


 electronics
electronicsSimilar presentations:





. Тема 1.3")


")

Автопилот. .Лабораторная 1
1.
.Лабораторная 1Автопилот
- Виртуальная машина COEX
- Проект Flix
- QGroundControl
к.т.н., доцент каф.806
Ухов Петр Александрович
2.
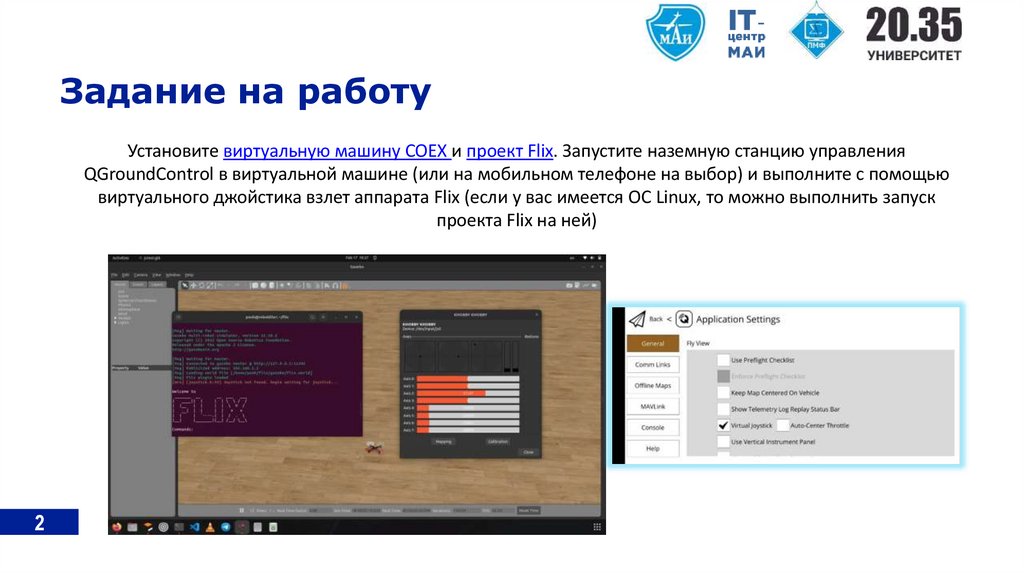
Задание на работуУстановите виртуальную машину COEX и проект Flix. Запустите наземную станцию управления
QGroundControl в виртуальной машине (или на мобильном телефоне на выбор) и выполните с помощью
виртуального джойстика взлет аппарата Flix (если у вас имеется ОС Linux, то можно выполнить запуск
проекта Flix на ней)
2
3.
Установка виртуальной машины COEXАвтопилот PX4 лежит в основе учебного конструктора COEX (Клевер). Воспользуемся заранее
настроенной виртуальной машиной COEX на базе Ubuntu 20.04, автопилота PX4, среды симуляции
Gazebo и фреймворка ROS. Порядок установки ВМ следующий:
1. Скачайте по ссылке архив с дистрибутивом VMWare
2. Установите из архива VMware-workstation-full-17.6.1-24319023 (Personal Use)
3. Далее следуйте инструкции по ссылке.
4. Скачайте образ виртуальной машины по ссылке.
5. При установке важно увеличить объем памяти, количество ядер, включить 3D ускорение, сеть в
режиме «Мост» для виртуального адаптера.
6. Дополнительно увеличьте память для Display,
т.к. в ряде случаев для запуска Gazebo
с проектом Flix текущей конфигурации
недостаточно.
7. Запустите виртуальную машину
3
Источник: https://clover.coex.tech/ru/simulation_vm.html
4.
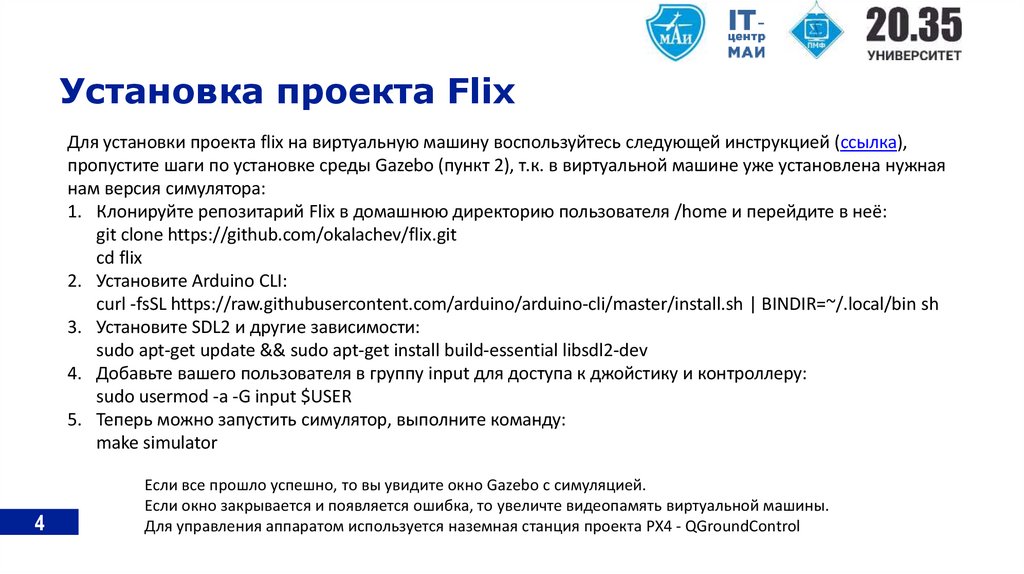
Установка проекта FlixДля установки проекта flix на виртуальную машину воспользуйтесь следующей инструкцией (ссылка),
пропустите шаги по установке среды Gazebo (пункт 2), т.к. в виртуальной машине уже установлена нужная
нам версия симулятора:
1. Клонируйте репозитарий Flix в домашнюю директорию пользователя /home и перейдите в неё:
git clone https://github.com/okalachev/flix.git
cd flix
2. Установите Arduino CLI:
curl -fsSL https://raw.githubusercontent.com/arduino/arduino-cli/master/install.sh | BINDIR=~/.local/bin sh
3. Установите SDL2 и другие зависимости:
sudo apt-get update && sudo apt-get install build-essential libsdl2-dev
4. Добавьте вашего пользователя в группу input для доступа к джойстику и контроллеру:
sudo usermod -a -G input $USER
5. Теперь можно запустить симулятор, выполните команду:
make simulator
4
Если все прошло успешно, то вы увидите окно Gazebo с симуляцией.
Если окно закрывается и появляется ошибка, то увеличте видеопамять виртуальной машины.
Для управления аппаратом используется наземная станция проекта PX4 - QGroundControl
5.
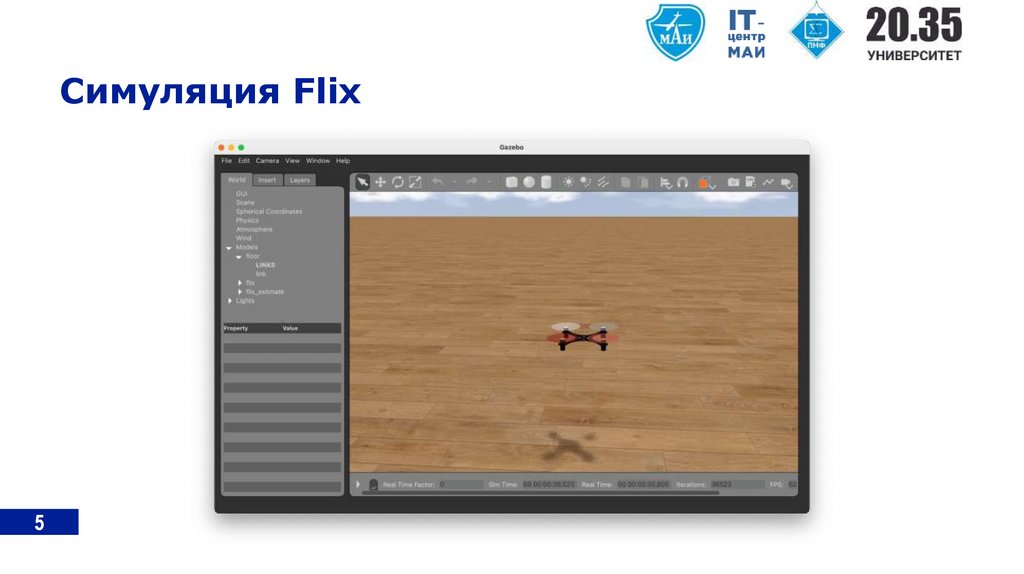
Симуляция Flix5
6.
Устанавливаем qGroundControl - практика6
7.
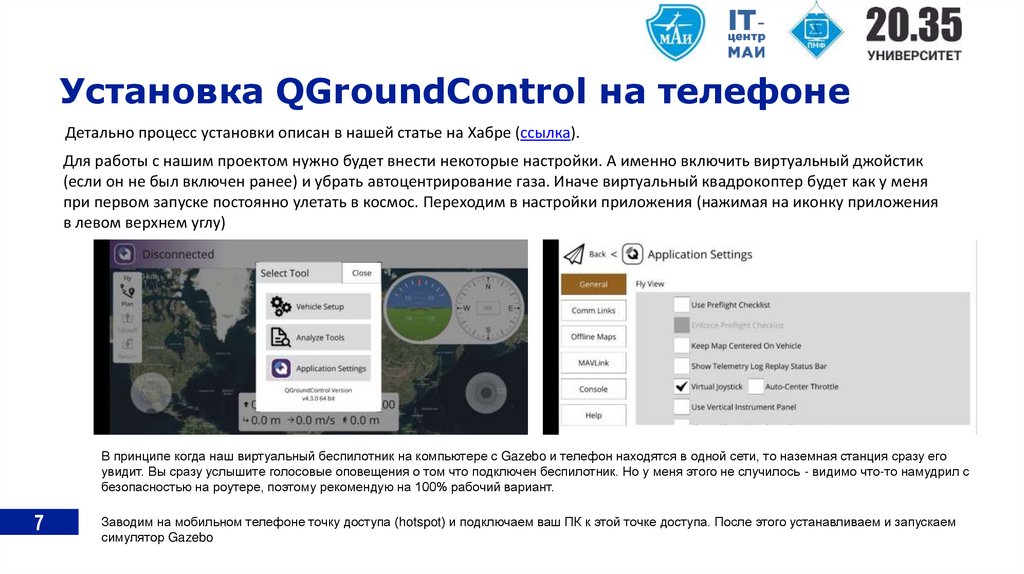
Установка QGroundControl на телефонеДетально процесс установки описан в нашей статье на Хабре (ссылка).
Для работы с нашим проектом нужно будет внести некоторые настройки. А именно включить виртуальный джойстик
(если он не был включен ранее) и убрать автоцентрирование газа. Иначе виртуальный квадрокоптер будет как у меня
при первом запуске постоянно улетать в космос. Переходим в настройки приложения (нажимая на иконку приложения
в левом верхнем углу)
В принципе когда наш виртуальный беспилотник на компьютере с Gazebo и телефон находятся в одной сети, то наземная станция сразу его
увидит. Вы сразу услышите голосовые оповещения о том что подключен беспилотник. Но у меня этого не случилось - видимо что-то намудрил с
безопасностью на роутере, поэтому рекомендую на 100% рабочий вариант.
7
Заводим на мобильном телефоне точку доступа (hotspot) и подключаем ваш ПК к этой точке доступа. После этого устанавливаем и запускаем
симулятор Gazebo