












 mechanics
mechanics industry
industrySimilar presentations:










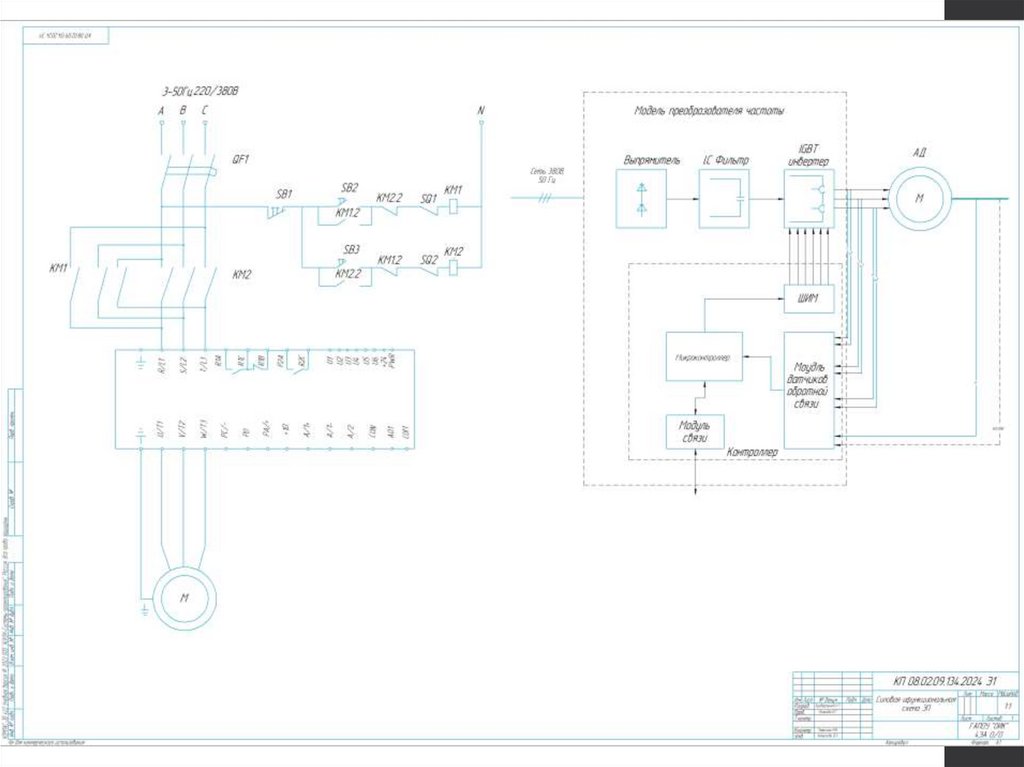
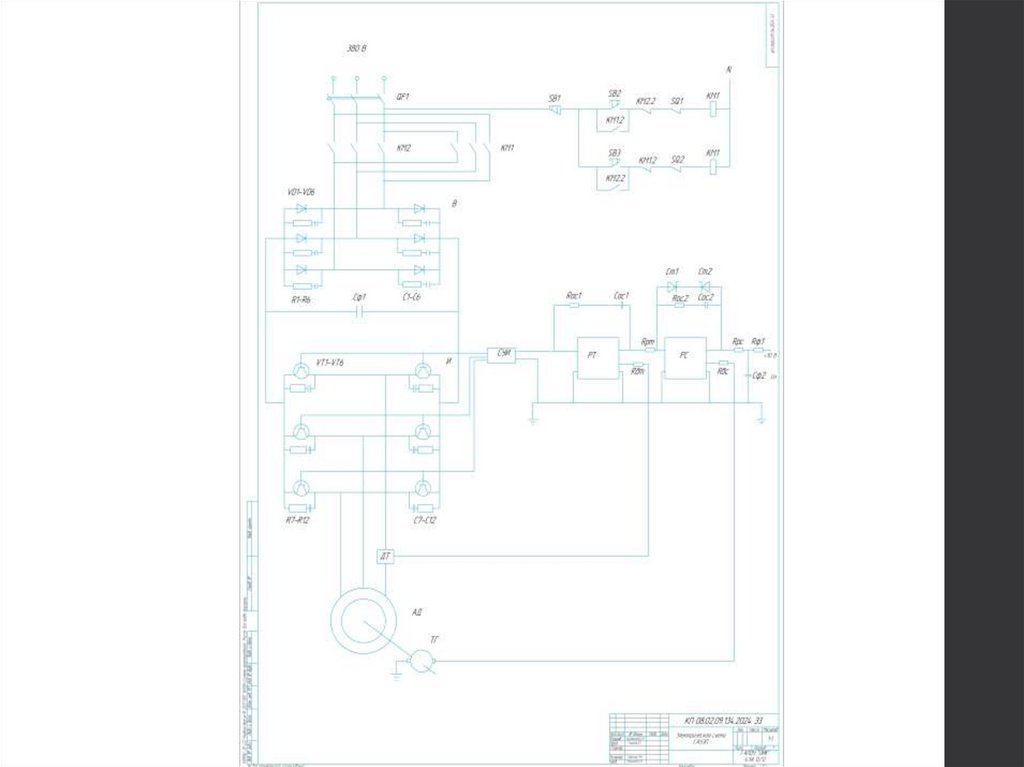
Система управления электропривода механизма передвижения мостового крана
1. Дипломный проект Система управления электропривода механизма передвижения мостового крана
ВЫПОЛНИЛ: КУПБЕРГЕНОВ ИСЛАМ ТАЛГАТОВИЧГР. 4 ЭА
2. Цель и задачи проекта
Цель дипломного проекта – проектирование системыуправления электропривода механизма передвижения
мостового крана.
Для достижения этой цели решаются следующие задачи:
• изучение назначения и технической характеристики оборудования;
• анализ работы оборудования и требования к СУЭП;
• анализ работы различных систем ЭП;
• расчет мощности и выбор двигателя привода;
• выбор преобразователя частоты;
• выбор основных электрических аппаратов управления и защиты;
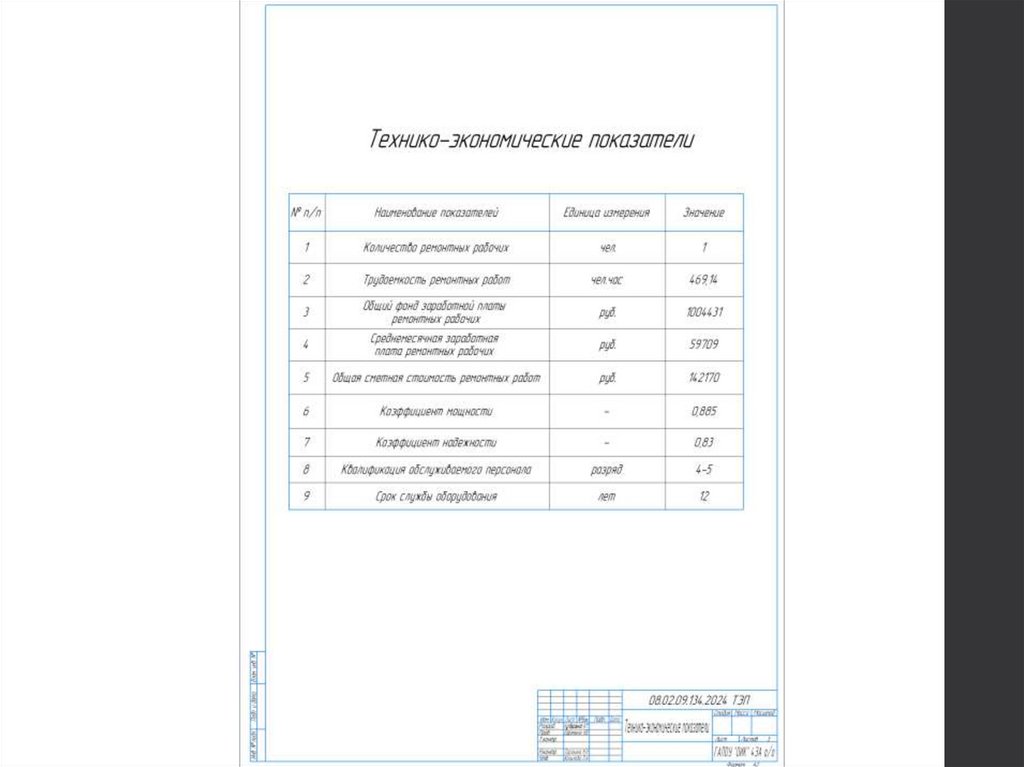
• расчет технико-экономических показателей;
• выполнение графической части.
3.
.Теоретическая часть
Конструкция крана в основном определяется из его
назначения и специфики технологического процесса. Ряд
узлов, например, механизм подъема и передвижения
выполняются однотипными для кранов различных видов.
4.
Асинхронныйэлектродвигатель
переменного тока
МТКH 312-6
Мощность – 15
кВт
Номинальная
частота вращения
– 970 об/мин
5.
Преобразователь частотыЕ4-8400-020Н.
Напряжение, В
380
Мощность, кВт
15
Iном., А
32
6. Аппараты защиты и управления
Автоматическийвыключатель типа ВА 51
Контактор
переменного тока
типа КМИ-23210
7. Питающий кабель для электродвигателя
ВВГ 4×4 мм28. В расчетно-экономической части дипломного проекта была рассмотрена организация ремонта и обслуживания электрооборудования на
электромонтажномучастке.
Была составлена таблица техникоэкономических показателей.
9. В специальной части был рассмотрен вопрос настройки преобразователя частоты.
10. В последней части пояснительной записки были отражены мероприятия по технике безопасности при обслуживании автоматизированного
электропривода.11. Расчет заземляющего устройства цеха
В качествегоризонтального
заземлителя
принимается стальная
полоса шириной 40мм.
В качестве
вертикального,
принимается стальной
пруток диаметром
20мм и длиной 4м