

 electronics
electronicsSimilar presentations:










Аппаратное и программное обеспечение систем управления шап
1.
ПРОГРАММИРОВАНИЕ МОБИЛЬНОГОРОБОТА
Выполнила ст. гр. 22КП2
Т.М. Блажнова
Проверил: кандидат технических наук, доцент
Д.С. Шапошник
2.
Содержание■ Учебные вопросы;
■ Вступление;
■ Основная часть;
■ Список использованных источников
3.
Учебные вопросы:■ Требование к системам управления робототехническими системами;
■ Ведущая роль управляющей ЭВМ в реализации цифрового управления
робототехническими системами.
4.
Вступление■ Робот (чеш. robot, от robota — «подневольный труд») — автоматическое устройство,
предназначенное для осуществления различного рода механических операций, которое
действует по заранее заложенной программе. Робот обычно получает информацию о
состоянии окружающего пространства посредством датчиков (технических аналогов
органов чувств живых организмов). Робот может самостоятельно осуществлять
производственные и иные операции, частично или полностью заменяя труд человека.
При этом робот может как иметь связь с оператором, получая от него команды (ручное
управление), так и действовать автономно, в соответствии с заложенной программой
(автоматическое управление).
Сборка высокотехнологичного
робота
5.
9■ Робототехника (от робот и техника; англ. robotics — роботика, роботехника) —
прикладная наука, занимающаяся разработкой автоматизированных
технических систем и являющаяся важнейшей технической основой развития
производства.
■ Робототехника опирается на такие дисциплины, как электроника, механика,
кибернетика, телемеханика, мехатроника, информатика, а также радиотехника и
электротехника. Выделяют строительную, промышленную, бытовую,
медицинскую, авиационную и экстремальную (военную, космическую,
подводную) робототехнику.
Сборка робототехнических
машин
6.
Основная частьВопрос №1
Требование к системам управления робототехническими системами
ГОСТ Р 60.1.2.2-2016/ИСО 10218-2:2011 Роботы и робототехнические
устройства. Требования по безопасности для промышленных роботов.
Робототехнические системы и их интеграция.
■ 5.3 Конструкция и установка
■ 5.3.1 Условия окружающей среды
■ 5.3.2 Размещение органов управления
■ 5.3.3 Органы управления приводами
■ 5.3.4 Требования к питанию
Военный дрон
7.
■ 5.3.5 Требования к эквипотенциальному соединению/заземлениюш
■ 5.3.6 Изоляция источников энергии
■ 5.3.7 Управление накопленной энергией
■ 5.3.8 Функции остановки робототехнической системы или роботизированного
модуля
■ 5.3.8.1 Общие положения
■ 5.3.8.2 Функция аварийной остановки
Дрон в
строительстве
8.
Вопрос №2Ведущая роль управляющей ЭВМ в реализации цифрового
управления робототехническими системами.
Робот пылесос
Умная колонка
Увлажнитель воздуха
Цифровая вычислительная техника сегодня есть в каждом доме. Эта техника не только
позволяет решать математические задачи, но и существенно улучшает качество нашей жизни,
обеспечивая ненавязчивый сервис работы бытовой техники.
9.
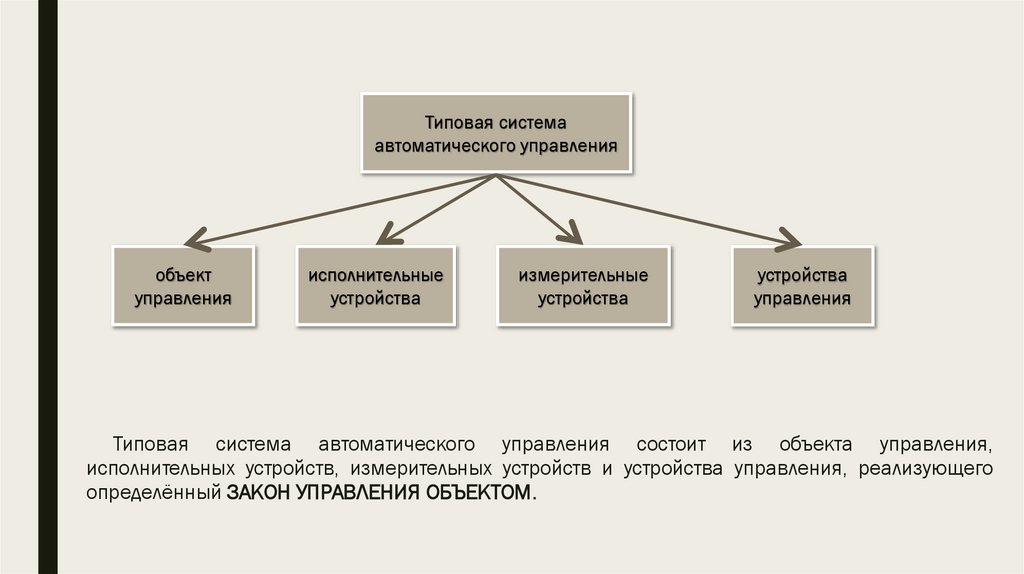
аТиповая система
автоматического управления
объект
управления
исполнительные
устройства
измерительные
устройства
устройства
управления
Типовая система автоматического управления состоит из объекта управления,
исполнительных устройств, измерительных устройств и устройства управления, реализующего
определённый ЗАКОН УПРАВЛЕНИЯ ОБЪЕКТОМ.
10.
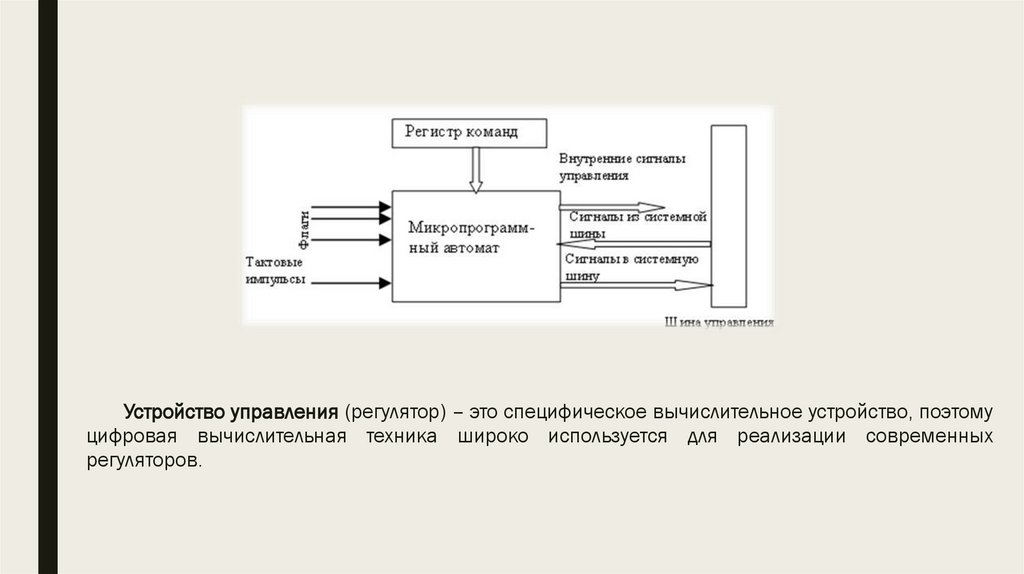
оУстройство управления (регулятор) – это специфическое вычислительное устройство, поэтому
цифровая вычислительная техника широко используется для реализации современных
регуляторов.
11.
е■
На ход управляемого процесса в объекте управления (ОУ) влияет исполнительное
устройство (ИУ). Параметры управляемого процесса измеряются датчиками (Д).
Управляет процессом цифровое вычислительное устройство (ЦВУ), которое
обрабатывает информацию от датчиков и формирует сигнал управления. ЦВУ
соединяется с датчиками и исполнительным устройством посредством специальных
устройств сопряжения с объектом (УСО). Для преобразования сигналов управления
УСО обычно содержат цифро-аналоговые либо широтно-импульсные преобразования
(ЦАП). Для преобразования сигналов датчиков УСО обычно содержат аналогоцифровые преобразователи (АЦП). Задание желаемого значения регулируемого
процесса и контроль результата выполняется устройством более высокого уровня
управления, связь с которым осуществляется по цифровой линии связи (ЛС). Линия
связи сопрягается с ЦВУ посредством специального модуля согласования –
приемопередатчика (ПП) цифровой информации.
12.
Типовая система автоматического управления13.
Список использованных источников:■ https://docs.cntd.ru/document/1200141449/titles/8PA0LV
■ https://ru.wikipedia.org/wiki
■ https://ru.wikipedia.org/wiki/
■ http://books.ifmo.ru/file/pdf/2323.pdf