




 electronics
electronicsSimilar presentations:










Робототехника в подводном мире
1.
РОБОТОТЕХНИКАВ ПОДВОДНОМ МИРЕ
Подготовил: Иванов Тимур
МОБУ Гимназия №6 им. Зорина Ф.М., 4А класс
Научный руководитель:
Кочеткова Наталья Николаевна
2.
Защита Мирового Океана:Автономные Подводные Роботы
Океаны и моря занимают почти 70% поверхности нашей планеты,
являясь колыбелью огромного количества форм жизни и регулируя
глобальный климат. Однако, несмотря на свою значимость, Мировой
океан остаётся одной из самых уязвимых экосистем. Загрязнение в
результате человеческой деятельности — нефтяные разливы, утечка
токсичных веществ, бытовые отходы — наносит ему серьёзный
ущерб, на устранение которого требуются годы. Традиционные
способы ликвидации загрязнений оказываются недостаточно
быстрыми и требуют больших человеческих усилий. Именно
поэтому возникает необходимость в создании специальных
устройств — подводных роботов, которые могут выполнять работу,
опасную или недоступную человеку.
3.
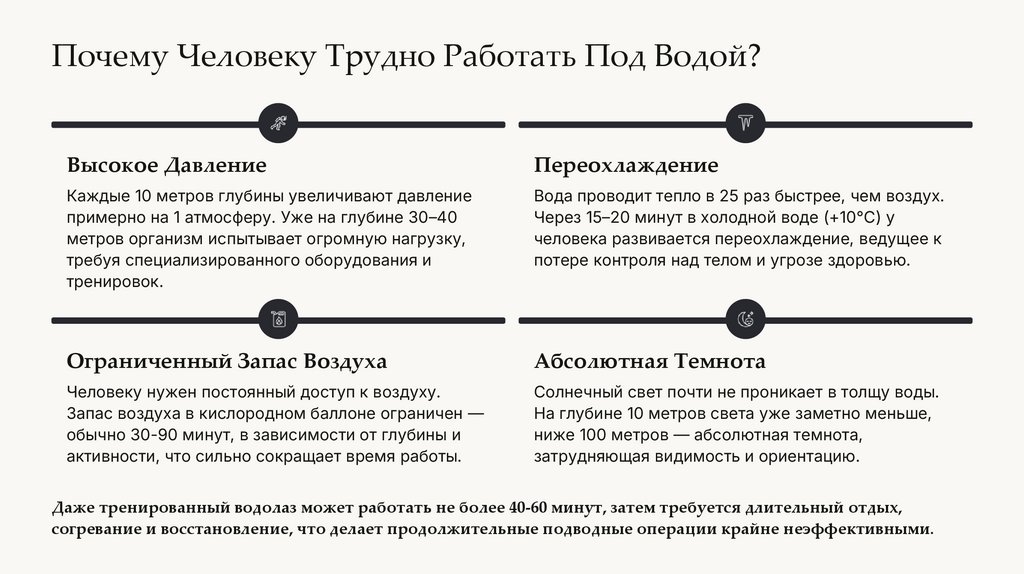
Почему Человеку Трудно Работать Под Водой?Высокое Давление
Переохлаждение
Каждые 10 метров глубины увеличивают давление
примерно на 1 атмосферу. Уже на глубине 30–40
метров организм испытывает огромную нагрузку,
требуя специализированного оборудования и
тренировок.
Вода проводит тепло в 25 раз быстрее, чем воздух.
Через 15–20 минут в холодной воде (+10°C) у
человека развивается переохлаждение, ведущее к
потере контроля над телом и угрозе здоровью.
Ограниченный Запас Воздуха
Абсолютная Темнота
Человеку нужен постоянный доступ к воздуху.
Запас воздуха в кислородном баллоне ограничен —
обычно 30-90 минут, в зависимости от глубины и
активности, что сильно сокращает время работы.
Солнечный свет почти не проникает в толщу воды.
На глубине 10 метров света уже заметно меньше,
ниже 100 метров — абсолютная темнота,
затрудняющая видимость и ориентацию.
Даже тренированный водолаз может работать не более 40-60 минут, затем требуется длительный отдых,
согревание и восстановление, что делает продолжительные подводные операции крайне неэффективными.
4.
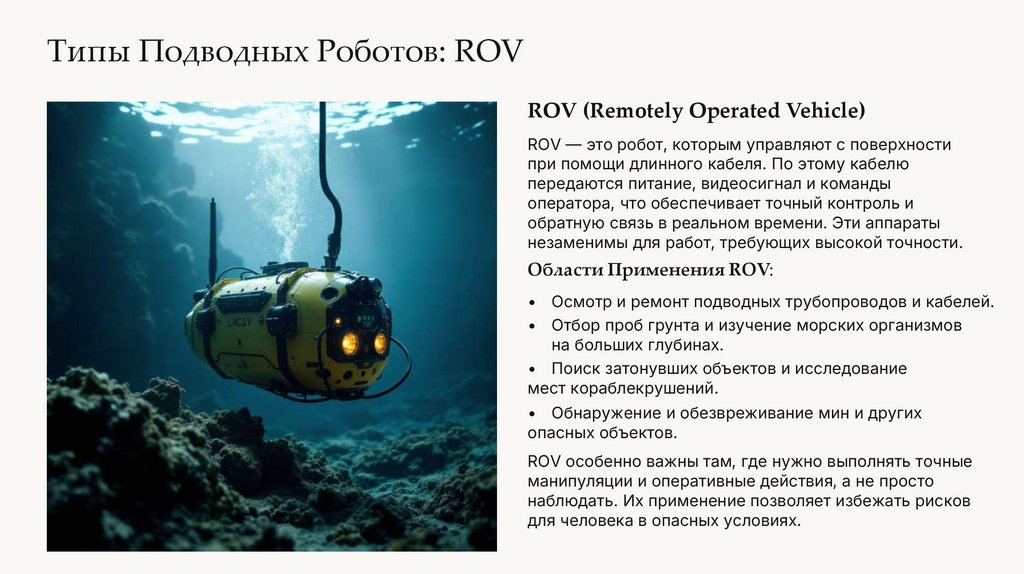
Типы Подводных Роботов: ROVROV (Remotely Operated Vehicle)
ROV — это робот, которым управляют с поверхности
при помощи длинного кабеля. По этому кабелю
передаются питание, видеосигнал и команды
оператора, что обеспечивает точный контроль и
обратную связь в реальном времени. Эти аппараты
незаменимы для работ, требующих высокой точности.
Области Применения ROV:
• Осмотр и ремонт подводных трубопроводов и кабелей.
• Отбор проб грунта и изучение морских организмов
на больших глубинах.
• Поиск затонувших объектов и исследование
мест кораблекрушений.
• Обнаружение и обезвреживание мин и других
опасных объектов.
ROV особенно важны там, где нужно выполнять точные
манипуляции и оперативные действия, а не просто
наблюдать. Их применение позволяет избежать рисков
для человека в опасных условиях.
5.
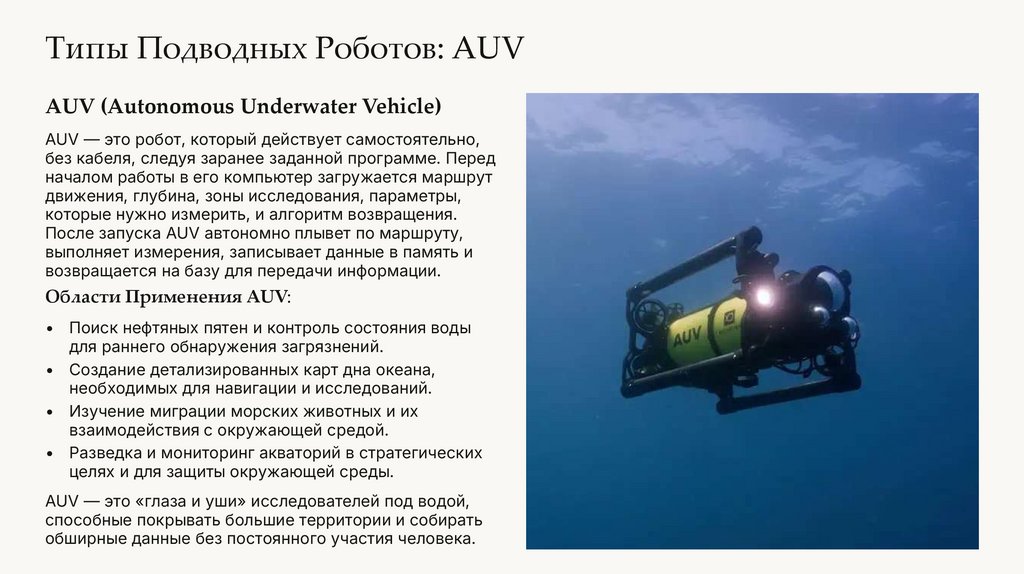
Типы Подводных Роботов: AUVAUV (Autonomous Underwater Vehicle)
AUV — это робот, который действует самостоятельно,
без кабеля, следуя заранее заданной программе. Перед
началом работы в его компьютер загружается маршрут
движения, глубина, зоны исследования, параметры,
которые нужно измерить, и алгоритм возвращения.
После запуска AUV автономно плывет по маршруту,
выполняет измерения, записывает данные в память и
возвращается на базу для передачи информации.
Области Применения AUV:
• Поиск нефтяных пятен и контроль состояния воды
для раннего обнаружения загрязнений.
• Создание детализированных карт дна океана,
необходимых для навигации и исследований.
• Изучение миграции морских животных и их
взаимодействия с окружающей средой.
• Разведка и мониторинг акваторий в стратегических
целях и для защиты окружающей среды.
AUV — это «глаза и уши» исследователей под водой,
способные покрывать большие территории и собирать
обширные данные без постоянного участия человека.
6.
Реальные Случаи Применения: Катастрофа «Титана»Поиск Пропавшего
Батискафа
Роль Робота «Одиссей 6K»
Установление Причины
Трагедии
В июне 2023 года в Атлантическом
Для поиска был задействован
Благодаря оперативному
океане пропал глубоководный
подводный робот «Одиссей 6K»
применению робота удалось быстро
туристический батискаф «Титан»,
(Odysseus 6K), способный
обнаружить обломки аппарата и
направлявшийся к обломкам
погружаться на глубину почти 4
установить причину трагедии, что
«Титаника» на глубине около 3800
километра. Он обследовал район
подчеркивает критическую роль
метров. Связь с ним была потеряна,
поиска, передал видеозаписи и
подводных роботов в спасательных
и началась масштабная поисковая
точные координаты обнаруженных
и исследовательских миссиях на
операция.
обломков.
экстремальных глубинах.
7.
Реальные Случаи Применения: Керченский Разлив15 декабря 2024 года в Керченском проливе
произошла одна из самых заметных экологических
аварий последних лет. В результате разрушения
корпусов двух танкеров в море попало около 30004000 тонн мазута, что привело к масштабному
загрязнению акватории.
Для очистки загрязненных участков был использован
российский подводный робот «Прометей» —
компактный робототехнический комплекс миникласса. Изначально созданный для обследования
водоемов и ремонта подводных объектов, «Прометей»
способен погружаться на глубину до 1000 метров и
управляется с помощью джойстика.
За 2 месяца интенсивной работы «Прометей» собрал
со дна Черного моря более двух тонн нефтяных
отложений, внеся значительный вклад в
восстановление экологической ситуации в акватории и
минимизацию долгосрочных последствий разлива.
8.
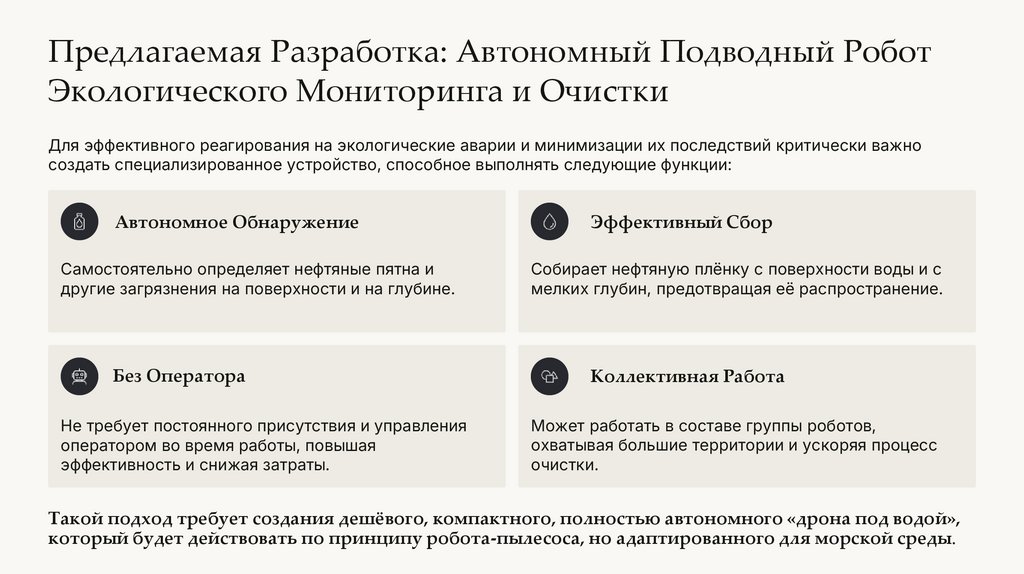
Предлагаемая Разработка: Автономный Подводный РоботЭкологического Мониторинга и Очистки
Для эффективного реагирования на экологические аварии и минимизации их последствий критически важно
создать специализированное устройство, способное выполнять следующие функции:
Автономное Обнаружение
Самостоятельно определяет нефтяные пятна и
другие загрязнения на поверхности и на глубине.
Без Оператора
Не требует постоянного присутствия и управления
оператором во время работы, повышая
эффективность и снижая затраты.
Эффективный Сбор
Собирает нефтяную плёнку с поверхности воды и с
мелких глубин, предотвращая её распространение.
Коллективная Работа
Может работать в составе группы роботов,
охватывая большие территории и ускоряя процесс
очистки.
Такой подход требует создания дешёвого, компактного, полностью автономного «дрона под водой»,
который будет действовать по принципу робота-пылесоса, но адаптированного для морской среды.
9.
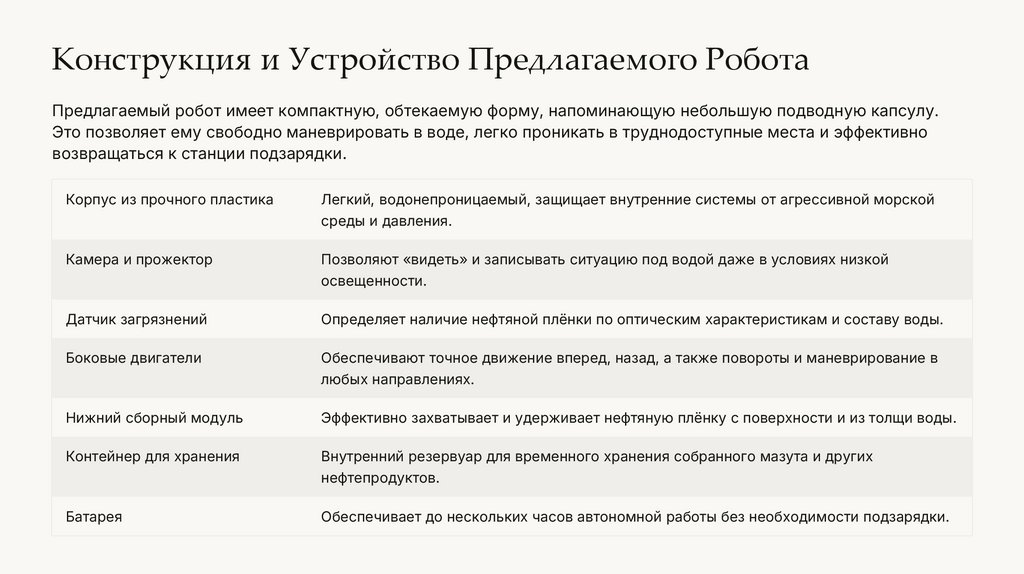
Конструкция и Устройство Предлагаемого РоботаПредлагаемый робот имеет компактную, обтекаемую форму, напоминающую небольшую подводную капсулу.
Это позволяет ему свободно маневрировать в воде, легко проникать в труднодоступные места и эффективно
возвращаться к станции подзарядки.
Корпус из прочного пластика
Легкий, водонепроницаемый, защищает внутренние системы от агрессивной морской
среды и давления.
Камера и прожектор
Позволяют «видеть» и записывать ситуацию под водой даже в условиях низкой
освещенности.
Датчик загрязнений
Определяет наличие нефтяной плёнки по оптическим характеристикам и составу воды.
Боковые двигатели
Обеспечивают точное движение вперед, назад, а также повороты и маневрирование в
любых направлениях.
Нижний сборный модуль
Эффективно захватывает и удерживает нефтяную плёнку с поверхности и из толщи воды.
Контейнер для хранения
Внутренний резервуар для временного хранения собранного мазута и других
нефтепродуктов.
Батарея
Обеспечивает до нескольких часов автономной работы без необходимости подзарядки.
10.
Макет автономного подводного робота11.
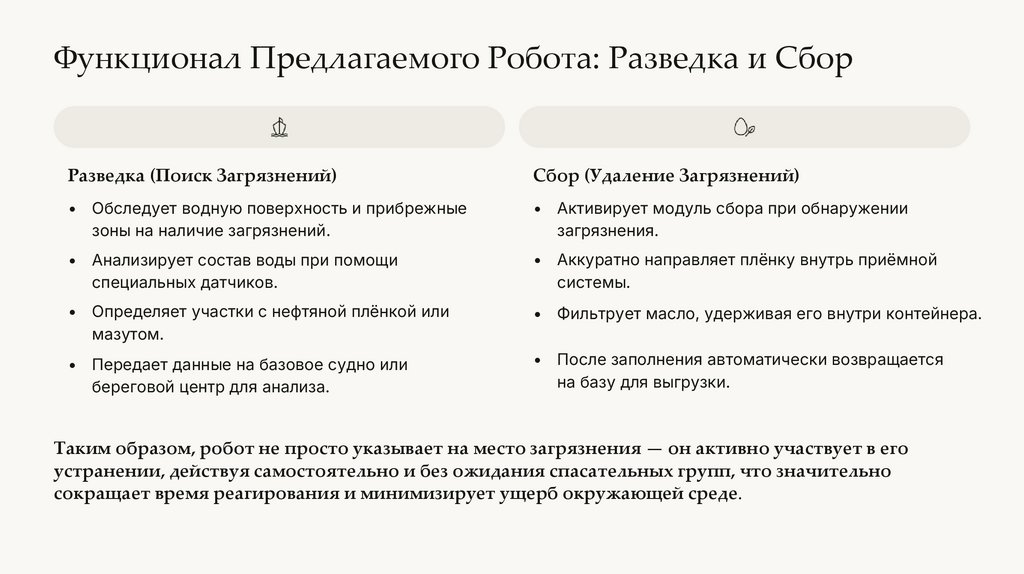
Функционал Предлагаемого Робота: Разведка и СборРазведка (Поиск Загрязнений)
Сбор (Удаление Загрязнений)
• Обследует водную поверхность и прибрежные
зоны на наличие загрязнений.
• Активирует модуль сбора при обнаружении
загрязнения.
• Анализирует состав воды при помощи
специальных датчиков.
• Аккуратно направляет плёнку внутрь приёмной
системы.
• Определяет участки с нефтяной плёнкой или
мазутом.
• Фильтрует масло, удерживая его внутри контейнера.
• Передает данные на базовое судно или
береговой центр для анализа.
• После заполнения автоматически возвращается
на базу для выгрузки.
Таким образом, робот не просто указывает на место загрязнения — он активно участвует в его
устранении, действуя самостоятельно и без ожидания спасательных групп, что значительно
сокращает время реагирования и минимизирует ущерб окружающей среде.
12.
Визуализация автономного подводного робота13.
Корабль-Носитель: Поддерживающая ПлатформаДля эффективной работы автономных подводных роботов необходима специальная поддерживающая платформа
— корабль-носитель. Он является «базой» и «центром управления» всей системы, обеспечивая бесперебойное
функционирование флота роботов.
Палубная Док-станция
Система Выгрузки Загрязнений
Автоматизированное место для швартовки и парковки
Перекачивает собранный мазут из робота в основной
роботов после выполнения миссии или для подзарядки.
резервуар корабля-носителя.
Контейнер-Резервуар
Электрическая Станция
Хранит собранные нефтепродукты до момента доставки
Обеспечивает быструю и эффективную зарядку батарей
на берег для дальнейшей утилизации.
роботов, минимизируя время простоя.
Навигационный Модуль Связи
Мини-Лаборатория Мониторинга
Синхронизирует работу всех роботов через спутник или
Анализирует состояние воды и фиксирует степень
радиоканал, обеспечивая их координацию.
очищения, предоставляя данные в реальном времени.
Корабль-носитель может быть выполнен на базе небольшого судна прибрежного класса, он не должен быть
большим или дорогим, так как его задача — не буксировка, а обслуживание и координация работы флота
автономных роботов.