







Similar presentations:

")
")







Доклад_диссертация Заброда
1.
Для служебного пользования(п. 44 перечня…)
Доклад основных положений диссертации на соискание
ученой степени кандидата технических наук
АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ БЕЗЭКИПАЖНЫМ КАТЕРОМ НА
ВОЗДУШНОЙ ПОДУШКЕ И МЕТОДИКА ОЦЕНКИ ЕЕ ЭФФЕКТИВНОСТИ
Адъюнкт штатной адъюнктуры
капитан 3 ранга
Заброда Максим Андреевич
6.2.1 – Вооружение и военная техника.
Научный руководитель – доктор технических наук, профессор Краснодубец Леонид Андреевич
2.
2Актуальность диссертационного исследования
Безэкипажные катера по
предназначению
Брандеры
Патрульные
Ударные
Вооружение
Пулеметная
турель
ЗРК,РСЗО
Беспилотные системы
термобарические
гранатометы,
ПТРК
БПЛА/FPV-дрон
ТНПА
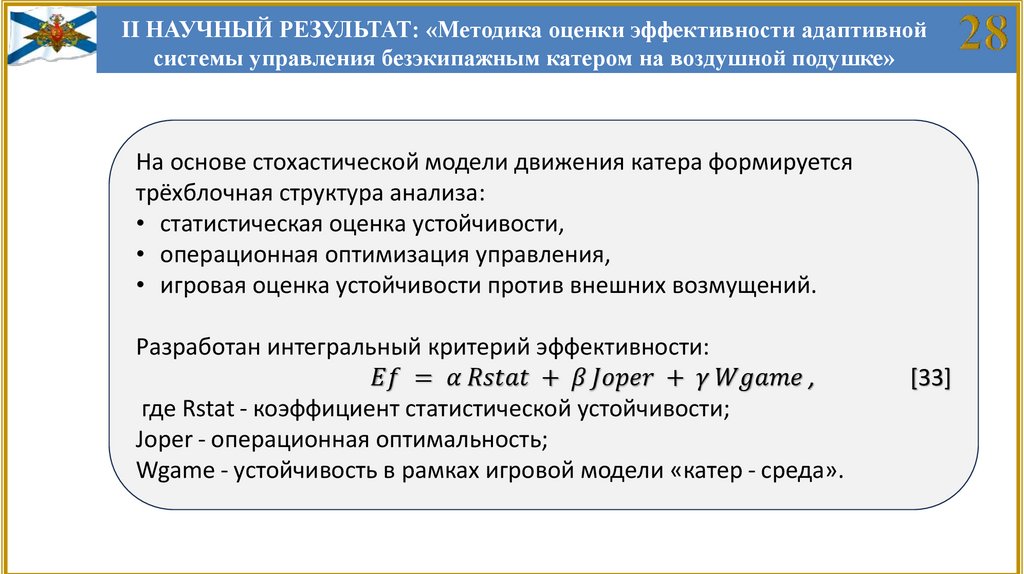
3.
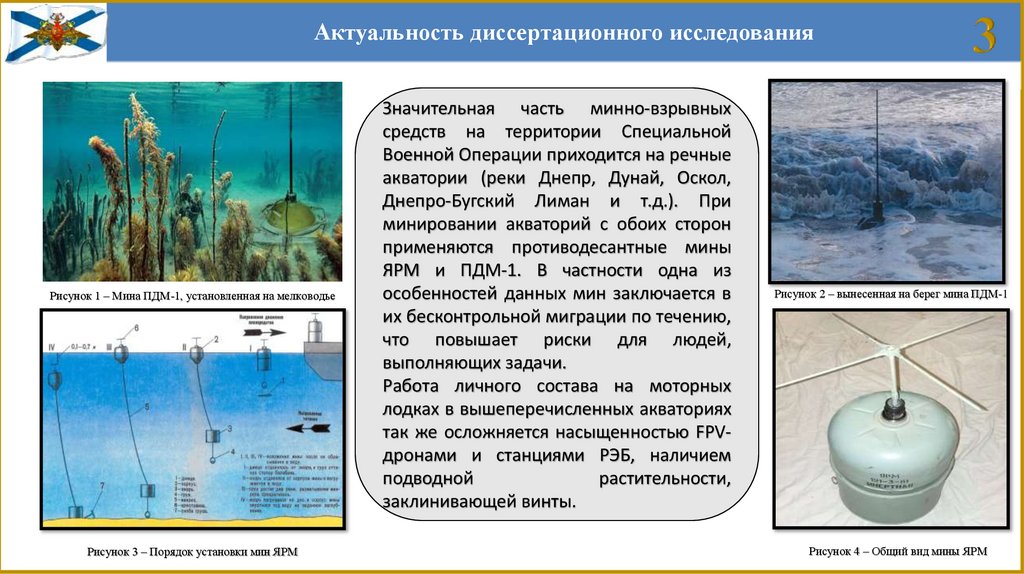
Актуальность диссертационного исследованияРисунок 1 – Мина ПДМ-1, установленная на мелководье
Рисунок 3 – Порядок установки мин ЯРМ
Значительная часть минно-взрывных
средств на территории Специальной
Военной Операции приходится на речные
акватории (реки Днепр, Дунай, Оскол,
Днепро-Бугский Лиман и т.д.). При
минировании акваторий с обоих сторон
применяются противодесантные мины
ЯРМ и ПДМ-1. В частности одна из
особенностей данных мин заключается в
их бесконтрольной миграции по течению,
что повышает риски для людей,
выполняющих задачи.
Работа личного состава на моторных
лодках в вышеперечисленных акваториях
так же осложняется насыщенностью FPVдронами и станциями РЭБ, наличием
подводной
растительности,
заклинивающей винты.
Рисунок 2 – вынесенная на берег мина ПДМ-1
Рисунок 4 – Общий вид мины ЯРМ
4.
Актуальность диссертационного исследованияРисунок 5 – Установка противодесантных мин при помощи ПТС
Установка мин производится:
1) С
использованием
плавающих
транспортеров
ПТС
в
отсутствии
соприкосновения с противником
2) Личным составом на моторных лодках
различного типа в условии риска
соприкосновения с противником
3) С помощью квадрокоптеров – в условии
соприкосновения с противником
Рисунок 6 – Разминирование мин ПДМ с помощью двух ПТС. г. Мариуполь
Разминирование производится:
1) С
использованием
двух
плавающих
транспортеров ПТС и трала между ними.
(чрезмерно опасный способ для личного
состава)
2) Квадрокоптером с пристегнутым тралом
(отсутствует точность геопозиционирования и
тщательность разминирования полос)
4
5.
Актуальность диссертационного исследованияРисунок 7 – Порядок установки якорных речных мин штатными плавательными средствами
5
Ввиду сложившегося противоречия между
широким спектром стоящих перед МРТК
задач в интересах действий сил ВМФ,
стремительностью изменения оперативной
обстановки на ТВД и отсутствием прототипов
безэкипажных катеров, способных выполнять
перечень задач в условиях мелководья,
болотистой местности, ледяной подложки,
выхода
на
побережье
(амфибийные
операции), а так же способных осуществлять
постановку мин в районах предполагаемых
минных полей и успешное их траление,
возникла необходимость создания нового
типа БЭК – на воздушной подушке и,
соответственно
адаптивной
системы
управления для них.
Влияние СВП на датчики целей якорных мин
было исследовано в ходе натурных
испытаний ДК пр.1206 «Кальмар» и также
описано в наставлении по эксплуатации LCAC
ВМС США
Рисунок 8 – Установка якорных речных мин перспективным безэкипажным катером на воздушной подушке
6.
Основные положения диссертационного исследования, выносимые на защитуАДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ БЕЗЭКИПАЖНЫМ КАТЕРОМ НА ВОЗДУШНОЙ ПОДУШКЕ И
МЕТОДИКА ОЦЕНКИ ЕЕ ЭФФЕКТИВНОСТИ
ОБЪЕКТ ИССЛЕДОВАНИЯ: Амфибийные робототехнические комплексы Военно-Морского Флота.
ПРЕДМЕТ ИССЛЕДОВАНИЯ: Система управления безэкипажным катером на воздушной подушке (соответствует
п.1 паспорта научной специальности 6.2.1. Методология обоснования системы вооружения, ее основных элементов и
закономерностей развития, места системы вооружения в структуре оборонного потенциала страны и решения
задач военного строительства. Методы моделирования и оценки эффективности систем вооружения, объектов
военного назначения, их свойств, структуры, состава и элементов с учетом тактико-экономических показателей.
Научно-методические основы прогнозирования и развития ВВСТ и определения приоритетных исследований по
созданию перспективных образцов, их составных частей и комплектующих изделий).
Цель исследования: Повышение эффективности применения безэкипажных катеров путем разработки адаптивной
системы управления безэкипажным катером на воздушной подушке и методики оценки ее эффективности,
позволяющего выполнять задачи в сложных условиях местности
Гипотеза исследования: Разработка адаптивной системы управления безэкипажным катером на воздушной подушке и
методики оценки ее эффективности позволит создавать новые типы безэкипажных катеров и применять их в условиях,
недоступных для стандартных водоизмещающих безэкипажных катеров, таких как мелководье, болотистая местность,
ледяная подложка, существенно расширяя спектр выполняемых задач и минимизируя потери личного состава.
7.
Основные положения научной квалификационной работы1.
2.
3.
4.
5.
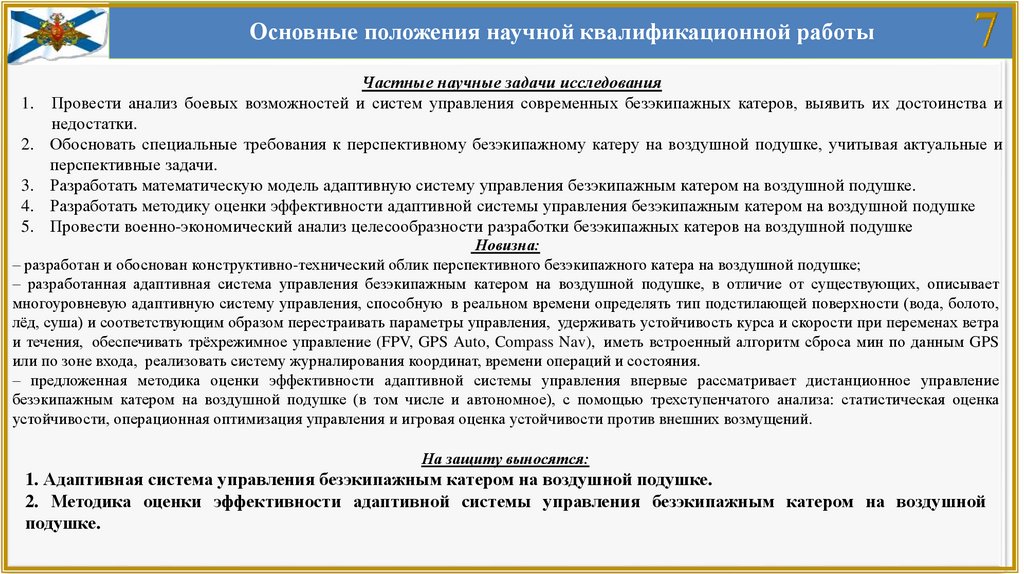
Частные научные задачи исследования
Провести анализ боевых возможностей и систем управления современных безэкипажных катеров, выявить их достоинства и
недостатки.
Обосновать специальные требования к перспективному безэкипажному катеру на воздушной подушке, учитывая актуальные и
перспективные задачи.
Разработать математическую модель адаптивную систему управления безэкипажным катером на воздушной подушке.
Разработать методику оценки эффективности адаптивной системы управления безэкипажным катером на воздушной подушке
Провести военно-экономический анализ целесообразности разработки безэкипажных катеров на воздушной подушке
Новизна:
– разработан и обоснован конструктивно-технический облик перспективного безэкипажного катера на воздушной подушке;
– разработанная адаптивная система управления безэкипажным катером на воздушной подушке, в отличие от существующих, описывает
многоуровневую адаптивную систему управления, способную в реальном времени определять тип подстилающей поверхности (вода, болото,
лёд, суша) и соответствующим образом перестраивать параметры управления, удерживать устойчивость курса и скорости при переменах ветра
и течения, обеспечивать трёхрежимное управление (FPV, GPS Auto, Compass Nav), иметь встроенный алгоритм сброса мин по данным GPS
или по зоне входа, реализовать систему журналирования координат, времени операций и состояния.
– предложенная методика оценки эффективности адаптивной системы управления впервые рассматривает дистанционное управление
безэкипажным катером на воздушной подушке (в том числе и автономное), с помощью трехступенчатого анализа: статистическая оценка
устойчивости, операционная оптимизация управления и игровая оценка устойчивости против внешних возмущений.
На защиту выносятся:
1. Адаптивная система управления безэкипажным катером на воздушной подушке.
2. Методика оценки эффективности адаптивной системы управления безэкипажным катером на воздушной
подушке.
8.
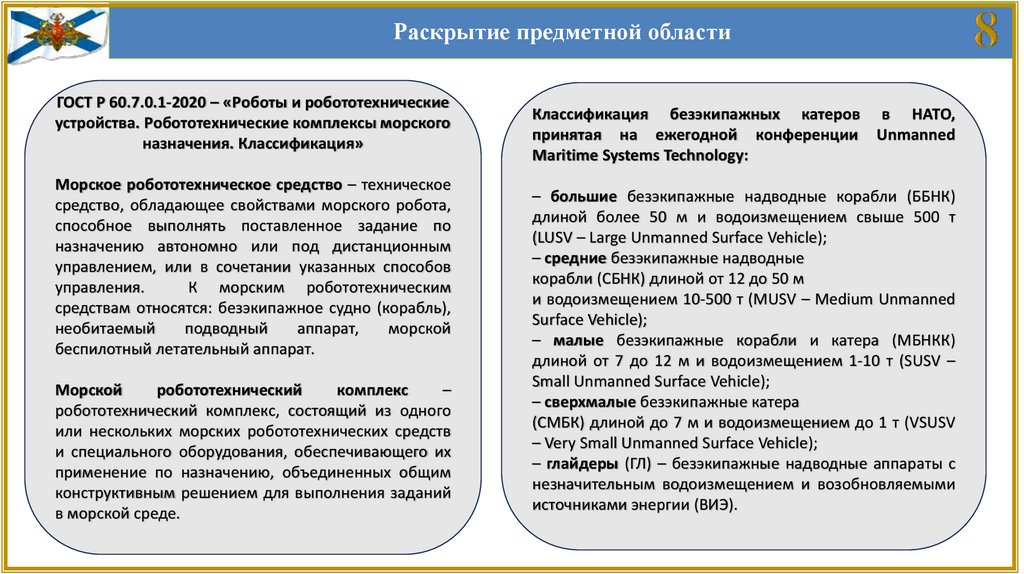
Раскрытие предметной областиГОСТ Р 60.7.0.1-2020 – «Роботы и робототехнические
устройства. Робототехнические комплексы морского
назначения. Классификация»
Морское робототехническое средство – техническое
средство, обладающее свойствами морского робота,
способное выполнять поставленное задание по
назначению автономно или под дистанционным
управлением, или в сочетании указанных способов
управления.
К морским робототехническим
средствам относятся: безэкипажное судно (корабль),
необитаемый
подводный
аппарат,
морской
беспилотный летательный аппарат.
Морской
робототехнический
комплекс
–
робототехнический комплекс, состоящий из одного
или нескольких морских робототехнических средств
и специального оборудования, обеспечивающего их
применение по назначению, объединенных общим
конструктивным решением для выполнения заданий
в морской среде.
Классификация безэкипажных катеров в НАТО,
принятая на ежегодной конференции Unmanned
Maritime Systems Technology:
– большие безэкипажные надводные корабли (ББНК)
длиной более 50 м и водоизмещением свыше 500 т
(LUSV – Large Unmanned Surface Vehicle);
– средние безэкипажные надводные
корабли (СБНК) длиной от 12 до 50 м
и водоизмещением 10-500 т (MUSV – Medium Unmanned
Surface Vehicle);
– малые безэкипажные корабли и катера (МБНКК)
длиной от 7 до 12 м и водоизмещением 1-10 т (SUSV –
Small Unmanned Surface Vehicle);
– сверхмалые безэкипажные катера
(СМБК) длиной до 7 м и водоизмещением до 1 т (VSUSV
– Very Small Unmanned Surface Vehicle);
– глайдеры (ГЛ) – безэкипажные надводные аппараты с
незначительным водоизмещением и возобновляемыми
источниками энергии (ВИЭ).
9.
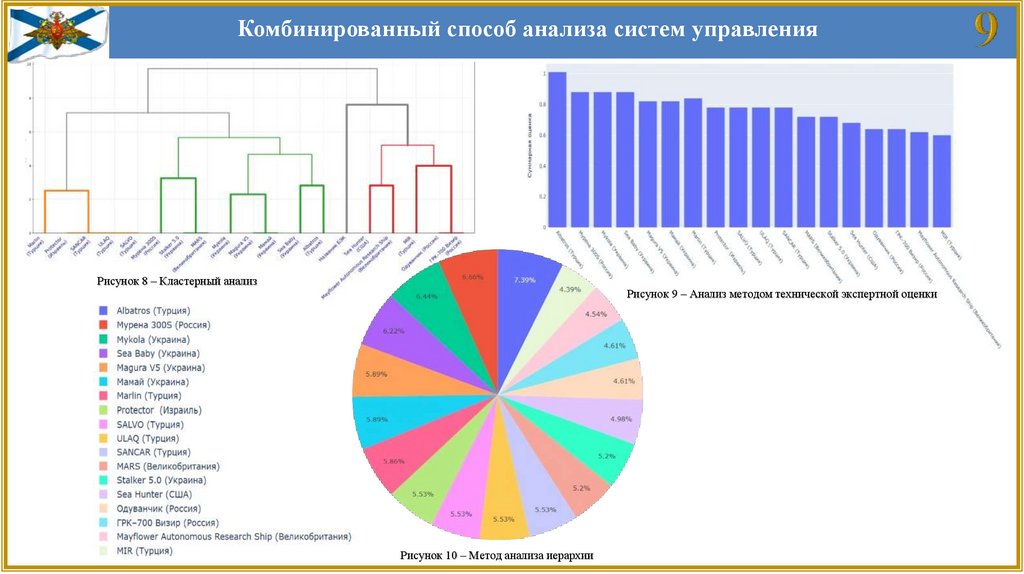
Комбинированный способ анализа систем управленияРисунок 8 – Кластерный анализ
Рисунок 9 – Анализ методом технической экспертной оценки
Рисунок 10 – Метод анализа иерархии
10.
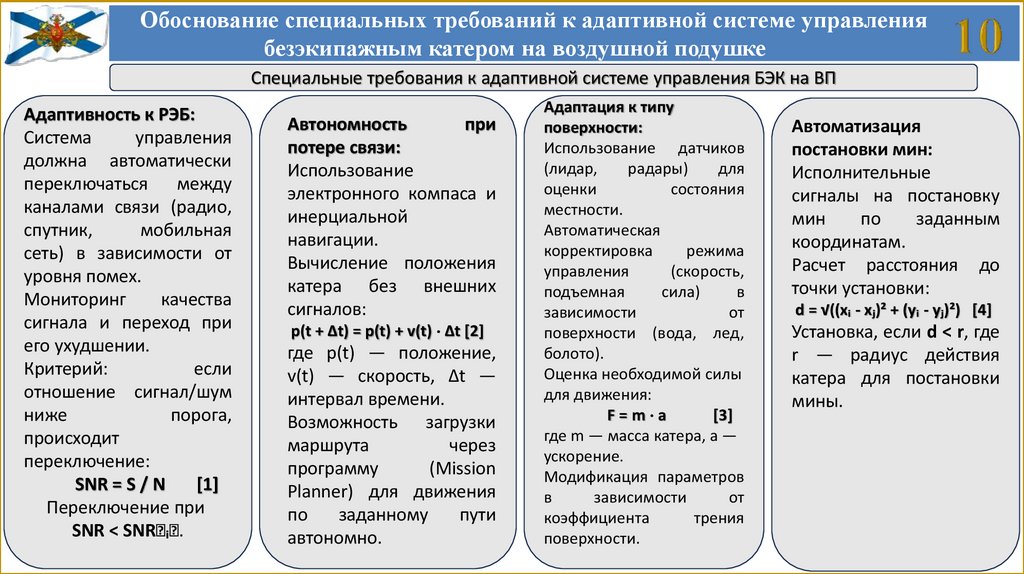
Обоснование специальных требований к адаптивной системе управлениябезэкипажным катером на воздушной подушке
Специальные требования к адаптивной системе управления БЭК на ВП
Адаптивность к РЭБ:
Система
управления
должна автоматически
переключаться между
каналами связи (радио,
спутник,
мобильная
сеть) в зависимости от
уровня помех.
Мониторинг
качества
сигнала и переход при
его ухудшении.
Критерий:
если
отношение сигнал/шум
ниже
порога,
происходит
переключение:
SNR = S / N
[1]
Переключение при
SNR < SNRₘᵢₘ.
Автономность
при
потере связи:
Использование
электронного компаса и
инерциальной
навигации.
Вычисление положения
катера без внешних
сигналов:
p(t + Δt) = p(t) + v(t) ⋅ Δt [2]
где p(t) — положение,
v(t) — скорость, Δt —
интервал времени.
Возможность загрузки
маршрута
через
программу
(Mission
Planner) для движения
по
заданному
пути
автономно.
Адаптация к типу
поверхности:
Использование датчиков
(лидар,
радары)
для
оценки
состояния
местности.
Автоматическая
корректировка
режима
управления
(скорость,
подъемная
сила)
в
зависимости
от
поверхности (вода, лед,
болото).
Оценка необходимой силы
для движения:
F=m⋅a
[3]
где m — масса катера, a —
ускорение.
Модификация параметров
в
зависимости
от
коэффициента
трения
поверхности.
Автоматизация
постановки мин:
Исполнительные
сигналы на постановку
мин
по
заданным
координатам.
Расчет расстояния до
точки установки:
d = √((xᵢ - xⱼ)² + (yᵢ - yⱼ)²) [4]
Установка, если d < r, где
r — радиус действия
катера для постановки
мины.
11.
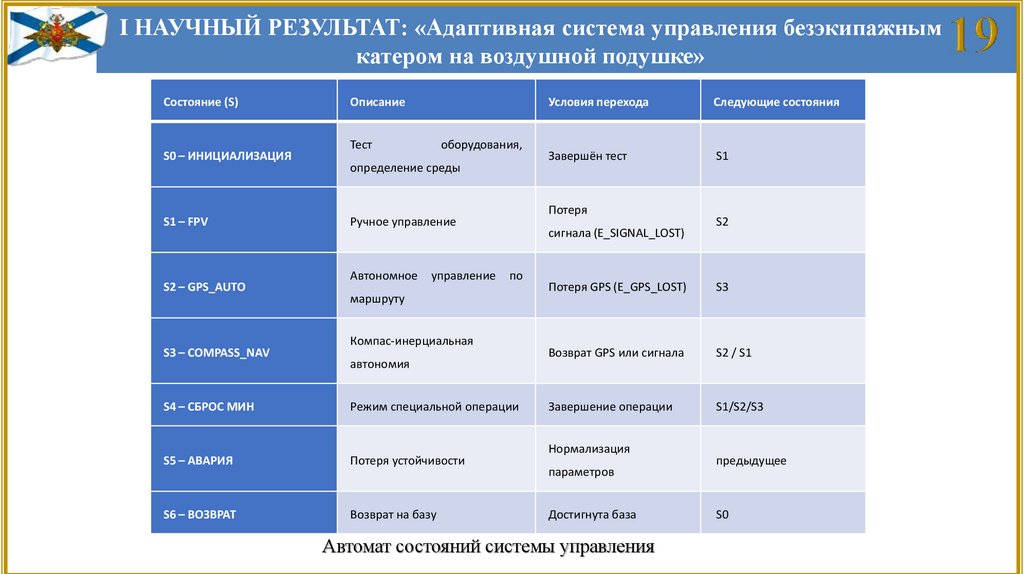
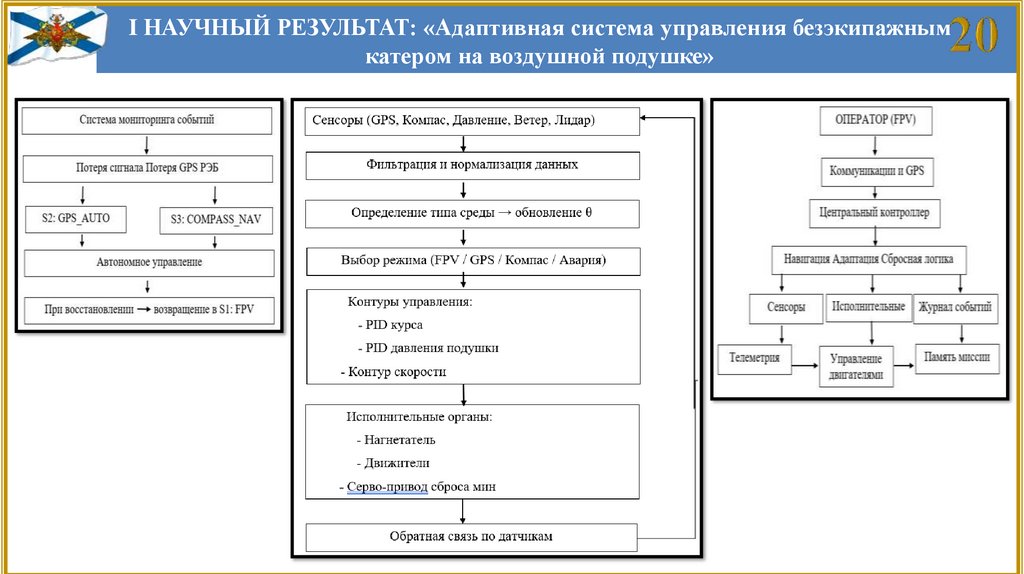
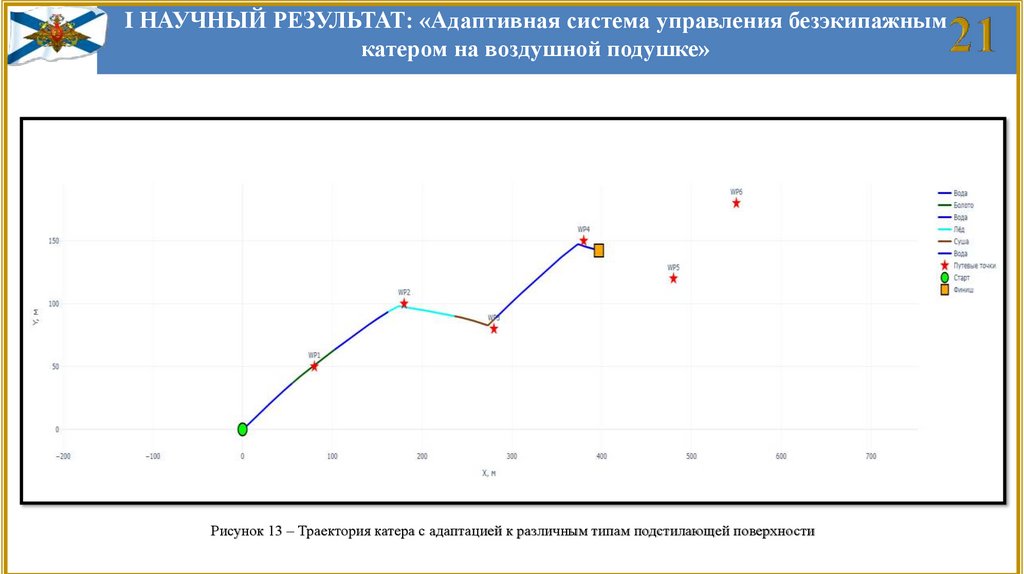
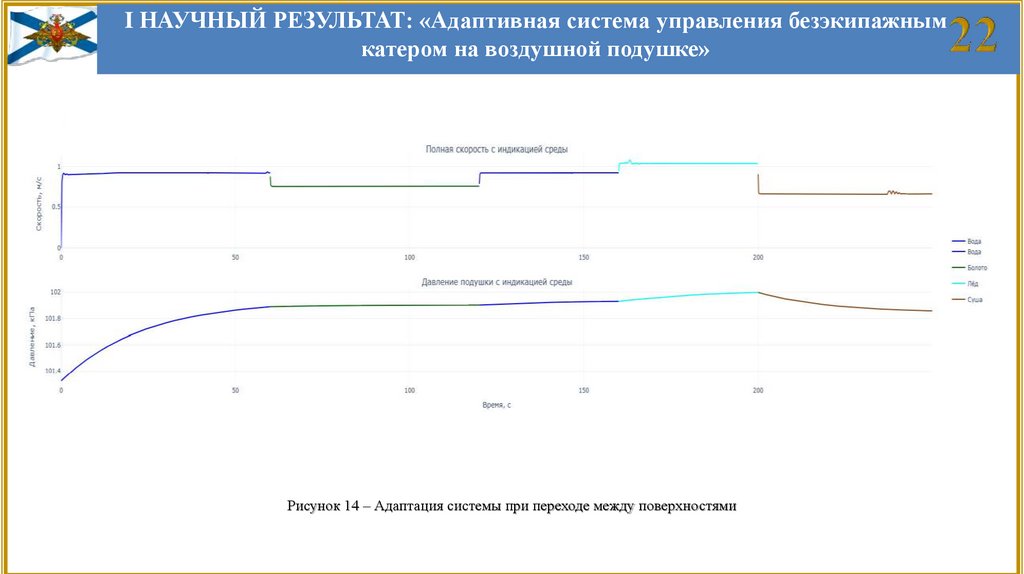
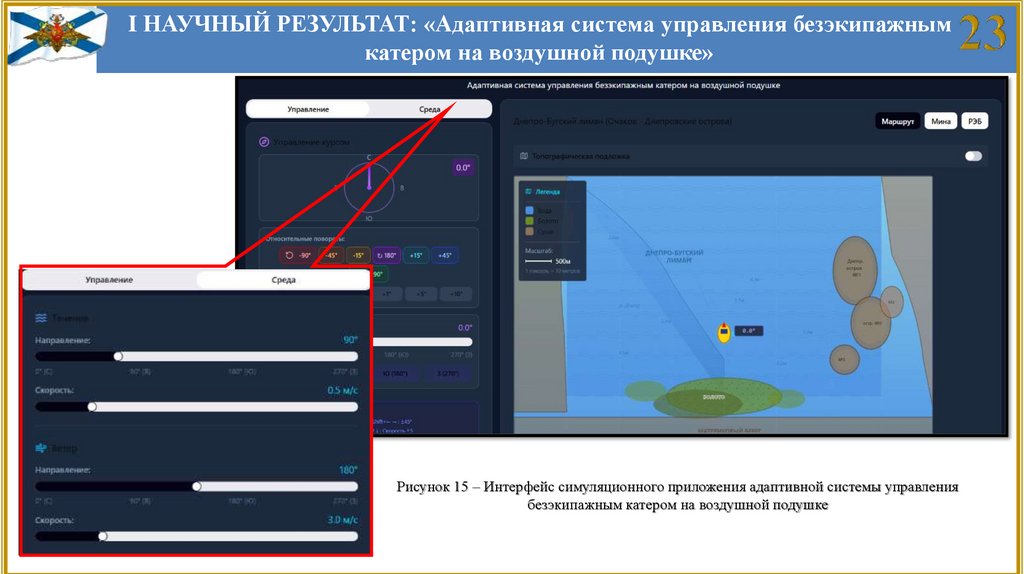
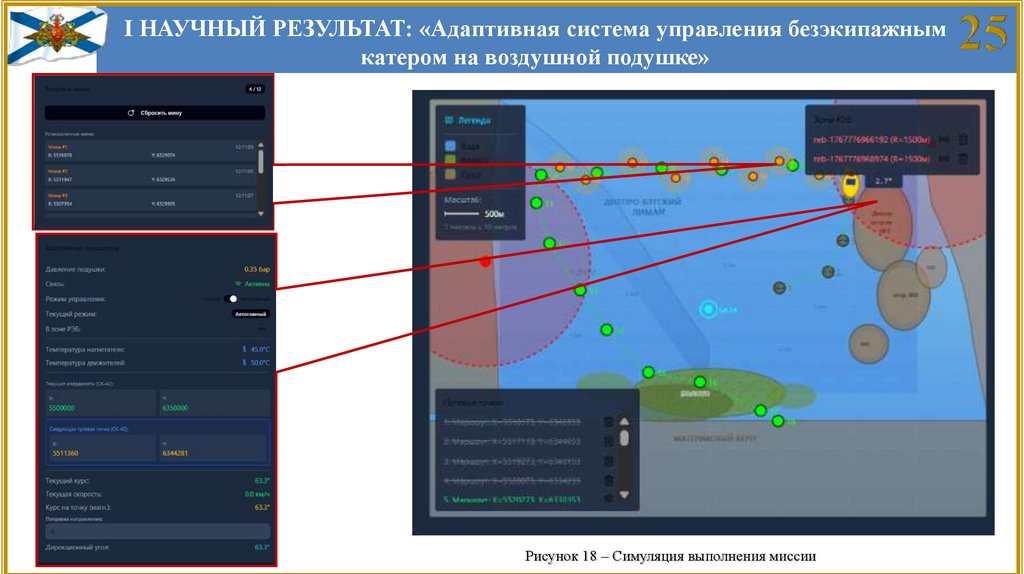
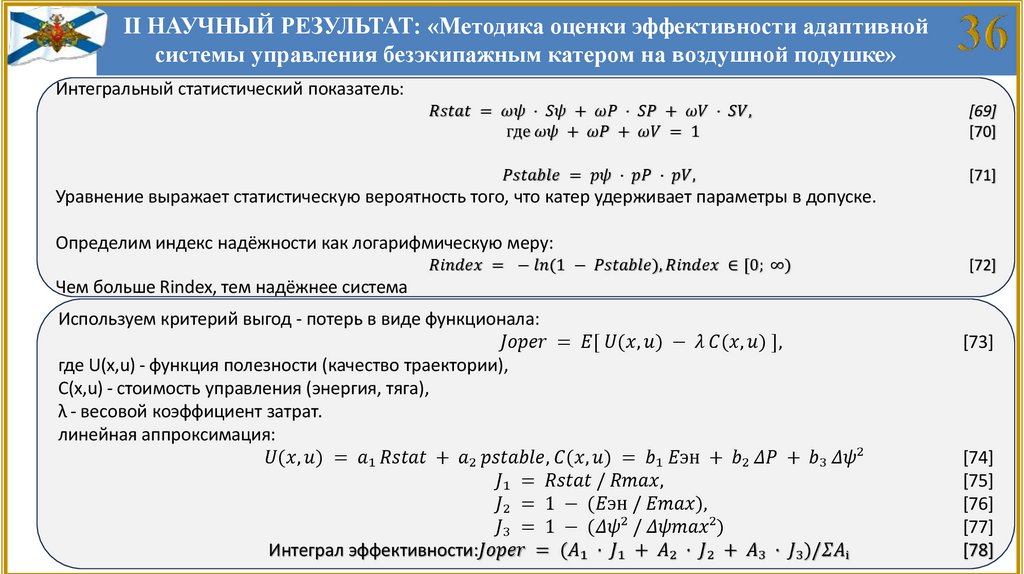
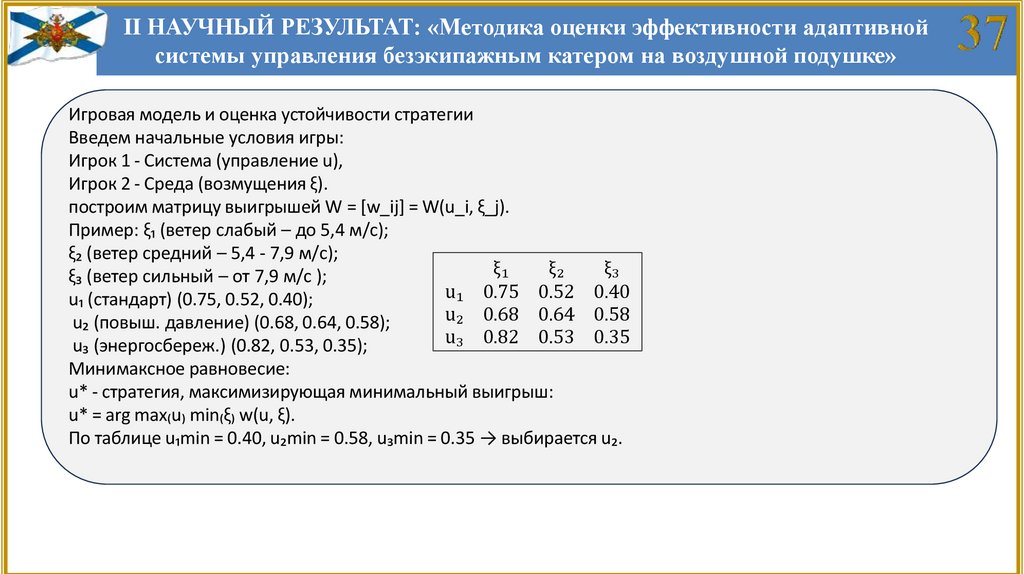
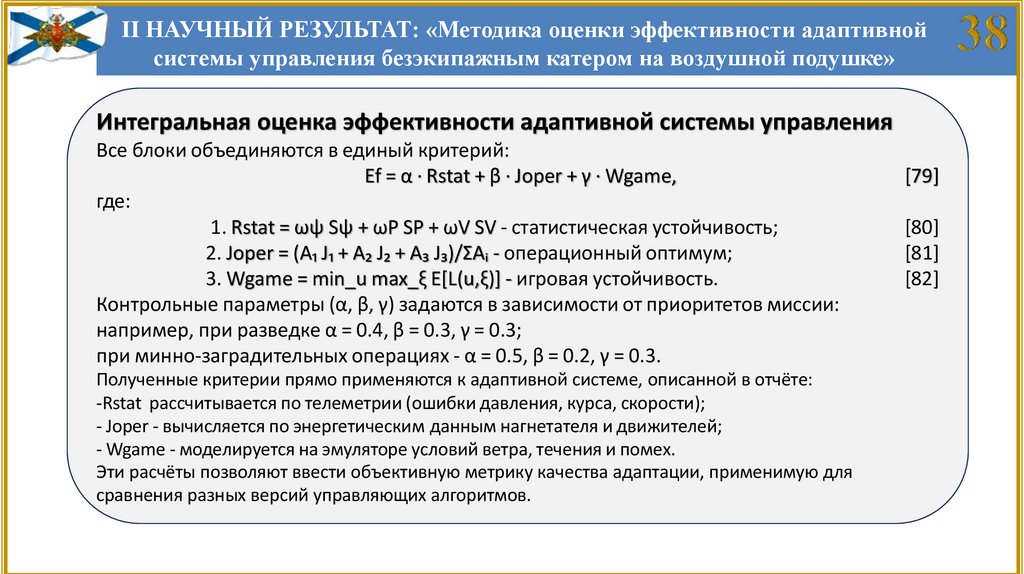
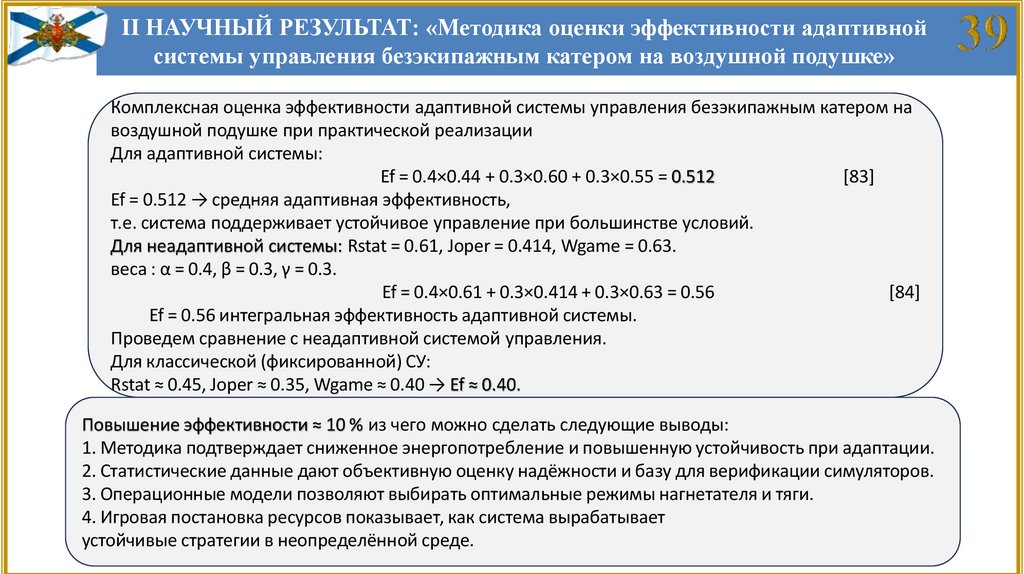
.I НАУЧНЫЙ РЕЗУЛЬТАТ: «Адаптивная система управления безэкипажным
катером на воздушной подушке»
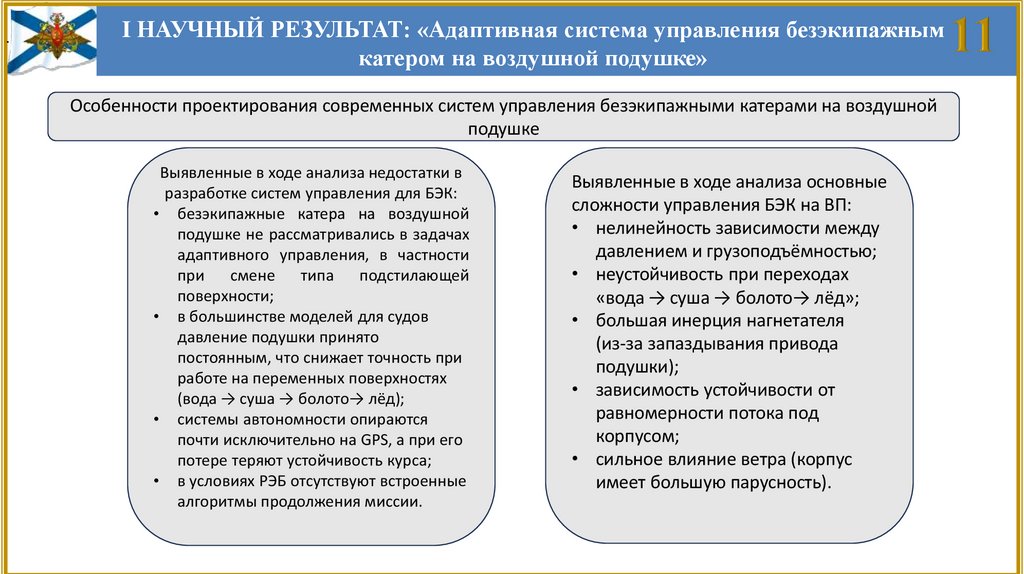
Особенности проектирования современных систем управления безэкипажными катерами на воздушной
подушке
Выявленные в ходе анализа недостатки в
разработке систем управления для БЭК:
• безэкипажные катера на воздушной
подушке не рассматривались в задачах
адаптивного управления, в частности
при смене типа подстилающей
поверхности;
• в большинстве моделей для судов
давление подушки принято
постоянным, что снижает точность при
работе на переменных поверхностях
(вода → суша → болото→ лёд);
• системы автономности опираются
почти исключительно на GPS, а при его
потере теряют устойчивость курса;
• в условиях РЭБ отсутствуют встроенные
алгоритмы продолжения миссии.
Выявленные в ходе анализа основные
сложности управления БЭК на ВП:
• нелинейность зависимости между
давлением и грузоподъёмностью;
• неустойчивость при переходах
«вода → суша → болото→ лёд»;
• большая инерция нагнетателя
(из-за запаздывания привода
подушки);
• зависимость устойчивости от
равномерности потока под
корпусом;
• сильное влияние ветра (корпус
имеет большую парусность).
12.
I НАУЧНЫЙ РЕЗУЛЬТАТ: «Адаптивная система управления безэкипажнымкатером на воздушной подушке»
Подход
Сущность
Преимуществ
Недостатки
Проблема
Возможное решение
Смена типа
Определение типа подложки по
поверхности → разные
датчикам + плавная адаптация
силы сопротивления
коэффициентов
Потеря сигнала
Автоматический переход на
управления
GPS-режим и маршрут миссии
Потеря GPS и связь
Компас-инерциальный алгоритм с
заблокирована
прогнозом координат
Перегрузки и крены
Аварийная стабилизация и
а
Классичес
Регуляторы
Простота,
Нет
кий ПИД
по ошибке
стабильность
адаптации,
требует
ручной
настройки
Нечеткая
Правила
Работа при
Нужна база
логика
вида
неопределённ
правил
IF–THEN
ости
Модели
Фильтрация
Хорошее
Зависят от
Калмана +
и
подавление
параметров
PID
стабилизаци
шумов
шума
я
Многореж
Переключен
Устойчивость
Нужна
имные
ие по
в разных
чёткая
автоматы
условиям
средах
логика
переходов
Вывод: В условиях движения
безэкипажного катера на
реке, где важны надёжность и
быстродействие,
оптимальным
будет
являться гибрид
«автомат
состояний +
адаптивные PID-контуры».
Такой подход совмещает
устойчивость классического
управления и способность
подстраиваться
под
изменения среды.
регулирование давления
Работа при ветре и
Компенсирующие поправки в
течении
контуре тяги и курса
Энергопотребление
Оптимизация Nнагн (мощности
нагнетателя) и Tдвиж (тяги движителя)
по критерию энергопотерь.
13.
I НАУЧНЫЙ РЕЗУЛЬТАТ: «Адаптивная система управления безэкипажнымкатером на воздушной подушке»
Исходные данные для моделирования
Рисунок 10 – Катер на воздушной подушке Змей-3
Рисунок 11 – БЭК на базе катера Змей-3 в ходе опытных
испытаний в зоне СВО (н.п. Голая Пристань, октябрь 2025 г.)
Рисунок 12 – Выход БЭК на базе катера Змей-3 на боевое
минирование якорными речными минами в зоне СВО
( н.п. Забарино, ноябрь 2025 г.)
В качестве образца для разработки адаптивной системы управления безэкипажным
катером на воздушной подушке был выбран спасательный катер «Змей-3», наиболее
отвечающий требованиям под выполняемые задачи.
14.
I НАУЧНЫЙ РЕЗУЛЬТАТ: «Адаптивная система управления безэкипажнымкатером на воздушной подушке»
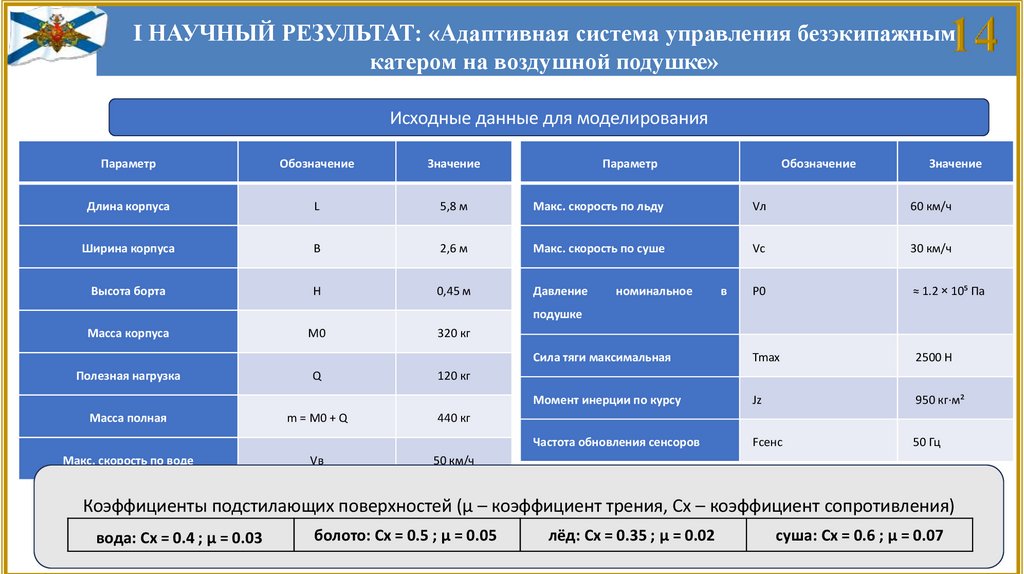
Исходные данные для моделирования
Параметр
Обозначение
Значение
Параметр
Длина корпуса
L
5,8 м
Макс. скорость по льду
Vл
60 км/ч
Ширина корпуса
B
2,6 м
Макс. скорость по суше
Vс
30 км/ч
Высота борта
H
0,45 м
Давление
P0
≈ 1.2 × 10⁵ Па
Сила тяги максимальная
Tmax
2500 Н
Момент инерции по курсу
Jz
950 кг·м²
Частота обновления сенсоров
Fсенс
50 Гц
номинальное
Обозначение
в
Значение
подушке
Масса корпуса
Полезная нагрузка
Масса полная
Макс. скорость по воде
M0
Q
m = M0 + Q
Vв
320 кг
120 кг
440 кг
50 км/ч
Коэффициенты подстилающих поверхностей (μ – коэффициент трения, Cx – коэффициент сопротивления)
вода: Cx = 0.4 ; μ = 0.03
болото: Cx = 0.5 ; μ = 0.05
лёд: Cx = 0.35 ; μ = 0.02
суша: Cx = 0.6 ; μ = 0.07
15.
I НАУЧНЫЙ РЕЗУЛЬТАТ: «Адаптивная система управления безэкипажнымкатером на воздушной подушке»
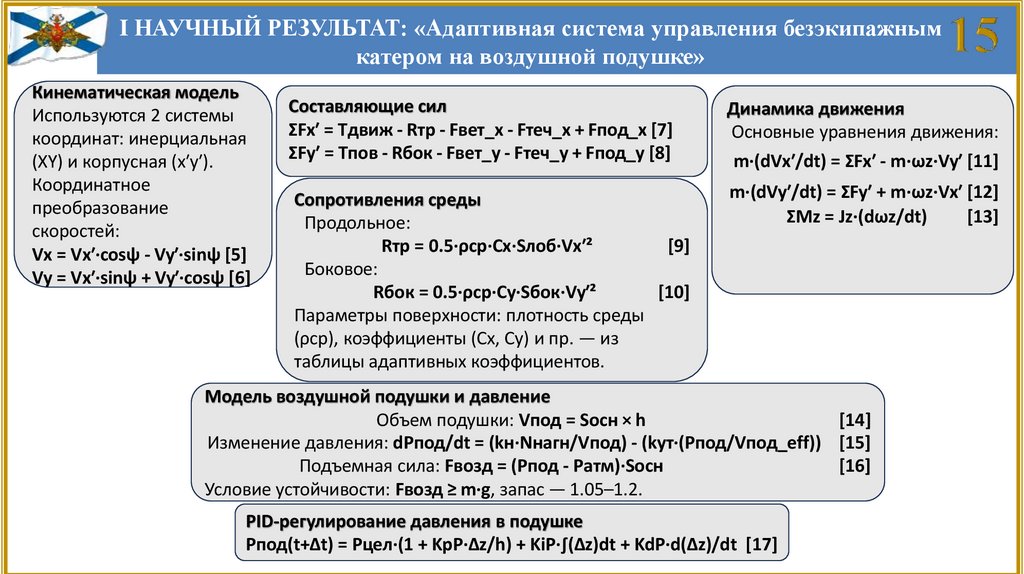
Кинематическая модель
Используются 2 системы
координат: инерциальная
(XY) и корпусная (x′y′).
Координатное
преобразование
скоростей:
Vx = Vx′·cosψ - Vy′·sinψ [5]
Vy = Vx′·sinψ + Vy′·cosψ [6]
Составляющие сил
ΣFx′ = Tдвиж - Rтр - Fвет_x - Fтеч_x + Fпод_x [7]
ΣFy′ = Tпов - Rбок - Fвет_y - Fтеч_y + Fпод_y [8]
Динамика движения
Основные уравнения движения:
Сопротивления среды
Продольное:
Rтр = 0.5·ρср·Cx·Sлоб·Vx′²
[9]
Боковое:
Rбок = 0.5·ρср·Cy·Sбок·Vy′²
[10]
Параметры поверхности: плотность среды
(ρср), коэффициенты (Cx, Cy) и пр. — из
таблицы адаптивных коэффициентов.
m·(dVy′/dt) = ΣFy′ + m·ωz·Vx′ [12]
ΣMz = Jz·(dωz/dt)
[13]
m·(dVx′/dt) = ΣFx′ - m·ωz·Vy′ [11]
Модель воздушной подушки и давление
Объем подушки: Vпод = Sосн × h
[14]
Изменение давления: dPпод/dt = (kн·Nнагн/Vпод) - (kут·(Pпод/Vпод_eff)) [15]
Подъемная сила: Fвозд = (Pпод - Pатм)·Sосн
[16]
Условие устойчивости: Fвозд ≥ m·g, запас — 1.05–1.2.
PID-регулирование давления в подушке
Pпод(t+Δt) = Pцел·(1 + KpP·Δz/h) + KiP·∫(Δz)dt + KdP·d(Δz)/dt [17]
16.
I НАУЧНЫЙ РЕЗУЛЬТАТ: «Адаптивная система управления безэкипажнымкатером на воздушной подушке»
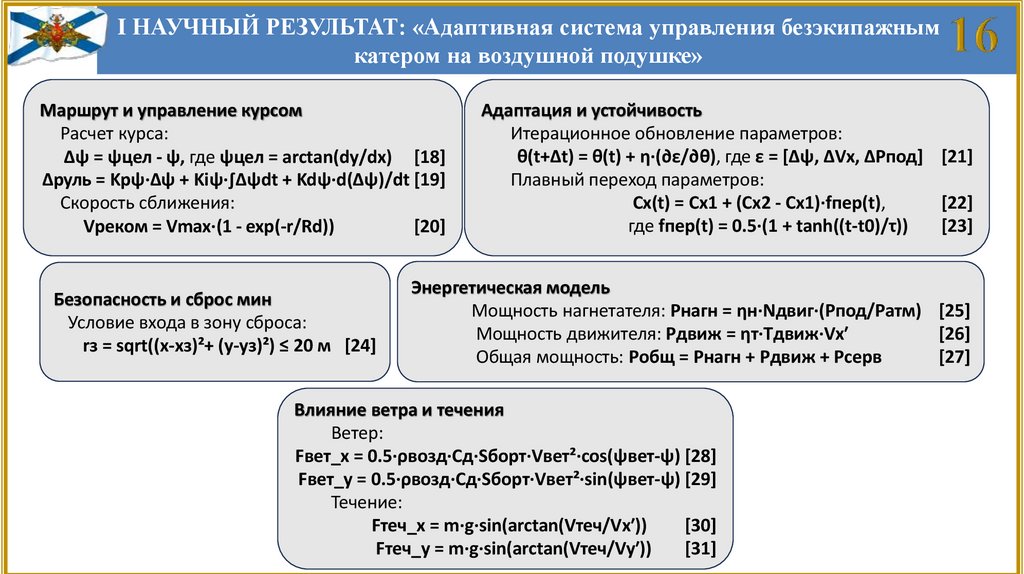
Маршрут и управление курсом
Расчет курса:
Δψ = ψцел - ψ, где ψцел = arctan(dy/dx) [18]
Δруль = Kpψ·Δψ + Kiψ·∫Δψdt + Kdψ·d(Δψ)/dt [19]
Скорость сближения:
Vреком = Vmax·(1 - exp(-r/Rd))
[20]
Безопасность и сброс мин
Условие входа в зону сброса:
rз = sqrt((x-xз)²+ (y-yз)²) ≤ 20 м [24]
Адаптация и устойчивость
Итерационное обновление параметров:
θ(t+Δt) = θ(t) + η·(∂ε/∂θ), где ε = [Δψ, ΔVx, ΔPпод] [21]
Плавный переход параметров:
Cx(t) = Cx1 + (Cx2 - Cx1)·fпер(t),
[22]
где fпер(t) = 0.5·(1 + tanh((t-t0)/τ))
[23]
Энергетическая модель
Мощность нагнетателя: Pнагн = ηн·Nдвиг·(Pпод/Pатм) [25]
Мощность движителя: Pдвиж = ηт·Tдвиж·Vx′
[26]
Общая мощность: Pобщ = Pнагн + Pдвиж + Pсерв
[27]
Влияние ветра и течения
Ветер:
Fвет_x = 0.5·ρвозд·Cд·Sборт·Vвет²·cos(ψвет-ψ) [28]
Fвет_y = 0.5·ρвозд·Cд·Sборт·Vвет²·sin(ψвет-ψ) [29]
Течение:
Fтеч_x = m·g·sin(arctan(Vтеч/Vx′))
[30]
Fтеч_y = m·g·sin(arctan(Vтеч/Vy′))
[31]
17.
I НАУЧНЫЙ РЕЗУЛЬТАТ: «Адаптивная система управления безэкипажнымкатером на воздушной подушке»
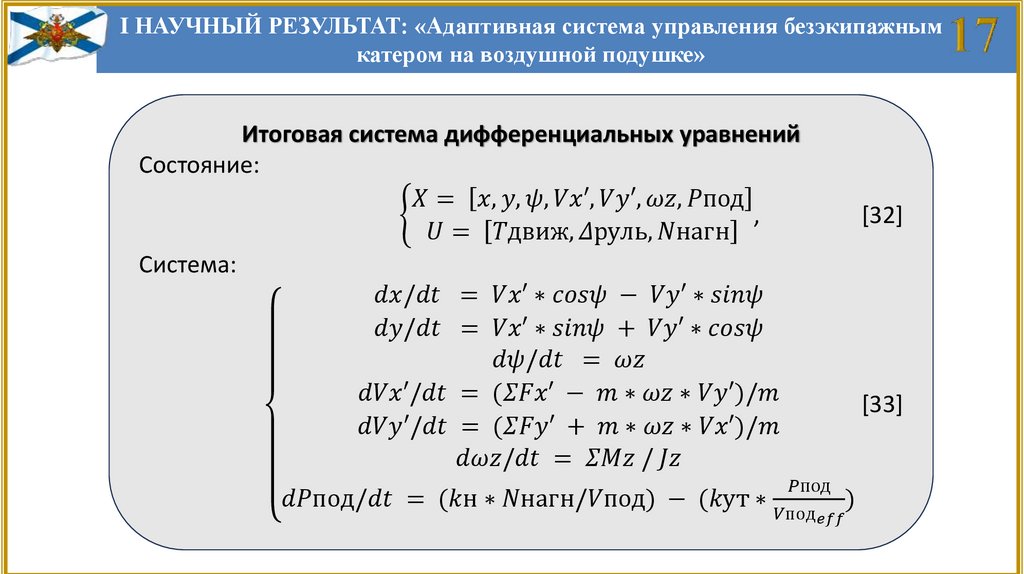
Итоговая система дифференциальных уравнений
Состояние: