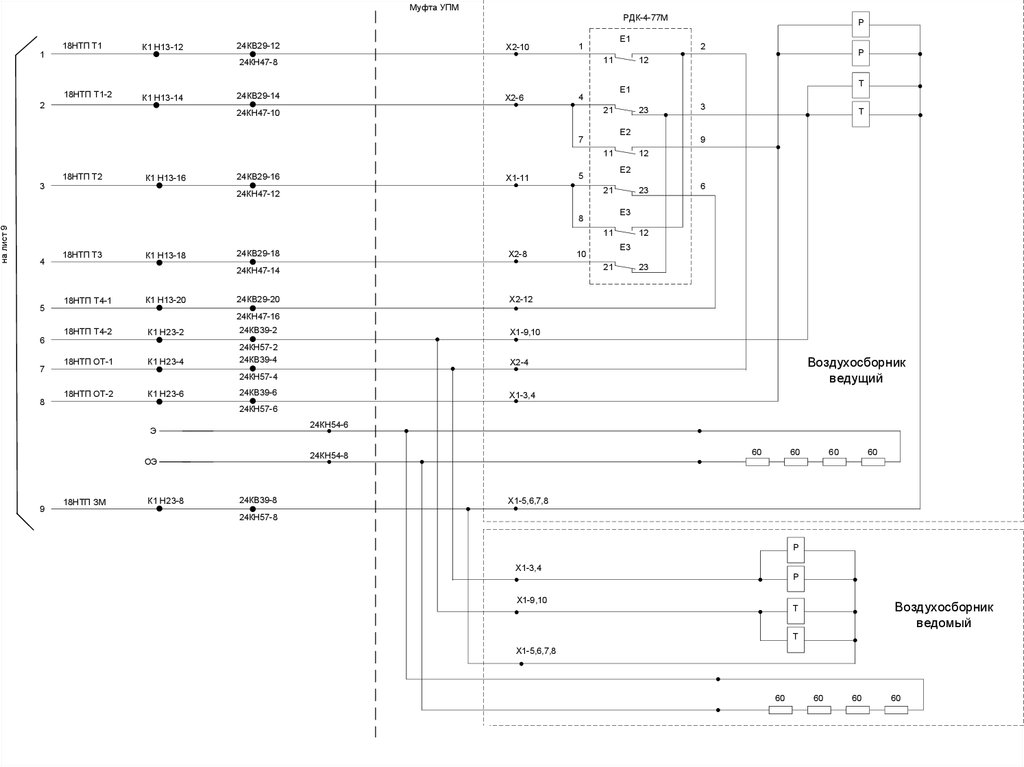
19.
Муфта УПМРДК-4-77М
18НТП Т1
1
К1 Н13-12
24КВ29-12
Х2-10
1
11
24КН47-8
18НТП Т1-2
2
К1 Н13-14
Е1
24КВ29-14
Х2-6
21
23
11
18НТП Т2
К1 Н13-16
Х1-11
24КВ29-16
на лист 9
К1 Н13-18
Х2-8
24КВ29-18
5
18НТП Т4-1
К1 Н13-20
6
Е3
12
Е3
10
21
24КН47-14
9
23
11
18НТП Т3
Т
12
21
8
4
3
Е2
5
24КН47-12
Р
Т
Е2
7
3
2
12
Е1
4
24КН47-10
Р
23
Х2-12
24КВ29-20
24КН47-16
18НТП Т4-2
6
7
18НТП ОТ-1
К1 Н23-2
24КВ39-2
Х1-9,10
К1 Н23-4
24КН57-2
24КВ39-4
Х2-4
18НТП ОТ-2
8
К1 Н23-6
24КВ39-6
Х1-3,4
24КН57-6
24КН54-6
Э
18НТП ЗМ
К1 Н23-8
60
24КН54-8
ОЭ
9
Воздухосборник
ведущий
24КН57-4
24КВ39-8
60
60
60
Х1-5,6,7,8
24КН57-8
Р
Х1-3,4
Р
Х1-9,10
Воздухосборник
ведомый
Т
Т
Х1-5,6,7,8
60
60
60
60
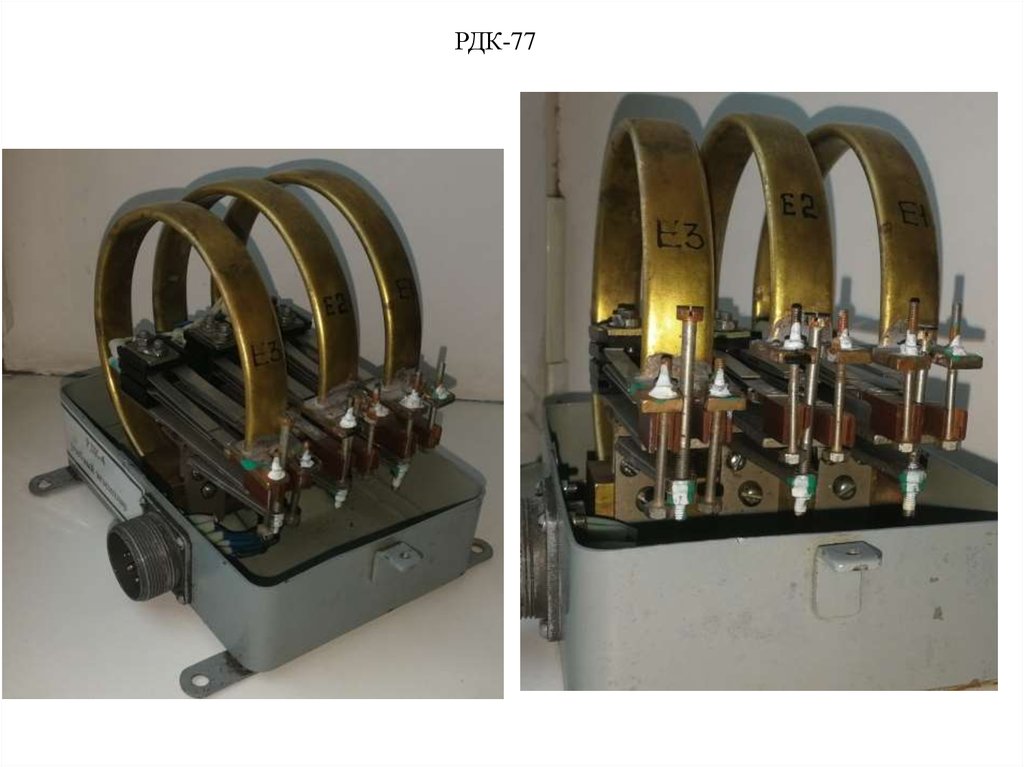
20.
РДК-7721.
22.
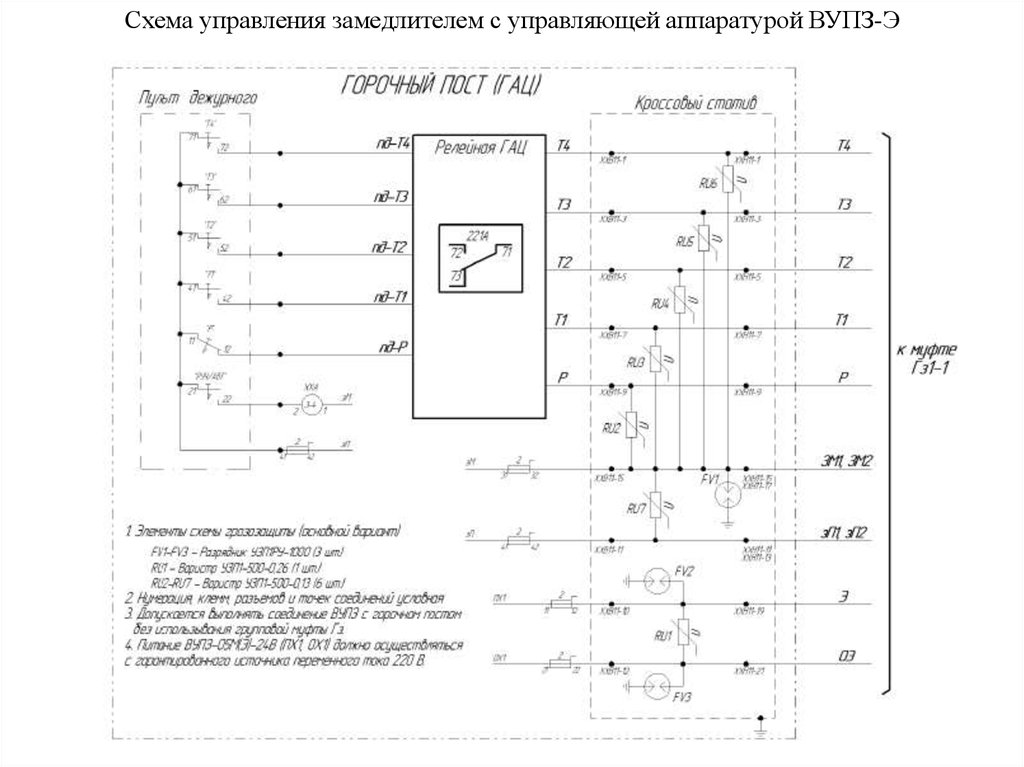
Схема управления замедлителем с управляющей аппаратурой ВУПЗ-Э23.
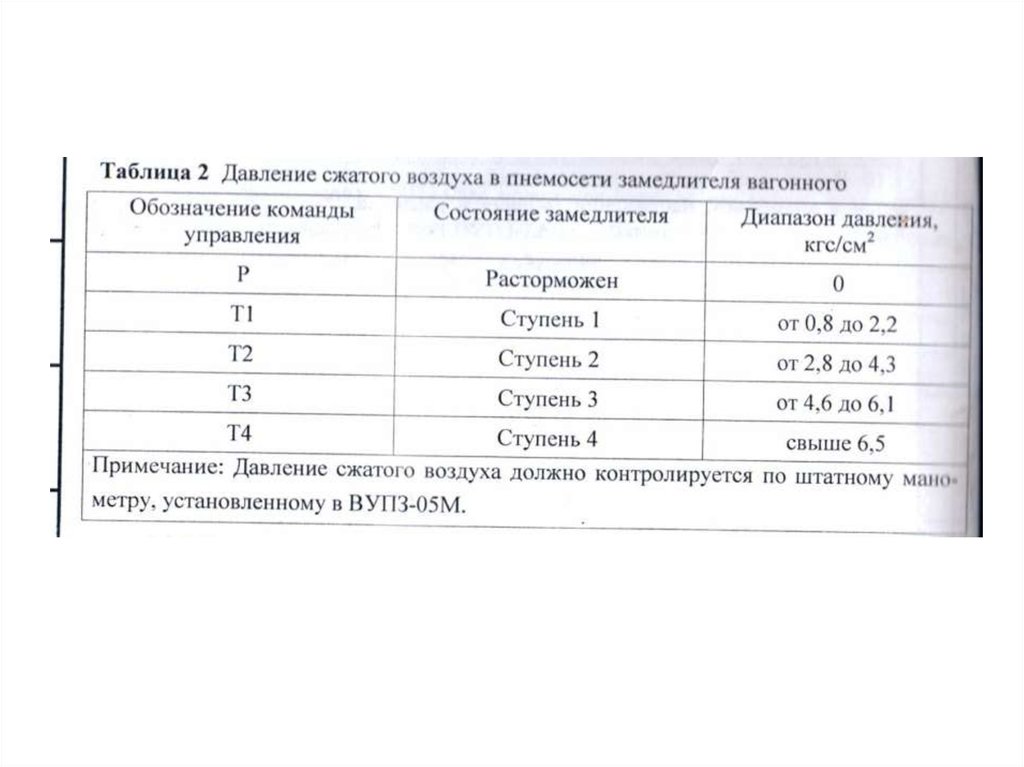
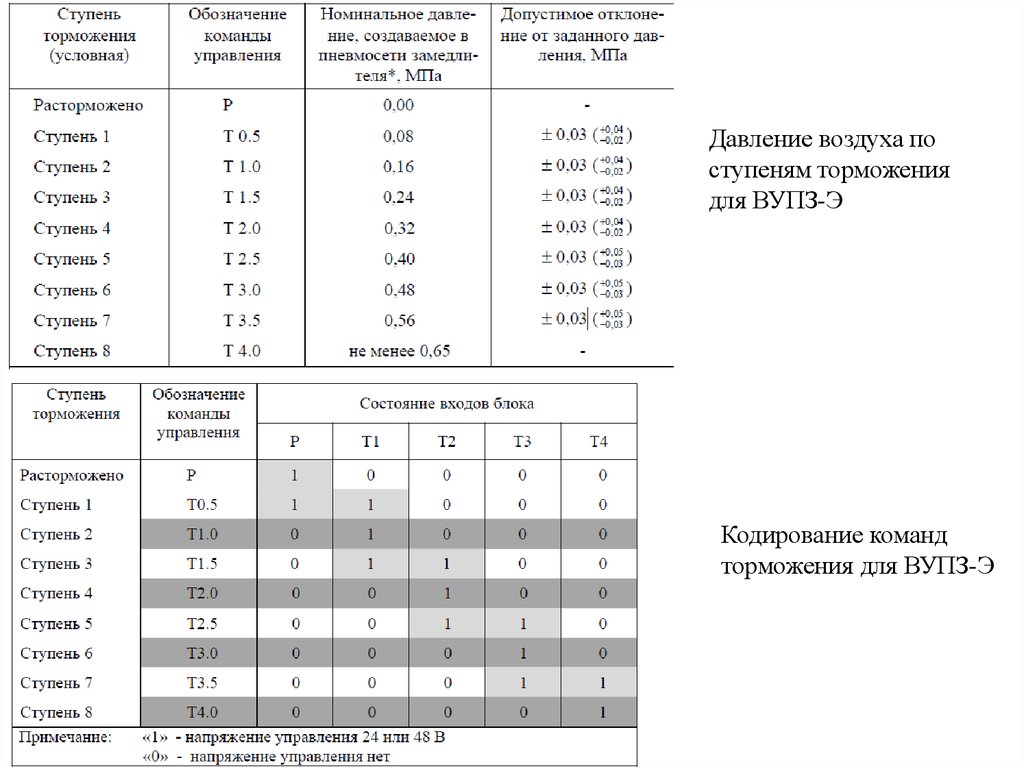
Давление воздуха поступеням торможения
для ВУПЗ-Э
Кодирование команд
торможения для ВУПЗ-Э
24.
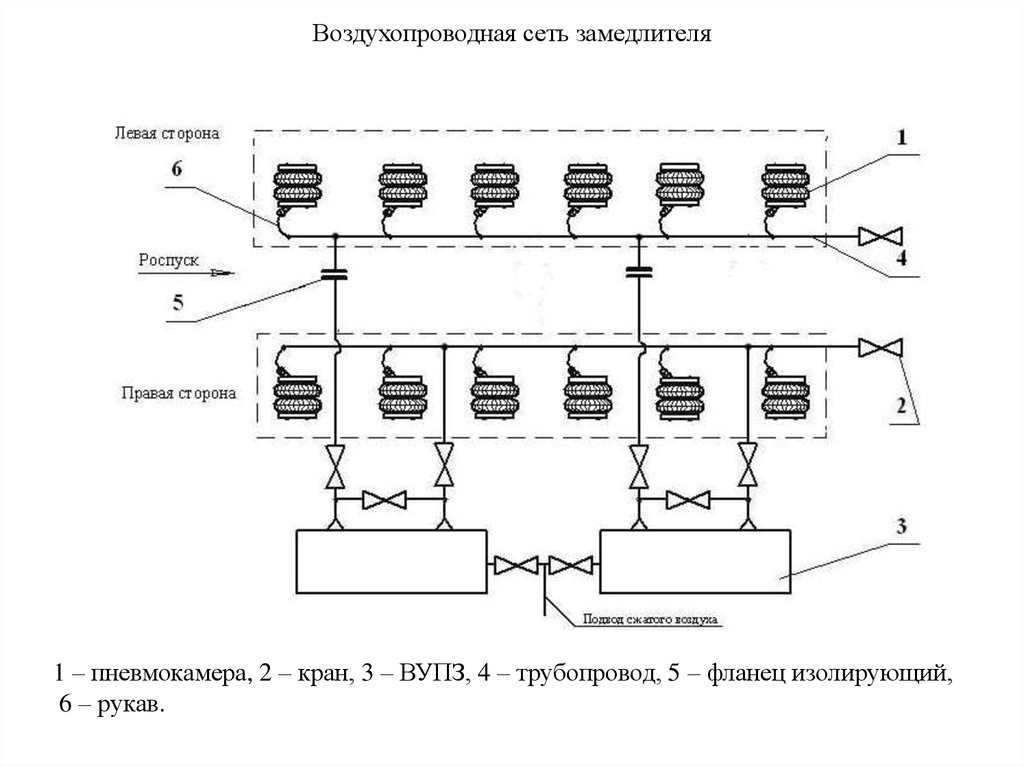
Воздухопроводная сеть замедлителя1 – пневмокамера, 2 – кран, 3 – ВУПЗ, 4 – трубопровод, 5 – фланец изолирующий,
6 – рукав.
25.
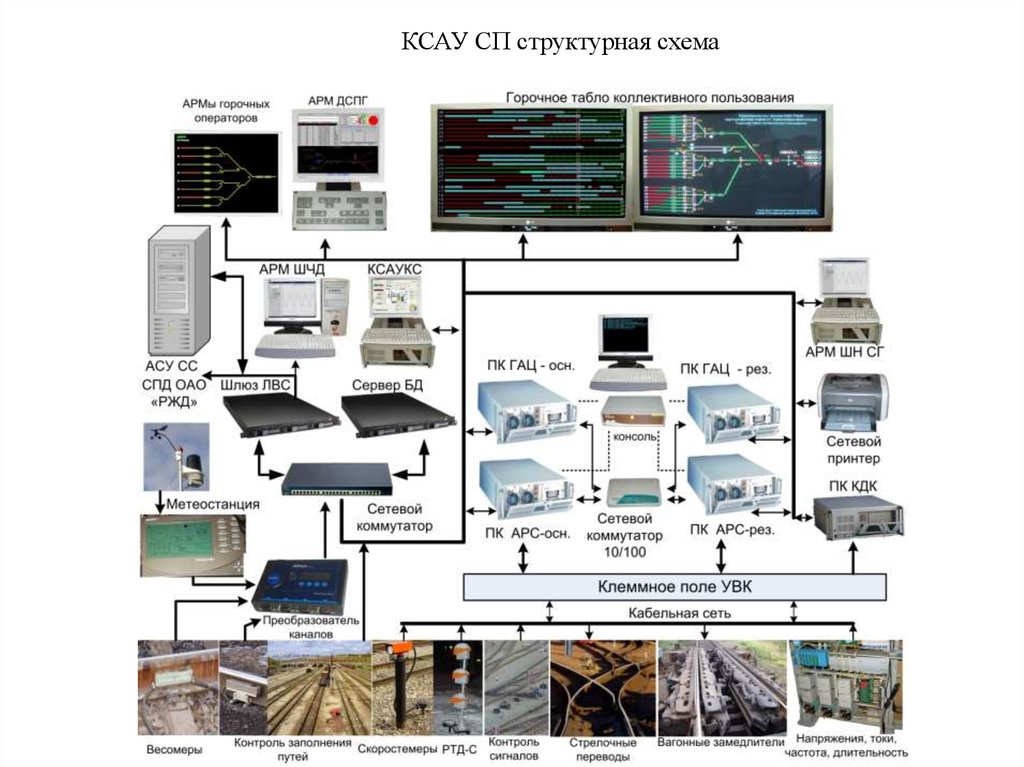
КСАУ СП структурная схема26.
АРС УУПТПодсистема АРС, решая задачи интервального (на 1ТП), интервально-прицельного (на 2 ТП) и
прицельного (на 3 ТП) регулирования скоростей скатывания отцепов, реализует следующие функции:
- ведет пространственно-временную модель взаимного расположения отцепов на спускной части горки,
используя КУ «Стрелка», КУ «ТП», ДСО, РЦ;
- выполняет расчеты и перерасчеты скоростей выхода из ТП, самоадаптируясь к изменениям внешних
условий (температура воздуха, скорость и направление ветра, осадки ид р.) и характеристик замедлителей
(мощность и время распада);
- рассчитывает интервал допустимых скоростей выхода отцепа из ТП, задаваемый нижней и верхней
границей, которые определяются технологическими ситуациями, возникающими в ходе роспуска;
- ведет постоянную модель состояния сортировочного парка с выдачей на АРМ-ы и табло коллективного
пользования информации о расположении отцепов на путях, наличии межвагонных промежутков («окон») и
текущем движении отцепов по каждому пути;
- производит постоянное измерение динамического профиля каждого пути сортировочного парка в зоне
действия подсистемы КЗП;
- обеспечивает резервный режим автоматического управления замедлителями по скорости, рассчитанной
по ДСО при отказе радиолокационных измерителей скорости;
- обеспечивает возможность ручного управления всеми ТП с центрального поста и поста резервного
управления 3 ТП (при его наличии);
- выдает звуковой и визуальный сигнал ДСПГ и операторам о необходимости перехода на ручной режим
управления замедлителями при отказах скоростемеров и ДСО;
- отображает состояние всех напольных устройств, положение стрелок, режимы работы замедлителей,
месторасположение отцепов и др.