




")
 mathematics
mathematicsSimilar presentations:










Системы линейных уравнений
1. Линейная алгебра и аналитическая геометрия
Тема: Системылинейных
уравнений
Лектор Имас О.Н.
2. Метод Крамера
(Это вы уже должны были написать)Метод Крамера
ТЕОРЕМА (Крамера).
Если в системе линейных уравнений число уравнений m и
число неизвестных n совпадает и |A| 0, то система
совместна и имеет единственное решение, которое может
быть найдено по формулам
Di
xi
(i 1, 2, n)
(2)
D
где D=|A|, а Di– определитель, получаемый из определителя
D заменой его i-го столбца на столбец свободных членов.
Формулы (2) называются формулами Крамера.
пропустить 20 клеточек
3. Ранг матрицы
(Это уже новое. Продолжайте писать)a11 a12
a
a22
21
Пусть A = (aij) – матрица размера m×n.
A
Выпишем все миноры матрицы A
am1 am 2
первого порядка
M 1(1) , M 1( 2) , M1(3) , ...
Ранг матрицы
a1n
a2 n
amn
M 2(1) , M 2( 2) , M 2(3) , ...
...............................
t-го порядка (где t = min{m,n}): M t(1) , M t( 2) , M t(3) , ...
второго порядка
ОПР. Минор
Mk
матрицы
A
называется ее
базисным минором, если он отличен от нуля, а все миноры
матрицы A более высокого порядка k+1, k+2,…, t равны нулю.
Метод окаймляющих миноров.
пропустить 15 клеточек
ОПР. Рангом матрицы A называется порядок ее базисного минора.
Обозначают: r(A) или rang(A).
4. Метод нахождения ранга матрицы
Метод окаймляющих миноров.Метод элементарных преобразований.
Элементарные
преобразования
матрицы
–
это
преобразования следующего вида:
1) умножение строки (столбца) на число 0;
2) прибавление к i-й строке (столбцу) k-й строки (столбца),
умноженной на число 0;
3) перестановка i-й и k-й строки (столбца).
Матрица B называется эквивалентной матрице A , если она
может быть получена из A элементарными преобразованиями.
Обозначают: A ~ B.
ТЕОРЕМА 2. Эквивалентные матрицы имеют равные ранги.
пропустить 25 клеточек
5. Системы линейных уравнений 1. Основные понятия
Уравнение называется линейным, если оно содержитнеизвестные только в первой степени и не содержит
произведений неизвестных, т.е. если оно имеет вид
a1x1 + a2x2 + … + anxn = b ,
где ai,b – числа.
ai - коэффициенты уравнения, b - свободный член.
Если b = 0, то уравнение называется однородным.
Если b ≠ 0 уравнение называется неоднородным.
Рассмотрим систему m линейных уравнений с n неизвестными,
т.е. систему вида
a11 x1 a12 x2 a1n xn b1 ,
a x a x a x b ,
21 1
22 2
2n n
2
(1)
am1x1 am 2 x2 amn xn bm .
6.
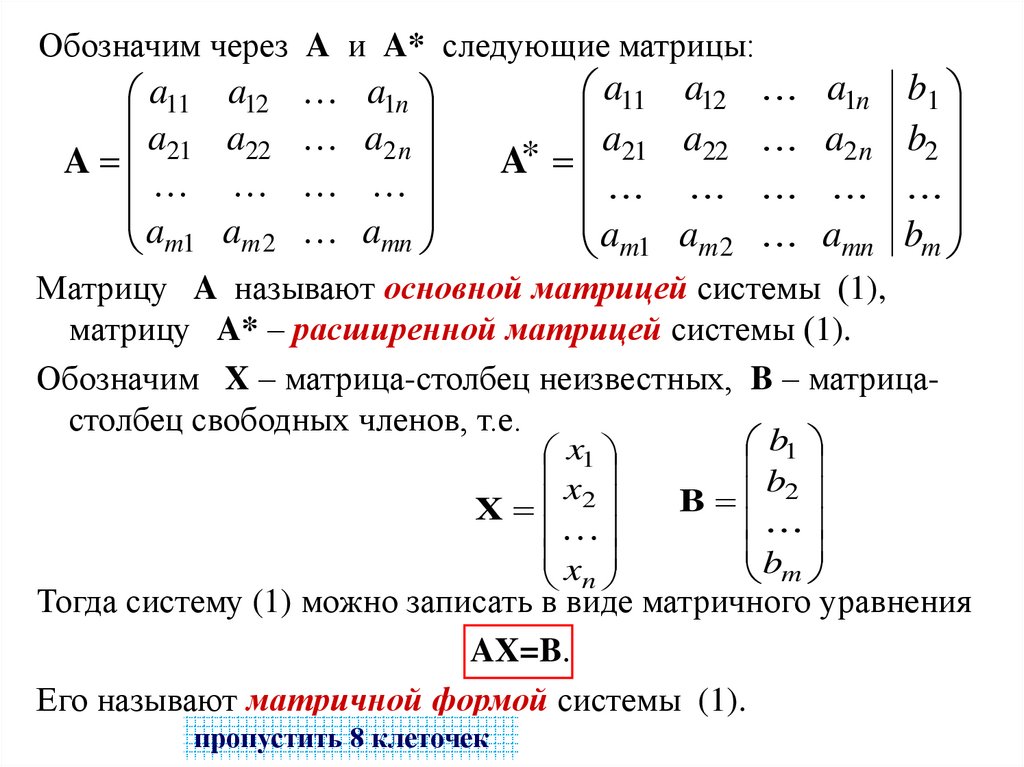
Обозначим через A и A* следующие матрицы:a11
a21
A
a
m1
a12 a1n
a22 a2 n
am 2 amn
a11
a21
*
A
a
m1
a12 a1n
a22 a2 n
am 2 amn
b1
b2
bm
Матрицу A называют основной матрицей системы (1),
матрицу A* – расширенной матрицей системы (1).
Обозначим X – матрица-столбец неизвестных, B – матрицастолбец свободных членов, т.е.
b1
x1
b
x2
2
B
X
b
x
m
n
Тогда систему (1) можно записать в виде матричного уравнения
AX=B.
Его называют матричной формой системы (1).
пропустить 8 клеточек
7.
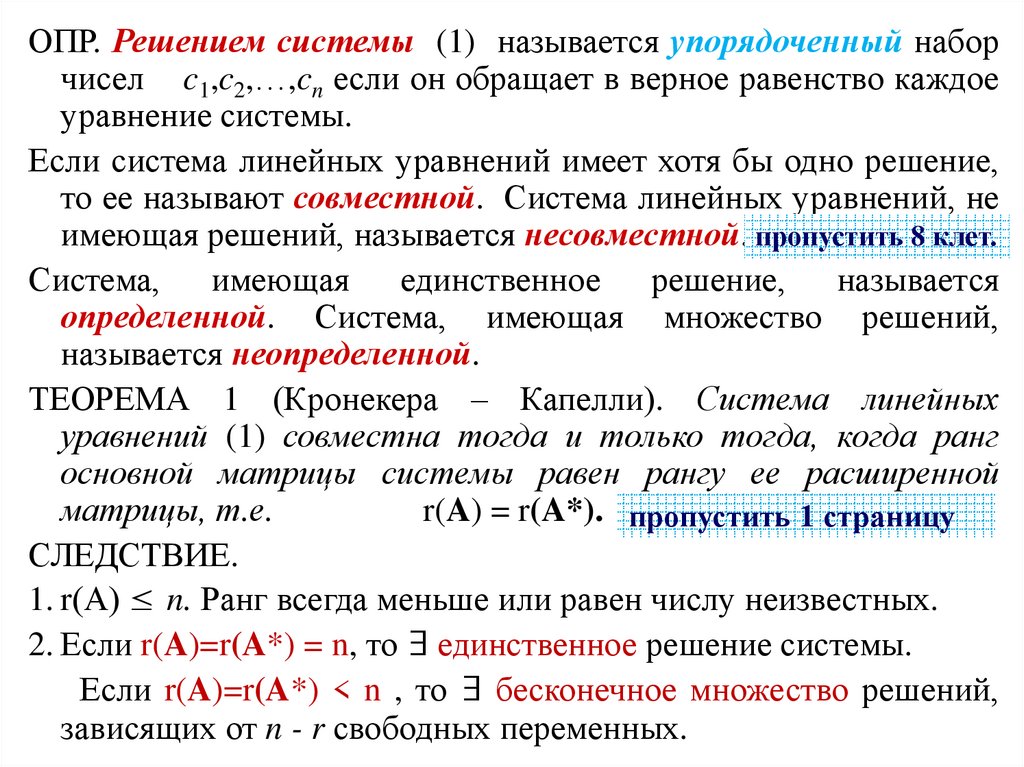
ОПР. Решением системы (1) называется упорядоченный наборчисел c1,c2,…,cn если он обращает в верное равенство каждое
уравнение системы.
Если система линейных уравнений имеет хотя бы одно решение,
то ее называют совместной. Система линейных уравнений, не
имеющая решений, называется несовместной. пропустить 8 клет.
Система, имеющая единственное решение, называется
определенной. Система, имеющая множество решений,
называется неопределенной.
ТЕОРЕМА 1 (Кронекера – Капелли). Система линейных
уравнений (1) совместна тогда и только тогда, когда ранг
основной матрицы системы равен рангу ее расширенной
матрицы, т.е.
r(A) = r(A*). пропустить 1 страницу
СЛЕДСТВИЕ.
1. r(А) ≤ n. Ранг всегда меньше или равен числу неизвестных.
2. Если r(A)=r(A*) = n, то ∃ единственное решение системы.
Если r(A)=r(A*) < n , то ∃ бесконечное множество решений,
зависящих от n - r свободных переменных.
8. Метод Гаусса (метод исключения неизвестных)
Две системы называются эквивалентными (равносильными)если их решения совпадают. К эквивалентной системе можно
перейти с помощью элементарных преобразований системы.
Элементарными преобразованиями системы линейных
уравнений называются преобразования следующего вида:
1) умножение обеих частей уравнения на число α 0;
2) прибавление к одному уравнению другого, умноженного на
число α 0;
3) перестановка двух уравнений;
На практике вместо уравнений системы работают с матрицей,
составленной из коэффициентов – расширенной матрицей
9.
na x b , i 1, m
j 1
ij
j
i
a11 x1
a x
21 1
am1 x1
a12 x2
a22 x2
a1n xn
a2 n xn
am 2 x2
amn xn
bm .
a1n b1 a11
a11 a12
0
a
a2 n b2
21 a22
~
amn bm 0
am1 am 2
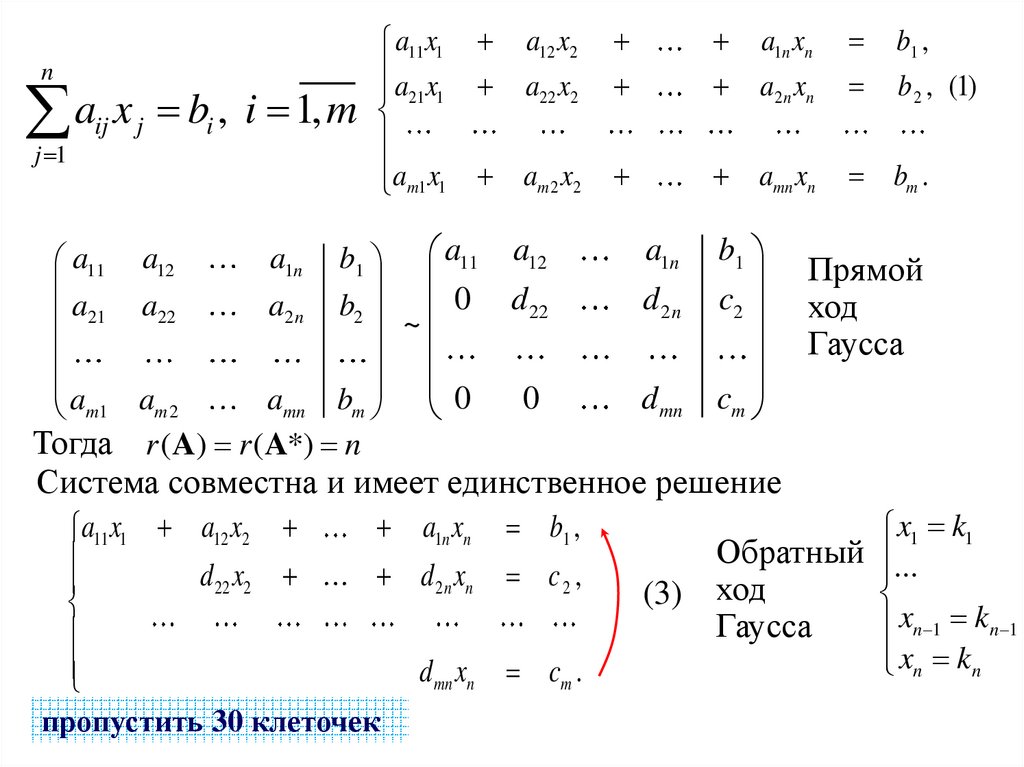
Тогда r ( A) r ( A*) n
a12
d 22
a1n
d2n
0
d mn
b1
c2
cm
b1 ,
b 2 , (1)
Прямой
ход
Гаусса
Система совместна и имеет единственное решение
a1n xn b1 ,
a11 x1 a12 x2
d 22 x2
d 2 n xn c 2 ,
d mn xn cm .
пропустить 30 клеточек
(3)
x1 k1
Обратный ...
ход
Гаусса
xn 1 kn 1
xn kn
10.
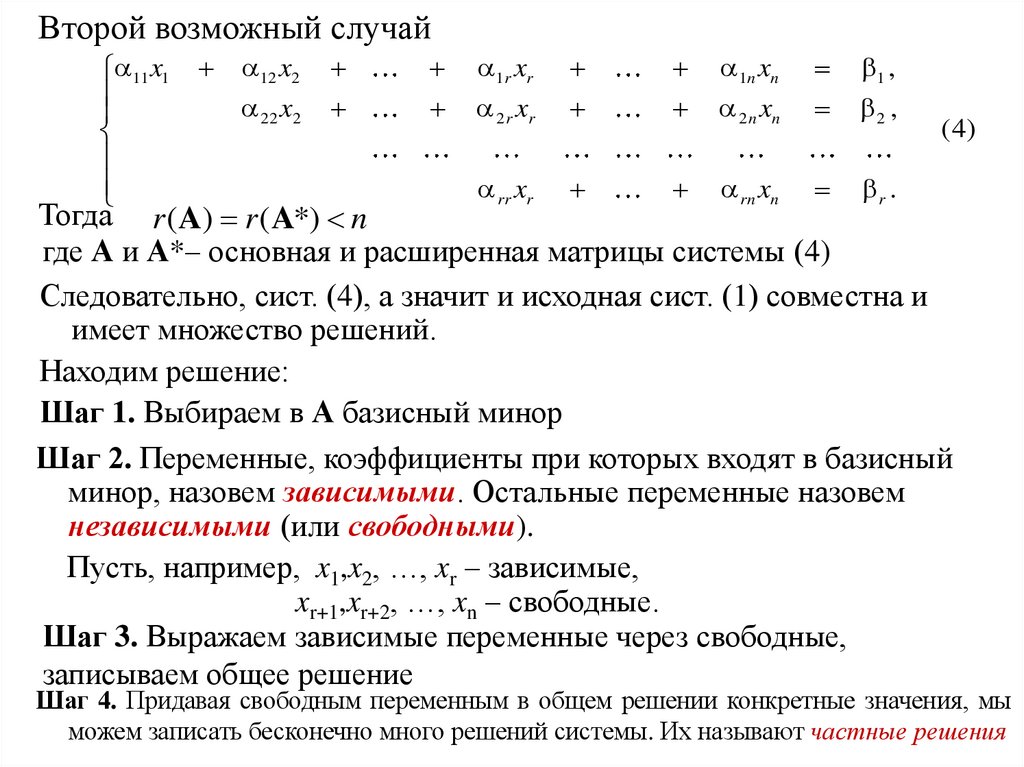
Второй возможный случай11 x1
12 x2
22 x2
1r xr
2 r xr
1n xn
2 n xn
1 ,
2 ,
rr xr
rn xn
r .
(4)
Тогда r ( A) r ( A*) n
где А и А*– основная и расширенная матрицы системы (4)
Следовательно, сист. (4), а значит и исходная сист. (1) совместна и
имеет множество решений.
Находим решение:
Шаг 1. Выбираем в А базисный минор
Шаг 2. Переменные, коэффициенты при которых входят в базисный
минор, назовем зависимыми. Остальные переменные назовем
независимыми (или свободными).
Пусть, например, x1,x2, …, xr – зависимые,
xr+1,xr+2, …, xn – свободные.
Шаг 3. Выражаем зависимые переменные через свободные,
записываем общее решение
Шаг 4. Придавая свободным переменным в общем решении конкретные значения, мы
можем записать бесконечно много решений системы. Их называют частные решения