

 electronics
electronicsSimilar presentations:










Основы цифровых систем автоматического управления мобильных роботов
1.
Основы цифровых систем автоматическогоуправления мобильных роботов
Цель работы:изучение основных принципов цифровых
систем автоматического управления мобильных роботов
Задачи работы:анализ цифровых систем управления,их
преимущества и недостатки,разработки системы управления
Выполнила:Cмоленникова Юлия
Группа:2-МиМР
1
2.
Бортовые вычислительныесредства(БВС)
Бортовые вычислительные средства — это совокупность аппаратнопрограммных средств, которые обеспечивают автоматизацию
информационных и управляющих процессов на борту объекта в режиме
реального времени.
Такие средства размещают на летательных аппаратах (космических
кораблях, самолётах, вертолётах), а также на морских судах и наземных
транспортных средствах.
Некоторые функции бортовых вычислительных средств:
регулирование работы двигателей;
обработка сигналов радиолокационной станции;
решение задач навигации;
выведение объекта на цель;
2
3.
Преобразование аналоговых сигналов вцифровые
Цифровые системы аналоговых сигналов-называется аналогоцифровым преобразованием (АЦП).
Пример необходимости преобразования:
Запись звука- В первичном виде звук представляет собой сумму волн с
различными частотами, которые при разложении по частотам можно
приблизить к определённому набору.
Измерение- Электронные термометры, вольтметры, амперметры и
прочие измерительные приборы взаимодействуют с аналоговыми
величинами.
3
4.
Преобразование аналоговых сигналов вцифровые
Методы преобразования (АЦП)
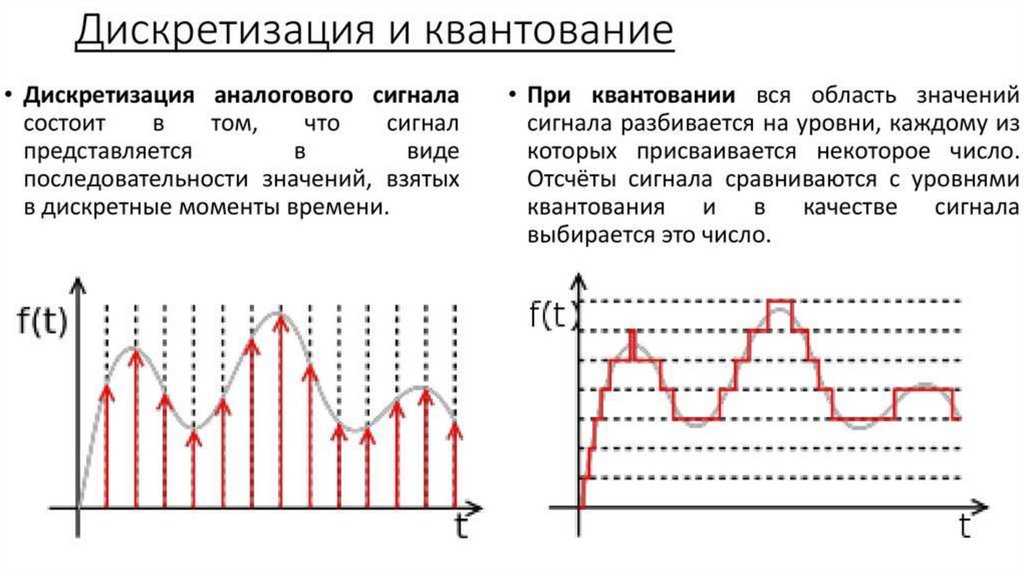
Дискретизация исходных аналоговых данных по времени. Происходит
выборка значений входного аналогового сигнала в определённые
дискретные моменты времени.
Квантование полученных значений по уровню (амплитуде). Округление
значений непрерывной функции до известных величин.
Пример:
-Микроконвертор ADuC812 принимает аналоговые сигналы, преобразует
их в цифровые коды, обрабатывает эти коды и с помощью ЦАП вновь
преобразует результаты в аналоговые сигналы.
4
5.
6.
Бортовые вычислительныесредства(БВС)
Принципы работы БВС включают:
Сопряжение с бортовой аппаратурой. Средства информационного
обмена обеспечивают приём исходных данных от источников
информации и выдачу результирующих величин на приёмники
информации через внешний интерфейс
Многократное повторение алгоритма. Это характерно для работы
БЦВМ в контуре управления летательным аппаратом
Например, микропроцессор с мощностью 60 Гфлопс обрабатывает
данные камеры для классификации поверхности движения по опорной
проходимости, а с мощностью 8Гфлопс — данные простых датчиков,
например 2D-лидаров.
6
7.
Информационно-измерительныесистемы
Информационно-измерительные системы (ИИС) — это совокупность
функционально объединённых измерительных, вычислительных и других
вспомогательных технических средств для получения измерительной
информации, её преобразования, обработки с целью представления в
требуемом виде либо осуществления логических функций контроля,
диагностики, идентификации.
7
8.
Информационно-измерительные системы8
9.
Информационно-измерительныесистемы
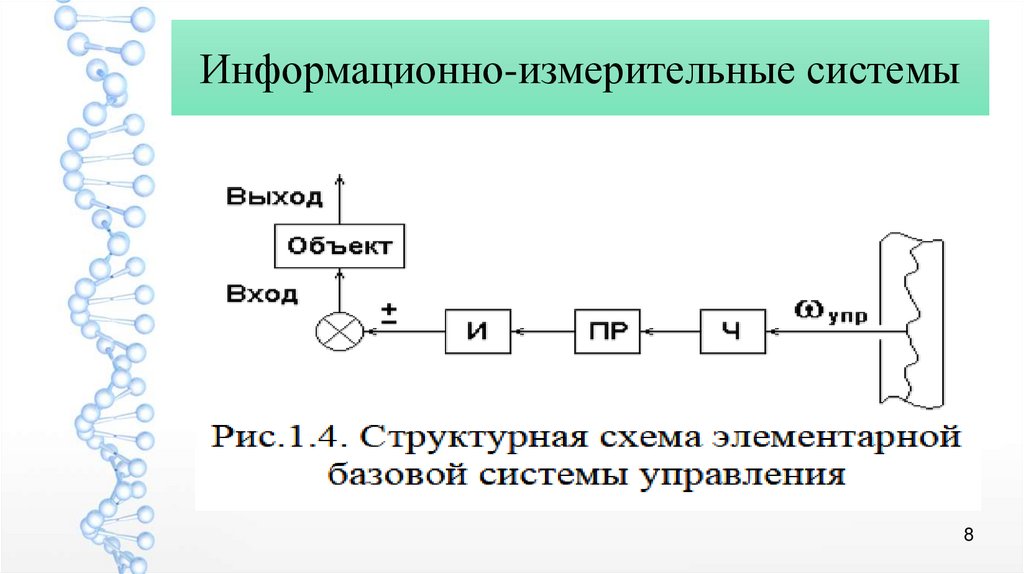
Здесь ω упр- сигнал управления ( с какого – то носителя информации ,
например магнитной ленты ). Управление рассматривается как
воздействие на управляемый процесс по определенной программе .
При управлении технологическими процессами , объектами возникает
задача измерения нескольких параметров и принятия решения о
воздействии на объект . Чем выше уровень автоматизации, тем
больше вычислительных операций выполняют сами приборы. В этом
случае необходимым звеном в системе измерения является
вычислительное устройство.
9
10.
Следящие системыСледящие системы — это комплекс устройств и программного
обеспечения, которые обеспечивают точное позиционирование и
управление движением мехатронных устройств и мобильных роботов.
Они состоят из следующих основных компонентов:
Датчики положения и ориентации — предоставляют информацию о
текущем положении и ориентации робота в пространстве
Контроллеры — обрабатывают информацию от датчиков и формируют
управляющие сигналы для исполнительных механизмов
Исполнительные механизмы — обеспечивают перемещение робота в
соответствии с управляющими сигналами
Программное обеспечение — управляет работой всей системы,
обеспечивает взаимодействие между компонентами и реализацию
алгоритмов слежения.
10
11.
Следящие системыСледящие системы могут быть реализованы с помощью различных
методов и технологий, таких как:
Оптические системы: камеры и датчики изображения.
Радиолокационные системы: радиоволны.
Ультразвуковые системы: ультразвуковые волны.
Инфракрасные системы: инфракрасное излучение.
Гироскопы и акселерометры: датчики движения.
Микроконтроллеры и программирование: микроконтроллеры и
алгоритмы
11
12.
Импульсные системыИмпульсная система — это система автоматического управления, в
которой управление осуществляется кратковременными (импульсными)
сигналами, возникающими в определённые моменты времени.
В таких системах контур управления замыкается только на определённые
промежутки времени, осуществляя воздействия на исполнительный орган
импульсами. В паузах между импульсами цепь управления остаётся
разомкнутой
ПРИМЕРЫ ИМПУЛЬСНЫХ СИСТЕМ:
Система управления двигателем автомобиля — в этой системе
импульсные сигналы используются для управления зажиганием,
впрыском топлива и другими параметрами двигателя.
Система управления роботом — в этой системе импульсные сигналы
используются для управления движением робота.
12
13.
Импульсные системыПреимущества импульсных систем:
Высокая точность управления — импульсные системы позволяют достичь высокой точности
управления объектом благодаря использованию импульсных сигналов.
Быстродействие — импульсные системы способны быстро реагировать на изменения
параметров объекта управления.
Энергоэффективность — импульсные системы могут быть более энергоэффективными по
сравнению с другими типами систем управления.
Недостатки импульсных систем:
Сложность реализации — импульсные системы требуют более сложной реализации по
сравнению с другими типами систем управления.
Необходимость в точной настройке — импульсные системы требуют точной настройки
параметров для достижения оптимальной работы.
Чувствительность к помехам — импульсные системы могут быть чувствительны к помехам
и шумам в сигнале
13
14.
Таймеры,прерываний и управление вреальном времени
Таймеры прерываний — это специальные устройства в
микроконтроллерах, которые генерируют прерывания раз в заданный
интервал времени.
Прерывания позволяют микроконтроллеру выполнять другие задачи, пока
таймер отсчитывает время. Это полезно для выполнения периодических
задач без постоянного опроса таймера
Управление таймерами прерывания в реальном времени осуществляется
с помощью регистров, которые определяют различные параметры работы
таймера.
14
15.
16.
Решетчатая функцияДискретное преобразование Лапса является
функциональным преобразованием решетчатых
фунций.
Параметры преобразования q-в общем случае
является комплексным числом.
При замене непрерывной зависимости решетчатой
функцией часть информации теряется.Происходят
потери при работе импульсных модуляторов